
DOI: 10.11817/j.issn.1672-7207.2018.04.011
���������������բ�ƶ�ϵͳ����Һ���潨ģ
���գ������������
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
��բ�ƶ�ϵͳ�ƶ����̵Ķ�̬���ܣ�������������ʽ�������ƶ�ϵͳ����ѧADAMSģ�ͣ�������ѹ�ͻط�������ʵ����Խ�����жԱ���֤��ͬʱ����Ը�˿������������ģ��Ϊ�����������ƶ�����ģ�ͣ���ɶ�����բ�ƶ�ϵͳ�Ķ���ѧ��ģ����������բ�ƶ�ϵͳ��Һѹϵͳ����ģ�ͣ�����Simulink�н�����Ӧ�Ķ����ƶ���������ƶ����Ʋ���ģ�͡���SimulinkΪ���ɻ��������ö��������Ϸ��淽ʽ��������բ�ƶ�ϵͳ�Ļ���Һһ�廯����ϵͳ�����ø�ϵͳ�������������·ų��ٹ����µĶ����ƶ��ͺ�����ƶ����ܽ��з����о����о������������Ƶ��ƶ�ϵͳ����Һ�������в���������Ч��������ƶ��ȶ����ƶ��Ķ�̬���ܸ�ƽ�ȡ�
�ؼ��ʣ�
�����������բ�����Ϸ����������ƶ���������ƶ���
��ͼ����ţ�TD534 ���ױ�־�룺A ���±�ţ�1672-7207(2018)04-0848-09
Mechanical-electrical-hydraulic modeling of disc braking system for ultra deep mine hoist
WANG Gang, DI Yapeng, LI Jiantao
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: To study the disc braking system dynamic performance during braking, multi-body dynamic model of the multi-rope winding hoist was established in ADAMS and verified by comparing the hydraulic hysteresis simulation results with the experimental results. Combined with the braking load based on the continuous elastic model of the wire rope, the hoisting system dynamic model was established in Simulink. Meanwhile, the hydraulic system model was established and the control strategy model of two-stage braking and constant decelerating braking were established in Simulink. Using the multi-software co-simulation technology, the mechanical-electrical-hydraulic simulation system of the disc braking system was formulated with Simulink as integrated environment. The dynamic performance of two-stage braking and constant decelerating braking at the heavy dropping overspeed was studied based on the simulation system. The results show that design operation parameters of the mechanical-electrical-hydraulic system are correct and effective, and the dynamic performance of constant decelerating braking is more stable than that of the two-stage braking.
Key words: ultra deep mine hoist; disc brake; co-simulation; two-stage braking; constant decelerating braking
���ҹ�ú̿ϵͳ��ͨ����������ȴ���1.2 km�Ŀ���Ϊ�����[1]�������о��ij��������������������Ϊ1.5 km����������ٶ�Ϊ18 m/s����Ч�غ�Ϊ50 t����Ŀǰ�ҹ�����������Ŀ���������������������˫��Ͳ��������ʽ�Ķ������������˽ṹ���ýṹ������ʽ��������һ�ֲ�����ʽ[2]��2��Ͳ�������ã������ʹ�������������Ա�֤��еͬ����ͬһ��Ͳ�ϵ�2����˿�����Ʒ�ʽ��ͬ�������ø������ֺ�����ƽ��װ���Ա�֤2���������⣻��ͬ��Ͳ�ϵĸ�˿�����Ʒ�ʽ�෴���Էֱ�ʵ��������·š��������1.5 km����ʱ�������������ȶ���Ħ��ʽ��������ǿ�����������߶ȱȶ���Ħ��ʽ�������ĸߡ��������߶Ⱥ�����ϵ������ͬʱ�������������ǵ�������ʽ��������1��[3]��������ʺ����ڳ��������������բװ�á�Һѹվ������ƹ�һ������բ�ƶ�ϵͳ��������������������һ�㰴�趨���ٶ��������У����й����еļӡ�������Ҫͨ�������ƶ���ɣ�����բ�ƶ�ϵͳ�������ò��ڰ�ȫͣ�Ⱥ�ʵ�ֱ�բ��������Ҫ�����ƶ����ϣ���������ֻ����������բ�ƶ�ϵͳ���ٲ�ͣ������ˣ����DZ��Ͽ�ȫ��ؼ��Ļ��ڡ����ڳ�����������ڸ������й����г��ܵ������衢����������ȸ������صĸ��ţ������������Ը��ӣ���˿�����غɱ仯������������·���������ء����غͻ���Ȳ�������������ϵͳ����ѧ���Բ������������и��١����ء��������ǿʱ����ص㣬������о��������������ȫ����̬���ܣ�̽Ѱ������������װ����ȫ����֮������ڹ�ϵ�����ش������������о���������������բ�ƶ�ϵͳ���濪չ�˴�����������������[4]���ҹ���������ʽ�����������ƶ����ٶȽ��������۷�����ָ��������ú��ȫ��̶��ƶ����صı���Ҫ��ʱ�����ٶȿ��ܸ��ڹ涨ֵ����ǿ[5]ͨ�������Ķ����嶯��ѧģ�ͼ�Һѹϵͳģ�ʹ������������ģ�ͣ����ط�����ҺѹԪ�������仯�Խ����ƶ����в�����Ӱ�죬����չ�����ʵ�顣��۾�[6]������ȫ���ֿ��ơ���Ӳ�������ȫʱ����ٿ��Ʋ��ԡ�BAO��[7]������բբ���ڽ����ƶ������е�Ħ��ĥ�����Խ������о���GRZEGORZEK��[8]�����������㷨Ԥ������բ���ƶ������е�Ħ��ĥ�����ԡ������о���༯���������������ƶ���ijЩ���棬û�����ۺ��������о�����������բ�ƶ�ϵͳ���ƶ���ȫ���ܣ����ҶԳ���������ص���ҵ��������Բ�ǿ�����ڳ�����������Ǽ�����Һһ�廯�Ĵ�����װ�����б�Ҫ��ϵͳ�ĽǶ��о����������������բ�ƶ�ϵͳ���ƶ����ܡ�Ϊ�ˣ��������߷ֱ�����Ӧ�Ļ�е���ֶ���ѧģ�͡�Һѹϵͳģ�͡����Ʋ���ģ�ͣ�����ADAMS��AMEsim��Simulink�Ķ�����Эͬ���淽ʽ��������բ�ƶ�ϵͳ�Ļ���Һһ�廯����ϵͳ�����ڴ˻����϶Գ�����������Ķ����ƶ��ͺ�����ƶ����з����о���
1 ����բ�ƶ�ϵͳ����ԭ��
ϵͳ��������բ�����ѹ���½�����Դ�жϡ�������Ա��ȫװ�õĸ�Ԥ���������ƶ�ϵͳ�����ƶ���բ���������������������ʽ����բ�����ƶ�����ͼ1��ʾ������բ�����ε��ɲ����ƶ���������ѹ��բ������ѹ����ʱ��������Һѹվѹ�������ô���������˨���ƣ��Ӷ�ѹ�����ε��ɲ�����բ�����ƶ��̷��룬�ƶ���������բ״̬������ѹ����ʱ���ڵ��ε��ɻظ��������£�բ�߿����������ƶ��̲�����ѹ�����ƶ��������ƶ�״̬�����ε��ɵ��ƶ������㹫ʽΪ

ʽ�У�FNΪ����բ���ƶ�����ksΪ���ε��ɸնȣ���xΪ���ε���ѹ������pΪ��Һѹ����ApΪ�ƶ���������Ч�����fzΪ���ε����ۺ�������
�����������ƶ���Ҫ�ж����ƶ��ͺ�����ƶ�2�ַ�ʽ�������ƶ���ָ�ڽ����ƶ���ʼʱ��һ�����ƶ�ͷ(һ��Ϊ�ƶ�ͷ������һ��)��ȫʩ���ƶ������������ϰ�ȫ�涨���ƶ����ٶȣ���һ�����ƶ�ͷ����Һѹվ����ֻ�ṩ�����ƶ�����������������ʱ����ȫ��ʩ�ӵ��ƶ����ϣ�ʹ������Ѹ��ͣ������ȫ�ɿ��ؽ���բס������ٰ�ȫ�ƶ���ָ���������ƶ����ٶȺ㶨Ϊ����Ŀ�꣬ͨ���Զ������ƶ����أ�ʹ�����������趨�ļ��ٶȽ����ƶ����ƶ���ʽ���ҹ�ú��ȫ��̹涨������������բ���ƶ����ز���С��ʵ�������������ת���ص�3����������������������ٶȲ�����5.0 m/s2���·�������ٶȲ�����1.5 m/s2���ƶ�����բ�ߵļ�϶�����2 mm������բ�ն�ʱ�䲻�ó���0.3 s��Ϊ����涨Ҫ���������������բ�ƶ�ϵͳ����Ҫ�����������1��ʾ��
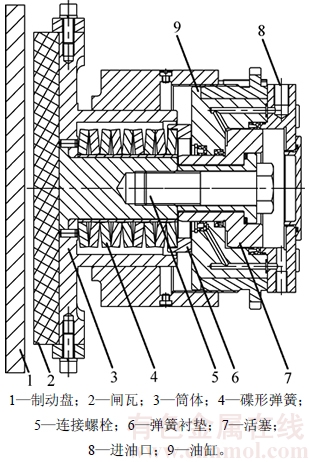
ͼ1 ����ʽ����բ�ṹ��ͼ
Fig. 1 Structure diagram of disc brake with cylinder rear-mounted
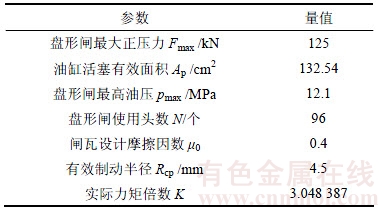
��1 ����բ�ƶ���ϵͳ��Ҫ��������
Table 1 Main technical parameters of disc braking system
2 �ƶ�ϵͳ����ѧ��ģ
2.1 ����բ�ƶ�װ�ö���ѧģ��
���ݳ��������������Ҫ������������Solidworks�н���������������Ͳ���ƶ��̡����ἰ����բ��װ����ģ�͡���ģ�͵���ADAMS�У���ADAMS/viewƽ̨�ϣ����Ǹ������ĽӴ����������Ħ��������������բ�ƶ�װ�ö���ѧģ�ͣ���ͼ2��ʾ��
���������ֺ͵綯��ת�Ӱ���λ�������㵽2����ͲԲ���ϣ����Դ������ֵı�λ�����������ı�λ�������2��ʾ��

ͼ2 ����բ�ƶ�װ�ö���嶯��ѧģ��
Fig. 2 Multi-body dynamic model of disc braking device
��2 ���ֺ͵綯��ת�ӵı�λ����
Table 2 Deflection qualities of head sheaves and motor rotors

����բ�еĵ��ε��ɲ�����բ�ƶ�����ÿ������բ����1�����ε����飬��9Ƭ���ε��ɶԺ϶��ɡ����ε������װ�䳤��Ϊ148.5 mm����ѹ�����Խ��Ƴ����Թ�ϵ����ͼ3��ʾ����ADAMS��û�н������ε��ɵ�ʵ��ģ�ͣ������Ե���������ʽ�����ڵ��ɳĵ��Ͳ��֮�䲢�������������롣
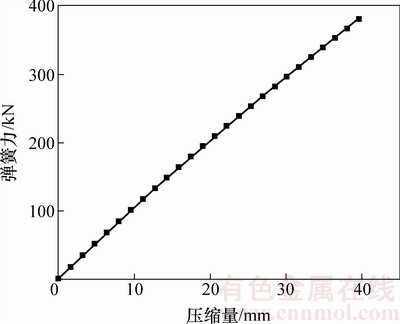
ͼ3 ���ε���ѹ������
Fig. 3 Compression characteristic of disk spring
���ε����ڲ�����ѹ��ʱ������Ҫ�˷�Һѹ�͵����ã�����Ҫ�˷��ۺ�������Ӱ�졣���IJ����ڵ��ε�����ʩ���������ἰ�ڻ��������ƶ���ʩ�ӿ���Ħ�����ķ�ʽ��ģ���ۺ��������ο�ADAMS�����ļ����õ��ۺ������ļ��㹫ʽΪ

ʽ�У�CvΪ�������ϵ����rΪ���ε���ʵ�ʳ��ȣ�dr/dtΪ���ɳ��ȶ�ʱ��ı仯�ʣ�lΪ���ɳ�ʼ���ȣ�FpreΪ��ʼ�����µ��ɵ�Ԥѹ������fcΪ�ƶ����Ŀ���Ħ������
���ں������բ��ѹ�ͻط�������ʵ����Խ���Ա���ͼ4��ʾ���ɼ���������ʵ�������Ǻϡ�
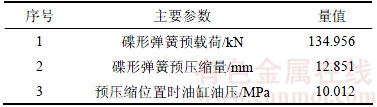
��������բ���ƶ��̵ļ�϶Ϊ1 mm������բ������ȷ��װλ��ʱ����Ҫ�����������3��ʾ��
2.2 �ƶ����ط�����ģ��
��˿���������������ֺ���������������һ�𣬾������������ԣ������������Ťת����������õĸ�����״̬��[9]�����������ƶ������й��Ը��صļ��ٶ�����������Ҫ���أ����⣬���������Ľṹ��״������ʽ����������Ħ�������������ٶȡ������ٶȵ���������ͬ����������Ӱ�졣��������������ɵ�Ӱ�����Ծ�ȷ���㣬�������������ͨ���������������������w�����㣬����㹫ʽΪ[10]

ʽ�У�K0Ϊ������ϵ�������ù�������ʱ��K0=1.2��Q0Ϊ����������������Ϊ��˿����λ���ȵ���������HΪ��������·Ų�߶Ȳ
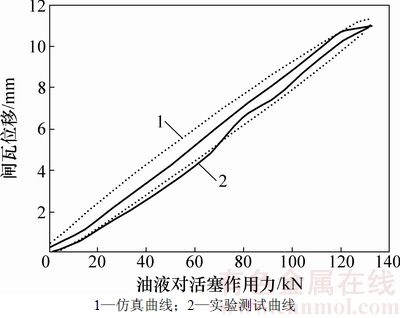
ͼ4 ����բ����ģ����ѹʵ������ʵ�����Ա�
Fig. 4 Comparison of hydraulic hysteretic curve between simulation results and measured results
��3 բ��϶Ϊ1 mmʱ����բ��Ҫ����
Table 3 Main parameters of disc brake when disc clearance is 1 mm
��˿�����������������Ͷ��������ĸ�����ʹ�ø�˿���������ϱ仯�����������������½������У���˿�����Ͳ���ϵؽӴ�����룬�Ӵ������㴦��˿��������ֱ�������ھ�Ͳ�ϣ���ˣ��ɽ��������ƶ�ϵͳ�ĸ��ر仯��ЧΪ��˿�������Ͳ�Ӵ������㴦�������仯��������Simulink����S-function����ʽ����������ϵ��̬����ģ�ͣ����������¼��裺
1) ����������ȴ����������Ͳ֮����������Ƚ϶̣���ˣ����Ըö�������˿�����Ե�Ӱ��[9]��
2) ���������Dz�����������Ҫ����ͬʱ�����ܹ�Լ��������ѡ��Ťת�˶��������������ǹɸ�˿��[9, 11]����ˣ����Ը�˿�������˶���Ťת�˶��Ը�˿��������Ӱ�졣
3) ���ڽ����ƶ�ʱ��϶̣���ˣ����Խ����ƶ�����������Ƶ��µĸ�˿���������ȵı仯���������˿�����Ͳ�����Ӵ�����1���̶��㡣
Ŀǰ������˿������������ģ����Ҫ�м��в�������ɢģ�͡�����������ģ�͡�����Ԫģ�ͼ�����ADAMS�����ཨģ��������������ɢģ��[12]�������������У���������������ģ�ͽ���һ�����α߽������������IJ������̣�������ɢ����������������Ի����õ��������̵Ľ��ƽ����⣬������ڼӡ����ٶ�Ϊ��������������ʽʱ��������þ�ȷ�������[13]�����ڸ÷����ܹ��Ƚ�ȷ�ط�ӳ��˿�������������ԣ������������Ϸ���ģ�����ϣ���ˣ����IJ�������������ģ�ͼ����˿����������˿���Ķ���������ʾ��ͼ��ͼ5��ʾ��
��������Ϊ�������ƶ����ٶ�a(t)Ϊ������������ʱ����˿��������洦��λ��uk(x��t)Ϊ[13]��

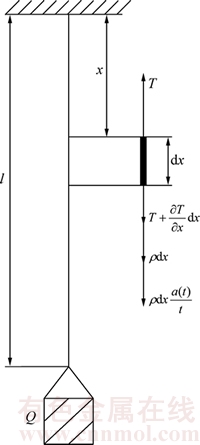
ͼ5 ��˿����������ʾ��ͼ
Fig. 5 Calculation diagram of wire rope tension


����


 ��
��
 ��
��
 ��
��
��Խ����Ϊ

���ǵ�

��˿��������洦�Ķ�����Td(x,t)Ϊ[13]


���У�xΪ��˿�����浽�����Ӵ���ľ��룻Ank��BnkΪ��������ı�����QΪ��˿�����ն������� EΪ��˿���ĵ���ģ����AsΪ��˿���ĺ�������gΪ�������ٶȣ�cΪ���Բ��ڸ�˿���еĴ����ٶȣ���Ϊ��˿���������ն�����֮�ȣ���nΪ��Խ���̵ĸ���aΪ��������Ͳ���ƶ����ٶȣ�kΪ��ɢֱ�ߵĶα�ţ���Ϊ��ɢʱ��������������x=0ʱ����ø�˿�����Ͳ�ĽӴ�������㴦�Ķ�����Td(0,t)Ϊ[13]

��������[10]����λ�Ƽ��غɷ��̵���Ͳ��ֿ��Ժ��Լ��������Ӱ�졣
3 Һѹϵͳģ�͵Ľ���
���������������բ�ƶ�ϵͳ��Һѹվԭ��ͼ��ͼ6��ʾ����Һѹվ��ʵ�ֹ����ƶ��������ƶ���������ƶ�������һ���ƶ��Ĺ��ܲ������˶�ͨ��������ƣ�������1ͨ���������ϣ����2ͨ����������ʼ����������û�п������ಿ����ֻ��������ƶ���ص���·���ֽ��н�ģ��
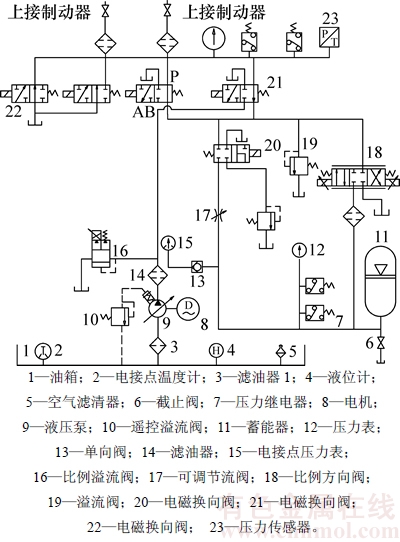
ͼ6 Һѹϵͳԭ��ͼ
Fig. 6 Schematic diagram of hydraulic system
3.1 Һѹϵͳ����ԭ��
��AMEsimƽ̨�Ͻ���Һѹϵͳģ�ͣ���ͼ7��ʾ��ϵͳ������ΪҺѹ�����뷽�ķ����ź�c1��c2��c3�Լ�����բ������λ��s���ٶ�v�����Ϊ�����õ�����Һ�Ի���������F����Ż���1�ϵ�ʱ���ھ���ͨ������ʱ���ھ�����ͨ��
�����ƶ�ʱ��������������λ����Ż���1��ͨ����Ż���2��ʱ��ͨ����Һͨ��������2���γɶ����ƶ��ĵ�һ���ƶ���ѹ����������ʱ���ɵ�ŷ�2�ص�����Ӷ�����ȫ���ƶ�������ɶ����ƶ����̡��ڴ˹����У�������Ӧ�����ͣ�����ѹ���͵����ã���������ϵͳ�Ŀ������̣���Ӧ��������Ӧά��3~7 s(���������ٶ�)���ɵ�������������������ϵͳ�IJ����ٶȣ�������̫С�����Ͳ��㣻������̫�������ʱ�䲻����������ƶ���ʼ��Ż���1��2���ϵ磬����������c3���ƣ�����ͨ������й�ͻ����������Ͳ���ά�ֺ�����ƶ�����Ҫ�����ء�
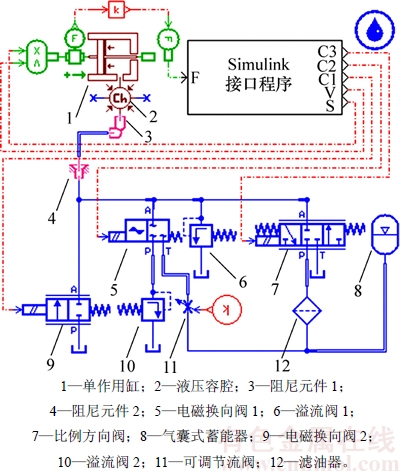
ͼ7 ҺѹϵͳAMEsim����ģ��
Fig. 7 Simulation model of hydraulic system in AMEesim
3.2 ��ҪԪ������������ѡȡ
�����ø�Һѹ��ǻ��ADAMS��AMEsim���ݽ����Ļ��ڡ�һ���棬�������������բ�������ٶ�v��λ��s����̬�ؼ�������բҺѹ���ڲ���ǻ�������������һ���棬������õ�����Һ�Ի������������ظ�ADAMS����Ԫ���������ձ�3���й��������á�Һѹ����ǻ���V����Һ�Ի���������F�ļ��㹫ʽΪ��
ʽ�У�xpreΪ����Ԥѹ������dpΪ��ֱ����drΪ������ֱ����
������1�趨����բ��ѹpxΪ9.43 MPa�����������ƶ�����բ�ߵ�1 mm��϶��ʹ�ƶ���ʼ������բѸ�ٶ�������ֹ�ɳ����ٶȳ�������բ�ͱü��㹫ʽΪ[14]

ʽ�У�FcΪ����ϵͳ�������RΪ��Ͳ�뾶����Ϊբ��Ħ������������ʱһ��ȡ0.35��
������2��������ѹp1Ϊ4.3 MPa������������������ҵ�������ڼ�������ƶ��ĵ�һ���ƶ���ѹʱ��ԭ���ϰ��·������������ƶ����ٶȼ���[14]�����㹫ʽΪ

������Ԥ�������VpreѡΪ4 L��Ԥ����ѹ��ppreΪ5.16 MPa�����㹫ʽΪ

��������������������Դ�ã��ʿɰ����ȹ��������㣬�������Ĺ����ݻ�VwΪ
ʽ�У�pmaxΪ��������ȫ��Һʱ�������pminΪ��������ȫ��Һ״̬ʱ��������ھ��ȹ����У�n=1.4��
ģ���б�������ȡ�����������ԣ������ź��뷧�Ŀ��ڶȺ����������ȡ��ɿ�������ʽ�÷�������qΪ
ʽ�У�CqΪ����ϵ����A(c3)Ϊ���Ľ����߿����������ǿ����ź�c3�ĺ�������Ϊ������������ʱ������ϵ������LΪ��Һ�ܶȣ���pΪ������ǰ���ѹ���
4 ����Һ���Ϸ���
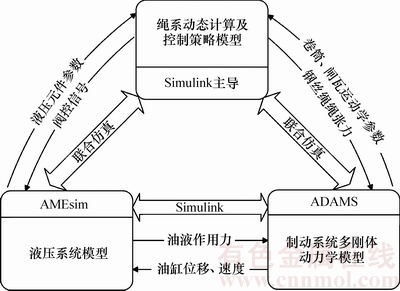
ADAMS��AMEsim��Matlab/Simulink��Ϊ����2�������ṩ�˸�Ч�������Ľӿ���ʵʱ��������[15]���ӿڿɷ�Ϊ��ȫ��������Ϸ���2��ģʽ��ѡ����Simulink��Ϊ���ɻ���������ADAMS��AMEsim����ʱ����������SimulinkΪ���������Ϸ��淽ʽ���з��棬���Ϸ���ԭ����ͼ8��ʾ�����������AMEsim��ADAMS�е�ģ�Ͷ���S-function����ʽ���ڣ���ˣ����߿���SimulinkΪý���Զ�ʵ�����ݽ������Ӷ��ﵽ���Ϸ����Ŀ�ġ�
����ͼ8��ʾԭ������Simulink�д���Ϸ��������ͼ9��ʾ��ͼ9�С�adam�ӳ�����ADAMS�����Simulink����ϵͳ��������ʾADAMS������ģ�͵�S-Function��������Simulink�������ݣ����Ϸ�����SimulinkΪ���������ñ䲽������ķ�ʽ���У����еĴ��ݺ���������������������Ӱ�졣
ͼ8 ���Ϸ���ԭ��
Fig. 8 Schematic principle of co-simulation
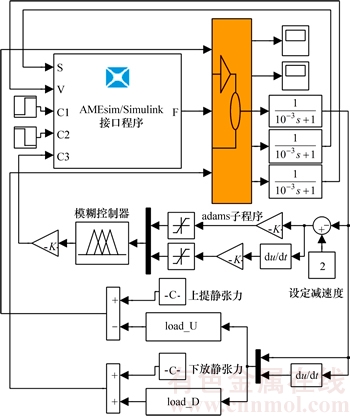
ͼ9 Simulink���Ϸ����ͼ
Fig. 9 Block diagram of co-simulation in Simulink
ϵͳ����Ϊ�ƶ����ٶȵ��趨ֵ���ƶ���ʼʱ��ͲԲ�ܴ������ٶȡ�������·Ų��ʼ���������ء�ϵͳ���Ϊ��ͲԲ�ܴ������ٶȡ�ʵ���ƶ����ٶȡ���˿��������������բ����ѹ��
���ƶ����Ʋ����ϣ������ƶ�����ֻ���趨2�����Ľ�ͨ��ϵ����ʱʱ�䡣�趨�����ƶ��ĵ�һ���ƶ�ʱ��Ϊ12 s�����·����صĹ涨Ϊ�������ݣ��ƶ�ʱ��t1���㹫ʽΪ

���У�vmΪ�ٶ����ֵ��aminΪ���ٶ���Сֵ��
������ƶ������������Simulink�н���mamdaniģ���������ķ�ʽʵ�֡�ѡȡ��Ͳ�ƶ����ٶ����趨���ٶȵ�ƫ���Լ�ƫ��ı仯��Ϊģ�������������룬��������������ź���صĿ�������Ϊģ���������������
���������������ƶ��Ĺ����кܶ࣬����ѡȡ�����·ų��ٹ������г���������������ƶ����档�ƶ���ʼʱ����ͲԲ�ܴ������ٶ�ȡΪ20 m/s���·Ųฺ��Ϊ490 kN����ʼ����Ϊ1 km���������أ���ʼ����Ϊ500 m��
�����ƶ��ķ�������ͼ10��ʾ��������ƶ��ķ�������ͼ11~14��ʾ����ͼ10�ɼ����ڶ����ƶ������У���Ͳ���ƶ����ٶ���1.50 m/s2��1.75 m/s2�������ӣ��ڽӽ�13 sʱ�����ƶ�����ڶ��Σ���ʱ��ȫ���ƶ�����ʩ�����ƶ������������ƶ����ز�С��ʵ�������������ת���ص�3��Ҫ��ͬʱ��Ͳ�õ�1���ϴ��˲ʱ���ٶȣ����䱻����բ��������Ѹ�ٽ���Ϊ0 m/s2��
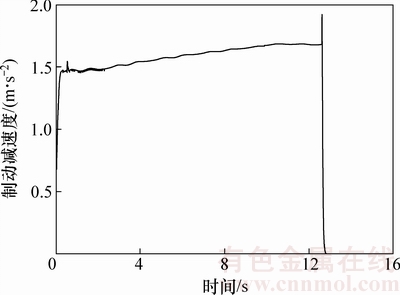
ͼ10 �����ƶ�ʱ��Ͳ�ƶ����ٶȱ仯����
Fig. 10 Braking deceleration curve of drum under two-stage braking
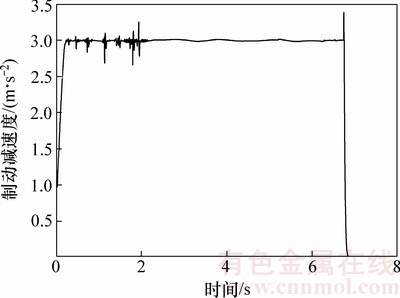
ͼ11 ������ƶ�ʱ��Ͳ�ƶ����ٶȱ仯����
Fig. 11 Braking deceleration curve of drum under constant decelerating braking
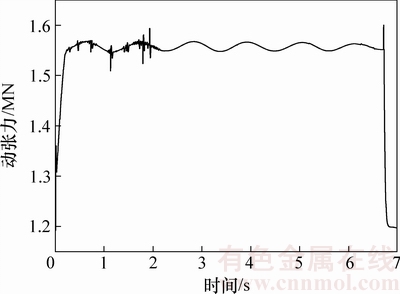
ͼ12 ������ƶ�ʱ������˿�������仯����
Fig. 12 Wire rope tension changing curve of lift side under constant decelerating braking
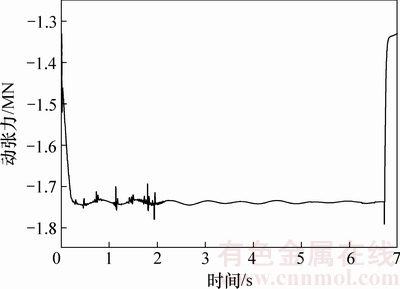
ͼ13 ������ƶ�ʱ�·Ų��˿�������仯����
Fig. 13 Wire rope tension changing curve of drop side under constant decelerating brake
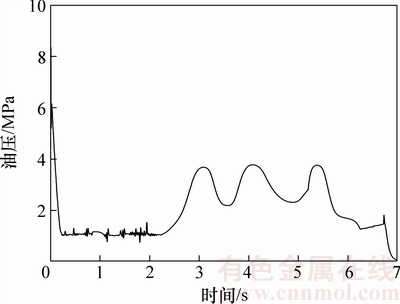
ͼ14 ������ƶ�ʱ����բ����ѹ�仯����
Fig. 14 Changing curve of oil pressure in disc brake under constant decelerating braking
��ͼ11~14�ɼ����ں���ٹ����У���Ͳ�ļ��ٶ���3 m/s2����С���Ȳ���������ڶ����ƶ���������ƶ��ƶ��Ķ�̬���ܸ���ƽ�ȣ�������˿����������1 550 kN���仯���·Ų��˿���������� -1 750 kN���仯�����ű�ʾ��������˿�������Ծ�Ͳ���������ط����෴��
5 ����
1) ���ڳ�����������Ľṹ�ص�����غ������������1.5 km���������������բ�ƶ�ϵͳ����ѧģ�ͣ���������բ��ѹ�ͻط�������ʵ����Խ�������˶Ա���֤��ͬʱ��AMEsim��Simulink�зֱ������ƶ�ϵͳ��Һѹϵͳ�Ϳ���ģ�͡�
2) ����ADAMS��AMEsim��Simulink�ȶ��������Ϸ��淽ʽ����������բ�ƶ�ϵͳ����Һһ�廯����ϵͳ������Ч�ض�����բ�ƶ�ϵͳ��չ����Һ�����о���
3) ��ƵĻ���Һϵͳ�������в���������Ч��������ƶ��ȶ����ƶ����и���ƽ�ȵĶ�̬���ܡ�
�ο����ף�
[1] ������, �ݴ�ǰ, ��ʤ��, ��. �ҹ�������ٽ��������[J]. ú̿��ѧ����, 2010, 38(7): 10-13.
HU Sherong, QI Chunqian, ZHAO Shengli, et al. Discussion on China deep mine classification and critical depth[J]. Coal Science and Technology, 2010, 38(7): 10-13.
[2] ALFRED C. Mine hoisting in deep shafts in the 1st half of 21st century[J]. Acta Montanistica Slovaca, 2002, 7(3): 188-192.
[3] ������, ������, �Ų���, ��. �ҹ�����ǧ���������е�ķ�չ����[J]. ��ɽ��е, 2012, 40(7): 1-6.
LIU Jinjun, ZOU Shengyong, ZHANG Bubin, et al. Discussion trend of domestic large hoisting equipments for deep shafts of thousands meters[J]. Mining & Processing Equipment, 2012, 40(7): 1-6.
[4] ������, ������, �Ų���, ��. ��������ʽ�����������ƶ����ٶȷ���[J]. ��ɽ��е, 2014, 42(10): 44-50.
LIU Jinjun, ZOU Shengyong, ZHANG Bubin, et al. Analysis on emergency braking deceleration of single-rope winding hoist[J]. Mining & Processing Equipment, 2014, 42(10): 44-50.
[5] ��ǿ. �������ƶ�ϵͳ��̬���Է��漰�����о�[D]. ̫ԭ: ̫ԭ������ѧ��е����ѧԺ, 2016: 45-65.
ZHAO Qiang. Simulation and experimental study on dynamic characteristics of hoist braking system[D]. Taiyuan: Taiyuan University of Technology. School of Mechanical Engineering, 2016: 45-65.
[6] ��۾�. ����������ȫ������Ӳ�����������ƶ�ϵͳ�о�[D]. ̫ԭ: ̫ԭ������ѧ��е����ѧԺ, 2013: 1-5.
MA Huijun. Research of mine hoist constant deceleration braking system[D]. Taiyuan: Taiyuan University of Technology. College of Mechanical Engineering, 2013: 1-5.
[7] BAO Jiusheng, LIU Jinge, YIN Yan, et al. Characterization and experiments on the friction catastrophe behaviors of brake material during emergency braking[J]. Engineering Failure Analysis, 2015, 55(9): 55-62.
[8] GRZEGORZEK W,  S. Prediction on friction characteristics of mine hoist disc brakes using artificial neural networks[J]. Scientific Problems of Machines Operation & Maintenance, 2011, 38(7): 27-42.
S. Prediction on friction characteristics of mine hoist disc brakes using artificial neural networks[J]. Scientific Problems of Machines Operation & Maintenance, 2011, 38(7): 27-42.
[9] �ܹ���. ��������˿��װ�س������ѧ��Ϊ�о�[D]. ����: �й���ҵ��ѧ���繤��ѧԺ, 2009: 5-12.
CAO Guohua. Impact dynamic behaviors of mine hoisting rope during loading process[D]. Beijing: China University of Mining and Technology. College of Mechanical and Electrical Engineering, 2009: 5-12.
[10] �����. ����Ħ������ϵͳ����ѧ�о��빤�����[M]. ����: ú̿��ҵ������, 2008: 16-21.
LI Yujin. Dynamics of multi-rope friction hoist system research and design[M]. Beijing: China Coal Industry Publishing House, 2008: 16-21.
[11] KACZMARCZYK S, OSTACHOWICZ W. Transient vibration phenomena in deep mine hoisting cables. Part 1: mathematical model[J]. Journal of Sound and Vibration, 2003, 262(2): 219-244.
[12] �����, ����ΰ, ����, ��. ����ADAMS�����Ŀ���������˿����ģ�о�[J]. ��ɽ��е, 2011, 39(12): 46-49.
JIN Minjie, LIU Huawei, PEI Pei, et al. Study on modeling of wire ropes of mine hoists based on ADAMS macro programs[J]. Mining & Processing Equipment, 2011, 39(12): 46-49.
[13] ������. ������˿����̬�����ķֶ����Ի��ⷨ[J]. Ӧ����ѧ�������ѧѧ��, 1996, 10(2): 35-43.
LIANG Zhaozheng. The segmented linear solutions of hoisting wire rope dynamic analysis[J]. Communication on Applied Mathematics and Computation, 1996, 10(2): 35-43.
[14] ����־, �����, ������. ����������ȫ�ƶ���ѹ��ȷ�������[J]. ú���е, 2004, 7(8): 13-15.
LIU Mingzhi, JIANG Hongjie, ZHANG Xinmin. Determination and adjustment of oil pressure of safe braking system of mine hoist[J]. Mining & Processing Equipment, 2004, 7(8): 13-15.
[15] ������, ���, ����, ��. ����Simulink�Ļ���Һϵͳ���ɻ�����ƽ̨�о�[J]. ϵͳ����ѧ��, 2008, 20(17): 4578-4581.
MA Changlin, LI Feng, HAO Lin, et al. Study of integrated simulation platform for mechanical electro-hydraulic system based on Simulink[J]. Journal of System Simulation, 2008, 20(17): 4578-4581.
(�༭ �²ӻ�)
�ո����ڣ�2017-05-29�������ڣ�2017-07-22
������Ŀ(Foundation item)�������ص�����о���չ�滮(973�ƻ�)��Ŀ(2014CB049402)(Project(2014CB049402) supported by the National Basic Research Development Program(973 Program) of China)
ͨ�����ߣ����գ���ʿ�������ڣ����¹���װ�����������о���E-mail��wg@csu.edu.cn
ժҪ��Ϊ�о�����������բ�ƶ�ϵͳ�ƶ����̵Ķ�̬���ܣ�������������ʽ�������ƶ�ϵͳ����ѧADAMSģ�ͣ�������ѹ�ͻط�������ʵ����Խ�����жԱ���֤��ͬʱ����Ը�˿������������ģ��Ϊ�����������ƶ�����ģ�ͣ���ɶ�����բ�ƶ�ϵͳ�Ķ���ѧ��ģ����������բ�ƶ�ϵͳ��Һѹϵͳ����ģ�ͣ�����Simulink�н�����Ӧ�Ķ����ƶ���������ƶ����Ʋ���ģ�͡���SimulinkΪ���ɻ��������ö��������Ϸ��淽ʽ��������բ�ƶ�ϵͳ�Ļ���Һһ�廯����ϵͳ�����ø�ϵͳ�������������·ų��ٹ����µĶ����ƶ��ͺ�����ƶ����ܽ��з����о����о������������Ƶ��ƶ�ϵͳ����Һ�������в���������Ч��������ƶ��ȶ����ƶ��Ķ�̬���ܸ�ƽ�ȡ�
[1] ������, �ݴ�ǰ, ��ʤ��, ��. �ҹ�������ٽ��������[J]. ú̿��ѧ����, 2010, 38(7): 10-13.
[3] ������, ������, �Ų���, ��. �ҹ�����ǧ���������е�ķ�չ����[J]. ��ɽ��е, 2012, 40(7): 1-6.
[4] ������, ������, �Ų���, ��. ��������ʽ�����������ƶ����ٶȷ���[J]. ��ɽ��е, 2014, 42(10): 44-50.
[5] ��ǿ. �������ƶ�ϵͳ��̬���Է��漰�����о�[D]. ̫ԭ: ̫ԭ������ѧ��е����ѧԺ, 2016: 45-65.
[6] ��۾�. ����������ȫ������Ӳ�����������ƶ�ϵͳ�о�[D]. ̫ԭ: ̫ԭ������ѧ��е����ѧԺ, 2013: 1-5.
[9] �ܹ���. ��������˿��װ�س������ѧ��Ϊ�о�[D]. ����: �й���ҵ��ѧ���繤��ѧԺ, 2009: 5-12.
[10] �����. ����Ħ������ϵͳ����ѧ�о��빤�����[M]. ����: ú̿��ҵ������, 2008: 16-21.
[12] �����, ����ΰ, ����, ��. ����ADAMS�����Ŀ���������˿����ģ�о�[J]. ��ɽ��е, 2011, 39(12): 46-49.
[13] ������. ������˿����̬�����ķֶ����Ի��ⷨ[J]. Ӧ����ѧ�������ѧѧ��, 1996, 10(2): 35-43.
[14] ����־, �����, ������. ����������ȫ�ƶ���ѹ��ȷ�������[J]. ú���е, 2004, 7(8): 13-15.
