
DOI: 10.11817/j.issn.1672-7207.2016.10.013
������ڷ��ĺ���϶������������ѧ���Է����Ż�
�Ϸ���1��������1��������1���ŷ�1������ǿ2
(1. �人��ѧ �������еѧԺ������ �人��430072��
2. ���ҵ�������ƽ�ߵ����ɷ�����˾������ ƽ��ɽ��467001)
ժ Ҫ��
�Ի����ķ����Զ�̬���Ե�Ӱ�죻���ڼ�϶ʸ��ģ�ͣ���������϶��ת���ġ���ײ�¡�ģ�ͣ����������ķ����Ե�������ģ��ģ����ײ�����еķ������������Ŀ���Ħ��ģ��������ײ�����е�������������������ײ��ģ��Ƕ��ADAMS����ѧ���������У��о���ͬ�ļ�϶������뾶���Ӵ����Ħ�������Ի�������ѧ���Ե�Ӱ�졣Ȼ��������ڷ�����������������Ϊ�ɿ����ӣ��½Ӵ���ײ�����е����Ӵ�����Ϊ�������ӣ�������������L9(34)����������Ʒ������о������������϶���뾶��Ħ����������Ӱ������Ķ���ѧ���ԣ���϶���������ӵ�Ӱ������о����������������Ϊ�����˻������Ż������ɿ��Ե�����ṩ�ο���
�ؼ��ʣ�
��϶���Ӵ���ײ������ѧ��������ڷ�������������
��ͼ����ţ�TH113��TH112 ���ױ�־�룺A ���±�ţ�1672-7207(2016)10-3375-06
Dynamic characteristic analysis optimization of transmission mechanism with clearance based on Taguchi method
MENG Fangang1, WU Shijing1, ZHANG Zenglei1, ZHANG Fan1, ZHAO Wenqiang2
(1. School of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China;
2. Henan Pinggao Electric Co. Ltd., State Grid Corporation of China, Pingdingshan 467001, China)
Abstract: The effects of clearance joint on no-linear dynamic characteristics of mechanism were investigated. A collision-hinge model based on the clearance vector model was established by using modified nonlinear continuous contact force model and improved Coulomb friction model. Then the hybrid contact model was incorporated into ADAMS; the effects of clearance, radius of the pin axle and friction coefficient between contact surfaces on dynamic characteristics were conducted. Moreover��these parameters were set as controllable factors and the maximum contact force as noise factor by using Taguchi method. Then, the several experiments were investigated with these parameters using the L9 (mixed orthogonal array 34). The results show that clearance, radius and friction coefficient can affect the dynamic characteristics of transmission mechanism. In addition, clearance value is the most significant factor. Research methods and results of analysis can act as reference for optimal design and reliability improvement of linkage mechanism.
Key words: clearance; contact and collision; dynamic characteristics; Taguchi method; transmission mechanism
�ظ�ѹ��·�����������ؼ������豸�����е�ѹ��·����ȣ����ϵ���������Ӧ���죬��������Ҫ����ߡ��ظ�ѹ��·��һ���ɲٶ���������������������Ԫ����֧�ž�Ե�弰������5������ɡ��о��������ظ�ѹ��·�������У���е���ϵı���Զ���ڵ������ϣ����������������������������Ļ�е����ռ��Ҫ����[1]�����ԣ�������������ֱ�Ӿ������ظ�ѹ��·���Ŀɿ��ԡ�������ܶ�ѧ�߶Զ�·���������о�[2-4]�����Դ��������Ķ���ѧ���Է������Ƚ��١�����װ�䡢������ĥ�𣬻����½Ӵ��ļ�϶��ʵ�ʹ������Dz��ɱ����[5-8]����϶���������غɣ��ر��Ƕ��ڸ��ٴ������������»�������½Ӵ�����������ǿ�ҳ����ײ��������������ѣ����������Ե����¹ʣ���ˣ������˶����ļ�϶�Դ���������Ӱ�������Ҫ�������塣���ž��ܻ�е���̵ķ�չ���Ծ�ȷԤ��ϵͳ����ѧ����ΪҪ��Խ��Խ���У�����϶��������ѧ�Ѿ���Ϊ�������е��������Ҫ����Ĺؼ�����֮һ[9]��Ŀǰ��������Ժ���϶�Ļ��������Զ�̬���Խ����˴����о�[10-13]���о�������Ҫ���������˻�������������������Զ���ϵͳ�Ķ���ѧ�о�����[12]���������߲��÷����Ե�������ģ��ģ���϶���ĽӴ���ײ�������Ŀ���Ħ��ģ��������϶����Ħ������������϶�Ķ����˴�����������ѧģ�ͣ��������ڷ�������������Ʒ������о���ͬ�ļ�϶������뾶���Ӵ����Ħ���������ظ�ѹ��·�������˴�����������ѧ���ܵ�Ӱ�졣
1 �¼�϶��ײģ��
������ת��Լ����ͼ1��ʾ��������������ȫͬ�ġ�����ʵ�ʹ����У���϶�Ĵ���ʹ���������ײ���������ȫͬ�ģ����������������ӵ㴦�ڲ�ͬ��λ�ã�����ƫ�ľ࣬��ͼ2��ʾ(ͼ2�У�RBΪ���װ뾶��RJΪ����뾶��cΪ��϶)����������ת����ȣ�ʵ����ת����û�����������˶�Լ���ͼ���Լ��������������������ײ�����л�����Ӵ���ײ������������Լ������϶ʸ��ģ��ͨ����ƽ����������϶ʸ����������ת�µ��˶�״̬�������������ӵ�����λ�ü����λ�ñ仯�����
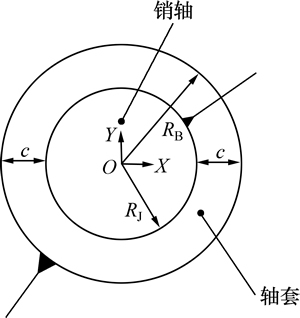
ͼ1 ������ת��ģ��ʾ��ͼ
Fig. 1 Sketch map of ideal revolution joint model
�ھֲ������ѿ�������ϵ�У������Ļ�ת����Ϊ��϶ʸ���Ļ���ʼ�㣬��϶ʸ���ķ���ָ����������������˶�ʱ��DZ�ڽӴ��㣬��DZ�ڽӴ��㹹�������������������ײ�㡣��϶ʸ���Ĵ�С���ϸ�������������ת����ΪԲ���������������ľ���ߴ繫��Ϊ�뾶�ļ�϶Բ�ڣ���ˣ���϶ʸ����С�ı仯�ܹ���ӳ�����ļӹ����[14]����϶������������İ뾶֮������ʾ��
c=RB-RJ (1)
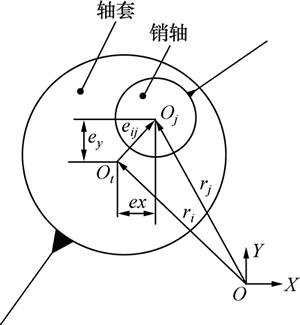
ͼ2 ʵ����ת��ģ��ʾ��ͼ
Fig. 2 Sketch map of realistic revolution joint model
ͼ2�У�ri��rj�ֱ��������������뾶��ƫ������Ϊ��
 (2)
(2)
 (3)
(3)
�����������ڽӴ��㴦�ĵ�λ������Ϊ
 (4)
(4)
��ײ�����������Ϊ
 (5)
(5)
Ϊ����������������ײ��������������ʧ������Ӵ���ײ�������ٶ�ʮ�ֱ�Ҫ��
�Ӵ���ķ����ٶ�vn�������ٶ�vt�ֱ�Ϊ��
 (6)
(6)
 (7)
(7)
��λ������t�ɵ�λ������n��ʱ����ת90�� ���á�
1.1 ��ײ�Ӵ���ģ��
�����Ե�������ģ����ͼ3��ʾ��ͼ3�У�KΪ���ɸն�ϵ����DΪ����ϵ����ģ���е��ɱ�ʾ����ײ����ĵ��ԣ������ʾ��ײ�����е�������ʧ���Ӵ��������������ڵ��ɵĸն�������������
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
ʽ�У�FkΪ��ײ�����е�������FdΪ������ģ�viΪ���ϵIJ���ϵ����EiΪ���ϵĵ���ģ���� Ϊ��ײǰײ����ij�ʼ����ٶȣ�ceΪ�ָ�ϵ�����ڽ����Ӵ��У�ָ��nͨ��ȡ1.5[9]��
Ϊ��ײǰײ����ij�ʼ����ٶȣ�ceΪ�ָ�ϵ�����ڽ����Ӵ��У�ָ��nͨ��ȡ1.5[9]��
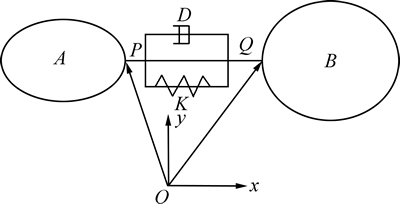
ͼ3 �����Ե�������ģ��ʾ��ͼ
Fig. 3 Sketch map of nonlinear spring-damper model
����ϵ�����Ƶ������У�����ָ�ϵ������Ϊ1������ֻ�ܱ�ʾ��Ļָ�ϵ������������С�Ļָ�ϵ��������[14]����������Ļָ�ϵ�����������������ϵ��������ײ�ָ�ϵ�������ƣ�����ʽΪ
 (12)
(12)
�������������ײ�Ӵ���ģ��Ϊ
 (13)
(13)
1.2 Ħ����ģ��
�˶�����϶����Ӵ�����ͨ������Ħ����ģ�����������Ŀ����˶����ļ�϶Ϊ�������ĸ�Ħ����Ϊ�ܹ�ȷ�������Ӵ���ײ�����е�Ħ��������������CoulombĦ����ģ��ģ����ײ�����е���������������ֵ����������ٶȷ���仯ʱ����Ħ���� ͻ�䡣
 (14)
(14)
 (15)
(15)
���У�vtΪ��������������ײ�����Ի����ٶȣ�vsΪ��Ħ���ٽ��ٶȣ�vdΪ���Ħ���ٽ��ٶȣ���sΪ��Ħ����������dΪ��Ħ��������
��Ħ�������滬���ٶȱ仯������ͼ4��ʾ��
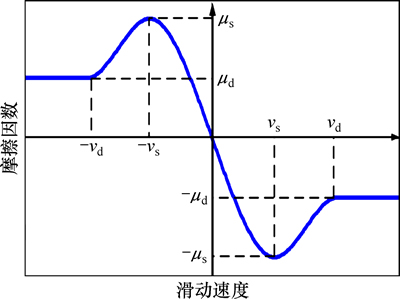
ͼ4 ��Ħ�������滬���ٶȱ仯����
Fig. 4 Relationship between coefficient of friction and slip velocity
2 ����������ɷ���
�ظ�ѹ��·������������ʵ�ַֺ�բ�����Ķ������������������ڴ����˶����ı����ķ�����ṹ��ͼ5��ʾ�����˽�ͷ1ֱ����Ϊ�����غɵ�����㣬����ͷ9�Ƕ�·���ؼ����ƶ���·��ͨ������ϵͳ���ٶ�ϵͳ������ϵͳ��ʵ�ֶ���ͷ9�뾲��ͷ10�ķֺϣ�ʵ�ֵ�����ͨ�ϡ���ʵ�ַֺ�բ�Ĺ����У����˽�ͷ1���г�Ϊ230 mm������ͷ9���г�Ϊ280 mm��
�����������ܷ��5���ϵIJ��־���һ���ĶԳ��ԣ����Ҳ���������ɶ�Ϊ1��ƽ��9���˻���������3���ƶ�����10����ת���������и����˹����������������1��ʾ��
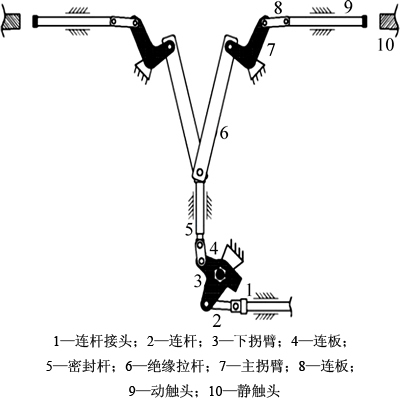
ͼ5 �ظ�ѹ��·����������ʾ��ͼ
Fig. 5 Connecting rod drive mechanism of Ultra-high voltage circuit breaker
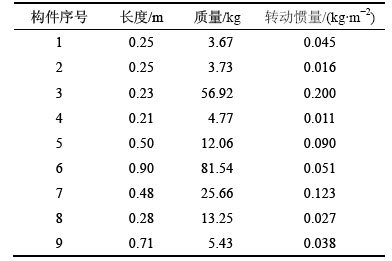
��1 ���������˵���������
Table 1 Parameters of the links in the mechanism
3 ��������ģ����ֵ��⼰����
3.1 ģ����ֵ���
ͨ��GFORCE�û������ӳ���������ײ�Ӵ�ģ��Ƕ�뵽ADAMS�����ڽ¼�϶��ײ�����г���ǿ�ҵķ�������������ˣ�����GSTIFF����ģ�ͽ�����⣬ѡ��SI1���ָ�ʽ�������ڸ��ƽӴ������㷨��������ʱ�䲽������Ϊ1 ms���������������2��ʾ��
3.2 ����ѧ��Ӧ����������
�ظ�ѹ��·�����˴����������и��١��������ԣ��ֺ�բ�����У��½Ӵ��Ӵ���ײ������ʹ�½Ӵ������ᷢ�����λ�ǿ���ƻ���ֱ��Ӱ�촫����������·���Ŀɿ��ԣ����������Ե����¹ʣ���ˣ��о���ײ���������в����ԽӴ�����Ӱ������ش����塣
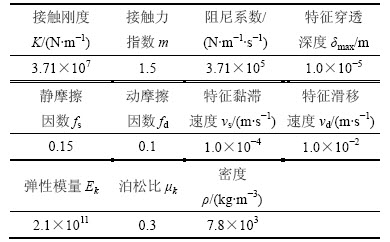
��2 ����������
Table 2 Parameters for simulation
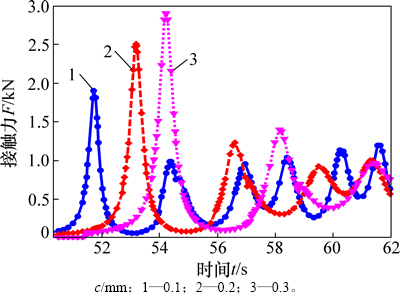
ͼ6 ��ͬ��϶�ĽӴ���ײ��
Fig. 6 Contact force of different clearances
ʵ�ʹ������������װ����ĥ�������ͬ�ļ�϶��������ͬ�ļ�϶ֵ�Դ��������Ķ���ѧ���Ե�Ӱ��ʮ�ֱ�Ҫ���趨��϶�ֱ�Ϊ0.1��0.2��0.3 mm��ͼ6��ʾΪ�½Ӵ���ײ�����в�ͬ��϶����ײ����Ӧ�������ͼ6��֪�����ż�϶���½Ӵ�����ײ����ֵԽ���ЧӦԽǿ������ʱ���Ͼ���һ�����ͺ��ԡ���ʵ�ʹ����У�����ļ�϶���½½Ӵ���ײ��������ʹ��������ײ�����з����ϴ�ı��λ�ǿ���ƻ������ͻ������˶����ȣ����ͻ����Ŀɿ��ԡ�
������ת�µļ�϶���䣬������ͬ������뾶�Դ��������Ķ���ѧ���Ե�Ӱ�죬����ʵ�ʹ����趨����뾶R�ֱ�Ϊ15��20��25 mm��ͼ7��ʾ�½Ӵ���ײ�����в�ͬ����뾶�ĽӴ���ײ����Ӧ�������ͼ7��֪����������뾶�������������н½Ӵ���ײ���ķ�ֵ������ʽ(9)��֪�����������İ뾶������ʹ��ײ�����еĽӴ��ն��������ǵ�����ײ���ķ�ֵ����ԭ��֮һ��
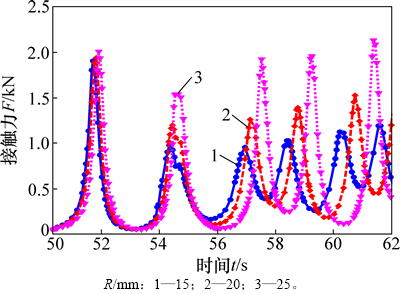
ͼ7 ��ͬ����뾶�ĽӴ���ײ��
Fig. 7 Contact force of different radius of pin axle
Ϊ���о�Ħ�������Ի�������ѧ���ܵ�Ӱ�죬����3�ֳ��ý�������Ħ�������ĽӴ���ײ�����������֡�����ͭ��������ī�������������ϸ�Ħ���������3��ʾ��ͼ8��ʾΪ��ͬ�Ӵ���Ħ����������ײ����Ӧ�������ͼ8�ɼ�������ֲ��ϽӴ������ײ����ֵ�������ͭ��������ī�����ĽӴ�����Խ�С���ұȽϽӽ���������Ϊ����ֲ��ϵĶ�Ħ������С����ײ���������ĵ����������������ĽӴ���ײ�����������ң�������ͭ��������ī�������ϵĶ�Ħ�������ϴ�����������ĵ������Ͽ죬����Ӵ���ײ���ķ�ֵ��С���������о����������Ħ�������Ի����Ķ���ѧ���Ծ�����ҪӰ�졣
��3 ��������֮���Ħ������(��Ħ��)
Table 3 Friction coefficient between metal materials (dry friction)

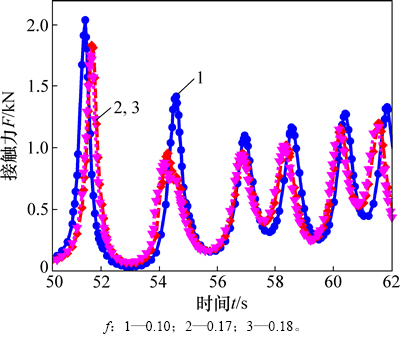
ͼ8 ��ͬĦ�������ĽӴ���ײ��
Fig. 8 Contact force of different friction coefficient
4 ��ڷ�������
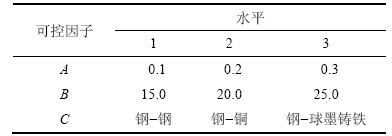
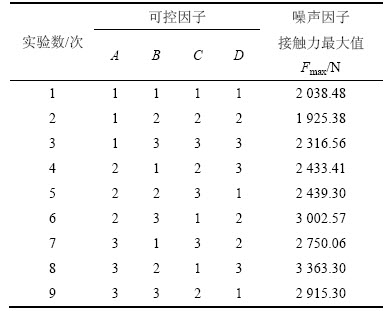
��ڷ����ѹ㷺Ӧ���ڹ��������������У�����Ч�ļ����������[15-16]�����IJ�����ڷ����Դ��������½Ӵ���ײ���̽����Ƚ�����Ƽ������������ɿ�����ˮƽ��ѡ�����4��ʾ������A�������������ļ�϶(mm)��B��������İ뾶(mm)��C������ͬ���ϵ����������Ӵ����Ħ�����������⣬ѡ���������������н½Ӵ���ײ�����е����Ӵ�����Ϊ�������ӡ����ݿɿ����ӵ������ɶȣ�����L9(34)����ʵ��������5��ʾ������D������ڷ���δ���ǵĿɿ����ӡ�
��4 �ɿ�����ˮƽ��
Table 4 Levels of controllable factors
��5 ����������
Table 5 Result of orthogonal array experiment
Ϊ�о�ϵͳ���Ƚ��ԣ���ڷ�����������Ƚ�����������ϵͳ���о�Ʒ�ʾ�����С���ԡ��ɿ����Ӹ�ˮƽ�µ�����ȷ���������6��ʾ���ɱ�6��֪������A�ļ������ˮƽ��������Ϊ3.15 dB�����������A��B��CӰ���С��������D��Ӱ��Ҳ������A��С��˵�������о��Ѿ����ǵ�����Ҫ���ӡ�
��6 �ɿ����Ӹ�ˮƽ�µ������
Table 6 Signal to notes ratio at different level of controllable factors

�������Ϸ��������֪����ϵͳ�н¼�϶�����Ӵ���ײ����ֵӰ���������ǽӴ����Ħ������������İ뾶Ӱ����С���Բ���ѡ�����ŷ���ΪA1B1C3��
5 ����
1) �ڸ�����ײ�����У���ת�½Ӵ���ײ�Ӵ�����ϵ�Ħ������������İ뾶���¼�϶����Ի�������ѧ���ܲ�����ҪӰ�졣�ʵ���С�¼�϶����С����뾶������Ӵ������Ħ�����������ܼ�С������ײ�����е���ײ����ֵ��
2) ��ϵͳ�н¼�϶�Ի�������ѧ����Ӱ���������ǽӴ���Ħ������������İ뾶Ӱ����С����ϵͳ�������ŷ���ΪA1B1C3��
3) ���Ľ����ĺ���϶�Ļ�������ѧģ�ͽ����ڷ������о�����������Ϊ�����˻������Ż������ɿ��Ե�����ṩ�ο��������ڹ���ʵ��Ӧ�á�
�ο����ף�
[1] ���, ����, Ԭ��½. 1999-2003���ѹ��·�����з���[J]. �����豸, 2005, 6(2): 6-13.
SONG Hao, CUI Jingchun, YUAN Dalu. Operating analysis of high voltage circuit breaker in 1999-2003[J]. Electrical Equipment, 2005, 6(2): 6-13.
[2] ��ΰ, ���. ��ѹ��·��Һѹ�ٶ��������Է���[J]. ��е����ѧ��, 2010, 46(10): 148-155.
LIU Wei, XU Bing. Characteristic analysis of high voltage circuit breaker with hydraulic operating mechanism[J]. Journal of Mechanical Engineering, 2010, 46(10): 148-155.
[3] YOO W S, KIM S O, SOHN J H. Dynamic analysis and design of a high voltage circuit breaker with spring operating mechanism[J]. Journal of Mechanical Science and Technology, 2007, 21(12): 2101-2107.
[4] ����÷, �ս�ƽ. ������ն�·�����ɻ������㼰�Ľ�[J]. ú���е, 2014, 35(9): 34-36.
L Taomei, TAO Jiangping. Calculation and improvement of spring operating mine-used device for vacuum circuit breaker[J]. Coal Mine Machinery, 2014, 35(9): 34-36.
Taomei, TAO Jiangping. Calculation and improvement of spring operating mine-used device for vacuum circuit breaker[J]. Coal Mine Machinery, 2014, 35(9): 34-36.
[5] ERKAYA S, UZMAY I. Investigation on effect of joint clearance on dynamic of four-bar mechanism[J]. Nonlinear Dynamic, 2009, 58(1/2): 179-198.
[6] ERKAYA S, UZMAY I. A neural-genetic(NN-GA) approach for optimizing mechanisms having joints with clearance[J]. Multibody System Dynamics, 2008, 20(1/2): 69-83.
[7] FLORES P. Modeling and simulation of wear in revolute clearance joints in multibody systems[J]. Mechanism and Machine Theory, 2009, 44(6): 1211-1222.
[8] KHEMILI I, ROMDHANE L. Dynamic analysis of a flexible slider-crank mechanism with clearance[J]. European Journal of Mechanics A: Solids, 2008, 27: 882-898.
[9] ������, ����. �����˶�����϶�Ļ�����̬�����о�[J]. ������, 2011, 30(11): 17-19.
BAI Zhengfeng, ZHAO Yang, Dynamic characteristics of mechanisms with joint clearance[J]. Journal of Vibration and Shock, 2011, 30(11): 17-19.
[10] FLORES P, AMBROSIO J, CLARO H C P, et al. A study on dynamic of mechanical systems including joints with clearance and lubrication[J]. Mechanism and Machine Theory, 2006, 41: 247-261.
[11] ԬӢ��, ������. ���˶�����϶����ת����ʽ��ҳ�����Ķ�̬��Ӧ����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(4): 972-976.
YUAN Yingcai, LIU Yilun. Nonlinear dynamic response of offset press��s fold mechanism with clearances[J]. Journal of Central South University (Science and Technology), 2011, 42(4): 972-976.
[12] ZHENG Enlai, ZHOU Xinlong. Modeling and simulation of flexible slider-crank mechanism with clearance for a closed high speed press system[J]. Mechanism and Machine Theory, 2014, 74: 10-30.
[13] ʱ��, ����. �������������Ļ�е��϶��ת�½�ģ�붯��ѧ����[J]. ��е����ѧ��, 2009, 45(4): 299-303.
SHI Bing, JIN Ye. Dynamic simulation and modeling of revolute clearance joint for virtual prototyping[J]. Journal of Mechanical Engineering, 2009, 45(4): 299-303.
[14] ��־Ӣ, ½����. ���ڻָ�ϵ������ײ����ģ�ͷ���[J]. ����ѧ�����ѧ��, 2006, 4(4): 294-298.
QIN Zhiying, LU Qishao. Analysis of Impact Process model Based on Restitution coefficient[J]. Journal of Dynamic and Control, 2006, 4(4): 294-298.
[15] PALANIKUMAR K. Experimental investigation and optimisation in drilling of GFRP composites[J]. Measurement, 2011, 44: 2138-2148.
[16]  H. Determining the effect of cutting parameters on surface roughness in hard turning using the Taguchi method[J]. Measurement, 2011, 44(9): 1697-1704.
H. Determining the effect of cutting parameters on surface roughness in hard turning using the Taguchi method[J]. Measurement, 2011, 44(9): 1697-1704.
(�༭ �Կ�)
�ո����ڣ�2015-10-08�������ڣ�2015-12-31
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51375350)������ʡ�Ƽ����ص���Ŀ(2011132094)�����ҵ�����˾�Ƽ���Ŀ(208239881)(Project(51375350) supported by the National Natural Science Foundation of China, Project(2011132094) supported by Technology Department of Hubei Province of China; Project(208239881) supported by State Grid Corporation of China)
ͨ�����ߣ������������ڣ���ʿ����ʦ�����»�е���ӹ����о���E-mail��wsj@whu.edu.cn
ժҪ���о��˶�����϶�Ի����ķ����Զ�̬���Ե�Ӱ�죻���ڼ�϶ʸ��ģ�ͣ���������϶��ת���ġ���ײ�¡�ģ�ͣ����������ķ����Ե�������ģ��ģ����ײ�����еķ������������Ŀ���Ħ��ģ��������ײ�����е�������������������ײ��ģ��Ƕ��ADAMS����ѧ���������У��о���ͬ�ļ�϶������뾶���Ӵ����Ħ�������Ի�������ѧ���Ե�Ӱ�졣Ȼ��������ڷ�����������������Ϊ�ɿ����ӣ��½Ӵ���ײ�����е����Ӵ�����Ϊ�������ӣ�������������L9(34)����������Ʒ������о������������϶���뾶��Ħ����������Ӱ������Ķ���ѧ���ԣ���϶���������ӵ�Ӱ������о����������������Ϊ�����˻������Ż������ɿ��Ե�����ṩ�ο���
[1] ���, ����, Ԭ��½. 1999-2003���ѹ��·�����з���[J]. �����豸, 2005, 6(2): 6-13.
[2] ��ΰ, ���. ��ѹ��·��Һѹ�ٶ��������Է���[J]. ��е����ѧ��, 2010, 46(10): 148-155.
[4] ����÷, �ս�ƽ. ������ն�·�����ɻ������㼰�Ľ�[J]. ú���е, 2014, 35(9): 34-36.
[9] ������, ����. �����˶�����϶�Ļ�����̬�����о�[J]. ������, 2011, 30(11): 17-19.
[13] ʱ��, ����. �������������Ļ�е��϶��ת�½�ģ�붯��ѧ����[J]. ��е����ѧ��, 2009, 45(4): 299-303.
[14] ��־Ӣ, ½����. ���ڻָ�ϵ������ײ����ģ�ͷ���[J]. ����ѧ�����ѧ��, 2006, 4(4): 294-298.
