
�ƶ����ߴ����������µIJ�ú����λ����
�����������������ߣ����ϱ������������
(�й���ҵ��ѧ ���繤��ѧԺ������ ���ݣ�221116)
ժ Ҫ��
ǿ�Ⱥ;������ģ�ͣ���������ǿ�ź��붨λ�ӿռ�Ķ�żӳ�䣬�ڴ˻������Ƶ������������ê�ڵ�������չ������-�������̡������о����߲����ê�ڵ��ܶȺ�ê�ڵ������Ư�Ʒ���ȶ����ضԲ�ú����λ���ȵ�Ӱ�죬����ʵ��������ģ���Ͻ��в��ԡ�ʵ���������������߲���������IJ�ú����λ���ռ��92.9%�����ز�ú���ظ��������ռ78.11%���ϣ���ͨ������ê�ڵ��ܶ��Լ������ƶ��ڵ���ê�ڵ�䴹ֱ�����ܼ��ٶ�λ��ʵ���������������һ�¡��о������Ϊ�ƶ������������²�ú����ȷ��λ�ṩ�����뼼��֧�š�
�ؼ��ʣ�
�۲ɹ���������ú�������ߴ�������������λ��������ȷ��ê�ڵ���
��ͼ����ţ�TN92 ���ױ�־�룺A ���±�ţ�1672-7207(2014)02-0428-07
Positioning accuracy of shearer in mobile wireless sensor networks
LUO Chengming, LI Wei, FAN Qigao, FAN Mengbao,YANG Hai, WANG Pengpeng
(School of Mechatronic Engineering, China University of Mining & Technology, Xuzhou 221116, China)
Abstract: Duality mapping between local strong signal set and positioning spatial domain were established by analyzing received signal strength and distance solver model. The improved Cramer-Rao lower bound formula was derived. The effects of wireless range error, anchor nodes density and the error drift direction of anchor node reference coordinate on positioning accuracy were simulated. Shearer positioning precision under mining fleet model was preceded in laboratory. Experiment results indicate that 92.9% of positioning error is caused by low ranging accuracy, while the positioning error along the shearer cutting direction accounts for 78.11%. Furthermore, increasing the anchor node density and decreasing the vertical distance between mobile node and anchor nodes