基于无功功率模型的异步电机矢量控制系统
转子时间常数辨识
喻寿益,张艳存,高金生,桂卫华
(中南大学 信息科学与工程学院,湖南 长沙,410083)
摘 要:针对异步电机矢量控制系统受电机参数变化影响大的问题,采用模型参考自适应系统(MRAS)在线辨识电机转子时间常数。为了增强辨识方法对定子电阻的鲁棒性,提高辨识精度,根据转子磁链模型构造无功功率模型建立MRAS,采用Popov超稳定性理论设计自适应规律,得到基于无功功率模型的转子时间常数辨识方法,抑制定子电阻变化对辨识精度的影响,将该转子时间常数辨识方法应用于异步电机矢量控制系统。仿真结果证明:MRAS有效地提高了矢量控制系统性能,转子磁链轨迹趋于圆形,电流谐波分量明显减少;转子磁链观测误差明显降低,其平均绝对误差相对值为2.87%;转矩脉动大大降低,其平均绝对误差相对值为2.09%。
关键词:异步电机;矢量控制;模型参考自适应;转子时间常数
中图分类号:TM301.2 文献标识码:A 文章编号:1672-7207(2009)05-1318-05
Identification of rotor time constant based on reactive power
model in vector control system of induction motor
YU Shou-yi, ZHANG Yan-cun, GAO Jing-sheng, GUI Wei-hua
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: According to the fact that performance of vector control (VC) system is greatly affected by the change of motor parameters, model reference adaptive system (MRAS) was applied to identify rotor time constant on-line. According to rotor flux model, reactive power model was built to establish MRAS, and Popov’s hyperstability theory was applied to design adaptive rule. The method of identifying rotor time constant based on reactive power model was proposed in order to improve robustness against stator resistance and identification accuracy, which reduces the influence of change of stator resistance. The method was applied in VC system of induction motor, and simulation results prove that it improves the performance of VC system effectively. The rotor flux depression and current harmonious decomposition are reduced remarkably, the observation error of rotor flux is reduced sharply to 2.87% and the error of torque is rippled greatly to 2.09%.
Key words: induction motor; vector control; model reference adaptive; rotor time constant
目前,矢量控制方法是交流调速领域较成熟的控制方法,它基于转子磁场定向,通过旋转坐标系变换,实现定子电流的解耦控制。矢量控制建立在准确观测转子磁链的基础上,控制系统性能受电机参数变化影响较大[1]。异步电机参数会随工况的变化而变化[2-4],特别是转子电阻和电感随温度变化,导致转子磁链观测存在较大误差,影响定子电流完全解耦,降低矢量控制的性能。针对异步电机矢量控制系统对电机参数鲁棒性差的问题,国内外学者提出了最小二乘法[5-6]、模型参考自适应系统(MRAS)[7-9]、Kalman滤波器[10-11] 等多种方法来实时辨识转子电阻或时间常数,从而准确观测转子磁链,提高矢量控制系统的性能。然而,最小二乘法同时辨识定子和转子参数,算法复杂,不便于实际应用;Kalman滤波器辨识电机参数,当扰动不是白噪声时,观测误差大。在此,本文作者采用基于无功功率模型的MRAS辨识转子时间常数,避免定子电阻变化对辨识精度的影响,将其应用于异步电机矢量控制系统,以便提高控制系统的性能。
1 异步电机数学模型
异步电机在两相静止的 坐标系下其电压和磁链方程[12]分别为:
坐标系下其电压和磁链方程[12]分别为:

式(3)和(4)分别称为转子磁链的u-i模型和i-n模型。可以看出,2种转子磁链观测模型均受电机参数变化影响。u-i模型主要受定子电阻Rs的影响,尤其在低速时定子电阻压降变化的影响更加显著;i-n模型不论转速高低都能适用,但受转子电阻Rr、转子电感Lr和互感Lm变化的影响,这些参数变化将导致转子磁链幅值与相位观测值失真,影响定子电流解耦,致使异步电机稳态运行时工作在欠励磁或过励磁的情况下,转矩的动态响应变慢,甚至引起转矩强烈振荡,使系统控制性能恶化。因此,辨识转子时间常数对矢量控制来说是非常重要的。
2 基于无功功率模型的转子时间常数辨识
基于转子磁链模型的MRAS转子时间常数辨识方法,选取与转子时间常数无关的u-i模型为参考模型,选取含有转子时间常数项的i-n模型为可调系统,建立MRAS。
然而,转子磁链u-i模型式(3)含有纯积分式,在低速区域(包括零速),定子反电动势us-Rsis表现为近似直流特性。由于积分运算的初始值选取、测量误差和电机参数变化会产生积分漂移和累积误差,降低转子时间常数辨识精度。为解决上述问题,重新构造参考模型,得到基于无功功率模型的转子时间常数辨识方法。
由式(3)~(5)可得到无功功率2种不同的表达式:
式(6)不含定子电阻和转子时间常数,因此,采用该模型计算无功功率不受这两者影响;据式(7),在考虑温度、磁饱和对电机电感的影响时,Lr和Lm同时变化且变化基本相等,故无功功率仅受转子时间常数的影响。转子磁链由观测器给出,且由速度变送器检测获得转速,则式(7)可改写为:

式(6)不含有待辨识转子时间常数和定子电阻以及积分项,选作参考模型;式(8)含有待辨识转子时间常数,无功功率 仅受转子时间常数的影响,选作可调系统。构造MRAS,其结构如图1所示,从而得到基于无功功率模型的转子时间常数辨识方法。
仅受转子时间常数的影响,选作可调系统。构造MRAS,其结构如图1所示,从而得到基于无功功率模型的转子时间常数辨识方法。

图1 基于无功功率模型的MRAS结构
Fig.1 Structure of MRAS based on reactive power model
根据Popov超稳定性理论,设计自适应律为比例积分结构形式,自适应算法为

基于无功功率模型的转子参数辨识方法消除了定子电阻变化对参数辨识精度的影响,以及基于转子磁链模型的转子时间常数辨识方法的低速不稳定性。
3 仿真实验结果
基于以上分析,下面采用MATLAB软件平台进行仿真研究。通过仿真实验验证所提出的基于无功功率模型的转子时间常数辨识方法的有效性,并将该转子时间常数辨识方法应用于异步电机矢量控制系统进行仿真实验。选取异步电机参数为:额定功率PN=37 kW,额定转速nN=787 r/min,额定转矩TN=450 N?m,转动惯量J=0.8 kg?m2,极对数np=3,定子电感Ls= 0.028 H,转子电感Lr=0.028 H,定转子互感Lm=0.027 H,定子电阻Rs=0.092 Ω,转子电阻Rr=0.015 Ω。
当设定定子电阻分别为 ,且转子时间常数为
,且转子时间常数为 ,在t=1.5 s时跳变为Tr=Lr/(2Rr),基于无功功率模型的转子时间常数辨识结果如图2所示。
,在t=1.5 s时跳变为Tr=Lr/(2Rr),基于无功功率模型的转子时间常数辨识结果如图2所示。
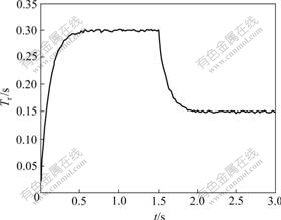
图2 转子时间常数辨识跟踪曲线
Fig.2 Identification trace of rotor time constant
分析图2可以看出,当转子时间常数真实值为 0.3 s,基于无功功率模型的转子时间常数辨识值经0.51 s后可以跟踪真实值;当转子时间常数真实值在1.5 s时突变为0.15 s,基于无功功率模型的转子时间常数辨识值经0.45 s后可以跟踪真实值。这种辨识方法具有理想的收敛速度,能及时跟踪转子时间常数的真实值。
设定转子时间常数为且 时,基于转子磁链模型的转子时间参数辨识和基于无功功率模型的转子时间常数辨识结果如图3所示。
时,基于转子磁链模型的转子时间参数辨识和基于无功功率模型的转子时间常数辨识结果如图3所示。
由图3可以得出,当时,基于转子磁链模型的转子时间常数辨识值相对误差达6.83%,而基于无功功率模型的转子时间常数辨识值相对误差仅为0.91%。故基于转子磁链模型的辨识方法受定子电阻变化影响明显,而基于无功功率模型的转子时间常数辨识方法基本不受定子电阻变化的影响。
将基于无功功率模型的转子时间常数辨识法应用于异步电机矢量控制系统。高速重载时转子时间常数变化较大,其对矢量控制系统性能的影响更加显著。设 =1 Wb,n=700 r/min,TL=200 N?m,不带转子时间常数辨识的矢量控制系统和带转子时间常数辨识的矢量控制系统仿真结果分别如图4和图5所示。
=1 Wb,n=700 r/min,TL=200 N?m,不带转子时间常数辨识的矢量控制系统和带转子时间常数辨识的矢量控制系统仿真结果分别如图4和图5所示。
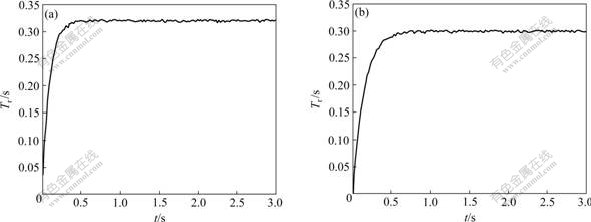
(a) 基于转子磁链模型的转子时间常数辨识结果;(b) 基于无功功率模型的转子时间常数辨识结果
图3  时的转子时间常数辨识曲线
时的转子时间常数辨识曲线
Fig.3 Identification graph of rotor time constant when

(a) 不带转子时间常数辨识系统的仿真结果;(b) 带转子时间常数辨识系统的仿真结果
图4 矢量控制系统转子磁链相对误差
Fig.4 Relative error of rotor flux in VC system

(a) 不带转子时间常数辨识系统的仿真结果;(b) 带转子时间常数辨识系统的仿真结果
图5 矢量控制系统转矩相对误差
Fig.5 Relative error of torque in VC system
由图4可看出,异步电机在高速重载稳态运行时不带转子时间常数辨识的矢量控制系统磁链波动较大,最大绝对误差相对值达到9.25%,平均绝对误差相对值为5.42%;而带转子时间常数辨识的矢量控制系统磁链波动较小,最大绝对误差相对值达到6.18%,绝对误差平均相对值为2.87%。因此,增加转子时间常数辨识环节能有效降低矢量控制系统的转子磁链误差,使转子磁链更趋近于给定值。
由图5可以看出,异步电机在高速重载稳定运行时(仅对比1.0~1.6 s的仿真结果),不带转子时间常数辨识的矢量控制系统转矩脉动较大,最大绝对误差相对值为7.36%,平均绝对误差相对值为4.16%;而带转子时间常数辨识的矢量控制系统转矩脉动较小,最大绝对误差相对值为5.62%,平均绝对误差相对值为2.09%。因此,增加转子时间常数辨识环节能有效地降低矢量控制系统的转矩脉动。
4 结 论
a. 基于无功功率模型的转子时间常数辨识方法具有较大的辨识收敛速度,辨识值能够及时、准确地跟踪真实值。
b. 基于无功功率模型的转子时间常数辨识方法在保证辨识收敛速度的同时,有效地抑制了定子电阻变化对转子磁链观测精度的影响。
c. 将基于无功功率模型的转子时间常数辨识方法应用于矢量控制系统,能有效降低转子磁链观测误差,抑制转矩脉动,提高控制系统性能。
参考文献:
[1] Dittrich A. Parameter sensitivity of procedures for on-line adaptation of the rotor time constant of induction machines with field oriented control[J]. IEEE Proceedings: Electric Power Applications, 1994, 141(6): 353-359.
[2] 奚国华, 张艳存, 胡为华, 等. 基于模糊DSVM控制策略的异步电机直接转矩控制[J]. 中南大学学报: 自然科学版, 2008, 39(1): 166-171.
XI Guo-hua, ZHANG Yan-cun, HU Wei-hua, et al. Direct torque control of induction motors based on fuzzy DSVM strategy[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 166-171.
[3] 冬 雷, 李永东, 王文森, 等. 矢量控制中感应电动机转子电阻的自适应辨识[J]. 电工技术学报, 2002, 17(4): 13-17.
DONG Lei, LI Yong-dong, WANG Wen-sen, et al. Rotor resistance adaptive identification for vector control of induction motors[J]. Transactions of China Electrotechnical Society, 2002, 17(4): 13-17.
[4] 徐小增, 李叶松, 秦 忆. 矢量控制感应电机参数变化的影响研究[J]. 华中科技大学学报: 自然科学版, 2003, 31(7): 43-45.
XU Xiao-zeng, LI Ye-song, QIN Yi. Effect of parameters variety on vector-controlled induction motor[J]. Journal of Huazhong University of Science and Technology: Nature Science Edition, 2003, 31(7): 43-45.
[5] 李建军, 盛洁波, 王 翠, 等. 异步电机定转子参数的辨识方法研究[J]. 电工技术学报, 2006, 21(1): 70-74.
LI Jian-jun, SHENG Jie-bo, WANG Cui, et al. Research on parameter identification method for induction motor[J]. Transactions of China Electrotechnical Society, 2006, 21(1): 70-74.
[6] 崔纳新, 张承慧, 李 珂, 等. 基于参数在线估计的交流异步电动机效率最优控制[J]. 电工技术学报, 2007, 22(9): 80-85.
CUI Na-xin, ZHANG Cheng-hui, LI Ke, et al. Efficiency optimization control of induction motor drives based on online parameter estimation[J]. Transactions of China Electrotechnical Society, 2007, 22(9): 80-85.
[7] Rehman H U, Derdiyok A, Guven M K, et al. An MRAS scheme for on-line rotor resistance daptation of an induction machine[C]//Vancouver, BC: Power Electronics Specialists conference (PESC), 2001 IEEE 32nd Annual, 2001.
[8] 凌 强, 徐文立, 陈 峰. 关于感应电机转速观测和转子电阻辨识的研究[J]. 中国电机工程学报, 2001, 21(9): 58-62.
LING Qiang, XU Wen-li, CHEN Feng. Study on the speed observer and the rotor resistance identifier for an induction motor[J]. Proceedings of the CSEE, 2001, 21(9): 58-62.
[9] 陆海峰, 瞿文龙, 张 磊, 等. 一种基于无功功率的异步电机矢量控制转子磁场准确定向方法[J]. 中国电机工程学报, 2005, 25(16): 116-120.
LU Hai-feng, QU Wen-long, ZHANG Lei, et al. A novel rotor flux oriented scheme of induction motor based on reactive power[J]. Proceedings of the CSEE, 2005, 25(16): 116-120.
[10] Soto G G, Mendes E, Razek A. Reduced-order observers for rotor flux, rotor resistance and speed estimation for vector controlled induction motor drives using the extended Kalman filter technique[J]. IEEE Proceedings: Electric Power Applications, 1999, 146(3): 282-288.
[11] Yu X, Dunnigan M W, Williams B W. A novel rotor resistance identification method for an indirect rotor flux-orientated controlled induction machine system[J]. IEEE Transactions on Power Electronics, 2002, 17(3): 353-364.
[12] 陈伯时. 电力拖动自动控制系统[M]. 3版. 北京: 机械工业出版社, 2003: 190-217.
CHEN Bo-shi. Automatic control system of electric drive[M]. 3rd ed. Beijing: Machinery Industry Press, 2003: 190-217.
收稿日期:2008-10-05;修回日期:2008-12-20
基金项目:国家自然科学基金资助项目(60574030)
通信作者:喻寿益(1940-),男,江西南昌人,教授,博士生导师,从事自适应控制、人工智能等研究;电话:13973184545;E-mail: s_yushouyi@sina.com

