
�������Ե���ѧϰ���Ƶ�������֫��֫ϵͳ
������1, 2��������1��������1������1�����˳�3
(1���ӱ���ҵ��ѧ���ƹ���ѧԺ�����300130��2���ӱ�ʡ���ƹ��̼����о����ģ����300130��
3���廪��ѧ�����������еѧϵ��������00084)
ժ Ҫ��
��һ���ܹ��������ڵĻ����˹ؽ�ϵͳ�����ݼ�֫�˶����ظ��Ժ��������ص㣬���������е���ʷ���ݣ���ȡ����ѧϰ���Ʒ�������������ߵ�ר��ϵͳ���п��ơ�Ϊ��������˶��е������ƫ����������������ص�ĵ���ѧϰ�����������ü�֫ϵͳ�˶��������������һ��ԣ�ȣ��������˶�����Ϊ����������ͣ��������ѧϰ�������ʵ��֤�����������Ե���ѧϰ���Ƶķ�������ʵ����������ܼ�֫����Ч����
�ؼ��ʣ�
���ܼ�֫���ؽ�������ѧϰ������������ר��ϵͳ��
��ͼ����ţ�TP18 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0524-06
Intelligent prosthesis system based on flexible ILC
LIU Zuo-jun1, 2, ZHAO Wei-zhao1, GEN Yan-li1, YANG Peng1, WANG Ren-cheng3
(1. School of Control Engineering, Hebei University of Technology, Tianjin 300130, China;
2. Control Engineering Center of Hebei Province, Tianjin 300130, China;
3. Department of Precise Instrument and Mechanics, Qinghua University, Beijing 100084, China)
Abstract: Intelligent prosthesis is a self-regulated robotic joint system. Iterative learning controller (ILC) was used to build up a decision-making expert system according to the repetition and periodicity in the motion of human prosthesis system. The historical data were used in ILC for optima control effect. As small error margin is permitted in prosthesis control, the motion of human can be divided into several sets, and a flexible ILC was proposed to solve the random error in human motion. The simulation and experiment show that the ideal control effect in the intelligent prosthesis system based on F-ILC can be achieved.
Key words: intelligent prosthesis; joint; iterative learning control; flexible; expert system
�ҹ�������֫�м���Լ600�Ը����ܵļ�֫���Ź㷺���������[1-2]�����ܼ�֫���о��漰���Զ����Ƽ����������˼������²��ϼ����뿵�����̼�������Ҫ����Ŀ�������������������幦�ܽӽ����ܶԶ�������Э�����Ƶ���һ����֫[3-6]�����ܼ�֫����������Ҫ�������ܹ�����ʵ�ʻ���������֫ϵͳ�IJ��������ɿ�����ɶ�������ˣ������Ա�������һ�����ֻ����ˣ����Խ�������˹ؽڼ������о��������п�����ơ�����ѧϰ����ILC(Iterative learning control)��1���Ƚ���ǰ�����Ʒ�����������ģ��������������ϵͳ[7]�������ݶ���Ŀ��ظ���̬��Ϊ��������Ϊ�IJ�����������ߣ�����ǰһ�λ�ǰ���β���ʱ��õ������Ϣ�������Ƶ����룬ʹ�ø��ظ���������һ�β������������ø���[8-9]��Ҳ����˵�����ο��ƿ��Կ�����ǰ���ο����ۻ������Ŀ��ƾ��飬����ϵͳ��������ظ�����������������Ӧ�Ŀ���Ҫ����ѧϰ����ϵͳֻ�����������źż����ظ����У��������ڶ�̬ϵͳ�ľ�ȷ��ѧģ�ͣ����Էdz��ķ�ʽ������ȷ����ǿ��Ϻ�α�����Եĸ���ϵͳ��������ǿ������ʵ��[10-11]����֫�˶���Ȼ���е��͵������ظ������������������ڲ����߱��ϸ���ͬ����ֹ���������������켣�����������ѧϰ���Ƶ�Ӧ�������������������ü�֫ϵͳ�˶�������һ�����ԣ�ȣ����1�־��������ص�ĵ���ѧϰ���Ʒ�����������ʷ�������ݽ�����֫���������ר��ϵͳ���õ��������ʵ��Ч����
1 ���ܼ�֫
����������ܻ���֫��������д��ѷ����1989�깫���Ļ���������������ʽ�ڶ�����Ƶ�ϥ�ؽ�[1]��1990�꣬Ӣ�������и��ع�˾��������������������ϵ�1��������֫��֫IP(Intelligent Prosthesis)��1995�����Ƴ����ܸ����Ƶ�IP+��2007����������Endolite���ܼ�֫���ձ�NABCO��˾Ҳ��1994�����Ƴ��ṹ������IP+��������֫��֫NI-C111��2000���������˵������ܼ�֫NI-C111t�����⣬�¹�Otto Bock��˾���Ƴ����ܷ�����C-LEG������Ϊ�������1����ȫ�ɵ��Կ��ƺʹ��д�����������ϥ�ؽ�ϵͳ��2005�꣬���ô�Ossur��˾�Ƴ��������ϵ�1�������ͼ�֫Power Knee[3-6]��
�ҹ���̨����ֹ�˾�ļ�֫��Ʒ�ھ�������ɵ��ڹ����⣬��½�ĸ���֫�������ҵ���Ҫ��Ʒ��Ȼͣ���������ζ�ʽ��Ħ��ϥ�ؽڡ����ֶ�����װ�õ�ϥ�ؽڡ��ζ�ʽ�����ƶ�ϥ�ؽڵȡ������ܻ���֫��֫���棬��δ�гɹ���ϵͳ��Ʒ��
Ŀǰ��������֫��֫�����ձ��ȡ����ʵʱ�������Ƶķ�ʽ����ִ�л����������е��ͺ������ ����������Ҫ��һ���Ƚϳ��ĵ��ڹ��̣���ɲ�̬��Ӧ�����Ͳ���Ȼ�Լ��뽡֫�˶���Э������������ƣ�͵����⡣
��������������ǻ��ڵ���ѧϰ����֪ʶ��Ŀ��Ʒ������Ⱥ���������֫ϥ�ؽ���������ͼ1(a)��ʾ������Ϊ�����˽ṹ������Ϊ0.8~1.2 kg�����ڲ������1������ɵ�������ǻ�壬��ͼ1(b)��ʾ���뷧�����ɲ����������˿����ɵĴ���ϵͳ���ƣ���ͼ1(c)��ʾ���ı��뷧���ȣ����ɵ��ڼ�֫ϥ�ؽڵ����ᣬ�������˶��ٶȣ��ﵽ�����彡֫�˶���Э����Ŀ�ġ�
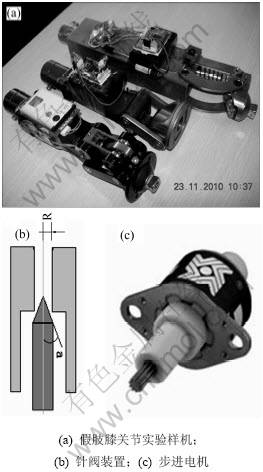
ͼ1 ���ܼ�֫����
Fig.1 Prototype of intelligent prosthesis
2 ����ѧϰ����
����ѧϰ��������Բ����ظ�ͬһ�켣���еĻ����ֵĿ��Ʒ�����ILC���������������ǰһ����ѭ�������е�ϵͳƫ�����Ӧ�Ŀ�������Ϣ��ʹ�õ�ǰ���ڵĿ��������Ż���ϵͳ�����Ӧ�������� С���ﵽ�ܸߵĿ��ƾ��ȡ����ڵ���ѧϰ���ƹ��̾��������¼���Ӧ������[7-9]������ѧ���ԵĿ��ظ��ԡ�����������ظ�һ���Ժ͵�����̬�̶����ڴ����� �£�����ѧϰ���Ƶ����⼴Ϊ������1������ϵͳ������ʱ������[0��T]�ϵ������켣yd(t)��Ѱ��1����������u(t)��ʹ���ڸÿ�������������ϵͳ�����y(t)������[0��T]�Ͼ����ܵظ���yd(t)��ѧϰ�ɵĵ�����ʽΪ[10-11]��
![]() (1)
(1)
![]() (2)
(2)
���У�k=0, 1, 2, ��������Ϊ����������yk(t)Ϊ����uk(t)ʱϵͳ����������ֿ���֮���Ա���Ϊ��1��ѧϰ��������Ϊ��������ͨ���ظ��ﵽ������Ϊ��ѧϰ��ʽ�� uk(t)ʵ���Ͽ��Ա������ǵ�k�ε�����ǰ���������Ŀ��ƾ��飬��U(ek(t), t)���ǵ�k�ε���ʱ��õ���Ч��Ϣ���������������Ŀ��ƾ���uk(t)������uk+1(t)��Ϊ�����Ŀ��ƾ�����������Ϣ���ۼӣ���洢�ڼ���ϵͳ�У���Ϊ��һ�εĿ������롣����ѧϰ���Ƴ��õ�PID��ѧϰ��һ����Ա�ʾΪ��
![]() (3)
(3)
ʽ�У�����L�ͦ�Ϊ�����������
����ѧϰ����ֻ��Ӧ�����ظ�ִ��ͬһ�̶������ϵͳ�У�����Ҫ����ÿ���������ڱ���߱���ͬ����ֹ�����Ͳ����켣��������֫�˶���ȻҲ�����ظ����������������Dz������ϸ�֤��֫ÿ����̬���ڵIJ����Ͳ��ٶ���ȫһ�£����ԣ�����Ե���ѧϰ���Ʒ����������������ʹ�á�
3 ��������ILC���ܼ�֫ϵͳ
3.1 ��֫��̬
��֫ϥ�ؽڵ��˶����е��͵��ظ��Ժ��������ص㣬��������˹ؽں�������������ILC���Ƶijɹ������ÿ��Ƶ���ʷ���ݣ������彡֫ϥ�ؽ��˶��Ƕ���Ϊ���ƵIJο������ѧϰ����������֫�ο�����֫ѧϰ��ÿһ����������ǰһ����ѧϰ���ƾ���֮�ϣ����ظ��˶��жಽ������ʵ�������������̡����ǣ����ĵ���ѧϰ����Ҫ��ϵͳÿ���������ڱ���߱���ͬ����ֹ���������������켣������ʵ��Ӧ���У����������˶��������ⲿ�����ĸ������أ���֫ϥ�ؽ���ÿ����̬���ڵIJ����Ͳ��ٲ�������ȫһ�£��������ϸ��������ѧϰ���Ƶ�ʹ����������ˣ�������Ե���ѧϰ���ƵIJ��ԡ����������˶�������һ����ΧС��������������������ȡ��������ѧϰ������ѧϰ�����ķ�ʽ�����������������ص�ĵ���ѧϰ������������ѧϰ��õĿ��ƾ��齨��֪ʶ�⣬ʵ�ֶ�ϥ�ؽڵ������ơ�
3.2 ���Ե���ѧϰ���Ʋ���F-ILC
���Ե���ѧϰ���������Եĺ������2����Σ�һ���Ǹ��ݲ�ͬ�������˶�ģʽ������������ѧϰ�Ϳ��ƣ��Դﵽ�����Ӧ��ͬ�˶�ģʽ�µļ�֫ϥ�ؽڿ���Ҫ����һ������ϥ�ؽ��˶����ƾ���ĵ���ѧϰ�����У�������ƫ��������Ҫ��Χ���Ժ�ͨ�����������ķ�ʽ���㷨ֹͣ����ѧϰ�������������˶���ÿ��֮����ڵIJ���ȫһ������������ѧϰ��ɢ���Դﵽ���˷���Сƫ����㷨��Ӱ�졣
��֫����װ���֫���ڽ���һЩ��ƽ�ز��С�����¥�ݵȵ���ѵ��������ͬ�˶�״̬�Ͳ�ͬ����2����Ԫ��Ϊ����A={��¥�ݣ���¥�ݣ�ƽ��}�ͼ���B ={���٣����٣�����}��ȡ2�����ϵĵѿ�����D=A��B={(��¥�ݣ�����)��(��¥�ݣ�����), ��}�����ָ��ֲ�ͬ�IJ�̬���ࡣÿ�ֲ�̬�¾�������һ�µ����������켣��������һ�����ƾ���Ҫ���ڣ�������е���ѧϰ��
��������ͬ�IJ�̬ģʽ�½��з���ѵ��������֫���˶���Ϣ�ӳٰ����̬������Ϊ��֫���Ƶ�ѧϰ�������ֱ�Բ�ͬ�������ͨ������ѧϰ��ø�������µĿ��ƾ��飬������Ӧ��֪ʶ�⣬��ͼ2(a)��ʾ��ʵ��ʹ��ʱ���ڴ�����֫���ߵĹ����У����ò�֫�����źŴ�������ϥ�ؽڽǶȴ���������֫С�ȹ���ѹ���������ȼ���жϳ�������ִ�е��˶�ģʽ������֪ʶ���о��������Կ������Ʒ�ʽ�����ʹ��֫�ﵽ������Ӧ��ͬ�˶�״̬��Ч������ͼ2(b)��ʾ��
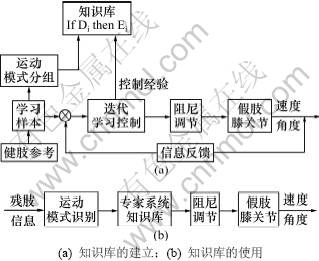
ͼ2 ���ڵ���ѧϰ���Ƶ����ܼ�֫ר��ϵͳ
Fig.2 Expert system based on ILC
����ÿһ�ֲ�̬ģʽ�ķ����ģ�������ϵģ���ÿһ���˶�ģʽ����綨�ķ�Χ�ڣ�ֻѡȡ�д����Ե��˶���������ѧϰ����ʵ���˶��������ֹ涨ģʽ����ƫ���ˣ���ϵͳ���ȴﵽҪ��ƫ������һ����С�ķ�Χ�ڵ�ʱ���趨һ��ѧϰ�����������ⲿ��ƫ���Ӱ�죬���ٽ��е���ѧϰ������ʱ�Ŀ���������Ϊ����洢��֪ʶ���С����������е���ѧϰ����������ѧϰ�����㷨������Ӧ���������ƶ�ʹϵͳ��ɢ��
��֫ϵͳ��Ȼ���˶������о���һ���������Ժ��ظ���������������·�治ƽ������ڶ���ԭ����Щ�����������ϸ��������ѧϰ��������ʹ�����������ڶ������ķ���ȫһ���ԣ���ʹ����ͬһѧϰ���������У������ظ��������̱˴˼��Դ�����һ��ƫ���ˣ��ڲ�ȡPID����ѧϰ�㷨ʱ���������Ӳ�������ϵͳ�в�������������һ���̶�ʱ��������Ҳ����ǰ�����й켣֮��IJ��������������ˣ��˴�ֻ����P��ѧϰ�ɣ�������ȶ���������
![]() (4)
(4)
ѧϰ����L����ᵼ���㷨�ķ�ɢ�����Ϊ��֤�㷨��������֤���ƾ��ȵ�Ҫ��ѧϰ����L��ѧϰ����ea֮��Ӧ�������µĺ�����ϵ��
![]() (5)
(5)
Lea<0.5��Umin (6)
���У���UminΪ��С�Ŀɵ��ڿ���������ӦΪ��֫�ؽ�������ڲ��������һ����ѧϰ����Ӧ����ƾ���Ҫ����һ�¡���������ٴ����飬��֫�뽡֫�˶���ÿ��ʱ���С��10%���ɴﵽЭ���˶��Ļ���Ҫ��eaȡֵΪ0.1 T��(���У�TΪ��֫ÿ�����õ�ʱ��)��Ӧ��ѧϰ����L����ȷ�������ַ�ʽ�����ڴ���һ�µIJ�̬�½��е���ѧϰ�����������Ӧ����̬����ڵ�С����ƫ�����Ϊ���Ե���ѧϰ������F-ILC��
����ר��ϵͳ�Ŀ���Ч����Ҫȡ����֪ʶ�������洢֪ʶ�����ȷ�ԡ��Կɵ��������֫Ϊ�������ּ�֫��ͬһ�˶��ٶȺ�״̬�µİڶ��������ǹ̶��ģ�ֻ�е��˶��ٶȺ�״̬�����仯ʱ��������ŵ��ڵ���һ��ֵ����Զ��ԣ�����ںͿ�������ʵ�֣�Ŀǰ�����ܼ�֫��Ʒ���������һ�ࡣ�ڹ����֫�ؽ�ר�ҿ�����֮ǰ��Ҫ�ȸ��ݿ�������ʦ�ľ�������רҵ֪ʶ���ڽ�֫��װ���֫ʱ��ͨ��������ε�ϸ�¹۲졢ѯ�ʺ͵��ڣ�ȷ����һ�˶��ٶȺ�״̬�����������Ӧ���뷧���ȣ�������֪ʶ������д1������֪ʶ��������������У���������ʦ�ͼ�֫�����߶���������������ģ���о��������жϵ���Ч���ģ�֪ʶ��ȷ��ȱ�ٿɿ��Ķ������۱�����Ϊ���ӵ��ǣ�����֪ʶ�⣬��Ҫ�ڲ�ͬ���ٺͲ�ͬ�˶�״̬�µIJ�֪ͬʶ�������ĵ�ʱ�����������⣬��ͬ��֫�ߵ�֪ʶ����ܹ����������������ͨ�����Ե���ѧϰ���Ƶķ������Զ�ѧϰ��ü�֫���Ƶľ���֪ʶ�����Դ�����̼�֫�����ߵ��Դ�ѵ��ʱ�䣬��߿��ƾ����ȷ�ȣ����Ϳ�������ʦ���Ͷ�ǿ�ȡ�
4 ϵͳʵ��
4.1 �������
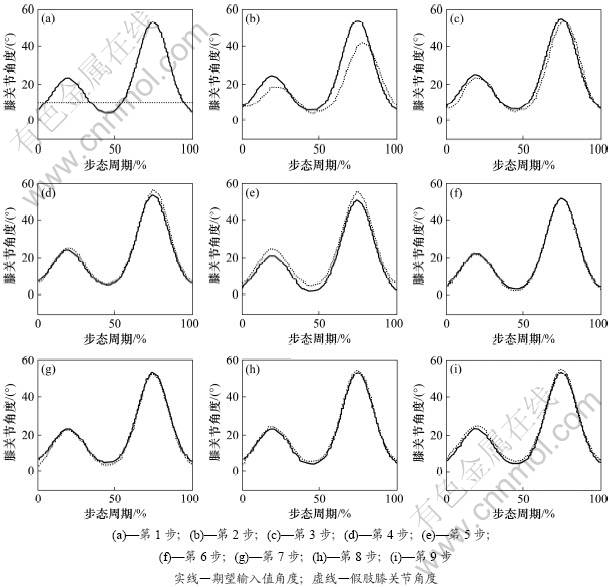
����������ƽ�����ߵ��˶�״̬Ϊ�����������Ե���ѧϰ���Ƶ����ܼ�֫������ͼ3��ʾ��ͼ��ʵ�߱�ʾ����֫ϥ�ؽڽǶ��ͺ�����̬���ں����������yd(t)������֫��ѧϰ��������2��ָ��������϶��ɡ�Ϊ���������˶��е�����ԣ�����̬�����о����ӻ����һ��������Ŷ�����ͼ3�����ߴ�����֫ϥ�ؽڽǶ�y(t)�����Ƶ�Ŀ����ʹ���y(t)�����ܵظ���yd(t)����ͼ3��֪��Ӧ�����Ե���ѧϰ�ķ������ڵ�4������ʵ�ֽ�����ĸ��١������ڱ�ѧϰ�����к�������Ŷ������ԣ�ֻ���������Ƹ��٣�����֮���Դ�����һ�������ڵĸ���ƫ�
������ÿһ����̬�����еĹؽڽǶ�ƫ����ͼ4(a)��ʾ������������ľ����������ͼ4(b)��ʾ����ͼ4���Կ������ڵ�4�εĵ���ѧϰ�ؽڽǶȵ������������3�����ڣ��ﵽ��֫ϵͳ�����Ժ�Э����Ҫ����Ҫע����ǣ����ڶ�������������Ŷ���ƫ��ֻ�Ǽ�С��һ��������ƾ���Ҫ��ķ�Χ֮�ڣ�������������Ҳ�����ǵ����ģ���ʱ�㷨�ѿ���ֹͣ��������ѧϰ������ص�ѧϰ������������ܼ�֫��֪ʶ��洢���У�����������̬�Ŀ��ơ�
4.2 ʵ��Ч��
���ڿɵ���������Ƽ�֫���˶����ƣ���֧���ڽ��뷧����Ϊ�ر��Ա���������ᣬ��ֹ������ˤ �����ڶ���ʱ��ĵ�����ʾ�����ٶȣ�����֫���֮֫��İڶ���ʱ�䵹������Ϊ����ѧϰ�����㷨�����룬�ڶ��ڵij���ʱ�����ͨ��С�ȹ��ڵ�ѹ���������������ѹ���źŵ������Զ�����ó����������������ת������Ϊ����ѧϰ�����㷨�Ŀ������������Ե��͵�ƽ���������߲�̬����ѧϰ����ƽ������5�����¼ѧϰ���������Ϊ֪ʶ���еĿ��ƾ�����б��档�������������ʱ��ר�ҿ���ϵͳֱ���Կ�����ʽ���ǰ������¼��֪ʶ�����ɴﵽ������ȻЭ���IJ�̬Ч����
���ڿɵ���������Ƶļ�֫���˶�ˤ����ͬ���ڼ�֧֫���ڽ��뷧����Ϊ�ر��Ա���������ᣬ�ڰڶ������ǽ���֫���֮֫���ϥ�ؽڽǶȲ���Ϊ����ѧϰ�����㷨�����룬�������������ת������Ϊ����ѧϰ�����㷨�Ŀ�������������ڿɵ�����������ͼ�֫�ĵ�����Ը��ӣ����û������Ե���ѧϰ���Ʒ�����Ȼ����ȡ��һ���Ŀ���Ч���������������ϵĿ����ԣ���������װ�ñ�����е�ṹ�ӹ����Ⱥ����ò��������Ӧ�ٶȵ�ԭ������ƣ�ʵ���Ч���Կɽ�һ����ߡ�
ͼ3 �������Ե���ѧϰ���Ƶ����ܼ�֫����
Fig.3 Simulation of intelligent prosthesis based on F-ILC
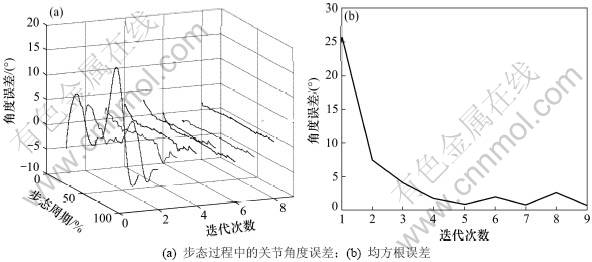
ͼ4 �ؽڽǶ�ƫ������
Fig.4 Curves of error in F-ILC
5 ����
����ѧϰ�����ڻ����ˡ����̿��Ƶ�������о���Ӧ���ж���������õ�Ч�����ڶ����ܼ�֫ϵͳ�ص���з����Ļ����ϣ��ӻ����˹ؽڿ��ƵĽǶȳ�������������Եĵ���ѧϰ���Ʒ�������������õĿ��ƽ�������нϺõ����Ч�档
�ο����ף�
[1] Jonkers I, Spaepen A, Papaioannou G, et al. An EMG-based muscle driven forward simulation of single support phase of gait[J]. Journal of Biomechanics, 2002, 35(5): 609-619.
[2] Vojislav K D, Dejan P, Nils T S. Feedback error learning neural network for trans-femoral prosthesis[J]. IEEE Trans on Rehabilitation Engineering, 2000, 8(1): 71-80.
[3] ̷����, ������. �������˹��ȼ�֫�о��Ľ�չ����չ����[J]. ������, 2001, 23(1): 91-96.
TAN Guan-zheng, WU Li-ming. Progress and development trend towards study of artificial legs (prostheses) in foreign countries and China[J]. Robot, 2001, 23(1): 91-96.
[4] Dario F, Roberto M, Marisa N, et al. Effect of joint angle on EMG variables in leg and thigh muscles[J]. IEEE Engineering in Medicine and Biology, 2001, 20(6): 62-71.
[5] �����, ���ֺ�, �żô�. ���������о����½�չ[J]. �й�����ҽѧ��־, 2001, 16(6): 328-330.
JIN De-wen, JI Lin-hong, ZHANG Ji-chuan. New development in rehabilitation engineering research[J]. Chinese Journal of Rehabilitation Medicine, 2001, 16(6): 328-330.
[6] Ossur official website [EB/OL]. [2011-04-30]. http://ossur.com.
[7] Longman R W. Iterative learning control and repetitive control for engineering practice[J]. International Journal of Control, 2000, 73(10): 930-954.
[8] SUN Ming-xuan, WANG Dan-wei. Iterative learning control design for uncertain dynamic systems with delayed states[J]. Dynamics and Control, 2000(10): 341-357.
[9] Cao Z, Ledwich G F, Adaptive repetitive control to track variable periodic signals with fixed sampling rate[J]. IEEE Transactions on Mechatronics, 2002(7): 378-384.
[10] �����, �Դ���. ����ѧϰ������״��չ��[J]. �Զ����DZ�, 2005, 26(6): 1-4.
HU Yu-e, ZHAI Chun-yan. Current status and expectation of iterative learning control[J]. Process Automation Instrumentation. 2005, 26(6): 1-4.
[11] ������, ��ʿ��, ����, ��. �������Ե���ѧϰ���ƺͷ��������Ŀյ�ϵͳ���ܲ���[J]. �ӱ���ҵ��ѧѧ��. 2009, 38(3): 59-64.
LIU Zuo-jun, REN Shi-rong, YANG Peng, et al. Study on energy saving of air conditioning system based on flexible ILC with feedback compensation[J]. Journal of Hebei University of Technology, 2009, 38(3): 59-64.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ�����ҿƼ�֧�żƻ�������Ŀ(2009 BAI71B04)
ͨ�����ߣ�������(1971-)���У�ɽ�������ˣ���ʿ�����ڣ��������ܻ������о����绰��13820694456��E-mail: nankailzj@yahoo.com.sg
ժҪ�����ܼ�֫�ɿ�����һ���ܹ��������ڵĻ����˹ؽ�ϵͳ�����ݼ�֫�˶����ظ��Ժ��������ص㣬���������е���ʷ���ݣ���ȡ����ѧϰ���Ʒ�������������ߵ�ר��ϵͳ���п��ơ�Ϊ��������˶��е������ƫ����������������ص�ĵ���ѧϰ�����������ü�֫ϵͳ�˶��������������һ��ԣ�ȣ��������˶�����Ϊ����������ͣ��������ѧϰ�������ʵ��֤�����������Ե���ѧϰ���Ƶķ�������ʵ����������ܼ�֫����Ч����
