
���ڽ�ͨ��Ƶ���еĶ��˶�Ŀ������㷨
��躣������⣬�ž�
(����ѧ �������Զ�������ѧԺ�����300072)
ժ Ҫ��
ժ Ҫ��������ܽ�ͨ���������Ӧ���˶�Ŀ����ٵĹ㷺�������һ�����͵Ļ��ڽ�ͨ��Ƶ���еĶ�Ŀ������㷨��ͨ��MarrС�����ʺ˺������ɾ�̬����������ϵ�ǰ֡��B/RDWT(Binary/redundant discrete wavelet transforms)����ж��˶�Ŀ��ʶ��ͬʱ���ñ�Ե��Ӱ���㷨ȥ����Ӱ�ĸ��š��˶����ٲ���SI_P(SIFT-particle)�����˲��㷨������ϸĽ��ľ�ֵƯ��(mean-shift)������˶�Ŀ���ȷ���ٴ��ڡ����ö�����������¼���˶�Ŀ��֮������ݹ����������ʶ��ȷ�ʵ�ͬʱ��������ĸ��Ӷȡ��㷨����VC++6.0ʵ�֣�ͨ��ʵ�ʵ�·���ԣ��о����������SI_P�����˲��㷨�봫ͳ�㷨��ȣ�ƽ��ʱ��ֻ��0.15 s�����ٴ��ڳ߶ȿ�����Ӧ�仯�����Ҹ��㷨���ڶ��˶�Ŀ��ʶ����پ��и���Խ��ʵʱ�ԺͿ��ڵ��ԡ�
�ؼ��ʣ�
���˶�Ŀ��������˶�ʶ�������ܽ�ͨϵͳ������������
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2010)03-1028-09
Traffic video based multiple moving targets tracking
GAO Tao, LIU Zheng-guang, ZHANG Jun
(School of Electrical Engineering and Automation, Tianjin University, Tianjin 300072, China)
Abstract: For the demanding of adaptive multiple moving targets tracking in intelligent transportation field, a new type of traffic video widely based multi-target tracking algorithm was presented. Background was modeled by Marr wavelet probability kernel function and a background subtraction technique based on binary/redundant discrete wavelet transforms was introduced to detect multiple moving targets. After obtaining the foreground, shadow was eliminated by an edge detection method. A type of SI_P (SIFT-particle) filter combined with improved mean-shift method was used for video tracking, and tracking window adaptively changed its scale according to the size of target. A Queue chain method was used to record data association among different targets, which could improve the detection accuracy and reduce the complexity. The software is VC++6.0, and by actual road tests, the average runtime of SI_P algorithm is only 0.15 s more than that of traditional algorithm; the scale of tracking window can adaptively changes. The algorithm tracks multi-target with a better performance of real time and mutual occlusion robustness; it can be used in intelligent traffic monitoring with extensive application prospect.
Key words: multiple moving targets tracking; motion detection; intelligent transportation system; vehicle tracking
���˶�Ŀ�����Ӧ�ù㷺���ر����ڽ�ͨ��Ƶ��ط��棬��������˹㷺���о������������ʶ������㷨��Ȼ������Щ�㷨��ֻ���ijһ�ض���������������Ӳ�������ƣ���һ����ķ�չ��ʷ�϶̣������������漰��ͼ������ģʽʶ����˹����ܵȶ��ѧ�ƣ������ۻ��������ƣ�һЩ��Ҫ��������δ�������֮��Ч�ķ����ͼ������д�������Ф������[1]�����չ�������˲������ֵƯ�Ʒ����˶�Ŀ����и��٣��÷��������ڱ����ϸ��ӵ���������ǣ���Ŀ���α�ϴ����˶�����ı�ʱ������������ʧЧ��Yao��[2]ͨ��������ʶ���˶�Ŀ������ÿ������˲��������˶�������ɫ����ƥ����ٷ������Զ��Ŀ����и��٣����÷���ֻ�����ڱ����ϼ�Ŀ������Ե����������������ڸ�����Ŀ�겻���ԣ��ᵼ�´����ٶȹ�����Ӱ�����Ч����Lei��[3-4]ʹ�û�ϸ�˹ģ�ͱ�����ģ������˶�Ŀ�꣬��ͨ���������˲�������Ŀ����ɫֱ��ͼ����״ģ�ͽ���ƥ��ʶ�𣬴Ӷ��Զ�Ŀ����и��١�������ƥ�����������Ӧ��ã����ᵼ���ۻ�������ȷ�Ƚϵ͡�Okuma��[5-6]���Boosted�����˲����ֵƯ�����ϵĶ�Ŀ������㷨������Ч�ظ�������ȷǸ���Ŀ�꣬���Ҿ��нϺõĿ��ڵ��ԡ������㷨������Ҫ����������ѵ�������㸴�Ӷȸߣ����Ҳ�������Ŀ���С�仯���ҵij���������������Ӧ�á�¬������[7]Ҳ���һ��Mean-shit�������˲���ϸ����㷨������Ӧ��Mean-shift �㷨���и��٣��ɵõ���Ŀ��λ�ü�������ϵ������Ԥ���趨�õ�����ϵ���Ƚϲ����ò�ͬ���˲����ԣ�����һ���Ŀ��ڵ��ԡ������㷨ͬ��û�п���Ŀ���С�仯���Ե����������ѡ�����Ӳ�����������ֵ���˹�Ԥ���趨��������ʵ��Ӧ�á��ڶ�Ŀ�����ݹ������棬��ֱ�ӵķ������������(NN)���������1��������1��Ŀ��켣�Ŀռ����������������Ϊ��Ŀ��ĵ�ǰ���⣬����ʵ��Ӧ���в���ŷʽ����IJ�ȳ����ڸ���ȱ�ݣ����ϸ������ݹ����˲�(JPDA)�㷨[8-9]�ۺϿ������ཻ�IJ����ڵ����лز��ͺ��������ܼ��ز������£����ٶ�����������Ŀ��ʱ��Ȼ�кܺõĸ������ܣ�������������Ÿ������ڻز���Ŀ����������ָ�����������ܼ��ز������£�������������ʹ洢�����������ʵ����Ӧ�á���������ݹ��������㷨(MHT)[10]�Ѷ������������ݣ��ú����Ĺ۲����ݽ�����ֲ�ȷ���ԣ�������ҪӦ�����״�����ĺ������١�Ŀǰ�����ݹ�����������֪ʶ����Ŀ��Ķ���ѧ���������������Ŀ��״̬�������������Ը��ٹ켣�����˲����������Ƶ�����������ͷ��ͼ��֮������Խϵͣ����ԣ�Ӧ�Ա�����Ŀ�꽨ģ���ݴ���ͼ�����и�֡�ж�λĿ�ꡣ������и����㷨�IJ��㣬�����������һ�ֽ��SIFT���������˲���Mean-shift�㷨�����ö��������ṹ���ݹ����Ķ�Ŀ������㷨������˸��ٵ�ȷ����Ч�ʣ����нϸߵ�Ӧ�ü�ֵ��
1 �˶�Ŀ��ʶ��
����������Ŀǰ��õ�һ��ʶ���㷨������������㷨���ܹ��ṩ���������˶���Ϣ����������������λ��ȷ���ٶȿ졣�����㷨��������ȫȡ���ڱ������ɵ��������������߶��˶�Ŀ��ʶ�����һ�ֻ���MarrС�����ʺ˺����ı����㷨(MarrB)������B/RDWT(Binary/redundant discrete wavelet transforms)��[11]��ȡ�˶���Ϣ�Ӷ�����˶�Ŀ�ꡣ
1.1 ��̬��������
����ʼ֡��Ϊ����B���赱ǰ����֡Ϊf���ֱ������н�����1/2�ֽ⣬����2���ֽ�Ĺ�ʽΪ��
��ͨ�������ͷһ��̶��ڵ�·����ϣ����ǵ��������Ŷ��������������ƫ�ƾ���Ϊ [v, h]��v��h�ֱ������ֱ��ˮƽ�������������n-1���ij�ʼƫ�ƾ���Ϊ[vn-1, hn-1]��ƫ�ƺ���Ϊ��
Ϊ�˱���ʵ�����㣬����Gauss�����IJ�![]()
![]() �γɵ�DOG(Difference of Gaussian)������MarrС�������ϵ���
�γɵ�DOG(Difference of Gaussian)������MarrС�������ϵ���![]() ��������ѽ��ƶ�
��������ѽ��ƶ� ���õ����ƫ�ƾ���
���õ����ƫ�ƾ���
![]() ��ͬʱ����
��ͬʱ����![]() ��Ϊ��һ��fn�ij�ʼƫ�ƾ���ͨ������������ȷ������ͼ�����չ��Χ����ƫ�����������ʼ��������ΪB(i, j)����ǰ֡����Ϊf(i, j)�����嵱ǰ֡�뱳��ƫ���Marr�˸��ʷֲ�Ϊ��
��Ϊ��һ��fn�ij�ʼƫ�ƾ���ͨ������������ȷ������ͼ�����չ��Χ����ƫ�����������ʼ��������ΪB(i, j)����ǰ֡����Ϊf(i, j)�����嵱ǰ֡�뱳��ƫ���Marr�˸��ʷֲ�Ϊ��
![]()
![]()
���У����Ʋ���![]() =0.3������
=0.3������![]() ��ֵȡ
��ֵȡ![]() ��
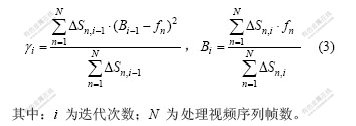
��![]() =0.01��ͬʱ���豳�����ظ���Ȩ��Ϊ��
=0.01��ͬʱ���豳�����ظ���Ȩ��Ϊ��
��������±���Ϊ��
ͼ1��ʾΪ����֡�����ϸ�˹���ͱ��о���ʹ�õ�MarrB�㷨�Խ�ͨ��Ƶ���б�����ģ�Ľ������ͼ1��֪��MarrB�㷨��ȥ�����������Լ���̬�������ɷ�����и��ѵĿ�����³���ԡ�

(a) ֡1��(b) ֡2��(c) ֡3��(d) ֡4��(e) ����֡���(f) ��ϸ�˹ģ�ͣ�(g) MarrB�㷨
ͼ1 ������ģ�Ƚ�
Fig.1 Background modeling comparison
1.2 B/RDWT���˶�Ŀ��ʶ��
�ֱ�Ա����͵�ǰ֡����B/RDWT������ɢС����ֱ����ȡ�˶���Ϣ�����ڶ�ά����ͼ�ɲ��ö���С���任��������������ɢС���任(RDWT)��ʵ�֡�������ɢС���任�dz�ȥ���²�������ɢС���任������û���²�������ͬ�߶ȵ�ʱ������ʹ̶�����ɢС���任���е�ƽ�Ʊ仯�����ﱻ����������������ɢС���任����Ӵ��Ĵ�С�������źŵĴ�С��ͬ���Ӷ��˶���ϢM(x, y)�ɸ��ݸ��Ӵ������ã�������̿ɲο�����[11-12]��ͼ2��ʾΪ��ǰ֡�Լ������˶�������˶�����Ŀ��ʶ��������

(a) ��ǰ֡��(b) Ŀ����
ͼ2 �˶��������
Fig.2 Motion vehicles detection
1.3 ��Ե��Ӱ��
Ҫ����Ӱ������Ҫ�ж�ͼ�����Ƿ�����Ӱ���ڣ�Ŀǰ���жϳ������Ƿ�����Ӱ���ڵ��о����١�ë��ҵ�[13-14]��ǰ�����ط�Ϊ����ɫ���͡���ɫ�������塰��ɫ�����ص��ƽ������ΪEb����Ӱ�̶�ΪPd����ǰ�������Eb��Pd��������Ӧ��ֵʱ���жϴ�����Ӱ������ֵ���ɾ����ж������ҵ����������ϸ���ʱ���������С�һ��أ��������й��ս�ǿʱ����Ӱ�ܿ��ܴ��ڣ���ˣ��������߲���ֱ���жϱ����������ж��Ƿ�����Ӱ�������ȳ�����䷽����ֵT��������Ŀʱ���ж�Ϊ������Ӱ��һ��Tȡȫ��������Ŀ��1/4���÷��������ٶȿ졢Ч���ã���ʹż�����У����ڲ��ñ�Ե��Ӱ���㷨��Ҳ���ᵼ��Ŀ�궪ʧ��Ŀ ǰ���˶�Ŀ����Ӱ���һ����û��ڲ�ɫ�ռ�ķ� ��[15-16]���÷�����Ϊ��Ӱ����ɫ�ʱ仯��С��ֻ�DZ�����ɫ��������ij��ϵ��K(��Ĥ)���Դ˽�����Ӱ�ָ���ǣ���ijЩ����£�Ŀ�����Ӱ����ɫ��Ϣ��û�����ԵIJ�����磬����ͨ��·������ͬʱ���ںڳ�����Ӱʱ���������ֺڳ����ɫ��Ӱ��һ����Ϊ����Ӱ������ϡ�ٵı�Եϸ�ڣ���Ŀ���ڲ���Եϸ�ڷḻ�����о��У�����������ȡ��ǰ����Ϣ�����ȣ���ǰ��ģ����С�Canny�����ӱ�Ե��ȡ��Ȼ��ǰ��������С�Sobel����Ե��ȡ����ȥ�������������Ϣ�IJ�ֵ���ɵõ��˶�Ŀ�ꡣͼ3��ʾΪ���㷨�����账�������
2 ���SI_P��Mean-shift�ĸ����㷨
�Լ��������˶�Ŀ����Ϣ��Ϊ����֡���ٵij�ʼ����������һ�ֽ��SIFT���������˲���Mean- shift�ĸ����㷨����߸��ٵ�ȷ�ȡ�
2.1 SI_P�㷨
SIFT������[17]�������˶�Ŀ��³���������������������˲��㷨[18-19]���ϣ��γ�SI_P�˲��㷨����ʼ���ӵ�ѡȡ�Լ�״̬ת�ƶ���SIFT������Ϊ���ݡ��㷨����������¡�
(1) ������ʼ�����ڳ�ʼ֡��ͨ���˶�Ŀ��ʶ���㷨ȷ��Ŀ����������Ŀ��ģ�����ɫ���ʷֲ���
![]() ��
��![]()
���У�IΪ������������صĸ�������ΪKronecker���Ӻ���������aΪ��������Ĺ�ģ��С��h������ɫֱ��ͼ��xiΪ��i�����ص��λ�ã�����fΪ��һ�����ӣ�kΪEpanechnikov�˺������������������Ŀ������͵�ǰ֡SIFT�����㽨����ʼ״̬��������![]() ��
��
(2) �����ѡ��[20]��������Ȩֵ![]() ��������St-1�г�ȡN�������������������Ϲ�һ���ۻ�Ȩֵ��
��������St-1�г�ȡN�������������������Ϲ�һ���ۻ�Ȩֵ��![]() ��
��![]() ��
��![]() ������[0, 1]�����ϵľ��ȷֲ��������r��������������ʹ��Ȩֵ
������[0, 1]�����ϵľ��ȷֲ��������r��������������ʹ��Ȩֵ![]() ��r����Сk����ʹ
��r����Сk����ʹ![]() ��
��
(3) �������ռ�ͨ���˶�ģ��
![]()
![]()
���У�AΪ״̬ת�ƾ���RΪ�Ŷ�����rΪ�����˹����A��R�ֱ�Ϊ��
![]() ��
��![]()
����![]() ,
, ![]() ��ͬʱ����tʱ����SIFTƥ��������㸳��St���õ�Ssift, t��
��ͬʱ����tʱ����SIFTƥ��������㸳��St���õ�Ssift, t��
(4)�����ѡ�����ֲ���Ŀ��ģ���Bhattacharyyaϵ��![]() ��
��
���¼���Ssift, t��ÿ��������Ȩֵ��
![]()
![]()
(5) �������ļ�Ȩƽ������tʱ���˶�Ŀ�������λ�ã�![]() ��
��
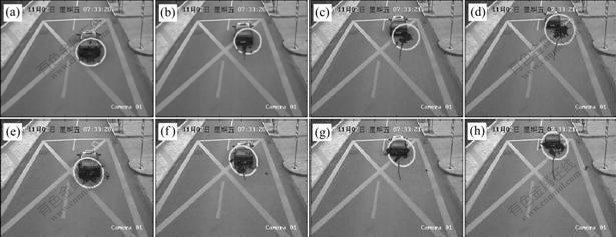
ͼ4��ʾΪ���SIFT������������˲����� �����
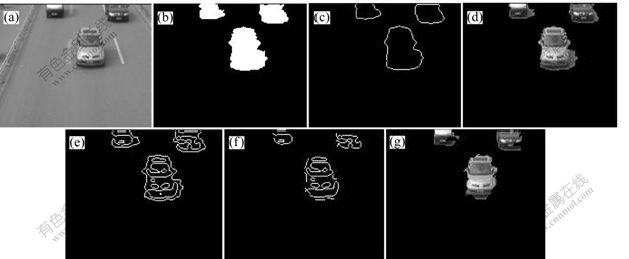
(a) ԭͼ��(b) �˶�Ŀ������(c) �˶�Ŀ�������Ե��(d) ǰ����(e) ǰ����Ե��(f) ��Ե��ֵ��(g) Ŀ����ȡ
ͼ3 ��Ӱ�����Ŀ����ȡ
Fig.3 Targets segmentation after removing shadow
2.2 Mean-shift�˶�Ŀ��߽���ȡ
Mean-shift[21]��һ�ֻ����ⲿ�����ĸ����㷨���ܹ��Ի���Ŀ�����ʵʱ���١�����Ŀ��ʵʱ���٣�����SI_P�˲��õ���Ŀ�����ij�ʼλ��Ϊ![]() �������
�������
������![]() ���õ�
���õ�![]() ��Ȼ�����Ȩֵ{wi}�����У�
��Ȼ�����Ȩֵ{wi}�����У�![]() ��bΪ��ɫ���ʷֲ�������i=1, ��, nh����gΪ��Ȩ�˺����� ��Ŀ��������λ��Ϊ��
��bΪ��ɫ���ʷֲ�������i=1, ��, nh����gΪ��Ȩ�˺����� ��Ŀ��������λ��Ϊ��
![]()
![]()
ͬʱ������![]()
![]() ����
����![]() ��
��![]() ʱ����
ʱ����![]() ����
����![]() ��
��![]() (
(![]() Ϊ1������ֵ)�����㷨����������
Ϊ1������ֵ)�����㷨����������
��![]() �����µ���������������Ϊ10��һ���ֵƯ�Ʒ��ĸ��ٴ������ֲ��䣬������ӦĿ�����ŵı仯���Դ˲��û���MarrС���˺�����߶ȸ����� ��[12]����
�����µ���������������Ϊ10��һ���ֵƯ�Ʒ��ĸ��ٴ������ֲ��䣬������ӦĿ�����ŵı仯���Դ˲��û���MarrС���˺�����߶ȸ����� ��[12]����
![]() ��
��
![]() ��
��
��
![]()
ͨ������Ӧ�ı�MarrС���˿��߶ȣ��Ϻõؽ�����������⡣
3 ��Ŀ�����ݹ���
���ڽ�ͨ��Ƶ������У���������ʻ��������ݽṹ�Ķ����������ƣ���ʻ��ijһ��·�����ij���һ��Ҳ���뿪��·(Υ�³���������٣����Ҳ�Ӱ�����ȷ��)����ˣ����ڶ��˶������ĸ������ݹ������ö�������������(��ͼ5��ʾ)��������ÿһ��Ԫ�ش����˶�������Ԫ��Ϊ�ṹ�壬��������������λ�á����ܱ߽��λ�á���ʻ�����ڲ���ɫ���ʷֲ��Լ����Bhattacharyyaƥ��ϵ������Ҫ��Ϣ��
(1) ��Ŀ��Ľ��롣�ڿռ��ϣ���Ŀ��ֻ��������Ƶͼ��֡�ı߽�������֡�����ͼ��ı߽������1���۲�ֵ������Ϊy, �������������ִ�Ŀ��ľ���D�����þ���Զ����Ŀ��������֡�п����˶��ľ��룬��˵���ù۲�Ϊ1����Ŀ�꣬�ڶ��������в�����Ӧ��Ԫ��ֵ������������ɫ���ʷֲ�pu(y)���ж������ִ��˶�Ŀ��{��1, ��2, ��, ��n}��Bhattacharyya���ϵ��![]() ����
����![]()
![]() ����
����![]() С���ִ�Ŀ���Bhattacharyyaϵ�������ж�Ϊ��Ŀ�ꣻ����ѡȡ��ֵ����Ϊ���ƥ��Ŀ���״̬�仯��������������ӦԪ���ڲ��ṹֵ��
С���ִ�Ŀ���Bhattacharyyaϵ�������ж�Ϊ��Ŀ�ꣻ����ѡȡ��ֵ����Ϊ���ƥ��Ŀ���״̬�仯��������������ӦԪ���ڲ��ṹֵ��

(a), (b)��(c)�ֱ�Ϊ1��5��8֡ʱ��ԭʼͼ��(d), (e)��(f)�ֱ�Ϊ(a), (b)��(c)��Ӧ�ĸ��ٽ��
ͼ4 SIFT�����������˲�����
Fig.4 Particle filtering tracking based on SIFT matching

ͼ5 �����������ݹ���
Fig.5 Data association of queue technique
(2) ��Ŀ�����ʧ����Ŀ�����ʧҲֻ���ܳ�����ͼ��ı߽���������һ֡ͼ���е�Ŀ���i�ӽ��߽磬��������һ֡ͼ����ʧ���������·�������ʧĿ������ж�����ȡ��һ֡ͼ����Ŀ���j����һ֡�и�Ŀ��{��1, ��2, ��, ��m}��Bhattacharyya��ضȣ������κ�Ŀ�궼����أ���Ŀ���j��ʧ��
�÷������ŵ��������㸴�Ӷȵͼ����ڽ�ͨ��ء���ʵ�ʼ���У������Ķ�Υ�³����ļ�أ�������ʻ�����кʹ���Ƶȳ���������Щ�����ɸ���Ŀ�������ֵ�Լ���ʻ��������жϡ�������Υ����Ϊ��Ŀ�������ǰ�Ӷ���������ɾ���������д������Ӷ���߸���ϵͳ�����ܲ����Ͷ�Ӳ�������������ֳ�Ӧ�á�
4 ʵ����
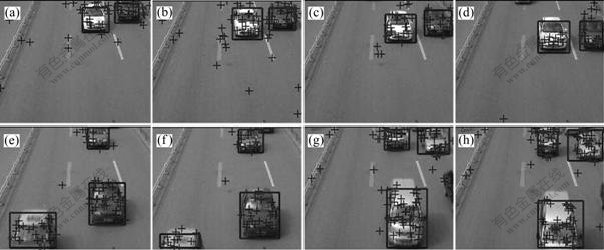
ͼ6��ʾΪ��ͳ�����˲�������SI_P(SIFT- particle)�˲��������ܣ�ʮ�ִ�������״̬������Ϊ�˲��õ����˶��켣����ͼ6���Կ�������SI_P�㷨�У�ÿ֡�е�����һֱ������Ŀ�������ڣ����ڴ�ͳ�����˲��㷨�У�����Ŀ������ı䣬�켣���ϴӶ�ƫ���˶����嵼�¸���ʧЧ��
ͬʱ����CPUΪ1.4 GHz���ڴ�Ϊ512 M������ΪVC++6.0�Ļ����£�ѡȡ15֡ͼ��(�ֱ���Ϊ768��576)�������ߵ�����ʱ����жԱȣ������ͼ7��ʾ������SIFT��������ȡ���̺�SI_Pƽ������ʱ��ֻ�������˲��㷨��ƽ������ʱ���0.15 s����ȫ�ڼ��ϵͳʱ��������Χ�ڡ�
���ڽ�ͨ��Ƶ���еĶ�Ŀ����٣���Ȼ�ڵ�����Ŀ��ķ�����һ�����ѵ����⣬�����ڽ�ͨ��ص�ʵ��Ӧ���У��������ڵ�����Ƚ�����ʱ(���罻ͨ·�ڵĶ³�)�����������ĵ��Ƕ³����еij��ȣ����ڵ��������ķָ�û�кܸߵ�Ҫ��ֻ���ڳ����Ƚ�˳��ʱ�Ÿ����ĵ��������ļ������٣������������ �£�����֮����������һ���ļ�࣬�ڵ�������Ƚ��٣���ʹ��Ҳ�Ƚϼ�ͼ8��ʾΪ�����ϳ���·��ؽ������ʵ�ʼ��Ӧ���У�������Ŀ�����ϸСʱ���Ҳ�����壬���˺�Զ����������Ϊ����ȥ��������Ҫ��ע������������Ϊ�Ƚϣ������ĸ���ϵͳ��Ŀǰʹ�ýϹ㷺��MoG-Kalman��Ŀ�����ϵͳ[3-4]���жԱȣ���������ѡΪ�����������ϴ�ʱ�ļ��¼��Ƭ�ϡ�ͼ9��ͼ10��ʾΪ2�ָ���ϵͳ�IJ��Խ������ͼ9��ͼ10���Կ��������ڱ�����ģ�Լ��˶�ʶ���ȷ�ԣ�������������ĸ���ϵͳ����Ч�س�ȥ���ˡ��ζ�����Ҷ�����յı仯�ȱ���������Ӱ��(Ϊ���������ȥ����������ʾ)��ͬʱ���ٴ��ڳ߶���Ŀ���С����Ӧ�ı䣬���ҶԳ�������ڵ�Ҳ����һ����³���ԣ���MoG-Kalman��Ŀ�����ϵͳ���ڱ������ȱ�ݣ�ʶ�������нϴ�������ֻ����������Ϣ�����ٴ���Ҳ������Ӧ�ı�߶ȡ����ڸ����У���ʶ�������eΪ��
![]()
��ͳ�����˲���(a) 24֡; (b) 39֡; (c) 56֡; (d) 60֡
SI_P�˲���(e) 24֡; (f) 39֡; (g) 56֡; (h) 60֡
ͼ6 ��ͳ�����˲���SI_P�˲�����
Fig.6 Traditional particle filtering and SI_P filtering tracking
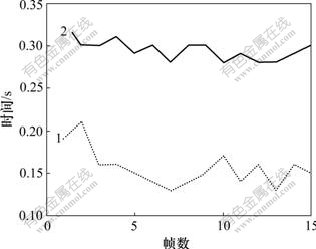
1����ͳ�����˲�����; 2��SIFT_P�˲�����
ͼ7 ����ʱ��Ա�
Fig.7 Runtime comparison
(a) 4281֡; (b) 4286֡; (c) 4294֡; (d) 4300֡; (e) 4312֡; (f) 4318֡; (g) 4326֡; (h) 4339֡
ͼ8 ����·���ٽ��
Fig.8 Multiple targets tracking on freeway
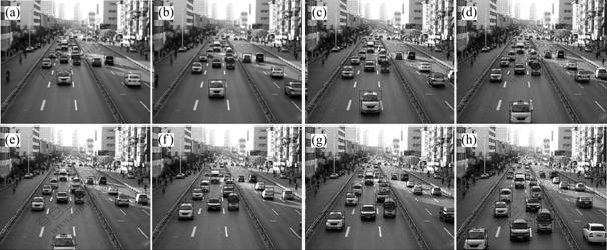
(a) 318֡; (b) 329֡; (c) 337֡; (d) 342֡; (e) 346֡; (f) 356֡; (g) 365֡; (h) 377֡
ͼ9 ���ĸ���ϵͳ��������·�ϵĶ�Ŀ����ٽ��
Fig.9 Multiple targets tracking on urban road by system provides by authors

(a) 318֡; (b) 329֡; (c) 337֡; (d) 342֡; (e) 346֡; (f) 356֡; (g) 365֡; (h) 377֡
ͼ10 MoG-Kalman����ϵͳ��������·�ϵĶ�Ŀ����ٽ��
Fig.10 Multiple targets tracking on urban road by system of MoG-Kalman
���У�rΪ�㷨ʶ����ٵ�ȫ��������Ŀ��fΪǰ��������Ŀ��ѡȡ0~230֡��Ϊ�Աȶ���ʶ���������ͼ11��ʾ��
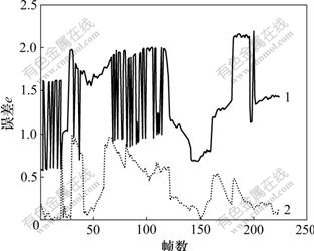
1��MoG-Kalman; 2�����ĸ���ϵͳ
ͼ11 ����ȱȽ�
Fig.11 Error comparison
5 ����
(1) �����һ�ֻ��ڽ�ͨ��Ƶ���еĶ�Ŀ������㷨�����㷨ͨ��MarrС�����ʺ˺������ɾ�̬����������˱������ɵ���Ч�ԣ�����ϵ�ǰ֡��B/RDWT����ж��˶�Ŀ��ʶ��ͬʱ���ñ�Ե��Ӱ���㷨ȥ����Ӱ�ĸ��š�
(2) �˶����ٲ������͵�SI_P�����˲��㷨������Ͼ�ֵƯ�Ʒ�����˶�Ŀ���ȷ���ٴ��ڣ�������Ӧ�ı�߶ȡ����ö�����������¼���˶�Ŀ��֮������ݹ����������ʶ��ȷ�ʵ�ͬʱ����������ĸ��Ӷȡ�ʵ�ʵ�·���Խ�����������㷨���ڶ��˶�Ŀ��ʶ����پ�����Խ�����ܣ���Ӧ�������ܽ�ͨ��ء����ٵȡ�
�ο����ף�
[1] Ф����, ������, ����ԭ, ��. һ��³���Ķ�Ŀ���Զ������㷨[J]. �źŴ���, 2007, 23(3): 437-440.
XIAO Jing-ruo, ZHANG Yan-ning, HU Fu-yuan, et al. A robust automatic multi-target tracking algorithm in complex environments[J]. Signal Processing, 2007, 23(3): 437-440.
[2] Yao F H, Sekmen A, Malkani M J. Multiple moving target detection, tracking, and recognition from a moving observer[C]//Proceedings of the IEEE International Conference on Information and Automation. New York: IEEE, 2008: 978-983.
[3] LEI Bang-jun, XU Li-qun. Real-time out-door video surveillance with robust foreground extraction and object tracking via multi-state transition management[J]. Pattern Recognition Letters, 2006, 27(15): 1816-1825.
[4] Rowe D, Reid I, Gonz��lez J, et al. Unconstrained multiple-people tracking[C]//Proceedings of the 28th DAGM Symposium. Berlin: Springer, 2006: 505-514.
[5] Okuma K, Taleghani A, Freitas N, Little J, Lowe D. A boosted particle filter: multitarget detection and tracking[C]//Proceedings of the 8th European Conference on Computer Vision. Berlin: Springer, 2004, 1: 28-39.
[6] CAI Yi-zheng, Freitas N, Little J. Robust visual tracking for multiple targets[C]//Proceedings of the 9th European Conference on Computer Vision. Berlin: Springer, 2006, 4: 107-118.
[7] ¬����, ��ѧ��, ��ı��. һ�ֻ�����ɫ�ֲ��Ļ����Ƶ���ٷ���[J]. ��������Ϣѧ��, 2008, 30(2): 259-262.
LU Xiao-peng, YIN Xue-min, ZOU Mou-yan. A hybrid algorithm of object tracking based on color distribution[J]. Journal of Electronics & Information Technology, 2008, 30(2): 259-262.
[8] �ͺ���, ���ڹ�, ���, ��. �ഫ������Ŀ����ٵ�JPDA�㷨[J]. ϵͳ����ѧ��, 2004,16(7): 1563-1566.
BA Hong-xin, ZHAO Zong-gui, YANG fei, et al. JPDA in multisensor multitarget tracking[J]. Journal of System Simulation, 2004, 16(7): 1563-1566.
[9] ���, ��Ӣ��, ������. ��Ŀ������е����ݹ����㷨[J]. ϵͳ��������Ӽ���, 2000, 22(3): 11-15.
YANG Chun-ling, YU Ying-lin, LIU Guo-sui. Data association algorithm in multi-target tracking[J]. Systems Engineering and Electronics, 2000, 22(3): 11-15.
[10] Cox I J, Hingorani S L. An efficient implementation of reid's multiple hypothesis tracking algorithm and its evaluation for the purpose of visual tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18(2): 138-150.
[11] GAO Tao, LIU Zheng-guang, ZHANG Jun. Redundant discrete wavelet transforms based moving object recognition and tracking[J]. Journal of Systems Engineering and Electronics, 2009, 20(5): 1115-1123.
[12] GAO Tao, LIU Zheng-guang, ZHANG Jun. BDWT based moving object recognition and mexico wavelet kernel mean shift tracking[J]. Journal of System Simulation, 2008, 20(19): 5236-5239.
[13] ë���. ��ͨ��Ƶ����е�Ŀ���������[D]. �Ϻ�: �Ϻ���ͨ��ѧͼ���, 2005.
MAO Yan-fen. Object detection and tracking in traffic video surveillance[D]. Shanghai: Library, Shanghai Jiao Tong University, 2005.
[14] XIAO Mei, HAN Chong-zhao, ZHANG Lei. Moving shadow detection and removal for traffic sequences[J]. International Journal of Automation and Computing, 2007, 4(1): 38-46.
[15] ����. ���ڲ�ɫ��Ϣ�ͱ�Ե�������˶���Ӱ���[J]. �㽭��ѧѧ��: ��ѧ��, 2004, 38(4): 389-391.
PAN Xiang. Moving shadow detection based on color information and edge features[J]. Journal of Zhejiang University: Engineering Science, 2004, 38(4): 389-391.
[16] ��Ƽ, ����. ����С��ϵ������ѧ�����ij�����Ӱ���[J]. ����ѧѧ��, 2008, 41(2): 199-203.
WANG Ping, WANG Bo. Vehicle shadow detection based on wavelet coefficients and photometric features[J]. Journal of Tianjin University, 2008, 41(2): 199-203.
[17] Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[18] Nummiaro K. An adaptive color-based particle filter[J]. Image and Vision Computing, 2003, 21(1): 99-110.
[19] Arulampalam M S, Maskell S, Gordon N, Clapp T. A tutorial on particle filters for on-line nonlinear/non-gaussian bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188.
[20] Reckleitis I. A particle filter tutorial for mobile robot localization[C]//Proceedings of the IEEE International Conference on Robotics and Automation. New York: IEEE, 2003, 42: 1-36.
[21] ����, ����, ��ƽ, ��. Mean shift��Ŀ������е�Ӧ��[J]. ϵͳ��������Ӽ���, 2007, 29(9): 1405-1409.
SONG Xin, SHEN Zhen-kang, WANG Ping, et al. Application of mean shift method in target tracking[J]. Systems Engineering and Electronics, 2007, 29(9): 1405-1409.
�ո����ڣ�2009-06-25�������ڣ�2009-08-25
������Ŀ��������Ȼ��ѧ����������Ŀ(60772080)���������Ȼ��ѧ����������Ŀ(08JCYBJC13800)������пƼ�֧�żƻ��ص���Ŀ����������Ŀ(10ZCKFSF01100)������й�����ͨ�ֿ��л���������Ŀ(2005 [16])
ͨ�����ߣ����(1981-)���У��ӱ�ʯ��ׯ�ˣ���ʿ���������ܽ�ͨ�pģʽʶ����о����绰��13702013536��E-mail: gaotao231@yahoo.cn
(�༭ ����ɭ)
