
һ�������ಽ�������İ뱻��˫�㲽�л�����
��������άɽ����������
(��������ҵ��ѧ �����˼�����ϵͳ�����ص�ʵ���ң������� ��������150001)
ժҪ����뱻��˫�㲽�л����������õĿ��Ʒ�������Ϊ���ӣ�����ȱ�����Ʋ����Ի���������Ӱ��Ķ��������������ಽ�е�������ѧ�о��õ����������һ�ְ뱻��˫�㲽�л����˵Ŀ��Ʒ����������������ÿ��Ʒ����������Ի��������ܵ�Ӱ�졣�ڻ����˰ڶ�����ط�����ײ��ʼ���Źؽڴ�ʩ�ӷ������أ���Ϊ�������롣���ò�̬���з������������˵��ȶ��ԣ����������ٲ����ܺĺ��������˵IJ���Ч�ʡ����ȶ��ԡ�Ч�ʺͲ����ٶ���Ϊ��������������ָ�꣬ͨ������õ����ء���������ʱ���б�½Ƕ�3�������Ի��������ܵ�Ӱ�졣����������1������������û�����������û����˾��������ಽ�����Ƶĸ�����Ч�ʡ��û������ܹ�ʵ�������¡����º�ƽ�ز��С�
�ؼ��ʣ�
�뱻�����������������ȶ�����Ч�����ٶ���
��ͼ����ţ�TP24 ���ױ�־�룺A ���±�ţ�1672-7207(2011)04-1028-07
A quasi-passive dynamic walker inspired by human walking
NI Xiu-hua, CHEN Wei-shan, LIU Jun-kao, SHI Sheng-jun
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China)
Abstract: Since the present control methods for quasi-passive dynamic walkers are complex, and few quantitative study of the control parameters on the performance of quasi-passive dynamic walkers has been done, inspired by biomechanics in human walking, a control method for the quasi-passive dynamic walker and quantitative control parameters on the performance of the quasi-passive dynamic walker were studied. After the impact between swing leg and ground, a torque of square wave was applied at the hip as power supply. The gait sensitivity norm was used to quantify the stability, and the dimensionless cost of transport was used to quantify the walking efficiency. Stability, efficiency and velocity were used as three performance criteria. The effects of the amplitude of torque, the application time of torque and slope angle on the performance criteria were obtained by simulations. Since the torque does not do negative work during the whole walking period, the walker has a high efficiency as human walking. The robot can walk up a slope, walk down a slope and walk on flat ground.
Key words: quasi-passive dynamic walking; robot; stability; efficiency; velocity
McGeer[1]��1990������˱������е����ۣ���ͨ�������ʵ����֤�����������������Ƶı������л����˿�����б�������ȶ����ߡ� ���ݱ������е����ۣ�����ѧ�����ؽڻ����Źؽڴ������������������[2-3]�������˶�����ƽ�����ߵİ뱻�����л����ˡ�����������ص�켣�滮�������Ƶ���AsimoΪ�����Ĵ�ͳ��������ȣ��������л����˾��и��Ľṹ���ߵ�����Ч��[4-5]�����ұ������л����˵����߲�̬������Ȼ�����˵����߲�̬��������[6]�����ڰ뱻�����л����˲����ù켣�滮����ٵĿ��Ʒ�ʽ������Ʒ�����Ӱ����������ܵ���Ҫ���ء�Asano��[7]����һ�������ڴ��������е�����������������ʹ��������ƽ�ز��С�Goswami��[8]ͨ������ʩ�����Źؽں��ؽڵĿ������������ڻ����˵���������ʵ��ƽ�ز��к����²��С���������[9]���������б�����߷�������������ʵ����֤��Mao��[10]��������ѧϰ�ķ���ʵʱ����������أ�Liu��[11]�����������ٵķ�������������ء���Щ�뱻�����ߵĿ��Ʒ���������Ҫ�������˵�����״̬��������Ҫ��Ϊ���ӵ������㡣�����ಽ�е�������ѧ�о�����������ڰڶ�������Źؽ����ؽϴ�[12-13]��������غ�С���䲽����Ҫȡ���������Ĺ��Բ����������Ǹ�����ķ������ơ��Դ�Ϊ����ѧ���ݣ���������[14]���һ�����Źؽڴ�ʩ�Ӽ�ϵ�����������Ϊ��������Ŀ��Ʒ��������������ܹ��ȶ����ߵIJ�����Χ�����Ǹû����������õ��������أ�������ģ�����ಽ�������ص�ͻ�����ԣ���ֻ�������ܹ��ȶ����ߵIJ�����Χ����û���о����������ȶ��Ե����ܵ�Ӱ�졣��ˣ��������һ���ڰڶ�����ط�����ײ��ʼ�����Źؽڴ�ʩ�Ӽ�ϵķ���������Ϊ����������Ŀ��Ʒ������������˸������Ի������ȶ��ԡ�Ч�ʺͲ����ٶȵ����ܵ�Ӱ�졣
1 ����ѧģ������Ʒ���
1.1 ����ѧģ�͵Ľ���
����ͼ1��ʾ��2D���������л�����ģ�͡������Ⱦ�����ȫ��ͬ�Ĺ��Բ����ͼ��β������������ٶ�Ϊg��б�½Ƕ�Ϊ�ã��ã�0��ʾ�����������²��У���=0��ʾ������ƽ�ز��У��ã�0��ʾ�����������²��С���������Ϊm���ȳ�Ϊl��������ת������ΪI���������߷������Źؽڵ����ĵľ���Ϊc�����ĵ������ߵľ���Ϊw��w�ֱ���֮Ϊ����ƫ�ƣ�������ǰƫ��Ϊ�������ǰ뾶Ϊr��Բ�������Źؽڴ��е��ɸն�Ϊk��Ť�ɡ�֧���ȺͰڶ�����б�淨�����γɵļнǷֱ�Ϊ�Ⱥͦգ�������ʱ�뷽��Ϊ������ÿһ���������������Źؽڴ�ʩ�ӷ������أ�������֧���ȺͰڶ��ȵ����طֱ�U�ͣ�U��U�ı���ʽΪ��
![]() (1)
(1)
ʽ�У�UaΪʩ�����Źؽڴ����أ�tcΪ��ǰʱ�䣻ti�ϴη�����ײ��ʱ�䣻taΪ��1����������������Ua������ʱ�䡣
1���������ڿ��Է�Ϊ�ڶ����̺�����ص���ײ���̡�����ڶ�������֧���ȵ������֮��Ϊ����Ի����Ĵ�������������ײ����Ϊ��ȫ�ǵ�����ײ����ײ����˲����ɣ�ԭ֧������ײ�����˰ڶ��ȣ�ԭ�ڶ��ȱ����֧���ȡ�
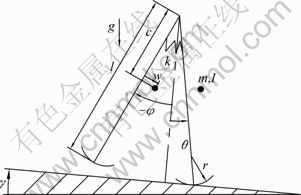
ͼ1 �뱻�����л�����ģ��
Fig.1 Sketch of model of quasi-passive dynamic walker
�����������շ��̣��ڶ����̵Ķ���ѧģ�ͽ������Ƶ����õ�������ʽΪ��
![]() (2)
(2)
ʽ�У�
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ��
��
������ײ���̣���ײǰ����ǶȲ������仯�����ǣ����ٶȷ���ͻ�䡣������ײǰ�������������˹�����ײ�㶯�����غ㼰��ײǰ��֧����(����ײ��İڶ���)�����Źؽڶ������غ㣬���Եõ���ײ����Ϊ��
![]() (3)
(3)
ʽ�У�q=[�ȣ���]T���ϱꡰ-�����ϱꡰ+���ֱ������ײǰ����ײ��ʱ�̣���Ϊ��ײʱ����֮��нǵ�һ�롣������ײǰ��ǶȲ������仯�����ǣ�֧������ڶ��ȷ����˻������У�
![]() (4)
(4)
ʽ(2)~(4)������һ�����IJ��з��̣�Ҳ��֮ΪPoincar��ӳ�䡣����Poincar������Ϊ��ײ���˲ʱ���ڴ˽����У���=-�ȡ���ˣ�״̬����������![]() ����Ϊ
����Ϊ![]() ������ǰ��Poincar�������״̬����ֵ����һ����ͬ����ƴ�״̬����ֵΪ�ý����1�������㡣����Newton-Raphson�������㣬�������ſ˱Ⱦ�������ֵģ���ж������˵��ȶ���[15]��
������ǰ��Poincar�������״̬����ֵ����һ����ͬ����ƴ�״̬����ֵΪ�ý����1�������㡣����Newton-Raphson�������㣬�������ſ˱Ⱦ�������ֵģ���ж������˵��ȶ���[15]��
ȡ�����˲�����g=
![]()
���ſ˱Ⱦ�������ֵģ�����ֵΪ0.679����ˣ���1���ȶ��ĵ������˶���
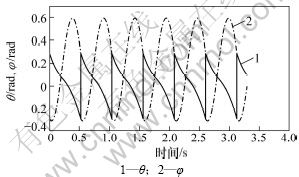
ͼ2 ��ֵ�������ðڶ��Ⱥ�֧���ȽǶ�����
Fig.2 Angles of swing leg and stance leg by numerical simution
Ϊ��֤��ֵ�������ȷ�ԣ�ʹ�ö���ѧ��������ADAMS������������������֤����ADAMS�ж������ȷֱ�Ϊ��1����2������1��б�淨�ߵļнǦ�1����2��б�淨�ߵļнǦ�2��ʱ��仯������ͼ3��ʾ������ֵ���治ͬ������ADAMS���������У�����ײ���̷�����û��֧������ڶ��ȵĽ�ɫת�����̡���ͼ2��ͼ3�Աȿ��Է������߲����С����֤����ֵ�������ȷ�ԡ�
1.2 ���Ʒ���
�����˵Ļ�е������������ɡ��Źؽڴ���װ1���ɽ������ؿ��Ƶ��ŷ�����ṩ�������룬����ײ�����װ1���Ӵ����أ����ڼ�������������ĽӴ�״̬�������˻�����1����ʱ�����ŷ�����Ĺ���ʱ����м�ʱ��1�����������ɼ����ĽӴ������źźͼ�ʱ���źŽ��з�����Ȼ�����ŷ�������Ϳ���ָ�
��ijһ�Ӵ�������ijһʱ���ɷǽӴ�״̬ת��Ϊ�Ӵ�״̬ʱ�������˿�Ϊ����ط�����ײʱ�̣�����ʱ�����㲢��ʼ��ʱ��ͬʱ����������ָ��ʹ�ŷ������������ĺ㶨���ء�����ʱ����ʱ��ﵽ�趨ֵʱ���ŷ����ֹͣ�������������ڹ��Ե������¼����˶�ֱ���ڶ�������淢����ײΪֹ����ײ���������˽������Ե��ظ�ǰ��IJ���ģʽ��
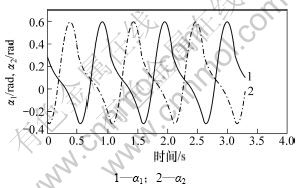
ͼ3 ADAMS���������������ȽǶ�����
Fig.3 Angles of both legs by simulation with ADAMS software
2 �����Ի��������ܵ�Ӱ���о�
���ȶ��ԡ�Ч�ʺͲ����ٶ���Ϊ��������������ָ��[16]����������Ua����������ʱ��ta��б�½ǶȦ� 3�������Ի��������ܵ�Ӱ�졣�ڷ���ijһ����Ӱ��ʱ�����������������䡣
���������ܹ�ʹ�������ȶ�������ȥ�����г�ʼ״̬�ļ��ϣ����㷺���ں�������������[15, 17]�����ǣ�������ļ���ʱ����������������ܹ��ܺõ������ȶ���[18]��
��Hobbelen��[18]����IJ�̬���з��� (The gait sensitivity norm)���������Ժܺõ������ȶ��ԣ����Ҽ���ʱ��̡ܶ�Hobbelen��Wisse��γɹ��ؽ���̬���з������ڼ��㱻�����л����˵��ȶ��ԣ���������ʵ����֤[16, 19]��
2.1 ��̬���з���
ͼ4�����������Ŷ�e�������ָ̬ʾT��ƫ�T֮��Ĺ�ϵ[18]����������Hobbelen[18]��������ȡeΪ������½��߶ȣ�TΪ�������ڣ���TΪT�����Ŷ�ʱ��������T*�IJ�±�n��n+1�ֱ������n���͵�n+1����![]() ��v*Ϊ����Newton-Raphson�������������IJ����㣬��vΪv��v*�IJ��Poincar��ӳ������϶�������Ŷ�e�Ͳ�ָ̬ʾT��ӳ��S��
��v*Ϊ����Newton-Raphson�������������IJ����㣬��vΪv��v*�IJ��Poincar��ӳ������϶�������Ŷ�e�Ͳ�ָ̬ʾT��ӳ��S��
![]() (5)
(5)
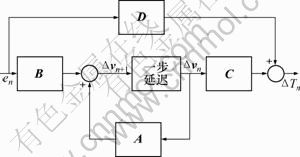
ͼ4 ��-��ϵͳ��ͼ[18]
Fig.4 Block diagram of step-to-step system
v*��T*Ϊ:
![]() (6)
(6)
��ͼ4��ʾ��ͼ��:
![]() (7)
(7)
ʽ�У�![]() ��Ϊ��n���Ħ�v���n+1���Ħ�vӳ��ľ����ſ˱Ⱦ���
��Ϊ��n���Ħ�v���n+1���Ħ�vӳ��ľ����ſ˱Ⱦ���![]() ��Ϊ��n����e���n+1���Ħ�vӳ��ľ���
��Ϊ��n����e���n+1���Ħ�vӳ��ľ���![]() ��Ϊ��n���Ħ�v���n���Ħ�Tӳ��ľ���
��Ϊ��n���Ħ�v���n���Ħ�Tӳ��ľ���![]() ��Ϊ��n����e���n���Ħ�Tӳ��ľ���
��Ϊ��n����e���n���Ħ�Tӳ��ľ���
���岽̬���з���Ϊ![]() ������
������![]() ��H2����������㹫ʽΪ��
��H2����������㹫ʽΪ��
![]() (8)
(8)
ʽ�У�trace(X)��ʾ����X���Խ�����Ԫ��֮�͡�
���������ٲ�̬���з����ĵ���![]() �����������˵��ȶ��ԡ������ٲ�̬���з����ĵ���Խ��ʾ�����Ŷ�e�������ָ̬ʾ��ƫ�T��Ӱ��ԽС���������ȶ���Խ�á������ᵽ�IJ�̬���з�����Ϊ�����ٻ�֮��IJ�̬���з�����
�����������˵��ȶ��ԡ������ٲ�̬���з����ĵ���Խ��ʾ�����Ŷ�e�������ָ̬ʾ��ƫ�T��Ӱ��ԽС���������ȶ���Խ�á������ᵽ�IJ�̬���з�����Ϊ�����ٻ�֮��IJ�̬���з�����
2.2 ��
Ϊ�˱Ƚϲ�ͬ���������˵IJ���Ч�ʣ����������ٲ����ܺ�cmΪ��λ�����Ļ����˲��е�λ���������ĵ�����[5]������㹫ʽΪ��
![]() (9)
(9)
ʽ�У�sΪ������WΪ����һ������U�����Ĺ�������㹫ʽΪ:
![]() (10)
(10)
������������ʱ��ȻҪ�����������ʶԹ���ȡ����ֵ�Ժ��ٻ��֡�
2.3 ���ضԻ��������ܵ�Ӱ���о�
����Ua���ȶ��Ե�Ӱ����ͼ5��ʾ����ͼ5�ɼ��������ؽ�Сʱ���������ص�����̬���з����ĵ����������˵��ȶ�����ߣ���������0.7 N?m����ʱ�������˵��ȶ��Դﵽ��˺��������ص��������˵��ȶ����½�����0.13��Ua��1.06 N?mʱ���������ܹ��ȶ����У��ڴ˷�Χ֮��ʱ�������˲��ܹ��ȶ����С�
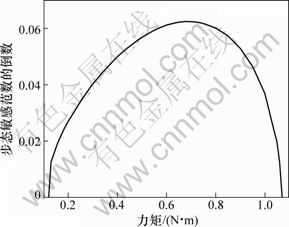
ͼ5 ���ض��ȶ��Ե�Ӱ��
Fig.5 Effect of amplitude of torque on stability
����Ua�������ٲ����ܺĵ�Ӱ����ͼ6��ʾ����ͼ6�ɼ����������ص����������ٲ����ܺ�����������������Χ��ʱ�������ٲ����ܺ������ಽ�к���������뱻�����л����˵��൱������AsimoС1~2��������[5]��˵���ð뱻�����л����˾��нϸߵIJ���Ч�ʡ�
��Ua=0.6 N?mʱ������U�Ĺ�����ʱ��仯��ͼ7��ʾ����ͼ7���Կ���������û������������ʹ�û����˾��кܸߵ�Ч�ʣ�����ͳ�ͻ�����Ϊ������켣���ٵ���Ҫ���ڲ��й����о�����Ҫ��������ʹ��Ч�ʵ��¡�
����Ua�Բ����ٶȵ�Ӱ����ͼ8��ʾ����ͼ8�ɼ����������ص��������˲����ٶ�Ҳ����
2.4 ��������ʱ��Ի��������ܵ�Ӱ���о�
��������ʱ��ta���ȶ��Ե�Ӱ����ͼ9��ʾ����ͼ9�ɼ�������������ʱ���Сʱ��������������ʱ�������̬���з����ĵ����������˵��ȶ�����ߣ�����������ʱ����0.20 s����ʱ�������˵��ȶ��Դﵽ��˺�������������ʱ����������˵��ȶ����½�����0.05��ta��0.29 sʱ���������ܹ��ȶ����У��ڴ˷�Χ֮��ʱ�������˲��ܹ��ȶ����С�
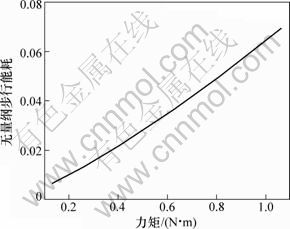
ͼ6 ���ض������ٲ����ܺĵ�Ӱ��
Fig.6 Effect of amplitude of torque on dimensionless cost of transport
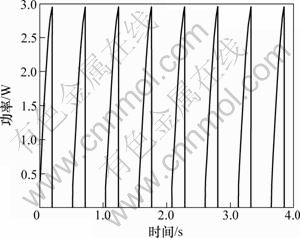
ͼ7 ������ʱ��m�ı仯
Fig.7 Variation of power with time
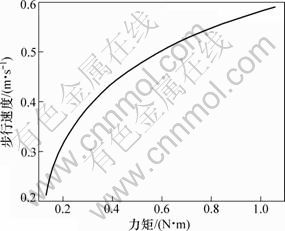
ͼ8 ���ضԲ����ٶȵ�Ӱ��
Fig.8 Effect of amplitude of torque on walking speed
��������ʱ��ta�������ٲ����ܺĵ�Ӱ����ͼ10��ʾ����ͼ10�ɼ���������������ʱ������������ٲ����ܺ�����
��������ʱ��ta�Բ����ٶȵ�Ӱ����ͼ11��ʾ����ͼ11�ɼ���������������ʱ����������˲����ٶ�Ҳ����
2.5 б�½ǶȶԻ��������ܵ�Ӱ���о�
б�½ǶȦö��ȶ��Ե�Ӱ����ͼ12��ʾ����ͼ12�ɼ�����б�½ǶȽ�Сʱ������б�½Ƕȵ�����̬���з����ĵ����������˵��ȶ�����ߣ���б�½Ƕ���0.04 rad����ʱ�������˵��ȶ��Դﵽ��˺�����б�½Ƕȵ��������˵��ȶ����½�����-0.012���ã�0.066 radʱ���������ܹ��ȶ����У��ڴ˷�Χ֮��ʱ�������˲��ܹ��ȶ����С���ˣ��û����˿�����һ����б�½Ƕȷ�Χ�����Ϻ����²��С�
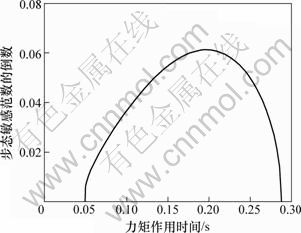
ͼ9 ��������ʱ����ȶ��Ե�Ӱ��
Fig.9 Effect of action time of torque on stability
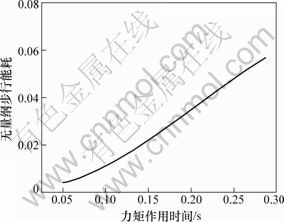
ͼ10 ��������ʱ��������ٲ����ܺĵ�Ӱ��
Fig.10 Effect of action time of torque on dimensionless cost of transport
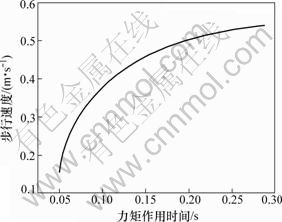
ͼ11 ��������ʱ��Բ����ٶȵ�Ӱ��
Fig.11 Effect of action time of torque on walking speed
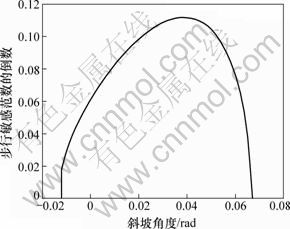
ͼ12 б�½Ƕȶ��ȶ��Ե�Ӱ��
Fig.12 Effect of slope angle on stability
б�½ǶȦö������ٲ����ܺĵ�Ӱ����ͼ13��ʾ����ͼ13�ɼ�����б�½ǶȽ�Сʱ������б�½Ƕȵ����������ٲ����ܺļ�С����б�½ǶȦã�0.04 radʱ�������ٲ����ܺļ������䡣����ʱ�������ܺ�С��ƽ�ز���ʱ�������ܺģ�ƽ�ز���ʱ�������ܺ�С������ʱ�������ܺġ���ͬ�ڴ�ͳ�����ˣ��û������ܹ������������������������ܡ�
б�½ǶȦöԲ����ٶȵ�Ӱ����ͼ14��ʾ����ͼ14�ɼ�������б�½Ƕȵ��������˲����ٶ�Ҳ ����
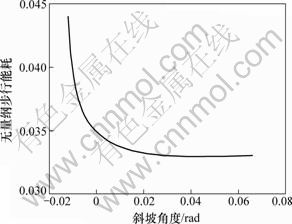
ͼ13 б�½Ƕȶ������ٲ����ܺĵ�Ӱ��
Fig.13 Effect of slope angle on dimensionless cost of transport
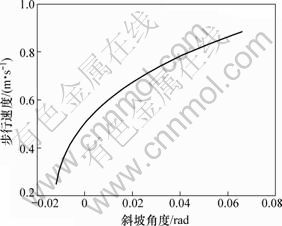
ͼ14 б�½ǶȶԲ����ٶȵ�Ӱ��
Fig.14 Effect of slope angle on walking speed
3 ���������صıȽ�
���½�������ķ��������븶������[14]������������ؽ��бȽϡ�
(1) ����������������ϥ�ؽڲ��л����ˣ�����������������ϥ�ؽڱ������л����ˡ������ص���ʼʱ�̾�Ϊ����ط�����ײ���˲�䣬�������������õĽ���ʱ���ɼ�ʱ�����ƣ������������õĽ���ʱ��Ϊ�ڶ��ȵ�ϥ�ؽ���ײʱ�̡���ˣ��������غ�������չ����ϥ�ؽڲ��л������ϣ�����������������չ����ϥ�ؽڲ��л������ϣ�����Ҫ���¶������صĽ���ʱ�̡���ˣ�û�н��������ص������뷽�����ص����ܽ��бȽϣ����������������ಽ��ʱ��ͻ�����ظ������ơ�
(2) ͨ���Բ����ĵ���2�ַ���������ʵ�ֶԲ����Ͳ��ٵĵ��ڣ��������ؿɵ�������4�������Ե��ڵIJ����϶࣬�ɵ���Χ�����ڽϸ��ӣ����������ؿɵ�������2�������Ե��ڵIJ������٣��ɵ���ΧС�����ϼ�
4 ����
(1) �����ಽ�е�������ѧ�о��õ����������һ�ְ뱻��˫�㲽�л����˵Ŀ��Ʒ�����ʹ�øÿ��Ʒ����Ļ����˾��������ಽ���൱�IJ���Ч�ʣ��ҿ��������¡����º�ƽ�ز��У��������²���ʱ���ܹ�����б�����������������ܡ�
(2) ��������0.7 N?m����ʱ�������˵��ȶ��Դﵽ����������ص����������ٲ����ܺ��������ٶ�����
(3) ����������ʱ����0.2 s����ʱ�������˵��ȶ��Դﵽ���������������ʱ������������ٲ����ܺ��������ٶ�����
(4) ��б�½Ƕ���0.04 rad����ʱ�������˵��ȶ��Դﵽ�������б�½Ƕȵ����������ٲ����ܺļ�С�������ٶ�����
�ο����ף�
[1] McGeer T. Passive dynamic walking[J]. International Journal of Robotics Research, 1990, 9(2): 62-82.
[2] Collins S H, Ruina A. A bipedal walking robot with efficient and human-like gait[C]//Proceedings of 2005 IEEE International Conference on Robotics and Automation.
[3] Tedrake R, Zhang T W, Fong M F, et al. Actuating a simple 3D passive dynamic walker[C]//Proceedings of 2004 IEEE International Conference on Robotics and Automation.
[4] Alexander R M. Walking made simple[J]. Science, 2005, 308(5718): 58-59.
[5] Collins S, Ruina A, Tedrake R, et al. Efficient bipedal robots based on passive-dynamic walkers[J]. Science, 2005, 307(5712): 1082-1085.
[6] Garcia M, Chatterjee A, Ruina A. Speed, efficiency, and stability of small-slope 2-D passive dynamic bipedal walking[C]// Proceedings of the 1998 IEEE International Conference on Robotics and Automation. Part 3 (of 4).
[7] Asano F, Yamakita M, Kamamichi N, et al. A novel gait generation for biped walking robots based on mechanical energy constraint[J]. IEEE Transactions on Robotic and Automation, 2004, 20(3): 565-573.
[8] Goswami A, Espiau B, Keramane A. Limit cycles in a passive compass gait biped and passivity-mimicking control laws[J]. Autonomous Robots, 1997, 4(3): 273-286.
[9] ������, ������, ����Ң. ƽ��˫�����������б�����߲�̬�����㷨�о�[J]. ������, 2009, 31(1): 77-81.
LI Li-guo, ZHAO Ming-guo, ZHANG Nai-yao. Research on virtual slope walking gait generation algorithm for planar biped robot[J]. Robot, 2009, 31(1): 77-81.
[10] Mao Y, Wang J, Jia P, et al. A reinforcement learning based dynamic walking control[C]//Proceedings of 2007 IEEE International Conference on Robotics and Automation.
[11] Liu Z, Tian Y. Some control strategy on the compass gait biped[C]//Proceedings of IMACS Multiconference on "Computational Engineering in Systems Applications".
[12] Winter D A. The biomechanics and motor control of human movement[M]. 2nd ed.
[13] Goswami A, Thuilot B, Espiau B. A study of the passive gait of a compass-like biped robot: Symmetry and chaos[J]. Int J Robot Res, 1998, 17(12): 1282-1301.
[14] ������, ��Ԫ��, ������, ��. �뱻��˫������˵���������[J]. ������, 2009, 31(2): 110-117.
FU Cheng-long, HUANG Yuan-lin, WANG Jian-mei, et al. Quasi open-loop control for semi-passive biped robots[J]. Robot, 2009, 31(2): 110-117.
[15] Liu N, Li J F, Wang T S. The effects of parameter variation on the gaits of passive walking models: Simulations and experiments[J]. Robotica, 2009, 27: 511-528.
[16] Hobbelen D G E, Wisse M. Controlling the walking speed in limit cycle walking[J]. International Journal of Robotics Research, 2008, 27(9): 989-1005.
[17] Schwab A L,
[18] Hobbelen D G E, Wisse M. A disturbance rejection measure for limit cycle walkers: The gait sensitivity norm[J]. IEEE Transactions Robot, 2007, 23(6): 1213-1224.
[19] Hobbelen D G E, Wisse M. Swing-leg retraction for limit cycle walkers improves disturbance rejection[J]. IEEE Transactions Robot, 2008, 24(2): 377-389.
(�༭ �°���)
�ո����ڣ�2010-04-04�������ڣ�2010-06-22
������Ŀ��������Ȼ��ѧ����������Ŀ(59705011)
ͨ�����ߣ�����(1980-)���У������Ž��ˣ���ʿ�о��������·����������о����绰��13651830703��E-mail��nixiuhua@gmail.com