can improve positioning accuracy. The practical monitoring results are similar to the simulation ones. So, shearer positioning using wireless sensor networks can be applied for mechanized mining faces under mobile wireless sensor networks.
Key words: mechanized mining face; shearer; wireless sensor networks; positioning accuracy; uncertain anchor nodes
�۲ɹ�������ú��������������֮һ���ɲ�ú�����ΰ����ͻ���Һѹ֧����ɵ��������۲ɹ�������IJɿ��豸[1]�������Զ����У���ú̿��Ч��ȫ���ɵĹؼ�����Ҫ����豸Эͬ���е��������[2]����������Ҫ��������֮һ�Dz�ú�����۲ɹ�����Ķ�λ����ú����ȷ��̬��λϵͳ�ܹ�ʵ�ֲ�ú����Һѹ֧����ΰ������֮���������������Ϊ��ú���ļ���ظ����Ӧ�õ춨���������ھ��¹�����װ���Զ���������Ҫ����[3]����ú����λ�����ó��ּ�������������䷨�Լ��������ȷ��������Ǵ����ۼ�������������ȱ�㡣��ǰ�����������ߴ��������磬�ɿ��豸״̬��⡢��ɽ��Ա���߶�λ���Ѿ���úܺõ�Ӧ�ã����ǣ���û�������о����ߴ����������²�ú���Ķ�λ[4]���ڴ�������ߴ��������綨λӦ���У�ê�ڵ�λ�ù̶�������������ͨ���˹��������GPS�Ѿ���ȷ�궨[5-6]�����ڲ�ú�����ߴ��������綨λ�У���ú���ظ�ú��ʱ�ƶ��ڵ�λ�÷����仯��Һѹ֧����ú�ڷ����ƶ�ʹ������ȷ�궨��ê�ڵ��ʼ���귢��Ư�ƣ���ˣ��ƶ��ڵ��ê�ڵ���˶�ʹ��ú�����ߴ�������������ƶ��ԡ����������ڲ�ú�����ߴ����������ƶ���ʹê�ڵ�����������Ӱ���ú�����ƶ��ڵ�Ķ�λ���ȡ��о����Ƕ����ƶ����ߴ���������������ê�ڵ�Ư�����ƶ�Ŀ��Ķ�λ���Ƚ������о�[7-8]��Easton��[9]���þ������߶�λ�����ھ��и�˹����ê�ڵ��½���ʵ����ԣ��о�Ŀ��ڵ�Ķ�λ���ȣ�Funke��[10]��ê�ڵ�����λ������½��е���·��Э����о���Le��[11]�о�����У���������о�ê�ڵ���г�ʼ�����Ŀ��Ķ�λ���ȣ�Lui��[12]���øĽ��İ붨�滮�㷨����ê�ڵ�����¶�λ�����о������봫ͳ�İ붨�滮�㷨�Ϳ�����-�����㷨�������ܱȽϡ������о�ֻ�������߶�λ�Ⱦ����������˽ṹ��̽�ֵģ�û���漰�������߲������Լ�ê�ڵ�����ƫ�Ƶȶ������¶�λ���ȱ仯���ɣ�������ê�ڵ���ά��������ϻ����Բ�ú����λ�����Ӱ����Ʋ�û����ȫ��ʾ����ˣ��������ʽ�������˽ṹ���о���λ�ο�������붨λ��������ϵ��Ҫ�����о���
1 ��ú����λ��֪ģ��
1.1 ��λ��֪����
��ú�����ߴ��������綨λģ�ͣ�
MLocation=<>LN��SDRSS��fEALG> (1)
ʽ�У�SLN��λ�е����߽ڵ㣻�ƶ��ڵ��0={x0��y0��z0}��ê�ڵ����꼯Ϊm={x��y��z}��x ={x1��x2������xn}��y={y1��y2������yn}��z={z1��z2������zn}��SDRSSΪ�ڵ���ź�ǿ�� ӳ���µľ��룻fEALGΪ��ú����λ�����õķ���[13]��
ӳ���µľ��룻fEALGΪ��ú����λ�����õķ���[13]��
��ú�����ߴ����������֪������ͼ1��ʾ��Һѹ֧���ϲ���ê�ڵ㣬Һѹ֧��ʵ�б�Ź���������ú���ϲ����ƶ��ڵ㡣ê�ڵ�̶�����ΰ����ͻ��ײ������ƶ��ڵ�̶�����Һѹ֧�ܵײ�����
1.2 ê�ڵ�����궨
���۲ɹ������У����ڲ�ú�����˶���������ƽ�ʹ������������ƶ���ʽ�����˽ṹ�������е�j�νظ�ѭ��ʱ�����ڹΰ����ͻ��ƽ������»��ϴܵ���Һѹ֧�ܵ�б��ʹ��װ��Һѹ֧����ê�ڵ�������������λ�����ʼ�궨λ�÷���ƫ�ƣ���ͬʱú�����һ����ǣ�ʹê�ڵ�ĸ߶��������ʼ�궨λ�÷���ƫ�ơ�ê�ڵ��iʵ����ά������ͼ2��ʾ���ɱ�ʾΪ
 (2)
(2)
ʽ�У�dHΪ��Һѹ֧�ܼ�����ļ�࣬i={1,2������n}ΪҺѹ֧�ܱ�ţ�exiΪê�ڵ��ع�����ظ��Ļ���hΪ�ƶ��ڵ���ê�ڵ�Ĵ�ֱ���룻j={1��2������m} Ϊ��ú����j�νظ�ѭ����eyiΪê�ڵ��ع������ƽ�����Ļ���z0ΪҺѹ֧����ê�ڵ���װ�ĸ߶ȣ�eziΪê�ڵ�ú���ȷ���Ļ���
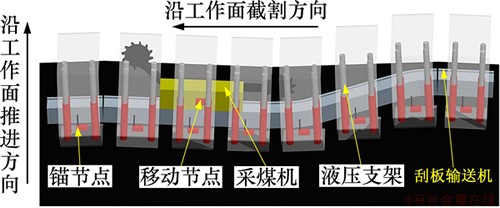
ͼ1 ���ߴ������ڵ���������ʾ��ͼ
Fig. 1 Wireless sensor nodes deployed on mining fleet
���ڲ�ú��ÿ�νظ�ѭ�����Ƕ����Ĺ��̣�����ά���귽���ϻ����Ϊ����ֲ����ڴ˼ٶ�ê�ڵ�Ļ����Ϊ���� �ĸ�˹�ֲ���
�ĸ�˹�ֲ���
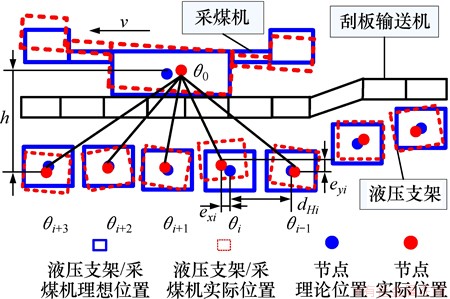
ͼ2 ��ȷ��ê�ڵ�ʾ��ͼ
Fig. 2 Uncertain anchor nodes
1.3 �����ź�ǿ�ȵľ������
ê�ڵ����������¶���ƶ��ڵ���ź�ǿ��RSSI(received signal strength indicator)Ϊ[14]
 (3)
(3)
ʽ�У�Pi0Ϊ���չ��ʣ�dBm��di0Ϊê�ڵ�i���ƶ��ڵ��ľ��룻PrefΪdref���Ľ��չ��ʣ�dBm��nPΪ·�����ָ����
1.4 ����RSSI������ּ�ģ��
��ú�����ƶ��ڵ���ͨ�ž���R�ڣ�����յ����Զ��ê�ڵ���ź�ǿ�ȣ����ź�ǿ�Ȳ��ȣ��ƶ�Ŀ���յ����ڽ�ê�ڵ���ź�ǿ��Ϊ��ǿ����Զ��ê�ڵ��ź�ǿ���������Ҵ������صĶྶ����[15]����ˣ������ֳ�ʵ�ʲ�����SRSSI�����������Ϊ3���ȼ����ɱ�ʾΪ
 (4)
(4)
ʽ�У���dΪ������Ƶ�������mΪ�̾���ͨ���²������uΪ�ྶ�ܼ������²����
ͼ3��ʾΪ��5 m��ͨ�ž��������߽ڵ��IJ������ͼ3�ɼ���0��di0��5.0 mʱ��SRSSI�ܹ��ܺõı�����Ӧ�ľ��룬ʵ�־�ȷ��ࡣ
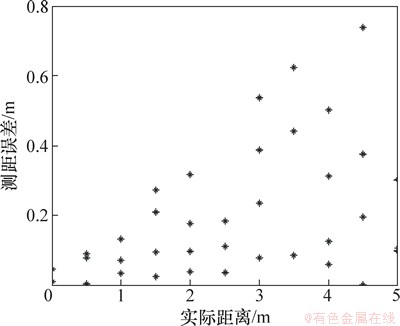
ͼ3 ������ͼ
Fig. 3 Ranging error
����5.0��di0��30 mʱ������SRSSI�ܽϴ���Ŷ�����ȷ��࣬��ˣ�Ϊ��߲�ú����λ���ȣ���ѡȡ�ƶ��ڵ���Чͨ�Ű뾶Re(0��di0��5.0 m)��Χ��ê�ڵ���붨λ��
�ڶ�λ��Чͨ�Ű뾶�ڣ�ê�ڵ����ĿnΪ
 (5)
(5)
ʽ�У�int(��)Ϊ����ȡ��������
2 ��ú����λ����
2.1 ���������ϻ������ʷֲ�
����Чͨ�Ű뾶Re�ڽڵ��SRSSI�����ڹ۲����������������ê�ڵ�����Ϊ����
 (6)
(6)
ʽ�У� ��
��
��ˣ�Pi0�����ܶ�Ϊ

 (7)
(7)
ʽ�У� ��
��
����ȡ�������ɵ�
 (8)
(8)
2.2 ��ȷ��ê�ڵ�����չCRLB��λ����
ECRLBΪ�ƶ��ڵ������0��ƫ�������ṩ�����½磬����Ա�ʾΪ [16]��
[16]��
 (9)
(9)
ʽ�У�
 ��
��
 ��
��
 ��
��
��ˣ���������Ĺ���Ϊ
 (10)
(10)
��δ֪�ڵ�Ĺ���Ϊ


 (11)
(11)
��ʽ(10)����ʽ(11)���ɵ�
 (12)
(12)
ͨ��ʽ(12)���Խ����ƶ����ߴ����������²�ú����λ���ȵķ�����
3 ��������
������ͨCC2430�;��ж�λ���������CC2431��RSSI�źŽ��ж�λ�����о�������Ƶ��Ϊ2.45 GHz��ͨ�ŷ�Χ�ڽ��չ��ʷֱ���Ϊ0.5 dBm���������ӳ�䵽�ź�ǿ�ȵ�ϵ��Ϊ0.3���ڵ�ͨ�Ű뾶RΪ30 m����λ��Чͨ�Ű뾶ReΪ5 m����Ӧ���չ��ʾ������dBΪ1 dB�����սڵ�ο�����dref=1 000 mm��·�����ָ��nPΪ3���ο������µĽ��չ���PrefΪ42.5 dBm��ͨ�ŷ�Χ�ڽ��չ���Ϊ40~95 dBm����Matlab�н��в����仯�²�ú����λ���ȷ����������Ϊ��
��ú���ƶ��ٶ�Ϊ1 m/s����ú������Ϊ600~1 000 mm����ê�ڵ����ƶ��ڵ㴹ֱ����hΪ600~1 000 mm����ǰ�ظ�ѭ��jΪ2����Һѹ֧�����ļ��dHΪ1 500 mm��ú����б�ǶȦ�Ϊ��10�㣬ê�ڵ����Һѹ֧�ܵ����ľ���z0Ϊ100 mm�����ƶ��ڵ����ΰ����ͻ������ľ���z1Ϊ1 200 mm��
���������ڹ�����λ��Լ����ϵ����������ê�ڵ㣬����������exiΪ[-100��100] mm�����������eyiΪ[-60��60] mm���߶��������eziΪ[-40��40] mm��
3.1 ��dB���Ϧ�r�¶�λ���ȹ���
��ͼ4�пɼ������ڲ�ú�����ߴ��������綨λΪ��ͬê�ڵ����ƶ��ڵ���ź�ǿ��ʵ�ֵģ��ڶ�λ�ռ������ۼ�������ê�ڵ����ƶ��ڵ������ӣ����Ӷ�λ����ˣ��ڽڵ㲿��ʱӦ�þ�������ê�ڵ����ƶ��ڵ��Ĵ�ֱ���룻��ú�����߶�λ�����Ҫ�����ڲ���������ģ�������ê�ڵ����������ʹ��λ�������Լ7.1%��
ͼ4��ʾΪ�������ź��������ú���˶�����Ӧê�ڵ���ǰ��������С�Ķ�λ���������ڲ�����ʱ����ú�����е���ê�ڵ�䶨λ�����С��
3.2 ê�ڵ��ܶ��¶�λ����
��ͼ5�пɼ�����ê�ڵ�������4��5��6���ӵ�7ʱ����ú����λ������١���ê�ڵ�����������������£�����ê�ڵ��������Ȼ�ܹ���߲�ú���Ķ�λ���ȡ���Ϊê�ڵ��������DZ�����һ��С��Χ�ڣ��������ƶ��ڵ㶨λ��Чͨ�Ű뾶�ڵ�ê�ڵ��������С����ˣ��ڶ�λ��Чͨ�Ű뾶������ê�ڵ��������ܹ���߲�ú����λ���ȡ�
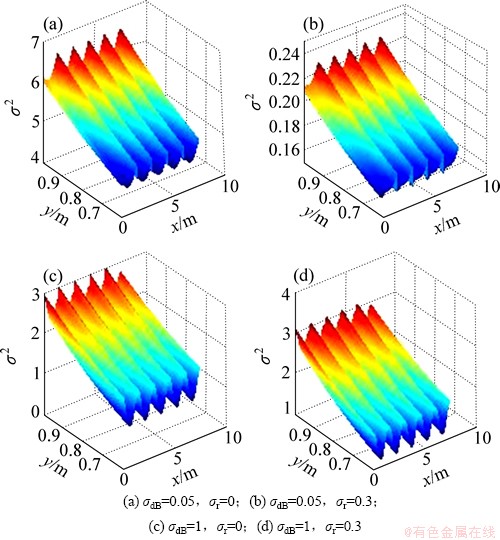
ͼ4 ��ͬ��dB�ͦ�rʱ�Ħ�2����
Fig. 4 ��2 estimation under different ��dB and ��r
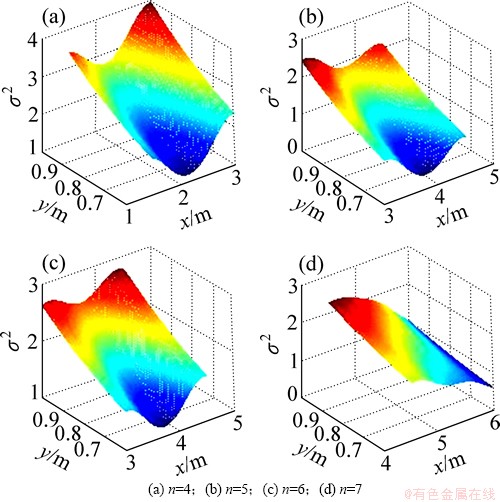
ͼ5 ê�ڵ������仯ʱ�Ħ�2����
Fig. 5 ��2 estimation under different node numbers n
���ڲ�ú�����߶�λ���ۼ�����ˣ�Ϊ�������ر��ַ�����������ͼ�ξ�ѡȡ�ز�ú���ظ��[3.0��4.5]��С��������ʾʵ������
3.3 ê�ڵ���������Ư���¶�λ����
�۲ɹ�������ƽ�ʹ��ê�ڵ�Ļ����귢��Ư�ƣ�����������Эͬ�˶�ʹ��ê�ڵ�Ư����һ����Χ�ڣ���ˣ���Ҫ�о�ê�ڵ���������Ư���²�ú����λ���ȡ�
��ͼ6��ͼ7�ɼ�����ê�ڵ�����������������ʱ�����ú����λ�����[0.79��2.77]����ͼ4��ȼ���10.5%������ê�ڵ���������������ʱ�����ú����λ�����[1.44��3.72]����ͼ4�������47.7%����ˣ��������źŴ��ڲ������ǰ���£�ê�ڵ������������ܹ��������ֲ������в����IJ�����Ӷ���߶�λ���ȣ���֮��Ȼ����ˣ�ê�ڵ����������������߸�����������Ư�Ʒ���Բ�ú�����߶�λӰ�첻�ܽ��м��ԡ�
��ͼ6��ͼ7�ɼ�������ά����x��y��z�ϵ��������ֱ�Ϊ83.63%��5.93%��10.45%��78.11%��7.49%��14.00%��˵�����ز�ú���ظ���������
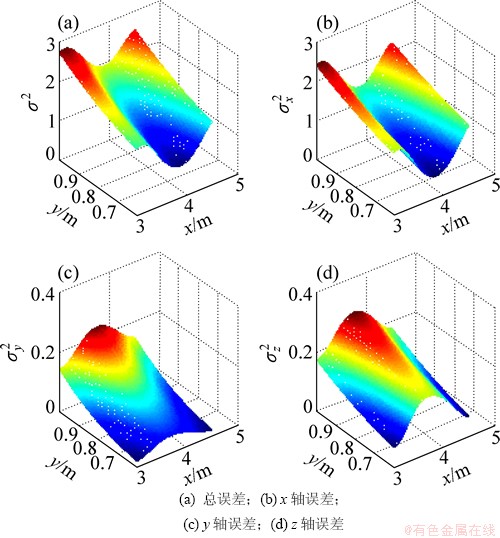
ͼ6 ê�ڵ�������������� ��d�ͦ�mʱ�Ħ�2����
Fig. 6 ��2 estimation under the max{exi, eyi, ezi} and ��d, ��m
��ͼ8�ɼ�����ê�ڵ����ά��������Ϊ(0��-60��-40) mm��(0��-60��+40) mm��(0��+60��-40) mm��(0��+60��+40) mm�����Ӧ�ز�ú���ظ���ϵĶ�λ���ݼ���˵������ê�ڵ�����ά�����ϴ������������ع����ƽ�����ƫ�ƣ��䶨λ�����١���ˣ��ڽ���ê�ڵ��ʼ�궨ʱ������ʹ�����һ����ʼ����
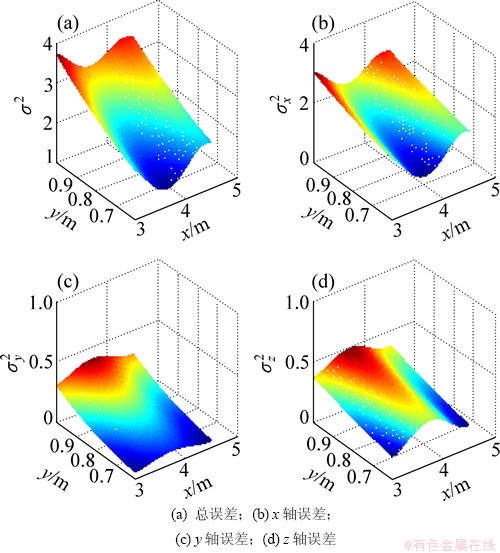
ͼ7 ê�ڵ�����������Ϧ�d�ͦ�mʱ�Ħ�2����
Fig. 7 ��2 estimation under the min{exi, eyi, ezi} and ��d, ��m
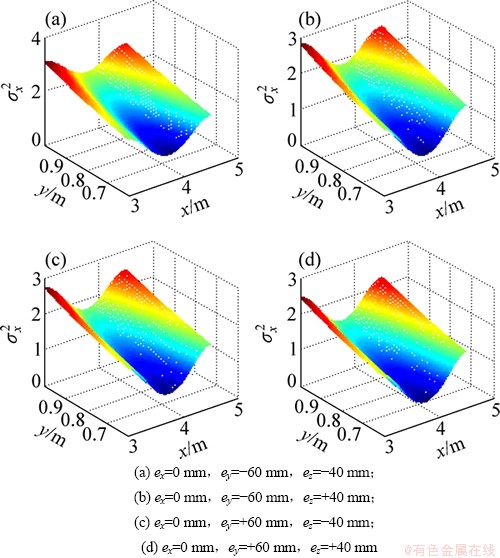
ͼ8 eyi��ezi�ͦ�d����m�� ����
����
Fig. 8 estimation under eyi, ezi and ��d, ��m
4 ʵ���Ҷ�λ����
��ʵ��������ģ��Ϊ����ƽ̨�����������������߽ڵ���Ϊ���Խڵ㣬��2��5�Ÿɵ�ع��磬����CC2431��Ϊ�ƶ��ڵ㲼���ڲ�ú���ϣ�CC2430��Ϊê�ڵ㲼����Һѹ֧���ϣ���CC2430ͨ���������վ�ʼDZ�����ֱ��������
��ú���ƶ��ٶ�Ϊ1 m/s���ƶ��ڵ���ê�ڵ�䴹ֱ����hΪ400 mm���ƶ��ڵ����ΰ����ͻ��ײ�����z1Ϊ600 mm����ê�ڵ��ˮƽ����dHΪ1 200 mm��ê�ڵ���װ����z0Ϊ(15��0��15��0��0��0) mm�����������exiΪ[-100��100] mm�����������eyiΪ[-50��50] mm���߶��������eziΪ0 mm����λ��Чͨ�Ű뾶ReΪ5 m�����Ӧ���չ��ʾ������dBΪ1 dB�����������ο���λ�������������ʵ�����ƶ����ߴ����������²�ú����λ���Ȳ��Գ���ͼ��ͼ9��ʾ��
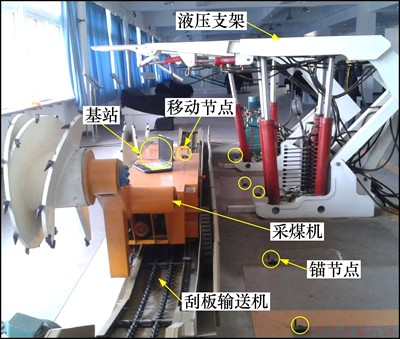
ͼ9 ʵ���һ������Գ���ʾ��ͼ
Fig. 9 Monitoring scene of practical application
��ͼ10�ɼ���������ʵ���Ҳ���������ģ�ͳߴ����С��ʹ��ê�ڵ����ƶ��ڵ��ͨ�ž�����٣��Ӷ��������ڲ������е�����߲�ú����λ���ȣ����ڶ�λ���������ۼ�����֤��ͼ4��ʾ������������ê�ڵ���Ϊ1 200 mm�������ê�ڵ��ܶȣ�ͬ����������߲�ú����λ���ȣ���֤��ͼ5���ַ���������ê�ڵ�������ֻ������Ϊ(+100��+50��0) mmʱ���븺���(-100��-50��0) mm�Ƚϣ���λ������25%����֤��ͼ6��ͼ7���ַ���������ê�ڵ�����Ϊ(-100��+50��0) mmʱ����(-100��-50��0) mm�Ƚϣ���λ������23%����ê�ڵ�����Ϊ(+100��+50��0) mm��(-100��-50��0) mmʱ��λ���ͬ������26%��˵����ê�ڵ�߶����������ز�ú���ظ������ex��ͬʱ���ع������ƽ�����ê�ڵ�����������ϸ����ʹ��ú����λ���ȸߣ���֤��ͼ8���ַ���������ˣ���ʵ��������ģ�������IJ��Խ��������������ƻ�������һ�¡�
����ѡȡͨ�ž���Ϊ5 m�ڵĽڵ���ж�λ����ýϺõĶ�λ���ȣ��ʵ�����ͨ�ž�������Ӷ�λ����ˣ������۲ɹ������ú�����߶�λ����������ê�ڵ���ܶȣ������Ӷ�λ�ڵ����Ŀ��
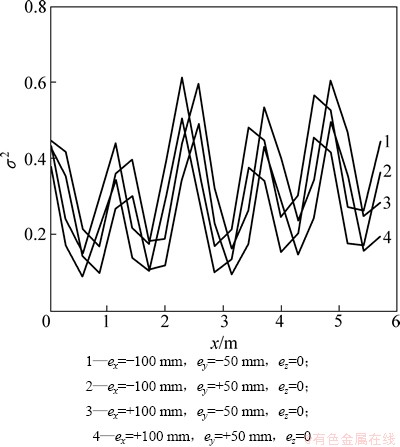
ͼ10 ʵ���һ����²�ú����λ����
Fig. 10 Shearer positioning precision in real environment
5 ����
(1) ��ú�����ߴ���������Ϊ�ֲ�ʽ��λ��֪��ʽ����λ�ۼ�����ê�ڵ�������ȣ����߲���������92.9%�Ķ�λ�������ز�ú���ظ��λ������Ϊ78.11%���ϡ�
(2) �����ƶ��ڵ���ê�ڵ��Ĵ�ֱ�����Լ��ڶ�λ��Чͨ�ŷ�Χ������ê�ڵ���Ŀ���ܼ�С��λ��ê�ڵ��������������߶�λ���ȣ��������ȴ���Ͷ�λ���ȡ�
(3) ����TDOA����AOA��������ȷ��ʽ������߲�ú����λ�����ǽ����о����ݡ�
�ο����ף�
[1] WANG Guimei, JIAO Shanlin, CHENG Guangxing. Fully mechanized coal mining technology for thin coal seam under complicated geological conditions[J]. Energy Exploration and Exploitation, 2011, 29(2): 169-177.
[2] ������, ���Ƽ�, ������, ��. �������ֿ�ɽ-�������������Ͽ�ɽ��ȫ�����ܲɿ�[J]. ú̿ѧ��, 2012, 37(3): 357-365.
WU Lixin, WANG Yunjia, DING Enjie, et al. Thirdly study on digital mine: Serve for mine safety and intellimine with support from IoT[J]. Journal of China Coal Society, 2012, 37(3): 357-365.
[3] ������, ����, ������, ��. һ�ֲ��û�ɫ�����Ʒ����ģ�͵IJ�ú������ظ��㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(10): 3054-3058.
FAN Qigao, LI Wei, WANG Yuqiao, et al. An algorithm of shearer memory cutting based on grey Markovian model[J]. Journal of Central South University (Science And Technology), 2011, 42(10): 3054-3058.
[4] Chehri A, Fortier P, Tardif P M. UWB-based sensor networks for localization in mining environments[J]. Ad Hoc Networks, 2009, 7(5): 987-1000.
[5] ������, ��־��, ���컪, ��. �����ߴ������������ζ�λ����[J]. �й���ҵ��ѧѧ��, 2010, 39(1): 87-92.
PEI Zhongmin, DENG Zhidong, WU Tianhua, et al. A novel three-phase localization method in coal mine wireless sensor networks[J]. Journal of China University of Mining and Technology, 2010, 39(1): 87-92.
[6] Patwari N, Ash J N, Kyperountas S, et al. Locating the nodes cooperative localization in wireless sensor networks[J]. IEEE Signal Processing Magazine, 2005, 22(44): 54-69.
[7] Sun M, Ho K C. Refining inaccurate sensor positions using target at unknown location[J]. Signal Processing, 2012, 92(9): 2097-2104.
[8] LI Wenling, JIA Yingmin. Location of mobile station with maneuvers using an IMM-based cubature kalman filter[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4338-4348.
[9] Easton A, Cameron S A. Gaussian error model for triangulation based pose estimation using noisy landmarks[C]//IEEE International Conference on Robotics Automation and Mechatronics. Bangkok, Thailand: IEEE Press, 2006: 1-6.
[10] Funke S, Milosavljevic N. Guaranteed-delivery geographic routing under uncertain node locations[C]//IEEE International Conference on Computer Communications. Alaska, USA: IEEE Press, 2007: 1244-1252.
[11] LE Yang, Ho K C. Alleviating sensor position error in source localization using calibration emitters at inaccurate locations[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 67-83.
[12] Lui K W K, Ma W K, Chan F K W. Semi-Definite programming algorithms for sensor network node localization with uncertainties in anchor positions and or propagation speed[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 752-763.
[13] �¹���, ����, ����. ��ʽ���ߴ����������ƶ�Ŀ���ԪЭͬ��֪����[J]. �����DZ�ѧ��, 2011, 32(6): 1225-1231.
CHEN Guangzhu, LUO Chengming, ZHANG Lei. Duality cooperative sense strategy of moving target for chain-type wireless sensor networks[J]. Chinese Journal of Scientific Instrument, 2011, 32(6): 1225-1231.
[14] Meguerdichian S, Koushanfar F, Qu G, et al. Exposure in wireless Ad-hoc sensor networks[C]//Proceedings of the 7th Annual International Conference on Mobile Computing and Networking. Rome, Italy: ACM, 2001: 139-150.
[15] ����, �ν�, ��ǰ��, ��. ������ּ�������TOA��λ�㷨[J]. �����DZ�ѧ��, 2011, 32(12): 2851-2856.
WANG Qin, HE Jie, ZHANG Qianxiong, et al. Ranging error classification based indoor TOA localization algorithm[J]. Chinese Journal of Scientific Instrument, 2011, 32(12): 2851-2856.
[16] Catovic A. The Cramer-Rao bounds of hybrid TOA/RSS and TDOA/RSS location estimation schemes[J]. IEEE Communications Letters, 2004, 8(10):626-628.
(�༭ ������)
�ո����ڣ�2013-01-26�������ڣ�2013-03-11
������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)������Ŀ(2013AA06A411)������ʡ�о����������¹���(CXZZ12_0925)
ͨ�����ߣ�����(1986-)���У����ճ����ˣ���ʿ�о��������²�ú�����߶�λ������о����绰��15862180476��E-mail��cumtlcm@163.com
ժҪ�����ڽڵ���ź�ǿ�Ⱥ;������ģ�ͣ���������ǿ�ź��붨λ�ӿռ�Ķ�żӳ�䣬�ڴ˻������Ƶ������������ê�ڵ�������չ������-�������̡������о����߲����ê�ڵ��ܶȺ�ê�ڵ������Ư�Ʒ���ȶ����ضԲ�ú����λ���ȵ�Ӱ�죬����ʵ��������ģ���Ͻ��в��ԡ�ʵ���������������߲���������IJ�ú����λ���ռ��92.9%�����ز�ú���ظ��������ռ78.11%���ϣ���ͨ������ê�ڵ��ܶ��Լ������ƶ��ڵ���ê�ڵ�䴹ֱ�����ܼ��ٶ�λ��ʵ���������������һ�¡��о������Ϊ�ƶ������������²�ú����ȷ��λ�ṩ�����뼼��֧�š�
