DOI: 10.11817/j.issn.1672-7207.2018.01.011
�����˶�ƽ̨�ṹ�Ż���ʵ��
���1���μ���1�����1����˧2
(1. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
2. ���ϴ�ѧ ��Ϣ����ѧԺ������ ��ɳ��410083)
ժҪ��Ϊʵ��һ��ֱ����������������˶�ƽ̨����ƣ���������С���˶�������Simulink-M�ļ���Ϸ���ķ��������StribeckĦ��ģ�ͣ�̽���˶�ƽ̨˿�ܡ�ͬ��������ؽṹ�����Ȳ������˶�ƽ̨���ȵ�Ӱ�졣ͨ�����������ʵ��ʹ�õ�Ҫ����ƽ̨���Žṹ��ơ�ʹ��EMAC200��������XL-80�������ϵͳ���˶�ƽ̨����ʵ�ʲ��ԡ��о�����������˶�ƽ̨�����Ҫ��˿�ܵ��̡�ͬ���������ȼ����Ǿ��ȵ�Ӱ�죻���ŵ��̼�С����������������ߣ���̬���ʼ�С���ƣ����г�Ϊ1 mmʱ����̬����ڡ�1.5 ��m֮�ڣ����ҿ��Դﵽ50 nm��ʵ�ʷֱ��ʣ�ͨ��Simulink-M�ļ���Ϸ��淽��������ʵ�־����˶�ƽ̨���ָ��ӷ�����ϵͳ�Ľṹ�Ż������ϵͳʵ�ʵĶ�λ���ȡ�
�ؼ��ʣ������˶�ƽ̨��Simulink-M��Ϸ��棻�ṹ�Ż������
��ͼ����ţ�TN252 ���ױ�־�룺A ���±�ţ�1672-7207(2018)01-0080-07
Structure optimization and achievement of sub-micron optical motion platform
XU Cong1, DUAN Jian1, TANG Hao1, LI Shuai2
(1. State Key Laboratory of High Performance and Complex Manufacturing, Central South University, Changsha 410083, China;
2. School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: In order to design a sub-micro platform driven by DC motor and reduce its motion errors as much as possible, an method which was based on hybrid simulation by Simulink-M and a stribeck friction model, the impact of ball screw and synchronous belt on the motion error was analyzed. The structure was optimized based on the analysis results and the demand. The motion platform was tested with the EMAC 200 controller and XL-80 laser interferometer system. The results show that the motion error is mainly affected by the ball screw��s lead, synchronous belt��s transmission ratio and their accuracy. Error will reduce when the lead decreases, ratio increases as well as their accuracy is improved. The error is within ��1.5 ��m when the displacement is 1 mm and a 50 nm actual resolution can be achieved for this platform. The high-precision motion platform, as a complex nonlinear system, can be optimized based on hybrid simulation by Simulink-M.
Key words: precision motion platform; hybrid simulation by Simulink-M; structure optimization; error
���ų����ܼӹ����뵼�塢�����졢�����ͨѶ�����ķ��ٷ�չ�����ǶԾ����˶�ƽ̨�ľ���Ҫ��Խ��Խ��[1-3]���ر����������ʹ���������ͨ������������ij��֣����ǶԹ������Ͼ���Ҫ��Խ��Խ��[4]�������������Ͼ�����Ҫ�ɴ������˶��Ĺ�ѧ�˶�ƽ̨��������Ϊ����ӷ�װ�����������������˶�ƽ̨�˶���������߹�������Ч�ʵĻ�����Ϊ��ø��ߵĶ�λ���Ⱥͷֱ��ʣ������������˶�ƽ̨������������͵Ľṹ��ֱ�ߵ����ѹ���մɡ���Ȧ�����������ʽ������Խ�������������ȵ�������������˶�������һ���µĽ�[5-8]����Ȼ��Щ���ͽṹ���зֱ��ʸߡ����϶��Ħ��С���ص㣬�����ڹ���˿�ˡ���������ṹ��ϵͳ���Ժã��Կ�����Ҫ��ϵͣ�����ʵ��³�����ƣ����Ҽ������졢�ɱ�������ͨ���ʵ��Ľ�����ʵ�ִּ���λ[9-10]����ˣ�����˿�ܡ����������ھ����˶�ƽ̨��ʹ������Ȼռ��������λ��Ϊ�ˣ��������߲���ͬ����������˿�ܡ�������鵼��ṹ�����һ�����ֱ������������˶�ƽ̨������ʵ�������˶��������˶�ƽ̨��Ҫ�����ѵ�������μ������˶�ƽ̨���������Բ��ö���ϵͳ���۽��з����������������ʾ����ϵͳ�и��������λ�ü���̬���Ӷ�������ݷ���[11-12]�������ڴ���Ħ��������������������϶�ȷ���������[13]���˶�ƽ̨�����������̬���������봫�����ϵĸ�����������йأ��������������������������Լ��ߴ���йء������˶�ƽ̨�Ķ�̬�������ṹ������ϣ�̽������֮��Ĺ�ϵ�����������������СΪĿ����˶�ƽ̨�ṹ���Ż���ơ��������߲���Simulink-M�ļ���Ϸ��淽�������˶�ƽ̨�Ķ�̬�������ṹ����֮��Ĺ�ϵ���з������Ӷ�ʵ���˶�ƽ̨�ṹ�Ż���Simulink��MATLAB�п�ͼʽ�ķ��滷�������Կ�ݵؽ���ϵͳ�Ĵ��ݺ�����M�ļ�ͨ������ִ�У����Կ���ʵ��ѭ�������ݴ�������Ϸ������������Simulink�н���ϵͳģ�ͣ���ͨ��M�ļ�����غ�������Simulink����ز�����Ȼ��Simulink����õ���̬�����Բ�ͬ�ṹ�������õ��������з������Ӷ��õ��������˶�ƽ̨���֮��Ĺ�ϵ���ﵽ�˶�ƽ̨�ṹ�Ż���Ŀ��[4]��
1 ����DC�����������˶�ƽ̨��ģ
1.1 ƽ̨�ṹ
������Ƶ�ƽ̨����ֱ�����������ͬ����������˿�ܴ�����������鵼�쵼��ṹ��˿�ܺ�ͬ���������ṹ���нϴ�Ĵ����ȣ���ϸ߷ֱ��ʵ�TONIC��դ���Լ�ֱ�����ٻ���ʹ�˶�ƽ̨���кܸ߷ֱ��ʡ�����ֱ������������˶�ƽ̨������Ӧ�죬���Ҿ��и��õĵ����ȶ��ԡ���С����������鵼����洫ͳ��ֱ�ߵ��죬���ڼ����˹���ѭ�����ڣ���ˣ������С�����Ⱥ��Ը��ߡ����������Ƕʽ���֣��˶�ƽ̨�ṹ���ӽ��գ���������߶�άϵͳ�����徫�ȡ�
1.2 �˶�ƽ̨���Ʒ�ʽ
�˶�ƽ̨����λ�á��ٶȡ�����������������ͼ1��ϵͳλ�÷�������5 nm�ֱ��ʵĹ�դ�ߣ��ٶȻ�����ʹ�ø߷ֱ��ʵ�ֱ�����ٻ�����������ֱ�Ӽ����ڵ���������ڣ������������е�����ʹ��EMAC200��Ϊϵͳ������������PID�㷨ͨ��PWM�Ե�����е��ٿ��ƣ��Ӷ�����˶�ƽ̨���˶����ơ�

ͼ1 �˶�ƽ̨���ƺʹ���ʾ��ͼ
Fig. 1 Control and transmission diagram of platform
1.3 ���������ѧģ��
�������о����˶�ƽ̨����������������Լɵ��衢�����ɵĵ�Ч��·��ͬ��������Լ�2������һ��ת�����������Ტͨ���������ӵ��ִ���ϵͳ������˿�ܵ�ת������ĸ֮������ӿ��Ե�ЧΪ����һ��б�ȵ����ƿ��ĵ������ỷ�ڣ���ͼ2��
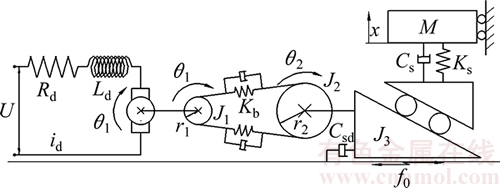
ͼ2 �˶�ƽ̨��Чģ��
Fig. 2 Equivalent model of platform
ͼ2�У�LdΪ�綯�������У�RdΪ������裻idΪ���������UΪ�綯�������ѹ����1Ϊ�綯��ת�ǣ���2Ϊ��ͬ����ת�ǣ�r1��r2�ֱ�ΪС����Ƥ����ֱ����J1ΪС���ּ����ת��ת������֮�ͣ�J2Ϊ�����ת��������J3Ϊ˿�ܵ�ת��������KbΪƤ���ľ���ϵ����CsdΪ˿�ܵ�ת������ϵ����MΪƽ̨��������f0Ϊ�˶�ƽ̨��Ħ������Ks˿������ĸ��ĸնȣ�xΪƽ̨λ�ƣ�CsΪ˿����ĸ�ݸ˼������ϵ����
1.3.1 ֱ�������ѧģ��
ֱ�����ͨ���ı�����ѹU ����ת�ٵ��ڡ����ݵ綯����·��ѹ���̡�ת�ٺ͵��������Լ�ϵͳ����ѧ����[14]���ɵõ�ֱ������Ļ�����Ϸ��̣�Ȼ�����������ϱ任���õ�ֱ�������ת�Ƕ�������ѹ�Ĵ��ݺ���Ϊ

 (1)
(1)
ʽ�У�KmΪת�س�����JRΪ������ϵĵ�Чת��������CRΪ������ϵ�Ч���ᡣ
1.3.2 ͬ����������ѧģ��
ͬ������ģ���Ƚ�ͬ����ת��������Ч��������ϣ��������Ϊ2������һ��Ԥ�����ĵ��ɣ������������������������ݼ�Ƥ��ģ�Ϳɵõ�ϵͳ����ѧģ�ͣ�Ȼ�����������ϱ任���ɵ�Ƥ��������ǶȺ�����ǶȵĴ��ݺ���Ϊ
 (2)
(2)
1.3.3 ����˿�ܴ�����ѧģ�ͽ���
����˿�ܵ�ת������ĸ֮������ӵ�ЧΪ1���������ỷ�ڣ�˿������ĸ������1������һ��б�ȵ�2���ƿ��ʾ[15]�����ǵĴ�����Ϊ (���У�LΪ����˿�ܵ���)������ѧƽ�ⷽ��Ϊ��
(���У�LΪ����˿�ܵ���)������ѧƽ�ⷽ��Ϊ��
 (3)
(3)
 (4)
(4)
ʽ�У�M fΪ����˿�ܵ��������ء�
����ʽ(3)��(4)������ ���ƴ���������������ϱ任���õ�̨��λ����˿��ת�ǵĴ��ݺ���Ϊ
���ƴ���������������ϱ任���õ�̨��λ����˿��ת�ǵĴ��ݺ���Ϊ

 (5)
(5)
2 ����Simulink-M��Ϸ������
2.1 Simulink-M��Ϸ������
Simulink��Matlab�п�ͼʽ����ģ�飬���нṹ��������ģѸ�ٵ��ŵ㣬��ʵ��ѭ����Ѱ�ŵȲ������ӣ�ִ��Ч�ʵ͡�M�ļ���̻�������ִ�У������ݴ����Ϸ��㣬������ṹ���ӣ��Ը���ģ�ͽ�ģ������[16]���������߽������������ͨ��M�ļ�set_param( )��������Simulinkģ���еIJ�����sim( )��������Simulink�������棬������Simulink��OUT���ģ�齫��̬��������workspace�У�����M�ļ���meshgrid( )����������������㡢surf( )�������л�ͼ�������̬�����ṹ�����Ĺ�ϵ�������ﵽ�Ż�ϵͳ�ṹ��Ŀ�ġ�����Simulink-M��Ϸ���ʾ��ͼ��ͼ3��
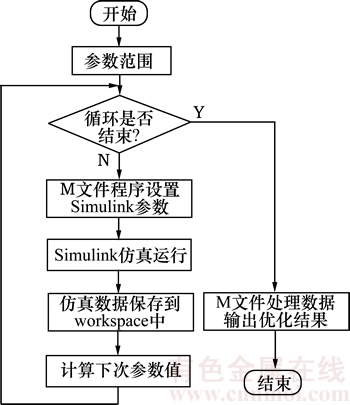
ͼ3 ����Simulink-M��Ϸ���ʾ��ͼ
Fig. 3 Sketch of hybrid simulation based on Simulink-M
2.2 STRIBECKĦ��ģ��
���˷���Ħ����֮���ڵ�����Ħ���������ٶȵ����Ӷ���С[17]����ͼ4(a)��ʾ����ģ�ͺܺõ������˵��١���Ħ����Ϊ������StribeckЧӦ�Ĵ��ڣ�Ħ�������������ȶ�ЧӦ���ܹ��Ϻõ�ģ���˶�ƽ̨�г�ʱ��Ħ�������
��Simulink�У������1������StribeckĦ��ģ�͵ķ���ģ�飬ͨ����������õ���Ħ�����߿��Ժܴ�̶ȵ�ģ��StribeckĦ�����ߣ���ͼ4(b)��ʾ��
2.3 ˿�ܰڶ�����ͬ�����������ģ��
˿����ͬ����������ת��������̺ʹ������������һ�������ԣ�����˿�˵ĵ���������ۼ����E����˿����ת���������Ա仯�İڶ����e��ɣ���ͼ5��ͬ���������������ͬ�����ֽھ������أ�Ҳ��1����������
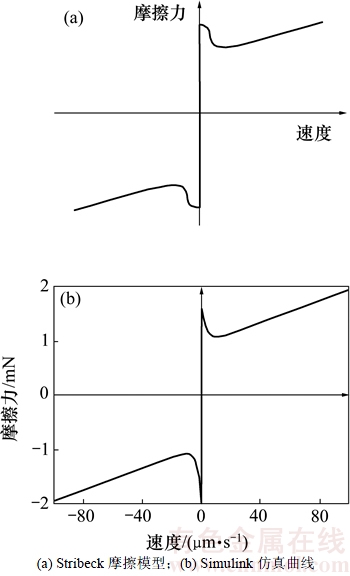
ͼ4 Stribeck����Simulink��������
Fig. 4 Curves of Stribeck and Simulink
��Simulink�ڣ�ʹ��1������ģ�������ģ��֮��ģ��ʵ�ʵ�˿�˵��̡�ͬ���������ȵ���
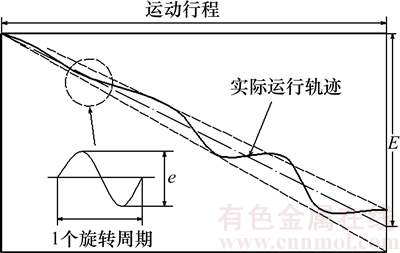
ͼ5 ˿�ܵ������
Fig. 5 Error of ball screw lead
2.4 ϵͳSimulinkģ��
ͼ6��ʾΪϵͳ�ıջ�Simulink��ͼ������PID���ơ�ʽ(1)���õ���ֱ��������ݺ���(���������ʹ�������Ѿ�ȷ��)��ʽ(2)���õ�ͬ�������ݺ�����ʽ(5)���õ�˿�˴��ݺ�������������š�StribeckĦ��ģ�͵ȣ�����Stepģ��ģ��ϵͳ���룬Backlashģ��ģ��˿�ˡ�ͬ���������϶�����У����ϵͳ�ṹ������˿�ܵ���L��ֱ��D������La��ͬ���������ȵ���R��ͬ��������B��ͬ��������Ra����ֵͨ��M�ļ�����(ģ���к����˼�С�����)��ͼ7��ʾΪSimulink���ν�Ծ�����������У�EsΪ��̬��ͨ��M�ļ������ȶ�ʱ����(100~200 ms)���λ������Сλ��֮�����(��ʵ�ʹ����У�ֻͨ��M�ļ�����Es�������н�Ծ��Ӧ��ͼ)��
���Ϸ�����̣�����ͨ��M�ļ�������ز���(˿�ܵ���L��ֱ��D������La��ͬ���������ȵ���R��ͬ��������B��ͬ��������Ra)��Ȼ��ÿ�η������ɵ����ͨ��Simulink�е�outģ�������workspace�У����ͨ��M�ļ��������ݡ������ʼ�趨PID������Stribeckģ�������Ħ���������ڷ�������У�˿�ܵ���L��1~5 min��ֱ��D��4~8 mm��˿�ܾ���La��0.001~0.01 mm��ͬ���������ȵ���R��0.2~1.0��ͬ��������B��1~10 mm��ͬ��������Ra��0.002~0.010 mm�������Ա仯��
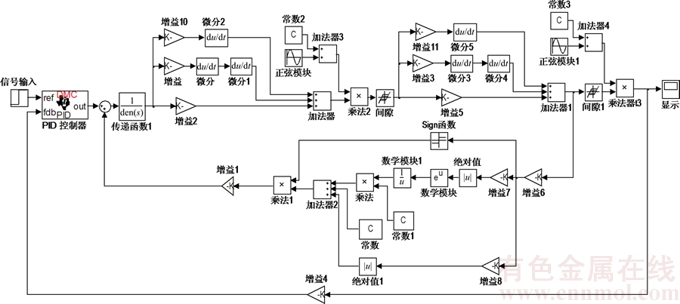
ͼ6 ϵͳSimulink��ͼ
Fig. 6 Frame diagram of Simulink

ͼ7 �˶�ƽ̨ʱ����Ӧ����
Fig. 7 Time domain response of platform
3 ����������
3.1 ��̬����봫���������Ĺ�ϵ
ͨ��Simulink-M�ļ��Ļ�Ϸ��棬�������ѭ����ֱ�õ��˶�ƽ̨1 mm��Ӧ�µ����Es��˿�˵���L��ͬ���������ȵ���R��˿�˾���La��ͬ��������Ra��˿��ֱ��D��ͬ��������B�Ĺ�ϵ����ͼ8��
ͨ�����淢�֣���ͬ���������ȵ���R��0.8���ϡ�˿�˵���L��3 mm����ʱ��ϵͳ��̬���Es�������ֲ��䣻����˿�ܵ���L��3 mm�������ȵ���R��0.8���ϼ�Сʱ����̬���Es���ּ����С����(ͼ8(a))��
�ڴ�������Ӱ�췽�棬����ͬ��������Ra��˿�ܾ���La������ߣ���̬���Es���ϼ�С������̬���Es��˿�ܡ�ͬ����ΪijЩ�ض����ʱ��ͻ�䣬�����ʱӦ������Щ����(ͼ8(b))��
ͨ���о�˿��ֱ��D��ͬ��������Bʱ���֣�2���ṹ����̬���EsӰ������һ�£��������Žṹ��������̬���Es�����Ӻ��С�����м䴦�ﵽ��ֵ������̬���Ea�ı仯���Է�����2���ṹ�仯��������仯�dz�С(ͼ8(c))��

ͼ8 ������
Fig. 8 Results of simulation
3.2 �˶�ƽ̨��������Է���
����������������Ƿ��������������Դ����Ҫ���ݡ��Ż������Խϸߵ���������Լ�Сϵͳ��������ѡ����ʵĽṹ������Ϊ��ֵ����һ�������仯�����죬�Ӷ��õ��ṹ�����ı仯���������KΪ������������ӣ�����ֵ��ṹ�����ı仯���ı�ֵ��ͨ���������棬��2 mm��0.5��0.003 ��m��0.005 ��m��5 mm��6 mm�ֱ���Ϊ˿�˵���L��ͬ���������ȵ���R��˿�˾���La��ͬ��������Ra��ͬ��������B��˿��ֱ��D�Ļ�ֵ����ϵͳ1 ��m�����Ϊ�仯���õ���ֵ����ṹ�����仯���ı���k����ͼ9����ͼ9�ɼ���ͬ������˿�˵ľ��ȶ�ϵͳ����Ӱ�������������ǵĴ����ȼ����̣���˿��ֱ����ͬ�������ȶ����Ӱ����С����ˣ����ýϴ��ͬ���������ȡ���С��˿�˵��̲�������ǵĴ������ȿ�����Ч�ؼ�С�˶�ƽ̨ϵͳ��������

ͼ9 �������������
Fig. 9 Proportion of error sensitivity
4 ʵ�����
ͨ���������������Ͻṹ���Ҫ������ѡ��Ϊ1 mm��ֱ��Ϊ8 mm�����ȵȼ�ΪC3�Ĺ���˿�ˣ�������Ϊ2������Ϊ5 mm�ĸ߾���ͬ������Ϊ�˶�ƽ̨�������������Žṹ����ѡ��EMAC200��������Ϊ�˶�ƽ̨������������˶�ƽ̨���������ƣ���ͼ10��

ͼ10 �˶�ƽ̨����ͼ
Fig. 10 Image of platform test
ʵ�����ʹ��������XL-80�������ϵͳ��ϵͳ��XL-80����ͷ������ֹ⾵�顢XC-80�¶Ȳ�������ɣ�ͨ��PC���������ԣ����Խ����ͼ11��ʾ����ͼ11�ɼ������г�Ϊ1 mmʱ����λ����ڡ�1.5 ��m����(ͼ11(a))���ڽ���50 nm��С�г��˶�ʱ����λ����ȶ��ڡ�10 nm����(ͼ11(b))������ʵ����Ҫ��ͨ�����˶�ƽ̨����1.0 ��m��0.1 ��m���ݶ�λ���Ժ��֣��˶�ƽ̨��С�г��˶�ʱ�߱��ϺõĶ�λ���ܣ��˶�ƽ̨ʵ���������˶�������(ͼ11(c)��ͼ11(d))��
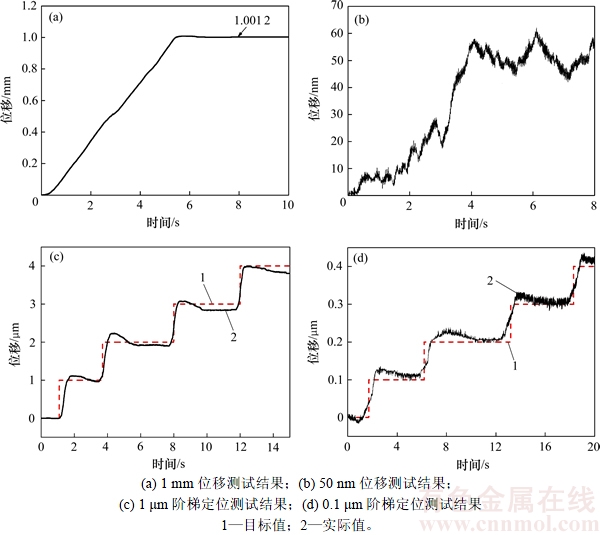
ͼ11 �˶�ƽ̨ʵ�ʲ��Խ��
Fig. 11 Test results of motion platform
ʵ����Խ��������ͨ���Ż��˶�ƽ̨�Ľṹ������DC�����Ĺ�ѧ�����˶�ƽ̨���Դﵽ50 nm���˶��ֱ��ʣ�ϵͳ����������ƫ������ʵ��Ӧ�ã����ڽ���Ϲ켣�滮��ģ��PID���Ʋ��Եȷ�ʽʵ������ϵͳ��ơ�
5 ����
1) ����Simulink-M�ļ���Ϸ���ķ��������Է���صõ�����ֱ������������˶�ƽ̨����봫�����ڵ�����������ȡ��ṹ�Ĺ�ϵ���Ӷ�ʵ�����ָ��ӷ�����ϵͳ���Ż���ơ�
2) ͬ������˿�˵ľ��ȶ�ϵͳ����Ӱ���������Ǵ����ȼ����̣���˿��ֱ����ͬ�������ȶ����Ӱ����С�����ýϴ��ͬ���������ȡ���С��˿�˵��̲�������ǵĴ������ȿ�����Ч�ؼ�С�˶�ƽ̨�˶���
3) ʹ�ù���˿�ܡ�ͬ����������ʽ����ϸ߷ֱ��ʹ�դ�ߡ�����Ӧֱ���������ʵ������ѧ�˶�ƽ̨����ƣ�������Simulink-M�ļ���Ϸ���ķ�������ʵ�ֻ��������СΪĿ����Ż���ơ�
�ο����ף�
[1] ������, ����, ������, ��. ��̻�����ֱ̨�ߵ������ȫ���ٿ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2015, 46(9): 3238-3244.
CHEN Xinglin, LIU Chuan, GENG Changqing, et al. Perfect tracking control for linear motor in wafer stage of lithography[J]. Journal of Central South University (Science and Technology), 2015, 46(9): 3238-3244.
[2] TEO T J, CHEN I M, YANG G. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography. Part I: modeling and analyses[J]. Precision Engineering, 2014, 38(4): 861-871.
[3] ����, �μ���. ����ӷ�װ�������˶�ƽ̨ĩ����̬����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(5): 1290-1295.
YANG Bo, DUAN Jian. Opto-electronics packaging platform for ra-precision position and attitude adjustment[J]. Journal of Central South University (Science and Technology), 2011, 42(5): 1290-1295.
[4] ���˾�, ������, ����ƽ. ��������ѧ�����½�չ[J]. �й���ѧ: ����ѧ ��ѧ ����ѧ, 2015, 45(1): 014201.
WANG Xingjun, SU Zhaotang, ZHOU Zhiping. Recent progress of silicon photonics[J]. Scientia Sinica (Physica, Mechanica & Astronomica), 2015, 45(1): 014201.
[5] �Ÿ�, ��Ʒ��, �Ų�, ��. ֱ�ߵ�������˶�ƽ̨�켣���ٿ��������[J]. ��ѧ���ܹ���, 2013, 21(2): 371-379.
ZHANG Gang, LIU Pinkuang, ZHANG Bo, et al. Design of trajectory tracking controller for precision position table driven by linear motor[J]. Optics and Precision Engineering, 2013, 21(2): 371-379.
[6] CHU C L, FAN S H. A novel long-travel piezoelectric-driven linear nanopositioning stage[J]. Precision Engineering, 2006, 30(1): 85-95.
[7] CHEN Qiming, LI Liyi, WANG Mingyi, et al. The precise modeling and active disturbance rejection control of voice coil motor in high precision motion control system[J]. Applied Mathematical Modelling, 2015, 39(19): 5936-5948.
[8] ZHANG Deyuang, L Jianlu, JIANG Y, et al. A piezoelectric microvalve with a flexure-hinged driving frame and micro fabricated silicon sealing pair[J]. Mechatronics, 2014, 24(5): 511-518.
Jianlu, JIANG Y, et al. A piezoelectric microvalve with a flexure-hinged driving frame and micro fabricated silicon sealing pair[J]. Mechatronics, 2014, 24(5): 511-518.
[9] FUKADA S, FANG B, SHIGENO A. Experimental analysis and simulation of nonlinear microscopic behavior of ball screw mechanism for ultra-precision positioning[J]. Precision Engineering, 2011, 35(4): 650-668.
[10]  Z. Modeling roller guides of preload[J]. Archives of Civil and Mechanical Engineering, 2014, 14(4): 691-699.
Z. Modeling roller guides of preload[J]. Archives of Civil and Mechanical Engineering, 2014, 14(4): 691-699.
[11] TIAN Wenjie, GAO Weiguo, ZHANG Dawei, et al. A general approach for error modeling of machine tools[J]. International Journal of Machine Tools & Manufacture, 2014, 79(4): 17-23.
[12] SRIVASTAVA A K, VELDHUIS S C, ELBESTAWIT M A. Modeling geometric and thermal errors in a five-axis cnc machine tool[J].International Journal of Machine Tools and Manufacture, 1995, 35(9):1321-1337.
[13] FUTAMI S, FURUTANI A, YOSHIDA S. Nanometer positioning and its micro-dynamics[J]. Nanotechnology, 1998, 1(1): 31-37.
[14] ZEINA B, SAMIH A J, IMAD K. Modeling and simulation of series DC Motors in electric car[J]. Energy Procedia, 2014, 50: 460-470.
[15] MAEDA G J, SATO K. Practical control method for ultra-precision positioning using a ball screw mechanism[J]. Precise Engineering, 2008, 32(4): 309-318.
[16] ���h, ��С��, ��ʯ��, ��. ����Simulink-M�ļ���ϱ�̷����ķ��������������Ż�[J]. ����������ѧѧ��, 2009, 29(10): 847-849.
WANG Yue, WANG Xiaoxu, WU Shiyu, et al. Aircraft thrust scheme optimization hybrid program based on Simulink-M[J]. Transactions of Beijing Institute of Technology, 2009, 29(10): 847-849.
[17] DE WIT C C, OLSSON H, ASTROM K J, et al. A new model for control of system with fiction[J]. IEEE Transactions on Automatic Control, 1995, 40(3): 419-425.
(�༭ �²ӻ�)
�ո����ڣ�2017-03-10�������ڣ�2017-05-21
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(50975293)�����ϴ�ѧ�о�������̽��������Ŀ(2016zzts290) (Project(50975293) supported by the National Natural Science Foundation of China; Project(2016zzts290) supported by the Postgraduate Exploratory and Innovative Program of Central South University)
ͨ�����ߣ��μ��������ڣ���ʿ����ʦ�����¹�����������켼����װ������е��������뷽���������˶������о���E-mail: duanjian@csu.edu.cn

