
DOI: 10.11817/j.issn.1672-7207.2015.02.013
���غ϶�����غ϶ȳ���ϵͳ����ѧ�ֲ����ԶԱȷ���
��ң��������������ƣ�Ҷ�����㻢
(�Ͼ����պ����ѧ ����ѧԺ������ʡ������ϸ���켼���ص�ʵ���ң����� �Ͼ���210016)
ժ Ҫ��
�ֺ͵��غ϶ȳ��֣���������Ԫ�������������ϸնȣ��������ݲ��϶��ʱ��նȵij���ϵͳ��Ťת��ģ�ͣ���ģ��������λ�ƽ�ķֲ����Ժ���Ծ�Խ����о����о�����������������������dzݲ��϶��Ӱ��ʱ�����غ϶ȳ���ϵͳ������λ�ƵĽ⣬����ƽ�ȣ���������Ծ�����غ϶ȳ���ϵͳ�����ߵ�λ�ƽ⣬�ദ��������Ծ����Ƶ�����ڸ�������(������ת�٦�Ϊ1.1~2.1����)��Ե��غ϶ȳ��ֵĶ���ѧӰ��Ҫ���ڶԸ��غ϶ȳ��ֵ�Ӱ�죻����ƫ���������ӣ�������λ�����ӣ�ϵͳ�������ȶ������ͣ�ƫ��������ͨ���ֵ�Ӱ��ȸ��غ϶ȳ��ֵ�Ӱ��Ҫ������������£����غ϶ȳ��ֵ������ȶ���Ҫ������ͨ���ֵ������ȶ��ԣ����и���ƽ�ȣ����ø��غ϶ȳ��ֿ��Խ��ͳ��ֵ���������
�ؼ��ʣ�
���غ϶�������ϵͳ������ѧ���ֲ����ȶ�����
��ͼ����ţ�TH113.1 ���ױ�־�룺A ���±�ţ�1672-7207(2015)02-0465-07
Contrastive analysis of dynamic bifurcation characteristics between high contact ratio and low contact ratio gears system
LI Fajia, ZHU Rupeng, BAO Heyun, YE Fumin, JIN Guanghu
(Jiangsu Key Laboratory of Precision and Micro-Manufacturing Technology, College of Mechanical and
Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract: The nonlinear torsion vibration model of gear system was proposed. Backlashes and time-varying meshing stiffness were taken into consideration. The meshing stiffness of high contact ratio (HCR) and low contact ratio (LCR) gears was obtained by the finite element method. The bifurcation characteristics and jump phenomenon along the line of action were investigated. The results show that when the backlashes and errors are neglected, the displacement along action line of HCR gear system becomes steady and continuous, and without jump phenomenon. However, LCR displacement is broken into two regions. In the range 1.1�ܦ���2.1, the meshing frequency error produces higher dynamic effect for LCR compared with HCR. With the increase of the eccentricity error and the displacement along the line of action, the system stability is decreased gradually and the eccentricity error has more important effect for LCR than HCR. More importantly, HCR gear system has higher stability and more smooth motion than LCR gears. Finally, HCR gear system can decrease the vibration and noise significantly.
Key words: high contact ratio; gear system; dynamics; bifurcation; stability
���غ϶�(HCR)���ִ������غ϶ȴ��ڵ���2�ij��ִ�����ͬʱ���ϵ��ֳݶ����϶࣬�����ֳݳ��ܵ��غ�С�����г�����������ƽ�ȵ��ŵ㣬��ˣ����غ϶ȵij��ִ������ܹ�ע������ѧ�߶Գ��ִ����Ķ���ѧ���Խ����˴����о���Theodossiades��[1]�Կ���ʱ��նȺʹ������ĵ����ɶȳ���Ťתģ�͵���Ծ�Ժ͵����Ӽ�������������о���Parker��[2]�����������ɶȳ��ֶ���ѧģ�ͣ������˳����ڲ�ͬת��Ƶ���µĴ���������Ծ�ԣ�Saghafi[3]�����������ɶȳ���ģ�ͣ���ϵͳȫ�ֲַ��ͻ������Խ������о���Tamminana��[4-6]�����˿�����о���֧�кͳݲ��϶�������ɶ�ֱ����ϵͳ�ķ����Զ���ѧ����Ӱ�죻Wang��[7-8]ѧ�߲�������Ԫ���Ը��غ϶ȳ��ֵijݼ��غɷֲ����ݸ�����Ӧ���ͽӴ�Ӧ�������˼��㣬��δ�Ը��غ϶ȳ��ֵĶ���ѧ���Խ����о������� ��[9]��������϶�ĵ��Գ��ָ������Զ���ѧģ�ͣ���ģ�͵Ķ�̬���Խ������о�����������[10]�о������ɶȳ��ֵ��ȶ��ԡ��ֲ����ͣ�������[11]���غ϶���������С������ǿ�����ΪĿ��Ը��غ϶ȳ��ֽ������Ż������о�δ�漰����ѧ���ݣ��������[12-13]�Ը��غ϶ȳ��ֵ�ʵ�ֺͶ�̬���Խ����˷����о��������˸��غ϶����dz��ֵĶ�̬���ԣ���δ�Ը��غ϶ȳ��ֵķֲ���Ծ�����Խ����о������淼��[14]�Բ�ͬ�غ϶ȵij��ָ��˶��������о�������˲�ͬ�غɺ�ת���µ�ʱ��ͼ����ͼ��Ƶ��ͼ��δ�Ը��غ϶ȳ��ֵķֲ����Խ����о������ڵµ�[15]�Ը��غ϶ȳ��ֵ��غɷ��䣬�նȼ���Ͷ�̬���Խ����˼�����о����������غ϶�ֱ���ָ����Ż���Ʒ�����ͬ��δ�Ը��غ϶ȳ���ϵͳ�����ȶ��Ժ���Ծ�Խ����о����ڴˣ��������߲�������Ԫ�ķ���������غ϶ȳ��ֺ͵��غ϶ȳ��ֵ����ϸնȣ����ø���Ҷ������ϸ��غ϶ȳ��ֺ͵��غ϶ȳ��ֵ����ϸնȣ��Ը��غ϶ȳ��ֺ͵��غ϶ȳ��ֵĶ���ѧ�ֲ����Լ���Ծ�Խ����о���
1 ϵͳģ�ͼ�
������Ťת�ij��ָ�Ťת����ѧģ����ͼ1��ʾ��ͼ1�У�Tp��Tg�ֱ�Ϊ��������Zp�ʹӶ�����Zg���ܵ�Ť�أ���p�ͦ�g�ֱ�Ϊ�����ֵ���ת���ɶȣ�Rp��Rg�ֱ�Ϊ�������ֺʹӶ����ֵĻ�Բ�뾶��bΪ�ݲ��϶��һ�룻e(t)Ϊ�������ϵ��ۺ���CmΪ���ָ����������KmΪ���ָ�֮������ϸնȡ�
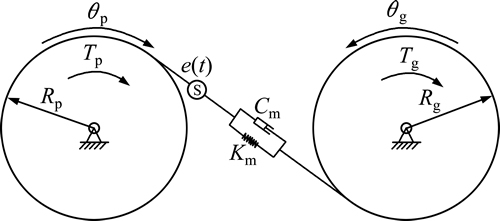
ͼ1 ���ָ�Ťתģ��
Fig. 1 Torsion model of spur gear pair
ͼ1��ʾ�ij��ָ���Ťת����Ϊ
 (1)
(1)
ʽ�У�Ip��Ig�ֱ�Ϊ�������ֺʹӶ����ֵ�ת��������f(x��b)Ϊ���ָ�������λ�ƺ�����
1.1 ��������ʱ��նȼ�������
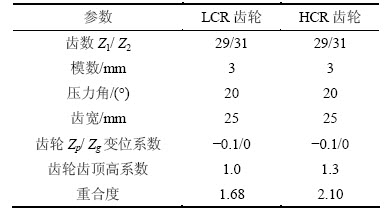
�����غ϶��DZ�ʾͬʱ���ϵ��ֳݶ����IJ�������ͨ���ı���ֵĻ����������ı���ֵ��غ϶ȡ����IJ��øı�ݶ���ϵ����ʽ���ӳ��ֵ��غ϶ȣ������õij��ֲ������غ϶�ϵ�����1��ʾ��
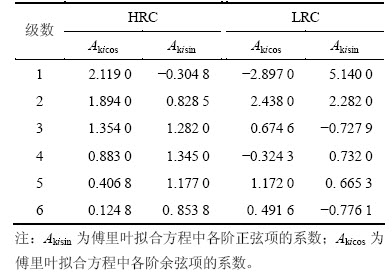
������1�����ij�������Ԫģ�ͣ�����նȽ��м��㣬�õ��������ϸն���ͼ2��ʾ��HCR���ֺ�LCR���ֵ�ƽ���նȷֱ�Ϊ3.85��108 N/m��3.75��108 N/m����������Fourier������ϳ������ϸնȵõ��������ϸն����������ͼ2��ʾ����Ϸ��̵ĸ���г���������2��ʾ��
��1 ���ִ���ϵͳ�������ֻ�������
Table 1 Basic parameters of gears transmission system
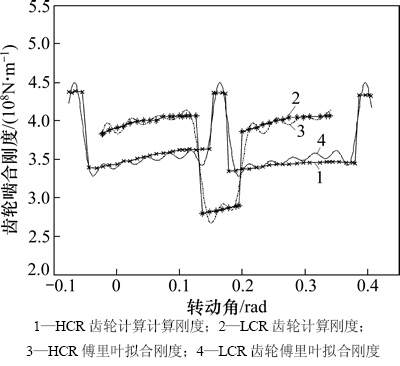
ͼ2 ���ϸն��������
Fig. 2 Fitted curves of meshing stiffness
��2 �նȵĸ���г������
Table 2 Each harmonic parameters of meshing stiffness 107 N/m
���ָ�����������ɹ������������ϵĵ�Чλ�ƺ����ϸն�ȷ����ģ�͵��������ϵ�Чλ����2����λ����������ͶӰ��ɣ������ָ���������������ϵ�ͶӰ�ͳ���ת��λ�����������ϵ�ͶӰ��
�������������������ϵ�λ��ͶӰΪ
 (2)
(2)
ʽ�У�EΪ��Ƶ��Eg��EP�ֱ�Ϊ����Zg�ͳ���Zp�İ�װ����g�ͦ�p�ֱ�Ϊ����Zg�ͳ���Zp����λ����g�ͦ�p�ֱ�Ϊ����Zg�ͳ���Zp��ת�����ٶȡ�
���������ߵĵ�Чλ��xΪ
 (3)
(3)
����ϵͳ�в��ɱ���ش��ڳݲ��϶����϶Ϊ�����Գ���ϵͳ��ǿ���������أ�����ϵͳ�����ߵ�Чλ�Ƶļ�϶����Ϊ
 (4)
(4)
1.2 ���̵������ٻ�
����ʽ(3)��ʽ(1)��Ϊ
 (5)
(5)
ʽ�У� ��
�� ��CΪ���ָ�����������ϵ����
��CΪ���ָ�����������ϵ���� ��kaveΪƽ���նȣ�
��kaveΪƽ���նȣ�
��Ϊ���ָ�����������ȣ� 0.03�ܦơ�0.17��
����ʽ(7)�в��������������ϴ�����������ʱ�� ��λ�Ʊ�Ƴ߶�bc����������λ�ơ��ٶȡ����ٶȡ�������Ƶ�ʷֱ����Ϊ
��λ�Ʊ�Ƴ߶�bc����������λ�ơ��ٶȡ����ٶȡ�������Ƶ�ʷֱ����Ϊ ��
�� ��
�� ,����
,���� ��ͬʱ����
��ͬʱ���� ��
�� ��
�� ��
�� ��
��
 ��
�� ����ʽ(5)���Ի���Ϊ
����ʽ(5)���Ի���Ϊ
 (6)
(6)
ʽ�У� ��
��
2 ����ת�ٶ���������ϵͳ�ֲ����ȶ�����Ծ���Ե�Ӱ��
����4 ��Runge-Kutta���������ʽ(6)�����ֲ������2��ʾ����ϵͳ�Ķ���ѧ���Խ����о������빦��200 kW���ݲ��϶��ʼֵȡΪ50 ��m��λ�Ʊ�Ƴ߶�Ϊ10 ��m��
�����غ϶ȶԸնȵ�Ӱ���Ϊ�������ֺ����������ؼ�ʽ(2)��e(t)��ϵͳ��Ӱ�죬����E=0��Eg=0��Ep=0�������������غ϶ȵĸնȱ仯��ɵ��ڲ������Գ���ϵͳ�ķֲ�����Ծ���Ե�Ӱ�졣
2.1 ת�ٶԷֲ����Ե�Ӱ��
����ϵͳ�����������ȡ0.035ʱ��ϵͳ��������λ�ƣ�HCR������������ת�٦��仯�ķֲ�������ͼ3��ʾ��LCR���ֵķֲ�������ͼ4��ʾ��
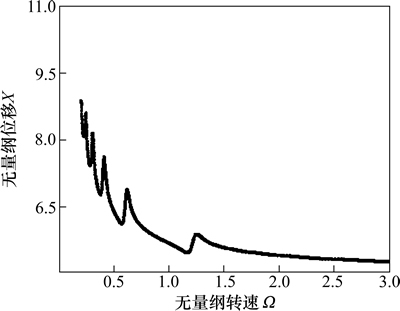
ͼ3 HCR����������λ����ת��ȫ�ֲַ�
Fig. 3 Global bifurcation of HCR gear displacement along gear action line with increase of rotate speed
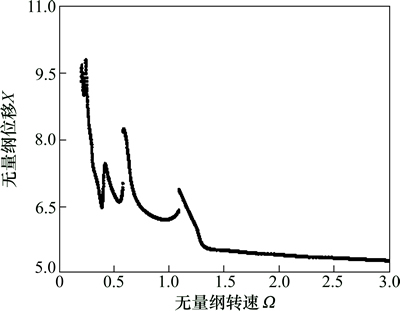
ͼ4 LCR����������λ����ת��ȫ�ֲַ�
Fig. 4 Global bifurcation of LCR gear displacement along gear action line with increase of rotate speed
��ͼ3��ͼ4��֪���ڽ�����Ťת�ij���ϵͳ�иնȶ�ϵͳ�ķֲ�����Ӱ���С��ϵͳδ�������Եķֲ�����LCR���ֵ������ߵ�λ�Ʒ�����Ծ����ͬʱ����2�����Ե���Ծ�㣬HCR���������ߵ�λ��δ������Ծ����ϵͳ������������������Ծ��ϵͳ���е������ȶ���أ���ˣ���Ҫ�Ը�����µ����ж�ֵ�Ժ���Ծ��������о���
2.2 ת�ٶ��ȶ�����Ծ���Ե�Ӱ��
ϵͳ�ڲ�ͬ�ij�ֵ�����¿��Եõ���ֵ������ʳ�Ϊ��Ķ�ֵ�ԣ�����ϵͳ��������Ƶ�ʵ������仯��ϵͳ��λ�ơ��ٶȵȲ�������ͻȻ�ı仯��Ϊ��Ծ����HCR��LCR����ϵͳ�����ߵ�λ����Ծ������ͼ5��ͼ6��ʾ��
��ͼ5��ͼ6��֪��HCR����������λ��������δ�������Ե���Ծ�����ֵ��˶�״̬δ�������Ըı䣬��ͼ3���ֵĹ�����ͬ����LCR���ֵ�������λ����ת�٦�Ϊ0.57~0.58��0.86~1.15�����������Ե���λ����Ծ���ڦ�=2.42ʱϵͳ���������Ե���Ծ����
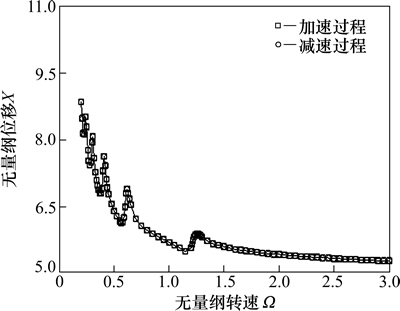
ͼ5 ת�ٶ�HCR����������λ����Ծ��Ӱ��
Fig. 5 Effect of rotate speed on jump of HCR gear displacement along gear action line
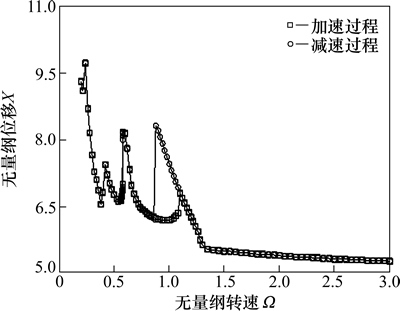
ͼ6 ת�ٶ�LCR����������λ����Ծ��Ӱ��
Fig. 6 Effect of rotate speed on jump of LCR gear displacement along gear action line
����������λ������Ծ�����ϵͳ���˶��IJ��ȶ��ԣ�����Ծ��ʱ��ϵͳ����Ϊ���в��������仯����ǿ�Ȼᷢ���ϴ�ı䣬ʹϵͳ�˶�״̬�����ı䣬�Գ���ϵͳ�����н���ɲ���Ӱ�졣
3 ���Գ���ת�ٷֲ����Ե�Ӱ��
����ϵͳ�Ķ���ѧ�����нϴ��Ӱ�죬���ֵ�������Ҫ�ɳ�Ƶ������ƫ��������ɣ���Ƶ�����ɻ������������ݺ��������Ƶ��ص�������������ϵ�ͶӰ��ɣ�ƫ������Ϊת����������������ҪΪ�������ֵ�ƫ��������������ϵ�ͶӰ��EΪ����Ƶ������������ϵ�ͶӰʸ���ͣ�Eg��EP�ֱ�Ϊ����Zg�ͳ���Zp�İ�װ������������ϵ�ͶӰ��
3.1 ��Ƶ���Գ��ֲַ����Ե�Ӱ��
ȡ�����ٳ�Ƶ����E=1������Ƶ����Ϊ10 ��m���������Eg=0��Ep=0���Ժ���Ƶ������HCR���ֺ�LCR����ϵͳ����ת�ٵķֲ����Խ����о�������ϵͳ�����������ȡ0.035�������ٳݲ��϶Ϊ5�����ݲ��϶Ϊ50 ��mʱ��HCR��LCR����ϵͳ��������λ�ƣ���������ת�٦��仯�ķֲ�������ͼ7��ͼ8��ʾ��
��ͼ7��ͼ8��֪�������ڳ�Ƶ���Ӱ��ʱ������ϵͳ���зḻ�ķֲ����ԣ���ת��ʱ����Ƶ���Գ���ϵͳ���˶�״̬Ӱ���С�����Ǹ��غ϶ȳ����ڹ����������˽ϴ����Ծ����ͬʱ��LCR�����������ʱ��Ծ�����Ծ�������ӣ������䡱�dz���ϵͳ����������Ҫ;��[16]����ת��ʱ��Ƶ���Գ���ϵͳ�ķֲ����Բ����˽ϴ��Ӱ�죬HCR���������ߵ����λ���ڸ�ת��ʱ���ɵ������˶������䡱��������˶���Ȼ��ͨ�������˳������˶�״̬���������ֲ�����6���ڡ�3���ڡ�2���ں͵������˶���LCR�����ܵ���Ӱ���HCR���ָ�ͻ����ϵͳ�ɵ������˶���������α��ֲ��˶����볤�����˶����������ݵij������˶��������ֲ���2�����˶������䡱����ϴ�ת�ٷ�Χ�Ļ����˶������ϵͳ�ɻ����˶�״̬�������ֲ�����2���ں͵������˶���
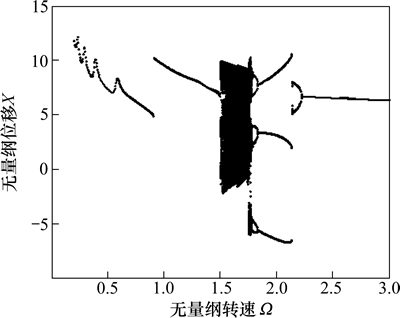
ͼ7 ��Ƶ����HCR�ֲ�Ӱ��
Fig. 7 Influence of tooth frequency error on global bifurcation of HCR gear
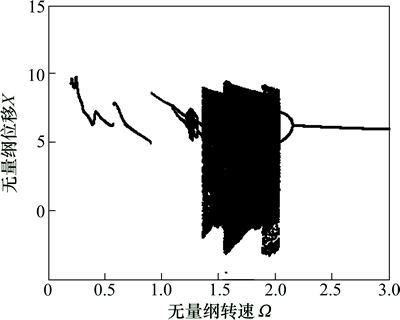
ͼ8 ��Ƶ����LCR�ֲ�Ӱ��
Fig. 8 Influence of tooth frequency error on global bifurcation of LCR gear
��Ƶ������LCR�����ڽϴ�ת�ٷ�Χ�ڶ���ѧ���Բ����ϴ�Ӱ�죬����ϵͳ���������ת�ٷ�Χ��HCR����Ҫ��Ķ࣬���HCR���ֶ�ת�ٵ������ȶ���Ҫ������ͨ���֡�������Ծ�ͻ����˶��Ӿ����ϵͳ������������Ե��غ϶ȳ��֣����غ϶ȳ��ֿ�����Ч���ͳ���ϵͳ����������
3.2 ƫ�����Գ���ϵͳ�ֲ�����Ӱ��
����Ƶ�����趨ΪE=0���ݲ��϶���ֲ��䣬��HCR���ֺ�LCR��������ƫ�����仯�ķֲ����Խ����о�������ϵͳ�����������ȡ0.035�����ֵ������ٰ�װ���Eg=2��EP=2������װ���Ϊ20 ��m��ͼ9��ͼ10��ʾΪHCR��LCR����ϵͳ��������λ����������ת�٦��仯�ķֲ����ԡ�
��ͼ9��ͼ10��֪�������ֵ�ƫ���������ʱ������������λ�Ƶķ�ֵ���HCR����������λ��x�Ľ��ȶ����������������˶�����δ�����ı䣬ϵͳ�ķֲ�����û�з������ʸı䡣ƫ������LCR����������λ��x��ԾӰ��ϴ�ϵͳ����Ծ��ֵ���ӣ��Ӿ���ֵ�����������ת�٦�=2.42ʱ��ϵͳ�����ֲ�����
��������ת�٦�=2.42ʱ��ϵͳ��������������λ����������ӵķֲ�������ͼ11~14��ʾ��
��ͼ11~14��֪������ƫ���������ӣ�ϵͳ�������ȶ�����������ֵ������ߵ�λ��x�䶯��Χ����ڸ�ת����ƫ������LCR���ֵ�Ӱ�����HCR����Ӱ��Ҫ������ƫ���������ӣ�HCR���ֵ��˶�״̬û�з����ı䣬������������ɢ���� ���������������˶�����LCR���ֵ��˶�״̬�����˽ϴ�ı仯���侭�����ֲ��ͷֲ������������ڽ��뵥���ں��ٴν��������ڣ�ͬʱ���ڵ���ɢҪ��HCR���ֵĴӶ����ֽϴ�ƫ������Ӱ����ϵͳ�����ӵ��������С�
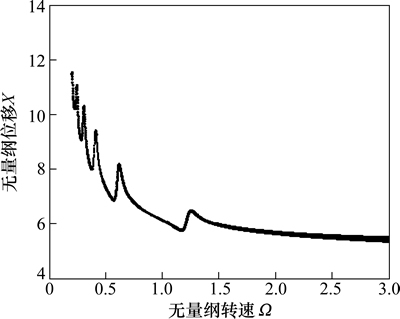
ͼ9 ƫ������HCR�ֲ�Ӱ��
Fig. 9 Influence of eccentric errors on global bifurcation of HCR gear
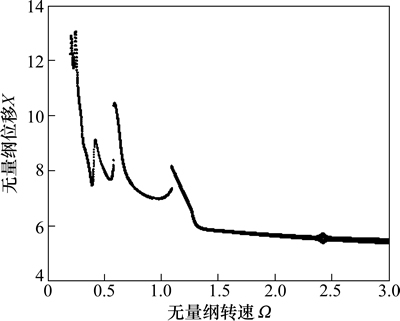
ͼ10 ƫ������LCR�ֲ�Ӱ��
Fig. 10 Influence of eccentric errors on global bifurcation of LCR gear
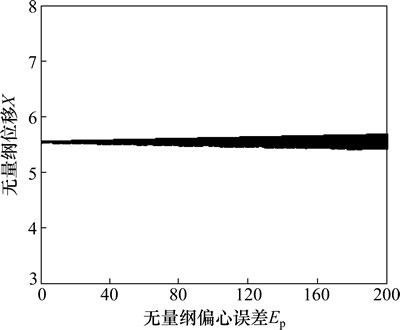
ͼ11 HCR��������������ƫ�����ֲ�
Fig. 11 Influence of eccentric errors on global bifurcation of HCR driving gear
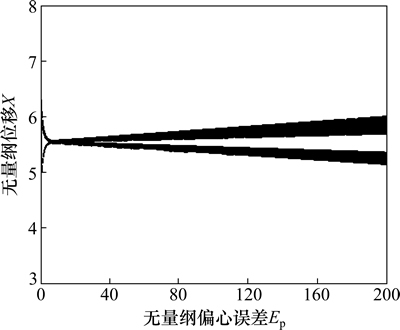
ͼ12 LCR��������������ƫ�����ֲ�
Fig. 12 Influence of eccentric errors on global bifurcation of LCR driving gear
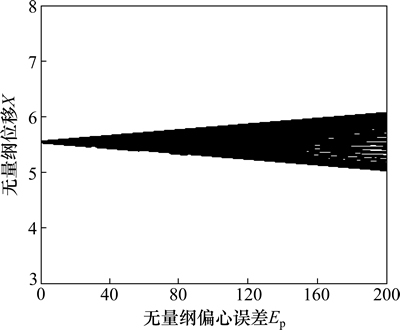
ͼ13 HCR������Ӷ�����ƫ�����ֲ�
Fig. 13 Influence of eccentric errors on global bifurcation of HCR driven gear
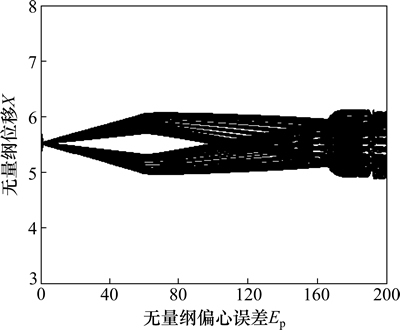
ͼ14 LCR������Ӷ�����ƫ�����ֲ�
Fig. 14 Influence of eccentric errors on global bifurcation of LCR driven gear
4 ����
1) ���������Ӱ�죬�����dzݲ��϶������£�HCR����ϵͳ����ƽ�ȣ���������Ծ����LCR���ֵ������ߵ�λ���ڲ���ת���·�������Ծ�����ڹ���Ƶ�ʸ���(������ת�٦�Ϊ0.57~0.58��0.86~1.15��)�������Ƚϴ���Ծ����ˣ�HCR�����������LCR��������Ҫƽ�ȡ�
2) ��Ƶ����������ϵͳ��������λ�Ƶ�������Ե��ٳ���ϵͳ��Ӱ���С����ʹHCR�����ڹ�������������Ծ��LCR��������Ծ�����Ծ��ֵ���ӣ���Ը�ת�ٳ���ϵͳ�����ϴ��Ӱ�죬��Ƶ������LCR�����ڲ��ָ�ת������(������ת�٦�Ϊ1.1~2.1����)�Ķ���ѧӰ���Ϊ���ԣ�ϵͳ���������Ӱ��ת�ٷ�ΧҪ��HCR���ֵĴ�HCR���ֵ������ȶ���Ҫ��LCR���ֵĸ�ǿ��
3) ����ƫ���������ӣ�����ϵͳ�������ȶ������ͣ����ֵ������ߵ�λ�Ʒ�ֵ���ƫ��������Ծ����Ծ��ֵ���зŴ����ã�ƫ������LCR���ֵ�Ӱ��Ҫ��HCR���ֵ�Ӱ���
�ο����ף�
[1] Theodossiades S, Natsiavas S. Non-linear dynamics of gear-pair systems with periodic stiffness and backlash[J]. Journal of Sound and Vibration, 2000, 229(2): 287-310.
[2] Parker R G, Vijayakar S M, Imajo T. Non-linear dynamic response of a spur gear pair: Modelling and experimental comparisons[J]. Journal of Sound and Vibration, 2000, 237(3): 435-455.
[3] Saghafi F. Global bifurcation and chaos analysis in nonlinear vibration of spur gear systems[J]. Nonlinear Dynamics, 2014, 75(4): 783-806.
[4] Tamminana V K, Vijayakar S, Kahraman A. A study of the relationship between the dynamic factors and the dynamic transmission error of spur gear pairs[J]. Journal of Mechanical Design, 2007, 129(1): 75-84.
[5] LI Shuting. Effect of addendum on contact strength��bending strength and basic performance parameters of a pair of spur gears[J]. Mechanism and Machine Theory, 2008, 43: 1557-1584.
[6] Kim W, Yoo H H, Chung J T. Dynamic analysis for a pair of spur gears with translational motion due to bearing deformation[J]. Journal of Sound and Vibration, 2010, 329: 440-4421
[7] WANG Jiande, Howard I. Finite element analysis of high contact ratio spur gears in mesh[J]. Journal of Tribology, 2003, 127: 469-483.
[8] Thirumurugan R G. Critical loading points for maximum fillet and contact stresses in normal and high contact ratio spur gears based on load sharing ratio[J]. Mechanics Based Design of Structures and Machines, 2011, 39: 118-141.
[9] ���ξ�. ���Գ���ϵͳ��϶�����Զ���ѧ�о�[D]. ����: ������ҵ��ѧ����ѧԺ, 2002.
LIU Mengjun. The backlash nonlinear dynamics characters of single pair gear system study[D]. Xi��an: Northwestern Polytechnical University. School of Mechanical Engineering, 2002.
[10] ������, ������������. �����ɶȳ��ִ���ϵͳ�ķ���������[J]. ��е��ѧ�뼼��, 2004, 23(10): 1191-1193.
LIU Xiaoning, WANG Sanmin, SHEN Yunwen. Nonlinear vibrations of 3-dof geared rotor-bearing system[J]. Mechanical Science and Technology, 2004, 23(10): 1191-1193.
[11] ����, ���. ���غ϶�Բ�����ִ�����Ŀ���Ż����[J]. ��е����, 2012, 36(7): 43-46.
ZHAO Ning, YANG Jie. Multi-objective optimization design of high contact ratio cylindrical gear drive[J]. Journal of Mechanical Transmission, 2012, 36(7): 43-46.
[12] ������, ������, ������. ���غ϶����dz���ϵ�����Ż����[J]. ��е���������, 2011(12): 41-43.
QU Zhenzhen, BAO Heyun, ZHU Rupeng. Optimal design for parameter of high contact ratio planetary gears system[J]. Machinery Design & Manufacture, 2011(12): 41-43.
[13] �����䣮���غ϶����dz��ִ���ϵͳ��Ƽ�����ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2011.
QU Zhenzhen��Design and dynamics analysis of high contact ratio planetary gear transmission[D]. Nanjing: Nanjing University of Aeronautics and Astronautic. School of Mechanical Engineering, 2011.
[14] ���淼, ������, �ƿ�. �غ϶ȶԳ��ָ������Զ���ѧ����Ӱ���о�[J]. ��ϻ������Զ����ӹ�����, 2014(2): 40-43.
ZHANG Zufang, CHEN Weidong, HUANG Kang. Research on effect of contact ratio on non-linear dynamics of spur gear pair[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2014(2): 40-43.
[15] ���ڵ�, ��Т��, �ξ��. ���غ϶ȳ��ֵ������о�[J]. ����, 1987, 11(1): 27-32.
FANG Zongde, JIANG Xiaoyu, SONG Jingying. Performance study of high contact ratio gear[J]. Gear, 1987, 11(1): 27-32.
[16] ��ͬ��, ������, ������, ��. ���dz���ϵŤת��������ģ���˶��ֲ������о�[J]. ��е����ѧ��, 2011, 47(21): 76-83.
LI Tongjie, Zhu Rupeng, Bao Heyun, at al. Nonlinear torsional vibration modeling and bifurcation characteristic study of a planetary gear train[J]. Journal of Mechanical Engineering, 2011, 47(21): 76-83.
(�༭ �Կ�)
�ո����ڣ�2014-04-20�������ڣ�2014-07-15
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51305196)�������У��������ҵ���ר���ʽ�������Ŀ(NZ2014201)(Project (51305196) supported by the National Natural Science Foundation of China; Project (NZ2014201) supported by the Fundamental Research Funds for the Central University)
ͨ�����ߣ������������ڣ���ʿ����ʦ�����»�е�������ṹǿ�ȡ���еCAD���Զ����о���E-mail��rpzhu@nuaa.edu.cn
ժҪ����Ը��غ϶ȳ��ֺ͵��غ϶ȳ��֣���������Ԫ�������������ϸնȣ��������ݲ��϶��ʱ��նȵij���ϵͳ��Ťת��ģ�ͣ���ģ��������λ�ƽ�ķֲ����Ժ���Ծ�Խ����о����о�����������������������dzݲ��϶��Ӱ��ʱ�����غ϶ȳ���ϵͳ������λ�ƵĽ⣬����ƽ�ȣ���������Ծ�����غ϶ȳ���ϵͳ�����ߵ�λ�ƽ⣬�ദ��������Ծ����Ƶ�����ڸ�������(������ת�٦�Ϊ1.1~2.1����)��Ե��غ϶ȳ��ֵĶ���ѧӰ��Ҫ���ڶԸ��غ϶ȳ��ֵ�Ӱ�죻����ƫ���������ӣ�������λ�����ӣ�ϵͳ�������ȶ������ͣ�ƫ��������ͨ���ֵ�Ӱ��ȸ��غ϶ȳ��ֵ�Ӱ��Ҫ������������£����غ϶ȳ��ֵ������ȶ���Ҫ������ͨ���ֵ������ȶ��ԣ����и���ƽ�ȣ����ø��غ϶ȳ��ֿ��Խ��ͳ��ֵ���������
[9] ���ξ�. ���Գ���ϵͳ��϶�����Զ���ѧ�о�[D]. ����: ������ҵ��ѧ����ѧԺ, 2002.
[10] ������, ������������. �����ɶȳ��ִ���ϵͳ�ķ���������[J]. ��е��ѧ�뼼��, 2004, 23(10): 1191-1193.
[11] ����, ���. ���غ϶�Բ�����ִ�����Ŀ���Ż����[J]. ��е����, 2012, 36(7): 43-46.
[12] ������, ������, ������. ���غ϶����dz���ϵ�����Ż����[J]. ��е���������, 2011(12): 41-43.
[13] �����䣮���غ϶����dz��ִ���ϵͳ��Ƽ�����ѧ����[D]. �Ͼ�: �Ͼ����պ����ѧ����ѧԺ, 2011.
[14] ���淼, ������, �ƿ�. �غ϶ȶԳ��ָ������Զ���ѧ����Ӱ���о�[J]. ��ϻ������Զ����ӹ�����, 2014(2): 40-43.
[15] ���ڵ�, ��Т��, �ξ��. ���غ϶ȳ��ֵ������о�[J]. ����, 1987, 11(1): 27-32.
