基于Smith预估的神经滑模控制方法
在时滞系统中的应用
赵宝永1,齐英剑2
(1. 北京科技大学 自动化学院,北京,100083;2. 中国传媒大学 理学院,北京,100024)
摘要:为了解决控制系统中的时滞及参数摄动和外界干扰对系统的影响等问题,提出基于Smith预估的神经滑模控制方法,既利用Smith预估对滞后被控对象的补偿作用,又充分发挥滑模变结构控制在设计控制器时与被控对象参数及扰动无关的特性,使得系统在受到参数摄动和外干扰时具有不变性,增强系统的鲁棒性能,提高系统的控制品质。通过仿真研究,得到较为满意的控制效果。
关键词:Smith预估;神经滑模控制;时滞系统
中图分类号:TP13 文献标志码:A 文章编号:1672-7207(2011)S1-1015-05
Application of neural sliding mode control method based on Smith pre-estimation in time-delay system
ZHAO Bao-yong1, QI Ying-jian2
(1. School of Automation and Electrical Engineering, University of Science and Technology Beijing,
Beijing 100083, China;
2. Science School, Communication University of China, Beijing 100024, China)
Abstract: In order to solve the problems of the impact about the time delay of control system and parameter perturbation and outside interference, the neural sliding control method based on Smith pre-estimation proposed. The compensation function of Smith pre-estimation was used to the controlled delay object, and the irrespective characteristic between sliding mode control and parameter or interference of the controlled object was given full play when the controller was designed. This method makes the system invariance with the system parameters perturbation and outside interference, the robust performance and the control quality of the system were enhanced. The simulation result approves that this method is effective and significant.
Key words: Smith pre-estimation; neural sliding mode control; time-delay system
广泛存在于工业过程控制中的纯滞后现象,给控制过程稳定性和精确性的实现增加了一定的难度。滞后特性的存在使得超调量不能及时反映控制作用的变化,且当被控对象的参数改变或者由于外界干扰的存在而使超调量波动时,控制器所产生的控制作用无法及时对干扰进行补偿,这也就是滞后系统在控制中必然存在较长调节时间和较大超调量的原因,系统的控制品质便大大下降。
为了解决控制系统中的纯滞后问题,本文作者提出了将史密斯(Smith)预估补偿方法应用于神经滑模控制中,这样既利用Smith预估对滞后被控对象的补偿作用,又充分发挥滑模变结构控制在设计控制器时与被控对象参数及扰动无关的特性,使得系统在受到参数摄动和外干扰时具有不变性,增强系统的鲁棒性能,从而提高系统的控制品质。
1 Smith预估补偿控制原理
具有滞后环节的控制系统结构如图1所示。图1中:rin是系统输入;yout是系统输出;D是系统的外界干扰。

图1 具有滞后环节的控制系统闭环控制结构
Fig.1 Closed-loop control structure of control system with time-delay
系统的闭环传递函数为:
 (1)
(1)
特征方程为:
 (2)
(2)
从式(2)可以看出:特征方程中具有纯滞后环节,使得系统的稳定性降低;当滞后τ较大时,系统变得不稳定。系统反馈信号由图1中的1点引出,因而增加了特征方程中的滞后环节;如果将反馈信号由2点引出,滞后环节便不会出现在控制回路当中,提高了控制品质。但是,这样的2点在实际当中不是总能引出,Smith预估方法解决了此类问题。
Smith预估补偿原理如图2所示[1]。图2中:rin是系统输入;yout是系统输出;u是控制量;D是系统的外界干扰;ym,out是Smith滞后输出;xm,out是Smith无滞后输出。
从图2可以看出:如果预估模型Gm(s)与被控对象模型Gp(s)精确匹配,即
Gm(s)=Gp(s), τ=τm (3)
则系统的闭环传递函数变为
 (4)
(4)

图2 Smith预估补偿原理
Fig.2 Smith predictor principle
这时系统的特征方程为
 (5)
(5)
可见,特征方程中已经不含有滞后环节,提高了系统的控制性能。这时,有

 (6)
(6)
2 滑模变结构控制
滑模变结构控制[2-3]本质上是一类特殊的非线性控制,控制的不连续性是其非线性的直观表现,系统的“结构”不固定也成为此种控制策略与其他常规控制的相异之处,同时具有一种使系统“结构”随时间变化的开关特性,且在动态过程中,根据系统当前状态(偏差及其各阶导数等)有目的的不断变化,迫使系统按照预定的“滑动模态”的状态轨迹做小幅度的高频率上下运动。由于滑动模态可以加以设计并且与对象参数以及扰动无关,这就使得变结构控制具有了快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单以及较好的鲁棒性等优点。
2.1 滑动模态定义及数学表达
在一般的情况下,设系统
 x
x Rn (7)
Rn (7)
切面s(x)=s(x1, x2, …, xn)=0在系统空间中将状态空间分成s>0和s<0上下2部分,如图3所示。

图3 滑模切换面上各点特性
Fig.3 Point feature of sliding mode switching surface
根据滑动模态区上的运动点都必须是终止点的要求,当运动点到达切换面s(x)=0临近区域时,就会被“吸引”到该区域内运动,则有
 (8)
(8)
 (9)
(9)
该不等式对系统提出如下李雅普诺夫函数的必要条件:
 (10)
(10)
由于在切换面邻域内,函数式(10)是正定的,而按照式(9),s2的导数是负半定的,即在s=0附近v是一个非增函数,因此,如果满足条件式(9),则式(10)是系统的一个条件李雅普诺夫函数。系统本身稳定于条件s=0 [3]。
2.2 滑模变结构控制定义
设控制系统
 xRn, yRm, tR (11)
xRn, yRm, tR (11)
需要确定切换函数:
s(x), sRm (12)
求解控制函数:
 (13)
(13)
其中: ,使得滑模动态存在,即式(13)成立;满足可达性条件,在切换面s(x)=0以外的运动点都将在有限的时间内到达切换面;保证滑模运动的稳定性。只有满足以上3个基本问题的控制才被称作滑模变结构控制。
,使得滑模动态存在,即式(13)成立;满足可达性条件,在切换面s(x)=0以外的运动点都将在有限的时间内到达切换面;保证滑模运动的稳定性。只有满足以上3个基本问题的控制才被称作滑模变结构控制。
3 基于Smith预估的神经滑模控制
基于Smith预估的神经滑模控制结构如图4所示。
将滑模切换函数作为RBF网络的输入,滑模控制器作为RBF网络的输出,利用神经网络的学习功能,从而实现神经滑模控制[4]。被控对象设为:
 (14)
(14)
设输入信号指令为rin(t),切换函数为
 (15)
(15)
其中: ,
, 。
。
将滑模控制器设计为RBF网络的输出,即
 (16)
(16)
式中:m是隐含层神经元个数。
控制目标是使 ,则RBF网络的权值调整目标为
,则RBF网络的权值调整目标为
 (17)
(17)
 (18)
(18)
其中:η>0。
由于
 (19)
(19)
 (20)
(20)
故RBF网络权值学习算法为
 (21)
(21)
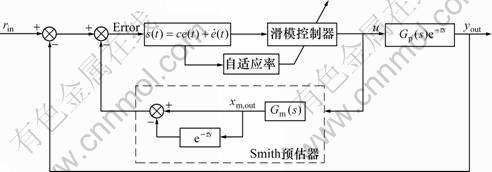
图4 基于Smith预估的神经滑模控制结构
Fig.4 Neural sliding mode control structure based on Smith pre-estimation
4 仿真研究
设被控对象为[2-3, 5-7]
 (22)
(22)
式中:u(t)为控制输入;d(t)为外加干扰。
系统输入取为rin(t)=0.5sin(10πt),干扰输入为d(t)=0.10sin(2πt)同时给被控对象施以300 ms的延迟。取c=25,则滑模切换函数为 。RBF神经网络的初始权值取为随机数,网络结构取为1-5-1。高斯函数参数分别取为c=[-3 -1.5 0 1.5 3],b=[1 1 1 1 1]T。设系统的初始状态为[-1.5 0],采用神经滑模控制率式(19),取γ=1.5,仿真结果如图5~8所示。
。RBF神经网络的初始权值取为随机数,网络结构取为1-5-1。高斯函数参数分别取为c=[-3 -1.5 0 1.5 3],b=[1 1 1 1 1]T。设系统的初始状态为[-1.5 0],采用神经滑模控制率式(19),取γ=1.5,仿真结果如图5~8所示。
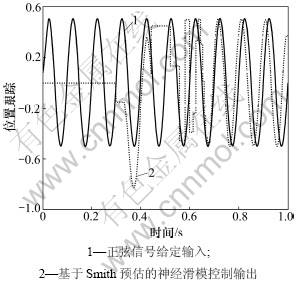
图5 基于Smith预估的神经滑模控制输入位置跟踪
Fig.5 Input location tracking of neural sliding mode control structure based on Smith pre-estimation
从以上仿真结果可以看出:使用Smith预估的神经滑模控制方法可以对滞后被控对象起到很好的控制效果;系统输出能够很好地跟踪以上给定的输入;系统的快速性和稳定性都比较理想,在存在外界干扰的情况下,系统的鲁棒性明显增强。与不使用Smith预估的控制方法相比,系统的输出不能跟踪上给定输入,很快发散,控制品质较差。

图6 基于Smith预估的神经滑模控制相轨迹
Fig.6 Phase trajectory of neural sliding mode control structure based on Smith pre-estimation
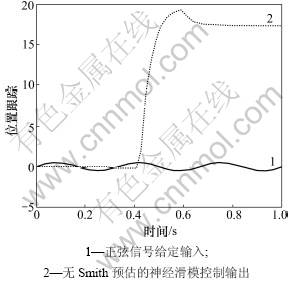
图7 无Smith预估的神经滑模控制输入位置跟踪
Fig.7 Location tracking of neural sliding mode control structure without Smith pre-estimation

图8 无Smith预估的神经滑模控制相轨迹
Fig.8 Phase trajectory of neural sliding mode control structure without Smith pre-estimation
5 结论
采用基于Smith预估的神经滑模控制方法对具有滞后的被控对象进行控制,可以很好地解决滞后对系统控制性能的影响,增强系统的快速性和稳定性,在外加干扰存在的情况下,系统的鲁棒性能得到提高。
但是,当Smith预估模型Gm(s)与被控对象模型Gp(s)不能精确匹配时,即

可知系统的特征方程中仍然会存在滞后环节,系统的稳定性降低,当不精确匹配时,甚至会出现较差的控制效果。为了满足预估模型与被控对象的实时精确匹配,可以使用RBF网络隐式实现Smith预估补偿的能力,从而实现较好的控制效果。
参考文献:
[1] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2005.
LIU Jin-kun. Advanced PID control MATLAB simulation [M]. Beijing: Electronics Industry Press, 2005.
[2] 李颖, 朱伯立, 张威. Simulink动态系统建模与仿真基础[M]. 西安: 西安电子科技大学出版社, 2004.
LI Ying, ZHU Bo-li, ZHANG Wei. Dynamic system modeling and simulation based on simulink [M]. Xi’an: Xi’an Electronic and Science University, 2004.
[3] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2005.
LIU Jin-kun. Matlab simulation for sliding mode control [M]. Beijing: Tsinghua Univesity Press, 2005.
[4] 吴学礼, 贾辉然, 等. 非线性过程的智能控制方法研究与应用[M]. 北京: 国防工业出版社, 2006.
WU Xue-li, JIA Hui-ran, et al. Intelligent control method research and application for the nonlinear process [M]. Beijing: National Defense Industry Press, 2006.
[5] 高宏宇, 邵克勇, 李艳辉. 不确定系统的上界自适应动态神经滑模控制[J]. 吉林大学学报: 信息科学版, 2010, 28(3): 292-297.
GAO Hong-yu, SHAO Ke-yong, LI Yan-hui. Upper bound adaptive dynamic neural sliding mode control of uncertain systems [J]. Journal of Jilin University: Information Science Edition, 2010, 28(3): 292-297.
[6] 李志民, 韩绪鹏, 孙勇, 等.可控串联补偿的神经滑模控制器设计[J]. 电力系统及其自动化学报, 2010, 22(1): 101-105.
LI Zhi-min, HAN Xu-ping, SUN Yong, et al. Design of neural network sliding mode controller for thyristor controlled series compensation [J]. Journal of Electronic Power System and its Automation, 2010, 22(1): 101-105.
[7] 赵东亚, 邹涛, 王治平, 等. 基于Smith预估器的积分切换增益滑模控制[J]. 计算机与应用化学, 2010, 27(6): 756-758.
ZHAO Dong-ya, ZOU Tao, WANG Zhi-ping, et al. Smith predictor based sliding mode control with integral type switching gain [J]. Computers and Applied Chemistry, 2010, 27(6): 756- 758.
(编辑 李艳红)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:北京市重点学科建设项目(XK100080537)
通信作者:赵宝永(1978-),男,辽宁朝阳人,博士,讲师,从事模式识别与智能控制研究;电话:010-62332805; E-mail: ustbzby@163.com

