
�������������ϵͳ�������ṹ����
��ҫ��1����Ӧ��1���ܷ���2
(1. ɽ����ͨѧԺ ��Ϣ����ϵ��ɽ�� ���ϣ�250357;
2. ɽ����ѧ ���ƿ�ѧ�빤��ѧԺ��ɽ�� ���ϣ�250061)
ժ Ҫ��
����ϵͳ�����һ�ֻ��ڷ��������绬ģ��ṹ���Ʒ������÷���ͨ��������ƽ�ϵͳ������ƽ����ָ��������֮��ĺ�����ϵ��ͬʱ����˫�����м���������ṹ�����еı��ͺ�����ʵ�ֱ�ṹ���Ƶı߽�㷨��ƣ�����˽��������ṹ�����еĶ��������������ÿ��Ʒ����������õ���Ӧ�Ժ�³���ԡ�
�ؼ��ʣ�
�����������������ṹ������������������������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0036-05
Neural network variable structure control for ship course nonlinear system
HAN Yao-zhen1, ZHOU Ying-bing1, ZHOU Feng-yu2
(1. Department of Information Engineering, Shandong Jiaotong University, Jinan 250357, China;
2. School of Control Science and Engineering, Shandong University, Jinan 250061, China)
Abstract: A back propagation network sliding mode variable structure control method is proposed for ship course nonlinear control. Neural network is used to simulate the functional relation between the state hyperplane of the system and the exponential reaching law. A hyperbolic tangent function is applied to replace the saturation function to realize the boundary method of the variable structure control. Chattering is greatly reduced and the results of simulation demonstrate the presented control method has good adaptability and robustness.
Key words: ship course nonlinear; variable structure control; back propagation network; reaching law
20����20�����70���������PID�㷨������Ӧ���ƵĽ����Զ���ֱ���Ƴ������ڽ����������[1]�������˶����д���ԡ������Ե��ص㣬���ټ�װ�صı仯����ģ�Ͳ����㶯�������з�Դ��������������ӱ䶯�����������´�λƯ�ƣ�����ɽ�������ǵĸ�Ƶ�仯�ʹ�λ��ƵƯ�ƣ��Լ����������ı仯���������������ظ��ŵȶ�ʹ�����˶�������ȷ���ԣ�ʹ��PID������Ӧ���Ƽ����ڽ����������Ӧ�����ܵ�������[2]��������µĿ����㷨[3]��H��³�����ơ�Ԥ����ơ���ȷ�������Ի�������������������ơ�ģ�����Ƶ������Ӧ���ڽ���������ƣ�ȡ����һ����չ����Ҳ��¶��һЩ���⣬�磺H�����ơ�����Ԥ����ơ���ȷ�������Ի����������ȶԿ��ƶ���ģ��Ҫ��ϸߣ��㷨���ױ����������Ա���գ���������Ƶķ��������д��ڽ�һ���о������Ƶ��걸������δ�������ģ�����ƵĹ������ֱ�����У������ƹ����ȷ�����Ż������������ѡ�Ϊ�˽���������⣬��Ҫ��һ�������ܿ��Ƽ������뵽������������У��о�����͵������Զ���[4]���罫PID��ģ�����ƽ�ϡ�PID����������ƽ�ϡ�ģ����������������ƽ�ϡ�ģ���������Ŵ��㷨��ϡ�������������Ŵ��㷨��ϵȣ�����Ӧ����������Ƶ�Ҫ����ּ���о������ڽ���������Ƶ������绬