
���ڻ���������䷽��������ͬ�����
���������ܷ���
��ǿ1����˫��1������ǿ2���ż��1
(1. �������´�ѧ ��Ϣ��ѧ����ѧԺ������ ������116026��
2. ����������ѧ ��������ѧԺ������ ������116024)
ժ Ҫ��
ͬ���綯�������ö˿��ܿع��ܶ�ģ��(PCH)���Ե��ģ�ͽ����о��������û���������䷽�����PCH���ģ����Ƶ���ڸ���ת����֪ʱ�Ŀ���������ת��δ֪ʱ�Ŀ�������ת�ع۲�����Ϊ����������ͬ���������ϵͳ�ṩһ���ܺõĽ������������ʵ�����������ý����������Ҫ��������������ȷ�������ڣ�ϵͳ�ܿ��ٴﵽ�����ȶ�����Ӧʱ�������Ӧƽ����������̬���ܺã��Ը��صı仯���к�ǿ����Ӧ�Ժ��Ŷ�����������
�ؼ��ʣ�
����ͬ�����������������������ܶ����۲�����
��ͼ����ţ�TP271+61 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-1003-06
Permanent magnet synchronous motor control and performance analysis based on interconnection and damping assignment
GE Jian-qiang1, YU Shuang-he1, YANG Zhen-qiang2, DU Jia-lu1
(1. School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China;
2. School of Electrical Engineering, Dalian University of Technology, Dalian 116024, China)
Abstract: A high performance speed controller for a surface permanent magnet synchronous motor (PMSM) drive was designed. First, the motor model was studied by port controlled Hamiltonian (PCH) model. Then, the interconnection and damping assignment (IDA) approach with the PCH motor model was used to design the controller while the load torque is known, and the controller and the torque observer was designed while load torque is unknown. This provides a good solution for the nonlinear PMSM control system. Through the simulation experiment, the solution needs fewer parameters and the meaning is clear and easy to adjust, the system can quickly reach asymptotically stability. The response time is short and the response process is smooth without overshoot. The system has good dynamic performance, and has a strong adaptation and disturbance rejection to the changes of load.
Key words: permanent magnet synchronous motor; interconnection and damping assignment; Hamiltonian; observer
