DOI: 10.11817/j.issn.1672-7207.2017.08.011
滚动轴承支撑下齿轮耦合转子横向振动建模及非线性动力学特性
李同杰1, 2,靳广虎1,鲍和云1,朱如鹏1,安鲁陵1
(1. 南京航空航天大学 机电工程学院,江苏 南京,210016;
2. 安徽科技学院 机械工程学院,安徽 凤阳,233100)
摘要:在综合考虑滚动轴承游隙、齿轮副齿侧间隙以及时变啮合刚度等非线性因素的基础上,建立滚动轴承支撑下的齿轮耦合转子系统的横向振动非线性动力学模型,并通过数值仿真的方法对系统运动状态的分岔规律以及动力学频响特性进行研究。研究结果发现:在非线性轴承力的激励下,转速、轴承游隙以及轴承阻尼的变化,都会导致系统通过不同的分岔途径进入到混沌运动状态;质量偏心以及齿侧间隙的增大都会使系统响应由简单的轴承力激振频率及其倍数频逐渐复杂化为离心力激振频率、轴承力激振频率、以及二者的各种线性组合频率共存的情况,齿轮啮频成分也出现在系统响应中,但始终处于弱势地位。
关键词:齿轮耦合转子;滚轴轴承;非线性振动模型;分岔;频响特性
中图分类号:O322;TH113 文献标志码:A 文章编号:1672-7207(2017)08-2044-09
Transverse vibration model and nonlinear dynamics of gear rotor-rolling bearing system
LI Tongjie1, 2, JIN Gunaghu1, BAO Heyun1, ZHU Rupeng1, AN Luling
(1. College of Mechanical and Electrical Engineering,
Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;
2. College of Mechanical Engineering, Anhui Science & Technology University, Fengyang 233100, China)
Abstract: A nonlinear transverse vibration model of a gear rotor-rolling bearing system was built taking the nonlinear factors, such as bearing clearance, gear backlash and time-varying meshing stiffness into account. By using the method of numerical simulation, the bifurcation laws and the frequency response characteristics of the system were studied primarily. The results reveal that the changes of rotor speed, rolling bearing clearance and bearing damping may lead to chaos through different ways; the increase of rotor eccentricity and the gear backlash will make the system response from simple bearing force excitation frequency and its multiple frequency gradually changes into a complicated one that includes various linear combinations of centrifugal force frequency and the bearing frequency. The gear meshing frequency is one of the system respond factors, but always plays a small role no matter whether the rotor eccentricity or the gear backlash is big or not.
Key words: gear rotor system; rolling bearing; nonlinear dynamic model; bifurcation; frequency response
转子-滚动轴承-齿轮系统广泛应用于各种机器的变速箱、主减速器等场合,是机械传动系中最为常见的一种组合。由于轴承游隙、齿轮副齿侧间隙以及时变啮合刚度等固有非线性因素的存在,转子-滚动轴承-齿轮系统本质上是一个非光滑强非线性动力系统,在某些设计参数组合或运转工况下可能会呈现异常振动,严重影响着传动系统的工作可靠性甚至整个机器的运行品质。所以,对滚动轴承支撑下齿轮耦合转子系统开展非线性动力学特性研究就具有重要的工程实际意义。实际上,国内外众多专家学者早已注意到了转子-滚动轴承耦合系统的非线性动力学行为,并开展了一系列卓有成效的研究工作。TIWQRI等[1]在其研究中较早提出了滚动轴承非线性支撑力的解析表达式。袁茹等[2]建立了滚动轴承支承的水平刚性转子系统的非线性动力学模型, 用数值积分方法研究了系统响应随转子转速的变化趋势。CHAVEZ等[3]在滚动轴承-转子模型中,将转子简化为刚体,将滚动轴承视为弹簧和阻尼器的组合,通过数值方法研究了转子系统的动力学特性。CONG等[4]基于一个两自由度的滚动轴承-转子系统,研究了滚动轴承的袁故障响应特征。GAO等[5]研究了主轴转子-轴承系统运动状态的分岔特性。GAO等[6]研究了滚动轴承齿轮转子与滑动轴承齿轮转子共存机械系统的分岔与混沌的道路。曹宏瑞等[7]建立了高速滚动轴承的力学模型,计算了轴承的时变刚度,并通过试验验证了模型仿真系统动态响应的精度。此外,针对齿轮系统的非线性动力学研究文献也十分丰富[8-24]。本文作者将在充分考虑滚动轴承游隙、齿轮副齿侧间隙以及时变啮合刚度等非线性因素情况下,尝试建立滚动轴承支撑下的齿轮耦合转子系统的横向振动非线性动力学模型,并通过数值手段对系统的非线性动力学特性展开初步研究。
1 力学模型及振动微分方程
根据抓主略次以及由浅入深的建模原则,本文忽略转子的扭转振动位移,建立的滚动轴承-齿轮-转子系统的横向振动非线性动力学模型如图1~4所示。
图1所示为系统整体动力学模型图。主动齿轮z1安装在刚性轴上(z1表示主动轮齿数),转轴两端刚支;从动齿轮z2亦安装在刚性轴上(z2表示从动轮齿数),轴两端装配在滚动轴承上,两轴承相对于从动轮对称分布。假设两轴颈运动规律也完全对称,从而可将从动转子视为Jeffcott转子。滚动轴承作用在转子上的弹性力沿固定坐标x和y方向的分量分别为为Fkx和Fky,阻尼力沿固定坐标x和y方向的分量分别为为Fcx和Fcy,转子的总质量为M。
图2所示为转子-滚动轴承结构示意图。假设轴承滚动体个数为N,转子角速度为ω;轴承外圈半径为R,固定于基础之上;轴承内圈半径为r,与转轴过盈联结,即轴承内圈与转子同转速;由运动学定理易知滚动体公转角速度为ω0=rω/(r+R),那么轴承第i个滚动体在t时刻所处位置可用角位移θi表示,即
 (1)
(1)
式中:φ1为第1个滚动体的初相位。按照文献[1]和[2]结论,滚动轴承作用在转子上的非线性弹性力Fkx和Fky可以表述如下:
 (2)
(2)
式中:kb为滚动轴承的载荷变形系数;x和y分别为转子沿2个固定坐标方向的横向位移;r0为轴承游隙;H为亥维塞函数,视滚珠与滚道的法向接触变形量 之正负而取1或0,表征了轴承游隙所引起的分段非线性。考虑到滚动体每通过载荷作用线1次,就会产生1次周期性的振动,滚动轴承的非线性弹性力周期角频率ω1还与滚动体个数N有关,即 ω1=Nω0。
之正负而取1或0,表征了轴承游隙所引起的分段非线性。考虑到滚动体每通过载荷作用线1次,就会产生1次周期性的振动,滚动轴承的非线性弹性力周期角频率ω1还与滚动体个数N有关,即 ω1=Nω0。

图1 系统整体动力学模型图
Fig. 1 Nonlinear vibration model of system
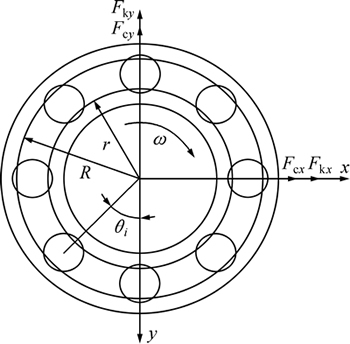
图2 转子-滚动轴承结构示意图
Fig. 2 Structure diagram about rotor-rolling bearing
滚动轴承作用在转子上的阻尼力Fcx和Fcy采用工程中常用的速度线性函数表达,即
 (3)
(3)
图3所示为齿轮啮合力示意图。由于主动轮被假设为刚性支撑下的刚性转子,故而没有横向振动位移;k(t)表示齿轮副的时变啮合刚度,根据参与啮合的轮齿对数的周期性变化而呈现矩形波变化;b为齿轮副半齿侧间隙,rb1和rb2分别为主、从动轮的基圆半径;α为啮合角,标准安装下即为齿轮压力角;由于齿侧间隙的存在,使得齿轮副啮合状态存在3种可能,即正常啮合、空啮合以及齿背啮合,由此引发齿轮啮合力F的数学表达为齿轮副啮合点相对位移s的分段函数[8]:
 (4)
(4)
由于不考虑转子的扭转振动以及主动轮的横向振动,齿轮副啮合点的相对位移s全部由转子横向位移在啮合线上的贡献量产生,即
 (5)
(5)

图3 齿轮啮合力示意图
Fig. 3 Schematic diagram of gear meshing force
呈周期性矩形波变化的时变啮合刚度k(t)可以傅里叶展开,表示为以啮合角频率ω2=z2ω为基频的简谐函数的叠加,即
 (6)
(6)
式中:km为齿轮副平均啮合刚度;kaj为第j阶傅里叶展开谐波项的幅值; 为齿轮副啮合刚度的第j次谐波项的初相位。以上3个参数的取值决定于齿轮的齿宽、变位系数、齿数以及重合度等参数,具体关系可以参考文献[25]。
为齿轮副啮合刚度的第j次谐波项的初相位。以上3个参数的取值决定于齿轮的齿宽、变位系数、齿数以及重合度等参数,具体关系可以参考文献[25]。
将从动轮转子所有受力投影到轴向,可得如图4所示的转子受力分析图。其中:P为转子自身重力;Fe为转子质量偏心距e和回转角速度ω所导致的离心力,其值为Fe=Meω2;假设初始时刻转子重心与几何中心的连线与x轴平行,那么,在t时刻转子重心与几何中心的连线与x轴之夹角为ωt;FIx和FIy分别为虚加在转子之上且与x和y方向加速度反向的惯性力,其值分别为 和
和 。根据达朗贝儿原理,容易列出系统的振动微分方程为
。根据达朗贝儿原理,容易列出系统的振动微分方程为
 (7)
(7)
以轴承游隙r0为量纲一的标称尺度,引入量纲一的位移X和Y,满足 ,
, ;令
;令 ,那么速度dX/dτ和dY/dτ满足
,那么速度dX/dτ和dY/dτ满足 ,
, ,加速度
,加速度 和
和 满足
满足 ,
, 。把以上关系代入方程(7),并在方程两边同除
。把以上关系代入方程(7),并在方程两边同除 ,可以得到系统量纲一化后的微分方程:
,可以得到系统量纲一化后的微分方程:
 (8)
(8)
方程(8)中,齿轮啮合力是间隙分段函数,在每一段内主要按啮频ω2周期性变化;惯性力按转子角速度ω周期性变化;滚动轴承弹性支撑力是间隙分段函数,在每一段内按轴承非线性弹性力的角频率ω1周期性变化。所以,转子-滚动轴承-齿轮系统是一个多频激励下的非光滑非线性动力系统。

图4 转子受力分析图
Fig. 4 Global mechanic analysis of rotor
仿真案例中假定齿轮耦合转子由某型号深沟球轴承支撑,其参数为滚动体个数N=9,轴承内圈半径为r=14.55 mm,轴承外圈半径为R=19.98 mm,滚动轴承的载荷变形系数kb=7.055 GN/m1.5,轴承游隙取为r0=10 μm,轴承阻尼c=300 N・s/m;按照装配原理,齿轮设计参数取为模数m=1 mm,主动轮齿数z1=29,从动轮齿数z2=29,压力角α=20°,半齿侧间隙b=1 μm,转子总质量M=2 kg。
2 非线性轴承力激励下转子运动状态的分岔规律
为了研究滚动轴承的非线性支撑力对转子运动状态分岔规律的影响,令动力系统(8)中的偏心距e=0 μm,并以齿轮副的平均啮合刚度代替系统的时变啮合刚度,那么,系统就变为一个以ω1为角频率的单频激励系统,所表现出来的分岔规律可以全部归因于非线性轴承力的激励。
2.1 运动状态随转速的分岔规律
在保持其他参数不变的情况下,令转速在2 000~ 15 000 r/min之间变化,以轴承力周期T1=2π/ω1为周期截取不同转速下的Poincare截面图,最终得到的转速全局分岔如图5所示。
系统在不同转速下的Poincare截面图如图6所示。从图6可以看到:系统在4 300~4 600 r/min,6 240~7 200 r/min和13 900~15 000 r/min3个转速区间呈献复杂运动状态(可能是长周期运动、拟周期运动或混沌状态之一),其他转速区间系统呈献稳定的周期一运动,周期即为非线性轴承力的激振周期T1。
为了确定系统从周期一运动进入到转速区间4 300~4 600 r/min内的复杂运动形态及其分岔途径,以下截取了该复杂运动区间附近的几个转速的Poincare截面图,如图6(a)~6(e)所示。从图6可以看到:当转速的增加,系统运动状态由稳定的周期1(图6(a))经内依马克-沙克分岔进入拟周期运动(图6(d)),随后拟周期环面破裂进入混沌运动(图6(e))。
图6(f)所示为转速区间6 240~7 200 r/min内复杂运动的Poincare截面图。图6(f)显示系统在该转速区间呈现混沌运动。结合图5显示:随着转速的增加,系统是由稳定的周期1运动突然就变成了该转速区间的混沌,可以明确系统的第2段复杂运动是通过“激变”途径由周期1运动分岔为混沌运动的。

图5 转速全局分岔图
Fig. 5 Bifurcation diagram about revolving speed
图6(g)~6(j)所示为系统第3段复杂运动区间附近的几个不同转速下的Poincare截面图。显然,随着转速的增加,系统由周期1运动分岔为周期2运动(图6(g)),接着周期2又裂变为周期4运动(图6(h)),进而周期4运动又分岔为周期8运动(图6(i)),最终系统进入混沌运动(图6(j)),以上过程呈现出了典型的倍周期分岔进入混沌的途径。
2.2 运动状态随轴承游隙的分岔规律
保持转速n=3 000 r/min,令轴承游隙r0在0.1~10 μm之间变化,仍以轴承力周期T1=2π/ω1截取不同游隙下的Poincare图,最终得到的轴承游隙全局分岔图,图7所示为系统随轴承间隙的分岔规律。从小间隙出发,随着间隙的增加,系统的运动状态由稳定的周期一经倍周期分岔途径进入到中等间隙处的混沌运动,再由中等间隙的混沌运动经倍周期倒分岔回归到周期1运动。Poincare截面图8的形态证明了中等间隙处混沌运动的发生。
2.3 运动状态随轴承阻尼系数的分岔规律
保持转速n=3 000 r/min,轴承游隙取为r0=10 μm,令轴承阻尼系数c在150~300 N・s/m之间变化,仍以轴承力周期T1=2π/ω1截取不同阻尼下的Poincare图,最终得到轴承阻尼全局分岔图。图9所示为系统随轴承阻尼的分岔规律。小阻尼状态下系统运动以混沌状态为主,其间由倍周期倒分岔短暂出现过周期窗口,很快又进入混沌;而在阻尼增加到240 N・s/m以后的大阻尼区间,系统呈现稳定的周期1运动,说明阻尼对振动的抑制非常明显。图10所示为小阻尼状态下(c=189 N・s/m)的Poincare截面图,其形态证明了混沌运动的发生。
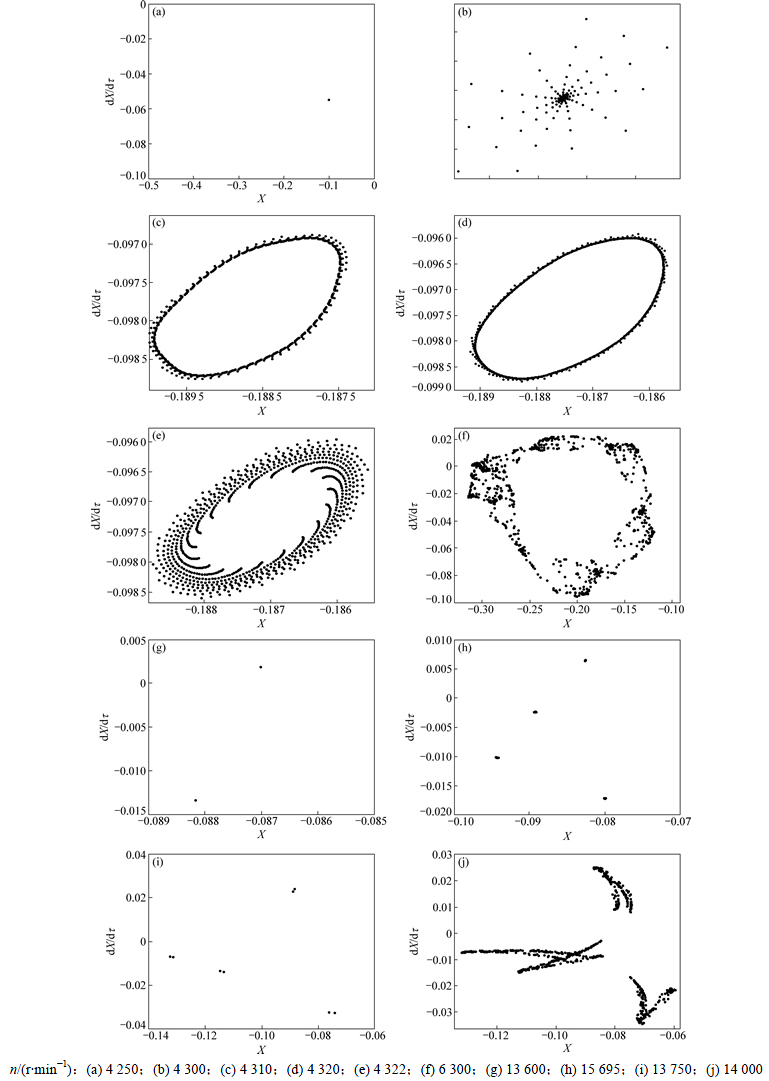
图6 不同转速下系统振动状态的Poincare截面图
Fig. 6 Poincare map of system at different speeds

图7 轴承游隙分岔图
Fig. 7 Bifurcation diagram about bearing clearance

图8 Poincare截面图(r0=5.5 μm)
Fig. 8 Poincare map of system (r0=5.5 μm)

图9 轴承阻尼分岔图
Fig. 9 Bifurcation diagram about bearing damp
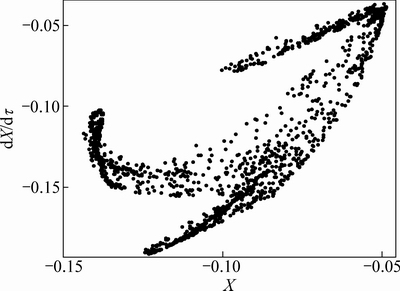
图10 Poincare截面图(c=189 N・s/m)
Fig. 10 Poincare map of system (c=189 N・s/m)
3 多频激励下系统的非线性动力学频响特性
3.1 转子质量偏心对频响特性的影响
令齿侧间隙b=1 μm,转速n=2 000 r/min,同时考虑转子离心力、非线性轴承力以及齿轮啮合力的影响,在此工况下系统存在3个激励频率,即离心力激励频率fe=33.3 Hz,非线性轴承力激励频率f1=112.3 Hz,齿轮啮合力激励频率f2=765.9 Hz。图11所示为不同质量偏心距下系统响应的频谱。
从图11(a)可以看到:在较小的质量偏心下,系统响应主要表现为轴承力激振频率f1及其倍数频;存在齿轮啮合力激振频率f2的响应成分,但幅值很小;没有发现离心力激振频率fe的响应成分。
随着质量偏心的增大(图11(b)),系统响应中开始出现离心力激振频率fe及其倍数频、分数频;齿轮啮合力激振频率f2的响应成分依然很弱;轴承力激振频率f1及其倍数频的响应仍然占据主导地位;系统响应中开始出现轴承力激振频率f1与离心力激振频率fe线性叠加成分,运动变得复杂。
当偏心距达到50 μm时(图11(c)),离心力激振响应与轴承力激振响应幅值相当,两频率的各种线性叠加成分进一步强化,响应更加复杂;当偏心距达到100 μm时(图11(d)),离心力频响已占主导,轴承力频响及其倍数频、分数频响应弱化,整个系统响应反而变简单。齿轮啮频响应在整个过程中始终处于弱势地位。
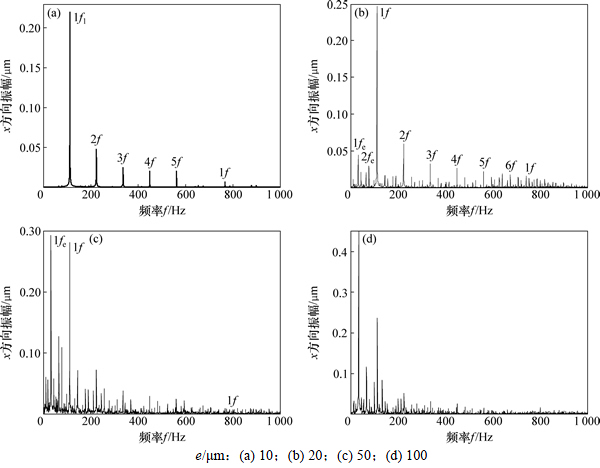
图11 不同质量偏心下系统的振动响应频谱
Fig. 11 Spectrogram of response with different mass eccentricity
3.2 齿侧间隙对频响特性的影响
令转子偏心矩e=10 μm,转速n=3 000 r/min,同时考虑转子离心力、非线性轴承力以及齿轮啮合力的影响,在此工况下系统离心力激励频率fe=50 Hz,非线性轴承力激励频率f1=168 Hz,齿轮啮合力激励频率f2=1150 Hz。图12所示为不同齿侧间隙下的系统响应频谱。
从图12可以看到:在齿轮小间隙条件下(图12(a)),系统响应主要表现为轴承力激振频率f1及其倍数频,齿轮啮合频率成分响应较弱;随着齿侧间隙的增大(图12(b)),系统响应中开始出现离心力激振频率fe,齿轮啮合频率响应成分得到加强;当进一步增大齿侧间隙(图12(c)),离心力激振频率fe及其倍数频响应成分增强,而齿轮啮合频率成分响应变弱,系统响应中开始出现轴承力激振频率f1与离心力激振频率fe的各种线性叠加成分,运动变得复杂。再继续增大齿侧间隙值(图12(d)),系统的频域响应几乎没有什么变化。
4 结论
1) 在综合考虑了滚动轴承游隙、齿轮副齿侧间隙以及时变啮合刚度等非线性因素的基础上,建立了滚动轴承支撑下的齿轮耦合转子系统的横向振动非线性动力学模型,并通过数值仿真的手段对系统的分岔规律以及频响特性进行了研究。
2) 在非线性轴承力的激励下,系统的周期运动状态会在低转速下通过内依马克-沙克分岔进入拟周期,进而拟周期环面破裂进入混沌,在中等转速下,系统会通过激变途径进入混沌,高转速下系统运动会通过倍周期分岔途径进入混沌;随着轴承游隙的增大,系统的运动状态会由小游隙下的周期1运动经倍周期分岔途径进入中等间隙下的混沌运动,再由中等游隙的混沌运动经倍周期倒分岔回归到大游隙下的周期1运动;随着轴承阻尼系数的增大,系统运动状态会由混沌运动通过倍周期倒分岔的途径稳定到周期1运动。
3) 随着转子质量偏心的增大,系统响应会由简单的轴承力激振频率及其倍数频逐渐复杂化为离心力激振频率、轴承力激振频率以及二者的各种线性组合频率共存的情况,并且离心力激振频率成分逐渐占据上风,齿轮啮频成分也出现在系统的响应中,但始终处于弱势地位。
4) 随着齿侧间隙值的增大,系统响应会由简单的轴承力激振频率及其倍数频逐渐复杂化为离心力激振频率、轴承力激振频率以及二者的各种线性组合频率共存的情况,但是无论间隙如何增大,轴承力激振频率成分始终在响应中占据主导;存在1个齿侧间隙中间阀值使得系统响应中的齿轮啮频成分出现极值,从此阀值出发,增大或减小间隙值,响应中的齿轮啮频成分都将减小。
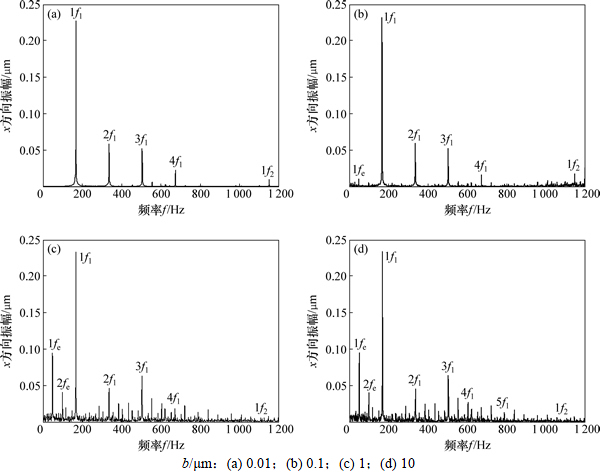
图12 不同齿侧间隙下系统的振动响应频谱图
Fig. 12 Spectrogram of response with different tooth backlash
参考文献:
[1] TIWQRI M, GUPTA K. Effect of radial internal clearance of a ball bearing on the dynamics of a balanced horizontal rotor[J]. Journal of Sound and Vibration, 2000, 238(5): 723-756.
[2] 袁茹, 赵凌燕, 王三民. 滚动轴承-转子系统的非线性动力学特性分析[J]. 机械科学与技术, 2004, 23(10): 1175-1177.
YUAN Ru, ZHAO Lingyan, WANG Sanmin. Analysis of the nonlinear dynamic behaviors of a rolling bearing-rotor system[J]. Mechanical Science and Technology, 2004, 23(10): 1175-1177.
[3] CHAVEZ J P,WIERCIGROCH M. Bifurcation analysisof periodic orbits of a non-smooth Jeffcott rotor model[J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(9): 2571-2580.
[4] CONG Feiyun, CHEN Jin, DONG Guangming, et al. Vibration model of rolling element bearings in a rotor-bearing system for fault diagnosis[J]. Journal of Sound and Vibration, 2013, 332(8): 2081-2097.
[5] GAO Shanghan, MENG Guang, LONG Xinhua. Stability prediction in high-speed milling including the thermal preload effects of bearing[J]. Proceedings of the Institution of Mechanical Engineers, Part E: Journal of Process Mechanical Engineering, 2010, 224(1): 11-22.
[6] GAO Haodong, ZHANG Yidu. Nonlinear behavior analysis of geared rotor bearing system featuring confluence transmission[J]. Nonlinear Dynamics, 2014, 76(4): 2025-2039.
[7] 曹宏瑞, 李亚敏, 何正嘉, 等. 高速滚动轴承-转子系统时变轴承刚度及振动响应分析[J]. 机械工程学报, 2014, 50(15): 73-81.
CAO Hongrui, LI Yamin, HE Zhengjia. Time varying bearing stiffness and vibration response analysis of high speed rolling bearing-rotor systems[J]. Journal of Mechanical Engineering, 2014, 50(15): 73-81.
[8] 唐进元, 陈思雨, 钟掘. 一种改进的齿轮非线性动力学模型[J]. 工程力学, 2008, 25(1): 217-223.
TANG Jinyuan, CHEN Siyu, ZHONG Jue. An improved nonlinear model for a spur gear pair system[J]. Engineering Mechanics, 2008, 25(1): 217-223.
[9] MORADI H, SALARIEH H. Analysis of nonlinear oscillations inspur gear pairs with approximated modelling of backlash nonlinearity[J]. Mechanism and Machine Theory, 2012, 51(5): 14-31.
[10] 李同杰, 朱如鹏, 鲍和云, 等. 行星齿轮系扭转非线性振动建模与运动分岔特性研究[J]. 机械工程学报, 2011, 47(21): 76-83.
LI Tongjie, ZHU Rupeng, BAO Heyun. Nonlinear torsional vibration modeling and bifurcation characteristic study of a planetary gear train[J]. Journal of Mechanical Engineering, 2011, 47(21): 76-83.
[11] TAMMINANA V K, KAHRAMAN A, VIJAYAKAR S. A study of the relationship between the dynamic factors and the dynamic transmission error of spur gear pairs[J]. Journal of Mechanical Design, 2007, 129(1): 75-84.
[12] CAI W, CHANG J. Nonlinear analysis for gear pair systemsupported by long journal bearings under nonlinear suspension[J]. Mechanism and Machine Theory, 2010, 45(4): 569-583.
[13] CHEON G J. Numerical study on reducing the vibration of spur gear pairs with phasing[J]. Journal of Sound and Vibration, 2010, 329(19): 3915-3927.
[14] 徐东, 徐永成, 陈循. 单表面故障的滚动轴承系统非线性动力学研究[J]. 机械工程学报, 2010, 46(21): 61-68.
XU Dong, XU Yongcheng, CHEN Xun. Research on nonlinear dynamics of a single surface defect in rolling element bearing systems[J]. Journal of Mechanical Engineering, 2010, 46(21): 61-68.
[15] LI Zhengminqing, LIU Xinsheng, ZHU Rupeng. Comparison of dynamic behaviors and strength among three versions of ace gear drives with high contact ratios[J]. Journal of Vibroengineering, 2015, 17(1): 125-136
[16] LI Zhengminqing, WANG Jing, ZHU R P. Influence comparisons of two version tooth profile modifications on face gear dynamic behaviors[J]. Journal of Vibroengineering, 2016, 18(6): 3499-3511
[17] SUN T, HU H Y. Nonlinear dynamics of a planetary gear system with multiple clearances[J]. Mechanism and Machine Theory, 2003, 38(12): 1371-1390.
[18] TANG Jinyuan, HU Zehua, CHEN Siyu. Effects of directional rotation radius and transmission error on the dynamic characteristics of face gear transmission system[J]. Journal of Mechanical Engineering Science, 2014, 228(7): 1108-1118
[19] HU Zehua, TANG Jinyuan, CHEN Siyu. Effect of mesh stiffness on the dynamic response of face gear transmission system[J]. Journal of Mechanical Design, 2013, 135(7): 071005.
[20] 李同杰, 朱如鹏, 鲍和云等. 行星齿轮传动系的周期运动及其稳定性[J]. 振动工程学报, 2013, 26(6): 815-822
LI Tongjie, ZHU Rupeng, BAO Heyun. Coexisting periodic solutions and their stability of a nonlinear planetary gear train[J]. Journal of Vibration Engineering, 2013, 26(6) :815-822.
[21] LI Xiaozhen, ZHU Rupeng, LI Zhengminqing. Influences of frictional coefficient on vibration characteristic of face-gear transmission system[J]. Journal of Vibroengineering, 2014, 27(4): 583-588.
[22] CHEN Siyu, TANG Jinyuan. Nonlinear dynamic characteristic of afacegeardrive with effect of modification[J]. Meccanica, 2014, 49(5): 1023-1037.
[23] SAXENA A, CHOUKSEY M. Effect of mesh stiffness of healthy and crackedgeartooth on modal and frequency response characteristics of gearedrotorsystem[J]. Mechanism and Machine Theory, 2017, 107(1): 261-273.
[24] YANG Yi, WANG Jiaying. A general method to predict unbalance responses of gearedrotorsystems[J]. Journal of Sound and Vibration, 2016, 381(27): 246-263.
[25] LIN J, PARKER R G. Planetary gear parametric instability caused by mesh stiffness variation[J]. Journal of Sound and Vibration, 2002, 249(1): 129-145.
(编辑 陈爱华)
收稿日期:2016-09-06;修回日期:2016-12-25
基金项目(Foundation item):国家自然科学基金资助项目(51475226,51305196);安徽省教育厅自然科学重点资助项目(KJ2015A179);安徽省科技攻关项目(1501031095,1604a0902134);安徽科技学院自然科学项目(ZRC2016488)(Projects (51475226, 51305196) supported by the National Natural Science Foundation of China; Project (KJ2015A179) supported by the Natural Science Key Project of Anhui Provincial Education Department; Projects (1501031095, 1604a0902134) supported by the Programs for Science and Technology Development of Anhui Province; Project (ZRC2016488) supported by the Natural Science Project of Anhui Anhui Science and Technology University)
通信作者:李同杰,博士,副教授,从事齿轮系转子统非线性动力学特性研究;E-mail:litongjie2000@163.com