ģ��ṹ����������ṹ������Ϊһ�ַ����Կ��ƣ��볣����Ƶĸ����������ڿ��ƵIJ�������[5]��������һ������Ļ�ģ���Ʒ�ʽ��ǿ��ϵͳ��״̬����������Ϊ�涨����켣���������㡣��ģ��ṹ���������ڴ���δ֪�����ԡ������źͲ����㶯�IJ�ȷ��ϵͳ���н�ǿ��³���ԣ����һ���ģ̬���㶯�IJ����������ڿ���ϵͳ��ơ���������������£������������л��������κ�ʱ��Ϳռ��ͺ�ϵͳ�ڻ�ģ�ϵ��˶������ܸ��ŵ�Ӱ�죬���������˶���������ԭ�㡣��������[6-7]��������Դ�������ģ���Ƶ��о������ǣ���ʵ�ʿ��������У��������ڽ����л�ʱ���ɱ���ش���ʱ���ͺ����ϵͳ״̬Χ�ƻ�ģ�Ķ��������ҿ������л�����Խ����Խ���ԣ���ˣ��б�Ҫ�о���������������ķ�����Ϊ�ˣ��������������һ�ַ���(Back-propagation, BP)�������ṹ���Ʒ���������BP��������������ṹ���Ƶ��л��������棬ͬʱ�����������˫�����м�����������л������еı��ͷ����Բ��֣���Խ������������ϵͳ���з���ʵ�飬����˱�ṹ���ƵĶ���Ҳ��ȡ�úܺõĿ���Ч����
1 �����˶���������ѧģ��
1957��Nomoto�ڻ��ڲ������Է��̵Ļ����ϣ��ӿ��ƹ��̵Ĺ۵��о��������������⣬����˱������������Ե�ָ��T��K�����������Դ���������Ӧ��ѧģ��[8]��
![]() (1)
(1)
ʽ�У�T1��T2��T3Ϊ����Nomotoģ�͵����Բ�����ָ����KΪ�����Բ�����ָ�����ڵ�Ƶʱ��ʽ(1)���Լ�Ϊһ��Nomotoģ�ͣ�
![]()
![]() (2)
(2)
���У�![]() Ϊ����
Ϊ����![]() Ϊ��ǣ�K��0ʱ���������ȶ���
Ϊ��ǣ�K��0ʱ���������ȶ���
���ǵ�������һ�ִ���Ե��˶����壬�䶯̬����ֻ�ڵ�Ƶ������Ҫ�ģ���������Զ���Ŀ�����һ���ǻ���һ�����Nomotoģ�ͽ�����ƣ���Nomotoģ����һ������ģ�ͣ�ֻ�����ڽ�������Ϊ��������ƽ��λ����Сƫ�ƵIJ����˶������ں���ı�������漰���ǣ����������صķ����ԡ�Ϊ�����ģ���������ȣ��÷�������![]() ����ʽ(2)�е�
����ʽ(2)�е�![]() ���������������Բ������ԣ�
���������������Բ������ԣ�
![]() (3)
(3)
ʽ�У����ڶԳƴ���Ľ�����![]() ��������
��������
![]() (4)
(4)
�����ȶ��Ľ�����n1=1�����ڲ��ȶ��Ľ�����n1=-1��n3���ɻ�ת����ȷ������ʽ(4)����ʽ(2)�ɵã�
![]() (5)
(5)
�������Խ��������Ӱ��dz����ӣ�ȷ��������ѧģ�ͼȲ����ܣ�Ҳû��Ҫ��ͨ������ͨ����Ч���������������Դ��������Ӱ�죬��Ҫ��������[9]��ֱ�����Ų��ֵ�Ӱ���൱����1����ֵ��������ڽ�����ʹ�����Ժ㶨�����ʳ�1������ת�������Ը��Ų��ֵ�Ӱ���൱����1�����ڱ仯�Ķ�������ڽ�����ʹ��������������Ե����Ұڶ���ͨ���������Ҳ�֮�ͽ��Ƶ�Ч�� ���硢�������˵�Ӱ��ĵ�Ч��Ǽ�����Ϊ��
![]() (6)
(6)
ʽ�У�![]() Ϊ��Ч���Ŷ�ǣ�
Ϊ��Ч���Ŷ�ǣ�![]() ��
��![]() �ֱ�Ϊ��Ч�������Ը��Ŷ�ǵķ�ֵ�ͽ�Ƶ�ʣ�
�ֱ�Ϊ��Ч�������Ը��Ŷ�ǵķ�ֵ�ͽ�Ƶ�ʣ�![]() Ϊ��Ч�ij�ֵ���Ŷ�ǡ�
Ϊ��Ч�ij�ֵ���Ŷ�ǡ�
���ǵ������ں����г��ܵ���ȷ���������ţ�����ƥ�䲻ȷ����Ľ����˶���ѧģ��Ϊ��
![]() (7)
(7)
![]() Ϊ�����Ų�ȷ���ԣ����Ҽ������������н�ģ�
Ϊ�����Ų�ȷ���ԣ����Ҽ������������н�ģ�![]() ��J��J��δ֪��������
��J��J��δ֪��������
ѡȡ״̬����![]() ,
, ![]() ,���Ʊ���Ϊ
,���Ʊ���Ϊ![]() �������������������ż���ȷ���ԵĽ�����������Կ���ϵͳ��ѧģ��Ϊ��
�������������������ż���ȷ���ԵĽ�����������Կ���ϵͳ��ѧģ��Ϊ��
![]()
 (8)
(8)
2 �̶������ṹ�����������
��Խ������������ϵͳ(8)��ѡȡ�л��棺
![]() (9)
(9)
ʽ�У�ѡ��������c1ʹ֮�������ά�Ķ���ʽ���ã�
![]() (10)
(10)
��![]() =0����������л����ϵ�Ч������ueq��
=0����������л����ϵ�Ч������ueq��
![]() (11)
(11)
���ڱ�ṹ����ϵͳ�������������2������ɣ�һ�����������ι�����ʹϵͳ���뻬����ƽ�������������uvss����һ������ϵͳ�ڻ�����ƽ�����˶��ĵ�Ч������ueq�����ṹ������ȡΪ��
![]() (12)
(12)
ʽ�У�![]() ��kΪ����0��ʵ�����������ָ�������ɣ�ͨ����������ϵ��������Ч������������������[10]�и����Ķ���֤��������ʽ(8)����������ϵͳ������ʽ(12)��������ʾ������������ģ̬���ڲ��ҿɴ
��kΪ����0��ʵ�����������ָ�������ɣ�ͨ����������ϵ��������Ч������������������[10]�и����Ķ���֤��������ʽ(8)����������ϵͳ������ʽ(12)��������ʾ������������ģ̬���ڲ��ҿɴ
��ṹ�����еIJ�����������Ҫ˲ʱת����ʹϵͳ״̬�����ڻ����ϣ���ʵ��ʱ����ִ���������ơ������ӳ١�������ӳ��Լ��������ص�Ӱ��ʹ�����뻬�����Բ�����ϵͳ״̬�Է�����Խ���������ʽ�˶���ԭ�㣬�����Ƕ��������ԭ��Ϊ�˷�����ȱ�㣬�ڱ�ṹ����������߽��ĸ���ñ��ͺ���������ź�������ͨ�������������������������������IJ��ñ߽��˼�룬ͬʱ���ڱ��ͺ����������������˫�����м�������档
3 ��������������ı�ṹ�����ʵ����
������������������ɵ�һ��ϵ��![]() ��ͬʱ������ļ��������˫�����к������ú����뱥�ͺ���������״����������ּ����������ź�����ʵ���л�������������(�ֳ�Ϊ�߽�㷨) [11]������ͬ������������������
��ͬʱ������ļ��������˫�����к������ú����뱥�ͺ���������״����������ּ����������ź�����ʵ���л�������������(�ֳ�Ϊ�߽�㷨) [11]������ͬ������������������
ָ�������ɵ���ʽΪ��
![]() (13)
(13)
���У�![]() ��0��k��0��ָ�������ɵĵ�1���Dz������ٶ����2���Dz������ٶ��ͨ������
��0��k��0��ָ�������ɵĵ�1���Dz������ٶ����2���Dz������ٶ��ͨ������![]() ͬ�����Ըı�״̬�������ٶȡ�
ͬ�����Ըı�״̬�������ٶȡ�
��s��0ʱ����ʽ(13)�ɽ�ã�
![]() (14)
(14)
���У�s0Ϊϵͳ״̬�ij�ʼֵ����ϵͳ״̬�ڸ���������ʱ��![]() ���ɸ�״̬������״̬�������������ʱ����s�ͱ����
���ɸ�״̬������״̬�������������ʱ����s�ͱ����![]() ��һ������������
��һ������������
![]() (15)
(15)
����![]() ��
��![]() ������
������![]() Ϊ��������ָ�꣬kΪ����������ˣ�s�Ϳ��Կ���
Ϊ��������ָ�꣬kΪ����������ˣ�s�Ϳ��Կ���![]() ��һ�����Ժ�����
��һ�����Ժ�����
ͬ������s��0ʱ���ɵã�
![]() (16)
(16)
ʽ�У�![]() ��
��![]() ��
��
�ɵõ���
![]() (17)
(17)
ʽ�У�![]() ��
��![]() ��
��![]() ��
��![]() ��
��
���õ����뵥��������������ƽ���ʽ(17)��ʾ�����Թ�ϵ�����������������ϵͳ���л�ƽ�棬���Ϊָ���������е�һ���ٶ������档����������ĽṹΪ�����뵥�����ʽ��������á�S���ͺ����е�˫�������ͺ����������ʽΪ��
![]() (18)
(18)
˫�����м������������״�뱥�ͺ�����������״�����ͨ������![]() ���Ըı䱥�ͺ����������Ŀ��ȣ����ı��˱߽��ĺ�ȡ���
���Ըı䱥�ͺ����������Ŀ��ȣ����ı��˱߽��ĺ�ȡ���![]() ����һ��ֵʱ��˫�����м�������Խ�����Ϊ���ź�����ͬʱ���ֱ�����ԭ�����������ԣ���ˣ������������汥�ͺ�������ź������ܸ���Ч��������
����һ��ֵʱ��˫�����м�������Խ�����Ϊ���ź�����ͬʱ���ֱ�����ԭ�����������ԣ���ˣ������������汥�ͺ�������ź������ܸ���Ч��������
������������㷨������һ���ڵ�ʦָ���£��ʺ��ڵ��������Ԫ�����ѧϰ��ʽ����ԭ���ǽ������ݶ��½����Ļ���֮�ϣ��������Ժ����ıƽ�ֻ���õ����뵥����ĵ���������ģ�ͼ���ʵ�֡�
����Ԫ�����Ϊ![]() ������
������![]() ��mΪ����ά�������ö���������ָ��ʵ�ֶ��������Լ�����ơ�
��mΪ����ά�������ö���������ָ��ʵ�ֶ��������Լ�����ơ�
![]() (19)
(19)
���У�nΪ���ʸ����ά����Ϊ��ʹE(W)��С�����������
![]() (20)
(20)
��ˣ�
![]() (21)
(21)
BP�㷨��һ����Ҫ��ʦ�����źŵ�ѧϰ�㷨��������ݱ�ṹ���Ƶ��ص��������������ݡ�����ָ�������ɣ��������ٶ�ȡ����![]() ��k������
��k������![]() ��������Ӧ��ȡ���㹻��������ϵͳ�IJ�ȷ���Բ���֤ϵͳ�ĸ�³���ԣ�������ʵ�ʿ������������������ģ�����
��������Ӧ��ȡ���㹻��������ϵͳ�IJ�ȷ���Բ���֤ϵͳ�ĸ�³���ԣ�������ʵ�ʿ������������������ģ�����![]() ��������ʹ���������ͼ�����������ˣ�����ȡ�����������Բ���������Ͻ�
��������ʹ���������ͼ�����������ˣ�����ȡ�����������Բ���������Ͻ�![]() ��Ϊ�������ݵ��Ͻ磬ȡһ����С������
��Ϊ�������ݵ��Ͻ磬ȡһ����С������![]() ��Ϊ���½磬��
��Ϊ���½磬��![]() �����������˽�ʦ�źŵ������Χ�����������źŲ���״̬�źŵĶ�������Ϊ������
�����������˽�ʦ�źŵ������Χ�����������źŲ���״̬�źŵĶ�������Ϊ������![]() �����������������ȡ��ͬ����������������ѵ�������磬ͬʱҪע����
�����������������ȡ��ͬ����������������ѵ�������磬ͬʱҪע����![]() ��С������ȡ��С��
��С������ȡ��С��![]() ����֤��������������
����֤��������������![]() �ϴ������ȡ�ϴ��
�ϴ������ȡ�ϴ��![]() ����֤�Ͽ�������ٶȡ����ַ�������ϵͳ״̬����������ƽ���ʱ���Dz����ģ��䵽��ʱ������ѡ�����������йء�
����֤�Ͽ�������ٶȡ����ַ�������ϵͳ״̬����������ƽ���ʱ���Dz����ģ��䵽��ʱ������ѡ�����������йء�
4 �����о�
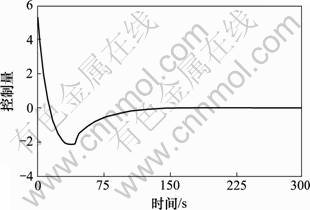
��ij����[12]Ϊ�����з����о����ô�����LΪ160.9 m������BΪ23.2 m����ˮ���dΪ7.467 m������ϵ��CBΪ0.588������ʱȡ����v=8.3 m/s��n3=23��n2=0��n1=1��n0 =0����ʱ��T1=72.49��T2=8.54��T3=17.61��K=0.114 1��T=63.42��������������Ų��õ��ǽ��������Խ����ĸ��ŵ�Ч�ɸ��Žǣ���ȷ����![]() ���÷������ۺϾ���������š��̶������±�ṹ������������Ʒ�������ͼ1��ͼ2��ʾ����ͼ1���Կ����������ܽϿ���ȶ��ڸ����ĺ�����ϡ���ͼ2���Կ�������ṹ��������������ڽϴ������ؽ����˿��������ܣ���ʵ�ʵ�ִ�л���Ҳ������ܴ����ˡ�
���÷������ۺϾ���������š��̶������±�ṹ������������Ʒ�������ͼ1��ͼ2��ʾ����ͼ1���Կ����������ܽϿ���ȶ��ڸ����ĺ�����ϡ���ͼ2���Կ�������ṹ��������������ڽϴ������ؽ����˿��������ܣ���ʵ�ʵ�ִ�л���Ҳ������ܴ����ˡ�
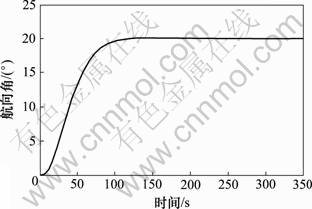
ͼ1 �̶�����ĺ������
Fig.1 Output of course angle when gain is fixed
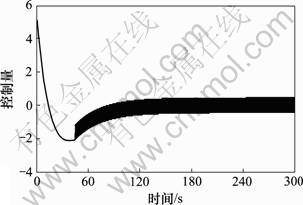
ͼ2 �̶�����ı�ṹ���������
Fig.2 Output of variable structure controller when gain is fixed
����BP��������ڱ�ṹ���Ƶ������ʶ���ƵĿ�����Ӧ���ڽ���������Ʒ�������ͼ3��ͼ4��ʾ���ɼ�������������ܲ�δ���Խ��ͣ�����ṹ�������Ķ�������õ�������ơ�
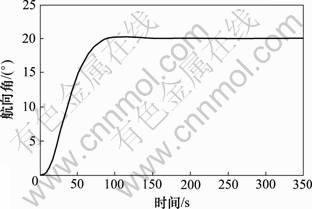
ͼ3 ����BP������Ĵ����������
Fig.3 Output of course angle based on BP neural network
ͼ4 ����BP������ı�ṹ���������
Fig.4 Output of variable structure controller based on BP neural network
5 ����
�����˽�����������Կ�����ѧģ�ͣ������һ�ֻ���BP�������ṹ��������������Ӧ���ڽ���������ơ��������������ÿ��Ʒ����ȱ����˱�ṹ����ϵͳ�ĸ�³���ԣ��ּ���������˱�ṹ�����еĶ�������
�ο����ף�
[1] ����, �ϴ���, ���, ��. ������������Կ���ϵͳ�����о�[J]. ��������, 2009, 31(1): 38-44.
XU Yi, LAO Da-zhong, LI Dong-hai, et al. Simulation study on nonlinear control of ship course[J]. Ship Engineering, 2009, 31(1): 38-44.
[2] �����. �������������Ӧ��ģ������ϵͳ[J]. ��������, 2008, 30(6): 46-51.
HE Zu-jun. Ship��s course steering controller based on adaptive neural-fuzzy inference system[J]. Ship Engineering, 2008, 30(6): 46-51.
[3] ��ΰ��, ���罨, ����ɽ. �������������ϵͳ³�����ٿ���[J]. ����������Ӧ��, 2009, 26(8): 893-895.
LUO Wei-lin, ZOU Zao-jian, LI Tie-shan. Robust tracking control of nonlinear ship steering[J]. Control Theory & Applications, 2009, 26(8): 893-895.
[4] �⺺��, �ƿ�, ��Ϯ. �������ֵı�ṹ���Ƽ�����[J]. �������̴�ѧѧ��, 2004, 16(3): 27-33.
WU Han-song, HUANG Kai, XU Xi. Variable structure control and simulation for course-keeping of ships[J]. Journal of Naval University of Engineering, 2004, 16(3): 27-33.
[5] Gokhan A A, Cansever G. Three link robot control with fuzzy sliding mode controller based on RBF neural network[J]. IEEE Transactions on Intelligent Control, 2006, 1(1): 2719-2724.
[6] ������, ������. ��������ı�ṹ�����Զ������[J]. �������´�ѧѧ��, 1998, 24(1): 13-18.
YANG Yan-sheng, JIA Xin-le. Design for ship autopilot using variable structure control algorithm[J]. Journal of Dalian Maritime University, 1998, 24(1): 13-18.
[7] ������, ��ΰ��, ���ٲ�. ����Bech ģ�͵Ĵ���������ɢ��ṹ����[J]. �й��촬, 2003, 44(4): 68-72.
SONG Li-zhong, MA Wei-ming, CHEN Shao-chang. Discrete variable structure control of ship autopilots based on bech��s equation[J]. Shipbuilding of China, 2003, 44(4): 68-72.
[8] ���˳�, ������, �Ž�. �����Դ������������Backsetpping���[J]. ���ƹ���, 2002, 9(5): 63-68.
WANG Xing-cheng, JIANG Xiao-hong, ZHANG Jian. Nonlinear Backsetpping design of ship steering controller[J]. Control Engineering of China, 2002, 9(5): 63-68.
[9] �Ÿ�, ս��Ⱥ, ������, ��. ���ڸĽ��;������������Ĵ��������Ժ�������Ӧ�����[J]. �Ϻ���ͨ��ѧѧ��, 2006, 40(6): 988-994.
DU Gang, ZHAN Xing-qun, ZHANG Wei-ming, et al. The Adaptive inverse control of nonlinear ship maneuvering based on improved radial basis function neural network[J]. Journal of Shanghai Jiaotong University, 2006, 40(6): 988-994.
[10] ����, �ž���. һ���µĻ���ģ�������ɵĻ�ģ���Ʒ���[J]. ϵͳ����ѧ��, 2002, 14(7): 964-967.
JIANG Kun, ZHANG Jing-gang. Design for ship autopilot using variable structure control algorithm[J]. Journal of System Simulation, 2002, 14(7): 964-967.
[11] ��ΰ, ��ǿ, �Զ���, ��. һ�����������绬ģ�����������[J]. ��������ѧ��, 2005, 9(6): 603-606.
WANG Wei, YI Jian-qiang, ZHAO Dong-bin, et al. Design of a new type of neural network sliding-mode controller[J]. Electric Machines and Control, 2005, 9(6): 603-606.
[12] ���Կ�, ������, ����. ��Ӧ�ʹ����˶���ѧģ�͵Ĺ���[J]. �������´�ѧѧ��, 2004, 30(1): 18-21.
ZHANG Xian-ku, JIA Xin-le, LIU Chuan. Research on responding ship motion mathematical model[J]. Journal of Dalian Maritime University, 2004, 30(1): 18-21.
(�༭ �²ӻ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��ɽ��ʡ��Ȼ��ѧ����������Ŀ(ZR2009FL013)��ɽ����ͨѧԺ���л���������Ŀ(Z201125)
ͨ�����ߣ���ҫ��(1984-)���У�ɽ����ɽ�ˣ�˶ʿ����ʦ�������Ƚ���������ơ������˶����Ƶȷ�����о����绰��0531-88392115��E-mail: hanyaozhen@yahoo.cn
ժҪ����Խ������������ϵͳ�����һ�ֻ��ڷ��������绬ģ��ṹ���Ʒ������÷���ͨ��������ƽ�ϵͳ������ƽ����ָ��������֮��ĺ�����ϵ��ͬʱ����˫�����м���������ṹ�����еı��ͺ�����ʵ�ֱ�ṹ���Ƶı߽�㷨��ƣ�����˽��������ṹ�����еĶ��������������ÿ��Ʒ����������õ���Ӧ�Ժ�³���ԡ�
[1] ����, �ϴ���, ���, ��. ������������Կ���ϵͳ�����о�[J]. ��������, 2009, 31(1): 38-44.
[4] �⺺��, �ƿ�, ��Ϯ. �������ֵı�ṹ���Ƽ�����[J]. �������̴�ѧѧ��, 2004, 16(3): 27-33.
[8] ���˳�, ������, �Ž�. �����Դ������������Backsetpping���[J]. ���ƹ���, 2002, 9(5): 63-68.
[10] ����, �ž���. һ���µĻ���ģ�������ɵĻ�ģ���Ʒ���[J]. ϵͳ����ѧ��, 2002, 14(7): 964-967.
[12] ���Կ�, ������, ����. ��Ӧ�ʹ����˶���ѧģ�͵Ĺ���[J]. �������´�ѧѧ��, 2004, 30(1): 18-21.