����ͬ�������һ�ַ����ԵĻ�������ת��װ ��[1]����������ͬ������Ĺ㷺Ӧ�ã��Ѿ����˲��ٿ��Ʒ������練�����Ի����ơ�����������ϵͳ�������Կ��ſ���[2]�ȣ���Щ�����Ե��ģ�;���Ҫ��ܸߣ��㷨���ӣ�������ʵ�֡����о������ù㷺������������ѧ��������ѧ�����̿�ѧ���ڶ�����Ĺ��ܶ�ϵͳģ��[3]���������Ƕ�����������ͬ������ķ��������⣬����ƿ��������Ը��ؽ��й۲⡣���ڶ˿��ܿصĺ�ɢ���ܶ�(Port controlled Hamiltonian, PCHD)ϵͳ������ƽ�⡢��Դ�Ժ��ȶ����ڲ�������[2, 4]�ж��н��ܣ�����Ϲ��ܶ�ģ��չ���ı������������������Ʒ���(Interconnection and damping assignment passivity-based control, IDA-PBC)���о�Ҳȡ���˺ܴ�Ľ�չ[5-8]��
1 PCHDģ�͵�IDA-PBC���
�˿��ܿصĺ�ɢ���ܶ�(PCHD)ϵͳ��ʽΪ
 (1)
(1)
ʽ�У�x![]() Rn������������u, y
Rn������������u, y![]() Rm��R(x)Ϊ�������Գƾ���R(x)=RT(x)��0��R(x)��ӳ���ǹ��ܶ�ϵͳ�������ɢ�ṹ��J(x)Ϊ���Գƾ���J(x)=-J T(x)��J(x)��ӳ���ǹ��ܶ�ϵͳ���ڲ������ṹ��J(x)��R(x)����״̬x��ƽ��������H(x)��Rn��R����ϵͳ�洢����������
Rm��R(x)Ϊ�������Գƾ���R(x)=RT(x)��0��R(x)��ӳ���ǹ��ܶ�ϵͳ�������ɢ�ṹ��J(x)Ϊ���Գƾ���J(x)=-J T(x)��J(x)��ӳ���ǹ��ܶ�ϵͳ���ڲ������ṹ��J(x)��R(x)����״̬x��ƽ��������H(x)��Rn��R����ϵͳ�洢����������
IDA-PBC����Ŀ�����ҵ���̬״̬��������u=��(x)ʹ�ջ�ϵͳ��̬ʱPCHDϵͳ�����к�ɢ����ʽ��
![]() (2)
(2)
ʽ�У�Hd(x)���µ�����������������ƽ���x*���ϸ�ֲ���Сֵ��![]() �������Ļ�������
�������Ļ�������![]() ��0��������������������ϵͳ�Ŀ�����ʱ����ϵͳ�ֽ�ΪPCHDģʽ��������J(x)��R(x)��H(x)��g(x)��������ƽ���x*
��0��������������������ϵͳ�Ŀ�����ʱ����ϵͳ�ֽ�ΪPCHDģʽ��������J(x)��R(x)��H(x)��g(x)��������ƽ���x*![]() Rn���������ҵ�����uΪ��(x)��Jd(x)��Rd(x)��һ��ʸ������K(x)���㣺
Rn���������ҵ�����uΪ��(x)��Jd(x)��Rd(x)��һ��ʸ������K(x)���㣺
![]()
![]() (3)
(3)
�Ҿ�������������
(1) �ṹ�غ㣬Ϊ
![]() (4)
(4)
(2) �ɻ��ԣ���K(x)�DZ����������ݶȣ�������
![]() (5)
(5)
(3) ������ƽ���x*����K(x)����
![]() (6)
(6)
ʽ(6)��Hd(x)��x*�����ڼ�ֵ��������
(4) Lyapunov�ȶ��ԣ�����x*����K(x)���ſɱȾ�������
![]() (7)
(7)
ʽ(7)��Hd(x)��x*��������Сֵ��������
����Щ�����£��ջ�ϵͳ������ʽ(2)�����ĺ�ɢ��PCHDϵͳ��x*Ϊ�ջ�ϵͳһ���ȶ���ƽ��㡣��������Hd(x)��Ha(x)Ϊ
 (8)
(8)
������
![]() (9)
(9)
Ha(x)Ϊһ��������������ʾ�ܹ�����ע�뵽ϵͳ�����������⣬���������ʽ(9)�еıջ�ϵͳ��伯����{x*}����ôϵͳ���ǽ����ȶ��ġ�������Ĺ���������н�ˮƽ��{x![]() Rn|H(x)��c}������
Rn|H(x)��c}������
2 ����ͬ�����IDA-PBC���
2.1 ����PCH��PMSMģ�ͷֽ�
d-q����ϵ�µ�PMSMģ��[9]Ϊ
 (10)
(10)
ʽ�У�J��ת��������Ld��Lq�ǵ����d-q����ϵ�µĶ��ӵ�У�Rs�Ƕ��ӵ��裻��L�Ǹ���ת�أ�f������������Ĵ�����P�ǵ���ļ�����������ת�ӽ��ٶȣ��������ٶȦ�e�Ĺ�ϵΪ��e=P�ء�
��������
![]() (11)
(11)
ʽ�У�D=diag[Ld, Lq, J]��
ȡϵͳ����������Ϊ
![]() (12)
(12)
��ϵͳ��е�ܺ͵���֮�͡���ʽ(10)���Խ�������PCHģ��ķֽ⣺
 (13)
(13)
 (14)
(14)
ʽ(10)��Ч��ϵͳ
 (15)
(15)
2.2 ƽ������
���ת��/��������Ҳ�Ƶ�λ����������ת�صĿ��ƣ�����ʽ����ͬ�������ʹ�ý϶��һ�ֵ������Ʋ��ԡ���������ͬ����������ת��/�����켣����q�ᣬ���ԣ������ת��/�������ƾ���id=0���ƣ���ʱLd=Lq���ڸ��ؾئ�L��֪ʱ�����ݡ����ת��/������ԭ������ʽ(10)��(11)�ɵ�������ƽ���Ϊ
 (16)
(16)
2.3 ����ת����֪ʱ�����������
ȡϵͳ�����Ĺ��ܶٺ���
![]() (17)
(17)
ѡ��
 ��
�� (18)
(18)
ʽ�У�Jij��riΪ�����Ļ���������ϵ����r1��r2������0��
��ǰ��IDA-PBC��ԭ������������
 (19)
(19)
ȡ��(x)=u���ҽ�ʽ(19)����ʽ(3)�ɵã�
![]() (20)
(20)
�ٽ�ʽ(4)��(11)��(13)��(14)��(16)��(18)����ʽ(20)��������ɵã�
 (21)
(21)
��(11)ʽ����(21)ʽ�еĵ�3����ʽ�м���ã�
![]() (22)
(22)
Ҫʹʽ(22)����������ȡJ23=-PLdid��J13=-PLdiq��Ȼ��ȡJ12=0����ʽ(21)��������Ld-Lq=0�����ɵø���ת����֪ʱ�Ŀ���������Ϊ��
 (23)
(23)
2.4 �ȶ��Է���
��ʽ(17)��(19)�ɵã�
 (24)
(24)
��x=x*ʱ��![]() ����Hd(x)�ĺ�ɭ����
����Hd(x)�ĺ�ɭ����![]() ��0 (����)����ʽ(24)������֤��ʽ(5)��(6)
��0 (����)����ʽ(24)������֤��ʽ(5)��(6)
��(7)��������ˣ��ջ�ϵͳ��ƽ������ȶ��ġ�������LaSalle���伯ԭ����ʽ(9)��������ý����ȶ��ԡ�
2.5 ����ת��δ֪ʱ�Ŀ��������
��ʵ��ϵͳ�У�����ת��������δ֪�ģ����ء�id��iq�ǿɲ�����ģ�������������У���ķ������츺��ת�ع۲���Ϊ��
 (25)
(25)
ʽ�У�l1��l2�ǿɵ��ڵIJ�������ת����֪ʱ��ʽ(10)֪��(��-![]() ����Ϊ0�����������
����Ϊ0�����������![]() ��
��![]()
![]() ����ʽ(25)�ɵ���̬����Ϊ
����ʽ(25)�ɵ���̬����Ϊ
 (26)
(26)
��ʽ(26)�ã�
 (27)
(27)
 (28)
(28)
��l1��0��l2��0ʱ���۲����ǽ����ȶ��ġ����۲�������������-p(p��0)���У�
 (29)
(29)
ѡ����ʵ�p������ʹ����ת�ع�����ָ��Ѹ��˥�����㣬�Ӷ�ʹ![]() Ѹ����������L��
Ѹ����������L��
����ת��δ֪ʱ����L��![]() �ı仯��δӰ��ƽϵͳ�Ĺ��ܶٽṹ���������ԣ�ֻ��Ҫ��
�ı仯��δӰ��ƽϵͳ�Ĺ��ܶٽṹ���������ԣ�ֻ��Ҫ��![]() �滻ƽ���x*��ʽ(23)�еĦ�L������ת��δ֪ʱ�Ŀ�����Ϊ��
�滻ƽ���x*��ʽ(23)�еĦ�L������ת��δ֪ʱ�Ŀ�����Ϊ��
 (30)
(30)
���ո���ת����֪ʱ�ȶ��Եķ���������ͬ���ɵõ�����ת��δ֪ʱ��ƽ����ǽ����ȶ��ġ�
3 ����ʵ��
����ϵͳ������SIMULINK������ͼ1��ʾ��

ͼ1 ϵͳSIMULINK����ͼ
Fig.1 Diagram of system simulation SIMULINK
��ͼ1�У���Ҫģ���п�����ģ�顢SVPWMģ�顢IGBT���ʹ�ģ�顢PMSM�����ģ�����δ֪ʱ��ת�ع۲�ģ�顣
3.1 ����ת����֪ʱ�ķ���
��ͼ1�У���������������![]() ֱ�����������ĸ���ת���ϣ���Ϊ����ת����֪ʱ�ķ��档�趨���������£�Rs=2.875 ����Ld=Lq=0.008 5H��P=4��f=0.175Wb��J=0.8 g��m2��Vdc=310 V���趨�������ʱ���ܳ�Ϊ0.3 s����ʼת��Ϊ500 r/min����0.1 sʱ��ת��Ϊ800 r/min���趨�����ʼ����ת��Ϊ0.5 N��m����0.2 sʱ��ͻ��Ϊ1 N��m��ȡr1=r2=1ʱ��������й��̶�����������͵��ת����Ӧ������ͼ2��ͼ3��ʾ����ͼ4���Կ�������ȡr1��r2Ϊ0��1��3ʱ��r1��r2Ӱ��ϵͳ�ij������Ϳ����ԣ�ϵͳ�ܴﵽ�ȶ�������̬�������ҿ�����Ӧ��
ֱ�����������ĸ���ת���ϣ���Ϊ����ת����֪ʱ�ķ��档�趨���������£�Rs=2.875 ����Ld=Lq=0.008 5H��P=4��f=0.175Wb��J=0.8 g��m2��Vdc=310 V���趨�������ʱ���ܳ�Ϊ0.3 s����ʼת��Ϊ500 r/min����0.1 sʱ��ת��Ϊ800 r/min���趨�����ʼ����ת��Ϊ0.5 N��m����0.2 sʱ��ͻ��Ϊ1 N��m��ȡr1=r2=1ʱ��������й��̶�����������͵��ת����Ӧ������ͼ2��ͼ3��ʾ����ͼ4���Կ�������ȡr1��r2Ϊ0��1��3ʱ��r1��r2Ӱ��ϵͳ�ij������Ϳ����ԣ�ϵͳ�ܴﵽ�ȶ�������̬�������ҿ�����Ӧ��
3.2 ����ת��δ֪ʱ�ķ���
����ת��δ֪ʱ�ķ�������Ϊͼ1��ʾ��������̸�����ѡ������֪ʱ�IJ���ѡ�����⣬ȡr1=r2=1��p=1 5000����l1=2p=30 000��l2=-Jp2=-180 000��ת����Ӧ��ͼ5��ʾ��PΪ50��1 000��15 000ʱת�ٵ���Ӧ��ͼ6��ʾ����ͼ6���Կ�����pԽ����ϵͳ����ӦԽ�죻p̫С����ת����Ӧ��������ﵽ��̬����ʱ�����Գ���
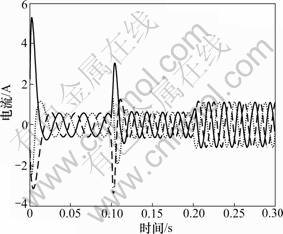
ͼ2 �綯�������������Ӧ
Fig.2 Motor 3-phase current response
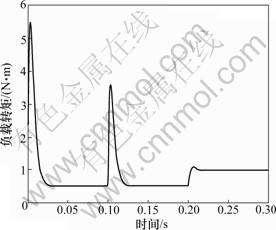
ͼ3 ���ת����Ӧ
Fig.3 Electromagnetic torque response
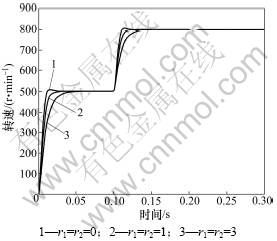
ͼ4 ��ͬr1��r2ʱ���ٶ���Ӧ
Fig.4 Speed response at different r1 and r2 values
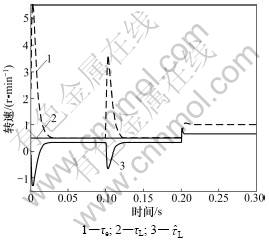
ͼ5 ��L����e��![]() ����Ӧ
����Ӧ
Fig.5 Response of ��L, ��e and![]()
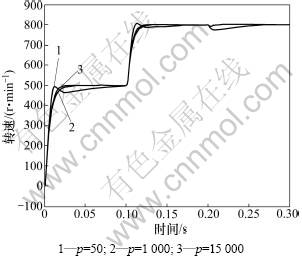
ͼ6 p=50��1 000��15 000ʱת�ٵ���Ӧ
Fig.6 Speed response when p=50, 1 000 and 15 000
4 ����
���ö˿��ܿصĺ�ɢ���ܶ�ϵͳģ�ͣ���ϱ������������������Ʒ��������ԭ�����������ʽ����ͬ������Ŀ���������������������˸���ת�ع���ģ�飬��������ϵͳ���ȶ��ԡ�����ƵĿ���ϵͳ����������������ȷ�����ڷ��㡣�����������������÷�����ƵĿ���ϵͳ���к�ǿ�Ŀ�����������ϵͳ���ȶ����ɿ��������ٶȿ죬���й�����ʵ��Ӧ��ǰ����
�ο����ף�
[1] �ں���, ������, �Կ���. ���غ㶨δ֪ʱ����ͬ������Ĺ��ܶٿ��Ʒ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(s1): 194-198.
YU Hai-sheng, WANG Hai-liang, ZHAO Ke-you. Hamiltonian control method of permanent magnet synchronous motor with unknown load[J]. Journal of Central South University: National Science, 2005, 36(s1): 194-198.
[2] ���ú�. �����綯���ķ����Կ���[M]. ����: ���ӹ�ҵ������, 2009.
WANG Jiu-he. Nonlinear control of AC motor[M]. Beijing: Electronics Industry Press, 2009.
[3] ����, ������. �������������߹�����ܶٿ���ϵͳ�о��½�չ[J]. ɽ����ѧѧ��: ��ѧ��, 2009, 39(3): 47-55.
LIU Yu-chang, WANG Yu-zhen. New development of energy- based on generalized controlled Hamiltoniom systems[J]. Journal of Shandong University: Engineering Science, 2009, 39(3): 47-55.
[4] Cheng D, Spurgeon S. Stabilization of Hamiltonian systems with dissipation[J]. Int J Control, 2001, 74(5): 465-473.
[5] WANG Yu-zhen, LI Chun-wen, CHENG Dai-zhan. New approaches to generalized Hamiltonian realization of autonomous nonlinear systems[J]. Science in China, Series F, 2003, 46(6): 431-444.
[6] Guo Y, Xi Z, Cheng D. Speed regulation of permanent magnet synchronous motor via feedback dissipative Hamiltonian realization[J]. IET Control Theory Appl, 2007, 1(1): 281-290.
[7] Ortega R, Van der Schaft A, Maschke B, et al. Interconnectionand damping assignment passivity based control of port controlled Hamiltonian systems[J]. Automatica, 2002, 38(4): 585-596.
[8] Ortega R, Van der Schaft A, Maschke B, et al. Energyshaping of port controlled Hamiltonian systems by interconnection[C]// Proceedings of the 38th IEEE Conference on Decision and Control (1999). Arizona, USA: IEEE, 1999: 1646-1651.
[9] Delaleau E, Stankovic A M. Flatness-based hierarchical control of PM synchronous motors[C]//Proceeding of the 2004 American Control Conference. Boston: American Control Conference, 2004: 65-70.
(�༭ ����)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(51079013)�������������������˲�֧�ּƻ���Ŀ������ʡ�Ƽ��ƻ���Ŀ�������пƼ�����������Ŀ
ͨ�����ߣ���˫��(1968-)���У������������ˣ����ڣ������Զ������о����绰��0411-84723025; E-mail: shuanghe@dlmu.edu.cn
ժҪ���������ʽ����ͬ���綯�������ö˿��ܿع��ܶ�ģ��(PCH)���Ե��ģ�ͽ����о��������û���������䷽�����PCH���ģ����Ƶ���ڸ���ת����֪ʱ�Ŀ���������ת��δ֪ʱ�Ŀ�������ת�ع۲�����Ϊ����������ͬ���������ϵͳ�ṩһ���ܺõĽ������������ʵ�����������ý����������Ҫ��������������ȷ�������ڣ�ϵͳ�ܿ��ٴﵽ�����ȶ�����Ӧʱ�������Ӧƽ����������̬���ܺã��Ը��صı仯���к�ǿ����Ӧ�Ժ��Ŷ�����������
