履带自张紧式主臂可变构型机器人机构原理与越障分析
刘少刚1,郭云龙1,贾鹤鸣2,林珊颖3,赵丹1
(1. 哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨,150001;
2. 东北林业大学 机电工程学院,黑龙江 哈尔滨,150040;
3. 哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨,150001)
摘要:研究一种主臂可变构型履带自张紧式救援机器人,针对履带张紧问题,应用椭圆形成原理,能够从理论上保证机器人构型变化时履带的形变量为0 mm,从而可以获得更好的履带张紧效果;通过引入摆臂三角轮机构丰富了构型变化,提高机器人的越障性能。对机器人攀爬台阶、斜坡及爬越沟道的运动机理进行分析,建立运动学模型。研究结果表明:机器人的实际越障性能与理论计算结果相符,具备良好的越障能力。
关键词:救援机器人;主臂可变构型;履带自张紧;越障;椭圆形成原理
中图分类号:TP24 文献标志码:A 文章编号:1672-7207(2013)06-2289-09
Mechanism principle and obstacle-crossing analysis of robot with automatic-strained track and variable main arm configuration
LIU Shaogang1, GUO Yunlong1, JIA Heming2, LIN Shanying3, ZHAO Dan1
(1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China;
2. College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China;
3. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract: A robot with variable main arm configuration and automatic-strained track was studied. Aiming at the problem of track straining, a better effect of track straining was obtained using the ellipse forming principle and ensuring the shape variable of track was 0 mm. Through introducing the swinging-wheel, the variation of configuration was enriched and the obstacle-crossing capability of robot was improved. The movement mechanism of robot platform carrying out tasks of navigating stairs, climbing slopes and crossing trenches was analyzed. A kinematic model was built, and the maximum obstacle-crossing capability in corresponding environment was generated. The results show that the experimental result of robot obstacle-crossing capability is consistent with that of theoretical calculation, and the robot has good obstacle-crossing capability.
Key words: rescue robot; variable main arm configuration; automatic-strained track; obstacle-crossing; ellipse forming principle
救援机器人技术最初起源于军事领域的战场侦察、战场清扫等[1-5]。20世纪80年代,有人开始从理论上对机器人应用于灾害搜救工作进行了探讨,而机构本体的构型设计是救援机器人一个重要组成部分。目前,救援机器人机构的种类主要有履带式[6-7]、轮式[8-10]、腿式(仿人形)[11-12]、多关节式[13]等。李允旺等[6]和Karkoub等[7]分别对四履带与六履带机器人的越障机理及越障能力进行了研究,此类平台越障平稳性高,接地比压小,通过性能好,但速度较慢,功耗大。李允旺等[8]还提出了一种摇杆式四轮机器人移动平台。此类平台自身质量小、机构简单、行走速度快,但地形适应力、通过性能都有一定的局限性。赵铁石等[13]研制了一种基于空间连杆机构的多关节蛇形机器人,此类机器人地形适应力强,但机构复杂,难于控制。近年来,复合式机构特别是轮履式机构在机器人的构型设计领域中受到越来越多学者的关注[14-18]。李允旺等[14]提出了一种采用对称的W形履带悬架的摇杆式履带机器人移动系统,赵海峰等[15]开发了一种具有自适应能力轮―履复合变形移动机器人。本文作者将椭圆形成原理引入机器人的构型设计中,以实现履带机器人的三角构型变化,同时,从理论上确保履带的形变量为0 mm,解决构型变化时的履带张紧问题。在此基础上,引入摆臂三角轮机构,使其构型变化更为灵活。从运动学的角度对机器人平台通过几种典型地形进行了机理及性能分析,推导出相关性能参数,为系统的控制器设计提供了模型依据。
1 主臂可变构型履带式机器人平台机构原理
1.1 主臂可变构型推衍
构型推衍如图1所示。从图1可见:固定履带式行走机构(构型a)增加摆臂后可形成四履带式机构(构型b)与六履带式机构(构型c);四履带与六履带机构的关节角固定时分别形成三角履带机构(构型d)与梯形履带式行走机构(构型e);在三角履带机构一侧增加摆臂履带,可形成复合履带机构(构型f);若用摆臂三角轮替换摆臂履带,可形成以履带机构为主的轮履复合机构(构型g);将轮履复合机构的三角履带部分的固定关节角移至车体中心并构成转动副可形成构型可变的轮履复合机构平台(构型h)。
图1中各构型特点对比见表1。
本文以图1中的构型h为可变构型机器人的设计基础。当其主臂旋转而发生构型变化时,需保证履带的三角构型周长为常数,从而保证履带的时刻张紧状态,以此使平台具备较好的通过性能。文献[17]对一类可变构型机器人履带支撑机构的参数进行了分析,履带的长度变化量为1/1 000。
表1 构型对比
Table 1 Configuration contrast
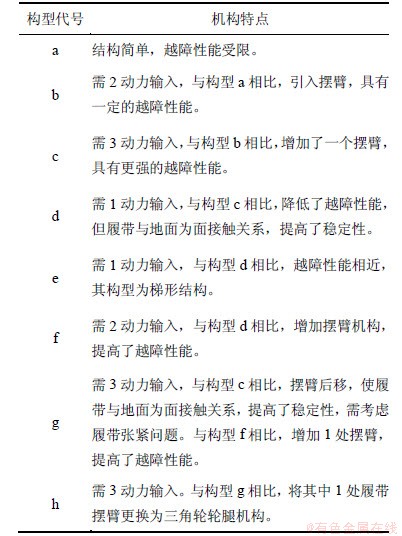
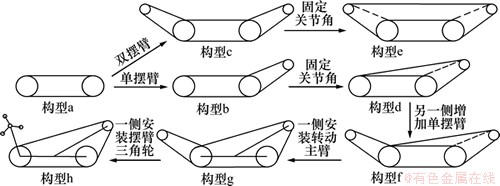
图1 构型推衍
Fig. 1 Derived of configurations
1.2 平台可变构型原理
根据可变构型履带机构的特点,将椭圆形成原理引入机器人的构型设计中,可推衍出主臂可变履带机器人的基本构型。文献[19]提出了一种利用链轮齿轮传动关系来实现椭圆形成轨迹的设计方案,但内部传动复杂,载荷较大。
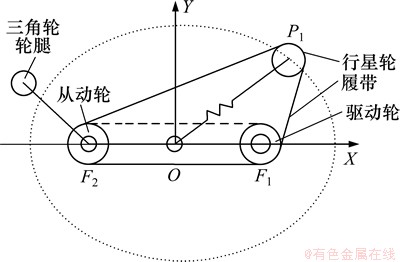
图2 机构原理
Fig. 2 Principle of configuration
机构原理如图2所示。图2中,P1是椭圆轨迹上的可移动点,P1F1+P1F2之和为常数2a。焦点F1,F2确定时,三角形P1F1F2的周长亦为常数。基于上文所提到的几何关系,可于焦点F1和F2处及可移动点P1处分别安装驱动轮和行星轮。履带的长度为所在椭圆轨迹内构成三角形P1F1F2的周长。在弹簧的拉伸补偿下,通过主臂的旋转可以令三角形P1F1F2构型发生变化,此变化是连续的。在车体一侧尾部安装摆臂三角轮机构可与平台主体的三角构型组合,从而实现如表2所示的主要几种构型状态。
1.3 样机组成与传动设计
图3所示为履带自张紧式主臂可变构型机器人样机[20],图4所示为机器人平台的内部传动图。机器人主要由车体、驱动电机、驱动轮、从动轮、行星轮、轮腿机构、履带以及可伸缩主臂构成。驱动轮,从动轮分布于车体前后端,主臂位于车体左右两侧,轮腿机构位于车体后方左右两侧。在弹簧的拉伸补偿下,履带可以在运动周期中保持连续张紧状态。为了避免车体的横向尺寸过大,机器人平台采取了涡轮蜗杆减速箱与减速电机组合的驱动方式。具体驱动关系为:主臂驱动电机转动驱动双输出轴涡轮蜗杆减速箱带动两侧的可伸缩主臂转动,主臂转动带动行星轮转动,行星轮轮心的轨迹即为椭圆。驱动轮与从动轮安装于椭圆轨迹焦点位置,行星轮轮心转动即可实现平台的构形变化。左右对称布置减速箱与平台驱动电机实现差速转向、前进和后退等基本动作。轮腿电机驱动减速箱带动三角轮轮腿机构转动,使其上下摆动从而实现辅助支撑越障功能。其中,可伸缩主臂部分如图5所示,主要包括:底板、上压板,侧压板、拉伸弹簧、上挂钩、下挂钩和滑板。滑板位于底板和上压板之间,两侧压板位于滑板左右两侧,两上挂钩分别位于底板和上压板上,两下挂钩位于滑板前后两侧。主臂摆动时,滑板受拉伸弹簧拉动向上或者向下移动,从而实现履带张紧动作。
表2 变形形态
Table 2 Shape-shifting
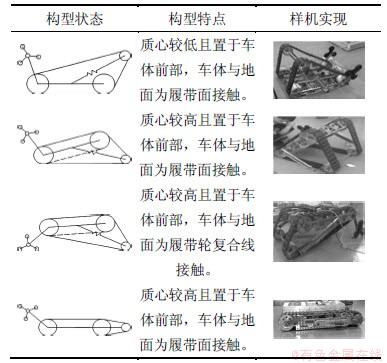
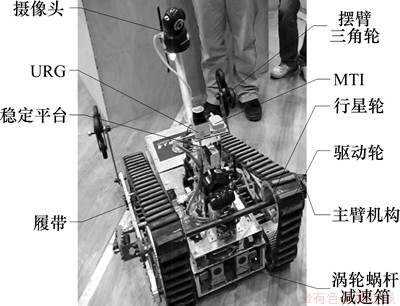
图3 主臂可变构型履带机器人
Fig. 3 Robot with track and variable main arm configuration
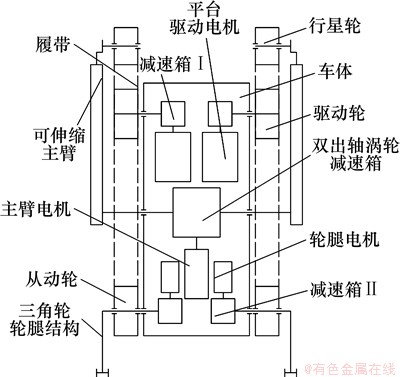
图4 内部传动图
Fig. 4 Internal transmission
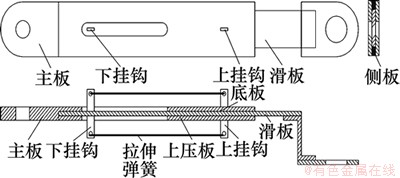
图5 可伸缩主臂
Fig. 5 Telescopic main arm
2 机器人平台越障分析
2.1 攀爬台阶
机器人攀爬台阶的动作过程如图6所示。当机器人平台的质心越过台阶的外角线时,平台此时具备了完成攀越台阶的充分条件,可以完成攀爬台阶的动作。建立如图7所示以O′为坐标原点,以平行于O′O2的直线为 轴的直角坐标系X′O′Y′。
轴的直角坐标系X′O′Y′。
为了计算方便,机器人的相关参数如表3所示。则整个机器人平台的质心G0为
 (1)
(1)
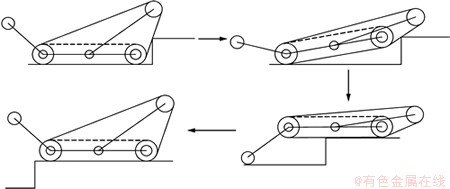
图6 攀爬台阶
Fig. 6 Climbing steps
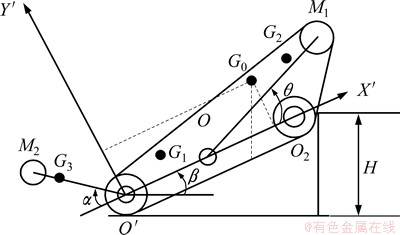
图7 质心越过台阶外角线
Fig. 7 Center of mass beyond outside line of step
表3 文中参数意义
Table 3 Meaning of parameters
根据式(1)中的参数关系可知:质心G0轨迹为随着θ角变化的以Gα( ,
, )为圆心,以
)为圆心,以 为半径的圆。圆心Gα的轨迹是随着α角变化的以
为半径的圆。圆心Gα的轨迹是随着α角变化的以 ,
, 为圆心,以
为圆心,以 为半径的圆。根据图7所示的几何关系可知:
为半径的圆。根据图7所示的几何关系可知:
 (2)
(2)
对式(2)求关于仰角β的二次偏导,可得:
 (3)
(3)
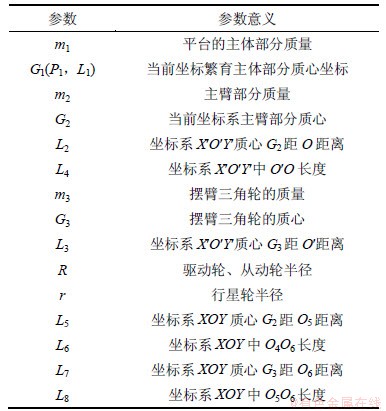
由图7所示 。此时,可知在所述β范围内,
。此时,可知在所述β范围内, ,根据函数的极值与最值关系可知:当
,根据函数的极值与最值关系可知:当 时,式(2)存在极大值Hmax。Hmax为机器人平台质心越过台阶外角线高度,即攀越台阶高度的最大值。此时,的解为βmax,即机器人不发生倾覆的最大仰角。
时,式(2)存在极大值Hmax。Hmax为机器人平台质心越过台阶外角线高度,即攀越台阶高度的最大值。此时,的解为βmax,即机器人不发生倾覆的最大仰角。
当机器人平台的质心未越过台阶的外角线时,如图8所示,若机器人继续前进,则图8中的仰角β会继续增大,会导致机器人平台质心逐渐上升,此时的情况分析比较复杂,一般可以分成以下2种情况:
(1) 机器人质心上升的同时,在驱动电机的驱动力下,机器人平台前进。当平台质心恰好越过台阶的外角线时,由于机器人自身重力作用,机器人平台以台阶上接触线为支撑线而旋转,最终落至台阶上部。
(2) 机器人的质心逐渐上升的同时,无法跨过台阶的外角线,机器人发生倾覆,攀爬失败。在攀爬不同高度、宽度的连续阶梯时,机器人的实际动作不会完全一样。
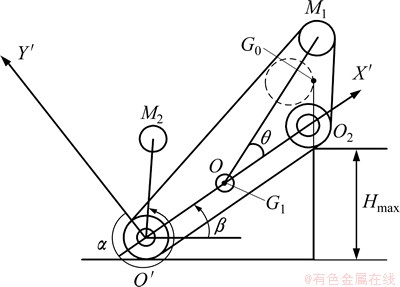
图8 质心未越过台阶外角线
Fig. 8 Center of mass without across outside line of step
2.2 正面斜坡仰角
建立如图9所示以为O″坐标原点,以平行于O″O2′的直线为Y轴的直角坐标系X″O″Y″。
整个机器人平台的质心为:
图9 正面斜坡仰角
Fig. 9 Elevation angle of front slope
 (4)
(4)
机器人不会发生倾覆现象的条件是车体仰角满足下式:
 (5)
(5)
将式(4)代入式(5)可得:
 (6)
(6)
2.3 侧面斜坡仰角
如图10所示,设履带宽度为 ,整个车体的宽度是b0。机器人不发生倾覆条件为α4>α3,当α3∈(0,π/2),α4∈(0,π/2)时,则tan α4≥tan α3,可得:
,整个车体的宽度是b0。机器人不发生倾覆条件为α4>α3,当α3∈(0,π/2),α4∈(0,π/2)时,则tan α4≥tan α3,可得:
 (7)
(7)
当履带轮的外侧与斜坡边缘重合时,亦可得出台阶高度的最大值为
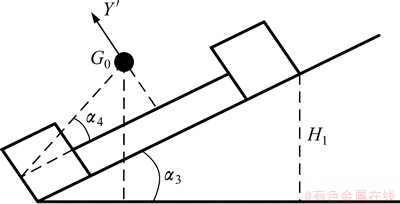
图10 侧面斜坡仰角
Fig. 10 Elevation angle of side slope
 (8)
(8)
2.4 爬越桥沟
机器人平台爬越桥沟的过程如图11(a)~(f)所示,此时可能会出现2种情况:
(1) 当机器人平台质心的位置如图11(e)所示时,其质心已经越过桥沟,从一端通过另一端,机器人平台平行地面越过桥沟。
此种方式的临界情况如图12所示。
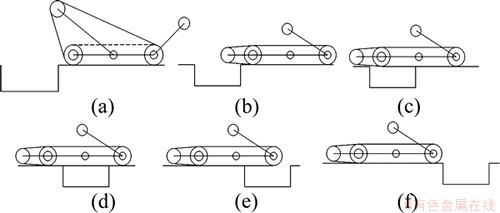
图11 爬越较短距离桥沟
Fig. 11 Crossing narrow trench
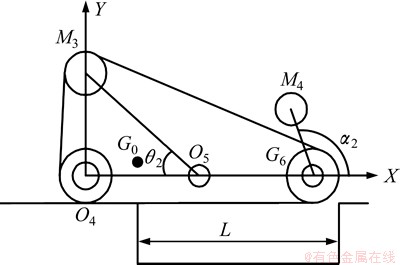
图12 爬越桥沟
Fig. 12 Crossing trench
平台质心在当前坐标系的坐标为:
 (9)
(9)
由图12可知桥沟长度L极值:
Lmax=L8-XG0min-R (10)
当 ,θ=0°时,θ2=0°,α2趋近于π时,可得:
,θ=0°时,θ2=0°,α2趋近于π时,可得:
 (11)
(11)
将式(11)代入到式(10)可知
 (12)
(12)
(2) 当机器人平台质心的位置如图11(e)所示时,质心没有越过桥沟,机器人平台的从动轮部分会“掉”入桥沟,如图13所示。
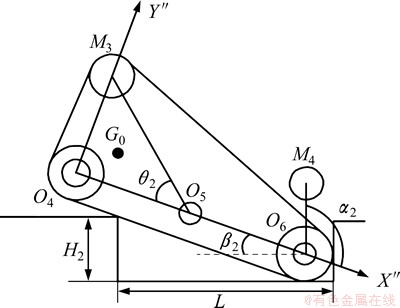
图13 质心未越过桥沟
Fig. 13 Center of mass within opposite side
若机器人能够从桥沟中“爬出”,必须使机器人平台质心跨过桥沟的左边缘线。此时车体长度,桥沟高度,桥沟长度满足几何尺寸关系:
 (13)
(13)
如图7所示,当 达到最大值Hmax时,所对应的仰角为βmax;当XG0取到极小值时,可得深度极值。当,θ=0°时,θ2=0°;当α2趋近于π时,取仰角β的极大值βmax。将式(11)中XG0min代入式(13)可得深度的极大值为:
达到最大值Hmax时,所对应的仰角为βmax;当XG0取到极小值时,可得深度极值。当,θ=0°时,θ2=0°;当α2趋近于π时,取仰角β的极大值βmax。将式(11)中XG0min代入式(13)可得深度的极大值为:

 (14)
(14)
此时,对应的桥沟长度L最大值Lmax为

 (15)
(15)
3 样机越障能力测试与分析
主臂可变构型履带机器人样机的主要参数为:m1=25 kg,m2=5 kg,m3=2 kg,L1=L4=L8=330 mm,L3=L7=125 mm,L6=660 mm,R=76 mm,L2=L5=437~547 mm,P1=70 mm,b0=660 mm。对样机进行越障性能测试。图14所示分别为样机实现攀爬台阶、横向攀越方向相反的连续两斜坡、正面、侧面斜坡仰角,爬越桥沟的动作截图,测试结果见表4。
(1) 将参数代入式(2)中,得出机器人攀爬台阶高度H与α和θ的关系如图15所示。由计算结果可知:当θ=135°,α=40°时, 有最大值Hmax=231.9 mm。
有最大值Hmax=231.9 mm。
(2) 将机器人参数代入式(6)和(7),得出坡度仰角α1和α3与α和θ的关系分别如图15和16所示:坡度的理论最大值与测量值见表4。
(3) 将参数代入式(14)和(15)中,可得桥沟长度最大值Lmax=356.6 mm,桥沟深度最大值H2max=228.7 mm。实际越障过程中质心位置与理论计算会有一定误差,并且与装配精度、驱动力、接触面之间的摩擦因数等有关。为了测试其越障性能,除侧面斜坡仰角(实验条件所限、保护机器人)外,在进行越障能力测试时,均选择稍大于理论最大值的实际测试环境。机器人均能顺利通过。
表4 样机越障能力理论与实测值
Table 4 Theoretical and test values of robot prototype
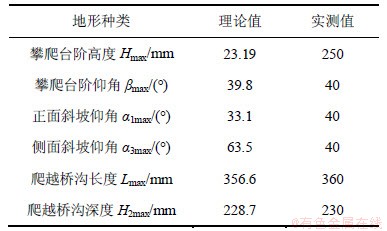

图14 样机实验
Fig. 14 Test of prototype
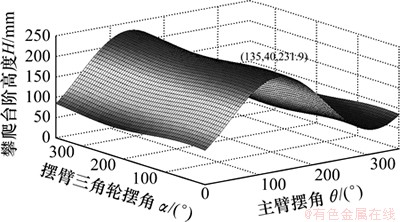
图15 攀爬高度H与主臂摆角θ、摆臂摆角α关系
Fig. 15 Relationship among H, θ and α
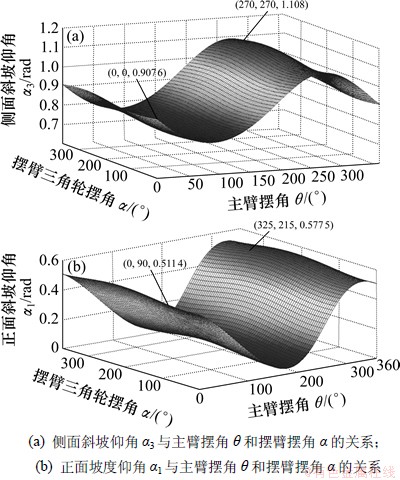
图16 正面、侧面坡度仰角与主臂摆角和摆臂摆角关系
Fig. 16 Relationship among α1, α3, θ and α
4 结论
(1) 阐述了主臂可变构型履带式机器人平台的基于椭圆轨迹形成的构型原理。
(2) 从运动学的角度对平台攀爬台阶、攀爬斜坡,爬越桥沟进行了机理及性能分析,绘制了相关参数图形,推导出最大越障性能参数。
(3) 制作了样机并进行了样机越障实测,实验结果表明机器人实际越障性能与理论计算结果相近,具备了良好的运动及越障性能。
参考文献:
[1] 陈白帆, 蔡自兴, 邹智荣. 一种移动机器人SLAM中的多假设数据关联方法[J]. 中南大学学报: 自然科学版, 2012, 43(2): 522-527.
CHEN Baifan, CAI Zixing, ZOU Zhirong. A multiple hypotheses data association method in mobile robot SLAM[J]. Journal of Central South University: Science and Technology, 2012, 43(2): 522-527.
[2] Kwon H J, Shim H, Kim D, et al. A development of a transformable caterpillar equipped mobile robot[C]//International Conference on Control, Automation and Systems. Seoul, Korea: IEEE, 2007: 1062-1065.
[3] ZENG Wenjing, WAN Lei, ZHANG Tiedong, et al. Simultaneous localization and mapping of autonomous underwater vehicle using looking forward sonar[J]. Journal of Shanghai Jiaotong University: Science, 2012, 17(1): 91-97.
[4] 刘金国, 王越超, 李斌, 等. 灾难救援机器人研究现状、关键性能及展望[J]. 机械工程学报, 2006, 42(12): 1-12.
LIU Jinguo, WANG Yuechao, LI Bin, et al. Current research, key performances and future development of search and rescue robot[J]. Chinese Journal of Mechanical Engineering, 2006, 42(12): 1-12.
[5] Garretson J, Hobart C, Salton J R. Gemini-scout mine rescue robot[C]//AUVSI Unmanned Systems North America Conference 2011. Washington, D C, United States, 2011: 1385-1399.
[6] 李允旺, 葛世荣, 朱华, 等. 四履带双摆臂机器人越障机理及越障能力[J]. 机器人, 2010, 32(2): 157-165.
LI Yunwang, GE Shirong, ZHU Hua, et al. Obstacle-surmounting mechanism and capability of four-track robot with two swing arms[J]. Robot, 2010, 32(2): 157-165.
[7] Karkoub M, Her M G, Huang C C, et al. Design of a wireless remote monitoring and object tracking robot[J]. Robotics and Autonomous Systems, 2012, 60(2): 133-142.
[8] 李允旺, 葛世荣, 朱华. 摇杆式轮履结合机器人: 中国, CN101554890[P]. 2009-01-28.
LI Yunwang, GE Shirong, ZHU Hua. A rocker-type wheel-track complex robot: China, CN101554890[P]. 2009-01-28.
[9] Choi B S, Song S M. Fully automated obstacle-crossing gaits for walking machines[J]. IEEE Transactions on Systems, Man and Cybernetics, 1988, 18(6): 952-964.
[10] 贾鹤鸣, 宋文龙, 陈子印. 基于反馈增益反步法的非完整约束移动机器人路径跟踪控制[J]. 吉林大学学报: 工学版, 2012, 42(4): 1003-1007.
JIA Heming, SONG Wenlong, CHEN Ziyin. Path-following controller for non-holonomic mobile robots based on feedback gain backstepping[J]. Journal of Jilin University: Engineering and Technology Edition, 2012, 42(4): 1003-1007.
[11] 邓星桥, 王进戈, 方纯, 等. 仿人形机器人运动的自适应控制[J]. 西南交通大学学报, 2008, 43(6): 767-771.
DENG Xingqiao, WANG Jinge, FANG Chun, et al. Adaptive control of humanoid robot movement[J]. Journal of Southwest Jiaotong University, 2008, 43(6): 767-771.
[12] 倪修华, 陈维山, 刘军考, 等. 一种由人类步行启发的半被动双足步行机器人[J]. 中南大学学报: 自然科学版, 2011, 42(4): 1028-1034.
NI Xiuhua, CHEN Weishan, LIU Junkao, et al. A quasi-passive dynamic walker inspired by human walking[J]. Journal of Central South University: Science and Technology, 2011, 42(4): 1028-1034.
[13] 赵铁石, 林永光, 缪磊, 等. 一种基于空间连杆机构的蛇形机器人[J]. 机器人, 2006, 28(6): 629-635.
ZHAO Tieshi, LIN Yongguang, MIAO Lei, et al. Snake-like robot based on spatial linkage mechanism[J]. Robot, 2006, 28(6): 629-635.
[14] 李允旺, 葛世荣, 朱华. 摇杆式履带悬架的构型推衍及其在煤矿救灾机器人上的应用[J]. 机器人, 2010, 32(1): 25-33.
LI Yunwang, GE Shirong, ZHU Hua. Deduction of the rocker-type track suspension configurations and their applications to coal mine rescue robots[J]. Robot, 2010, 32(1): 25-33.
[15] 赵海峰, 李小凡, 姚辰, 等. 新型轮腿履带复合移动机构及稳定性分析[J]. 机器人, 2006, 28(6): 576-581.
ZHAO Haifeng, LI Xiaofan, YAO Chen, et al. A novel wheel-leg-track complex mobile mechanism and its stability analysis[J]. Robot, 2006, 28(6): 576-581.
[16] Kim Y G, An J, Kwak J H, et al. Design and development of terrain-adaptive and user-friendly remote controller for wheel-track hybrid mobile robot platform[J]. Journal of Institute of Control, Robotics and Systems, 2011, 17(6): 558-565.
[17] 李智卿, 马书根, 李斌, 等. 轮―履复合可变形机器人的移动机构参数分析[J]. 中国机械工程, 2009, 20(19): 2320-2326.
LI Zhiqing, MA Shugen, LI Bin, et al. Parameter analysis for mobile mechanism of a transformable wheel-track robot[J]. China Mechanical Engineering, 2009, 20(19): 2320-2326.
[18] 丁希仑, 徐坤. 一种新型变结构轮腿式机器人的设计与分析[J]. 中南大学学报: 自然科学版, 2009, 40(1): 91-101.
DING Xilun, XU Kun. Design and analysis of a novel metamorphic wheel-legged rover mechanism[J]. Journal of Central South University: Science and Technology, 2009, 40(1): 91-101.
[19] 刘少刚, 郭云龙, 赵华鹤, 等. 一种基于椭圆原理的双V型可变履带越障机构: 中国, CN102407889A[P]. 2012-04-11.
LIU Shaogang, GUO Yunlong, ZHAO Huahe, et al. A double "V" obstacle-crossing mechanism based on ellipse forming principle with track and variable configuration: China, CN102407889A[P]. 2012-04-11.
[20] 刘少刚, 郭云龙, 周钊, 等. 主臂可变构型式越障机构: 中国, CN102248970A[P]. 2011-11-23.
LIU Shaogang, GUO Yunlong, ZHOU Zhao, et al. A obstacle-crossing mechanism with variable main arm configuration: China, CN102248970A[P]. 2011-11-23.
(编辑 杨幼平)
收稿日期:2012-06-16;修回日期:2012-08-28
基金项目:国家自然科学基金资助项目(60775060)
通信作者:郭云龙(1988-),男,辽宁锦州人,博士研究生,从事机器人设计理论及控制研究;电话:15846588241;E-mail:guoyunlongbs@hrbeu.edu.cn

