��������ѧϰ�����㷨�ķ����ŷ�ϵͳ���
�κ���1,2,������1,�����3, ���ǿ1
(1.�Ͼ����պ����ѧ �Զ���ѧԺ, ���� �Ͼ�,210016;
2.�������պ����ѧ �Զ�����ѧ���������ѧԺ,����,100083;
3.�й���ѧԺ �ռ��ѧ��Ӧ���о�����,����,100080)
ժҪ: ������˻�(UAV)�����ŷ�ϵͳ������ģ��,�����һ�ֽ������㷨����UAV�����ŷ�ϵͳ����ѧϰ��Ƶ��·������ڸ��㷨�в�����BP������Ļ���˼��,����������롢�����㡢���������ѧϰ����,�����ֱ�Ϊ����ָ���źźͷ������ֽ�����λ���ź�;�����㵥Ԫ��Ϊ12��;�������Ϊ2�������Ԫ,��������ѧϰ�����㷨ѧϰѵ���������λ�ú��ٶ�,����λ�ÿ����������Ե��ڱ���-����-��(PID)����,�ٶ�ͨ������/ģ��(D/A)ת�����͵��ٶȿ�����,�趨�������ָ��Ϊ0.05,ѵ��������Ϊ30�������Ƶ�UAV�����ŷ�ϵͳ��UAV�������ݴ��������к�ʵ�������ʵʱ����ʵ��,�������,������ѧϰ�����㷨���Ʒ�����UAV�����ŷ�ϵͳ���������Ժá���̬��Ӧ�졢³����ǿ���ص㡣
�ؼ���: �����㷨; BP������; �����ŷ�ϵͳ; ����ѧϰ; ���˻�
��ͼ�����:TP273; TP391 ���ױ�ʶ��:A ���±��: 1672-7207(2005)02-0267-05
Design of On-line Learning Based Error Back Propagation Algorithm in Simulation Servo System
DUAN Hai-bin1,2,WANG Dao-bo1,YU Xiu-fen3,ZHU Jia-qiang1
( 1.College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;
2. School of Automation Science and Electrical Engineering,
Beijing University of Aeronautics and Astronautics, Beijing 100083, China;
3. Center for Space Science and Applied Research, Chinese Academy of Sciences, Beijing 100080, China)
Abstract: Based on the driving model of unmanned aerial vehicle(UAV) simulation servo system, a novel scheme based on on-line learning error back propagation algorithm(EBPA) was proposed in designing UAV simulation servo system. The idea of back propagation(BP) neural network was adopted in the proposed algorithm. The on-line learning strategy of EBPA with two inputs, single hidden layer and two outputs was applied in this scheme. The input layer included given signal and feedback digital position; the hidden layer had 12 nerve cells; the output layer had two output nerve cells, which were trained digital position and velocity, and self-tuning proportional-integral-differential (PID) control scheme was adopted in the position controller; the digital/analog (D/A) transformed velocity signal was transmitted to velocity controller. The resolution error was 0.05, and the number of training samples was 30. Finally, Hardware-in-loop real-time simulation experiments for a type of fiber optic gyro were conducted in the newly designed UAV simulation servo system. Simulation results illustrate that the UAV simulation servo system using on-line learning based EBPA has good astringency, quick response and strong robust.
Key words: error back propagation algorithm; back propagation neural network; simulation servo system; on-line learning; unmanned aerial vehicle
-
�����ŷ�ϵͳ��һ�ֿ��ڵ�����а�ʵ�����Ͳ��Ե�Ӳ���豸,����ʵ���һ�����ʵʱ�ظ��ַ������ڿ��з���ʱ�Ķ���ѧ���Ժ��ַ�����̬[1],�����������ʵ��ı����Ժ����Ŷ�������ء�
[BJ(,,,][BJ)] ��2�� �κ���,��: ��������ѧϰ�����㷨�ķ����ŷ�ϵͳ��� BP�����������Ϣ�ķֲ�ʽ�洢�����д���������Ӧѧϰ��������ӳ���Լ�³�����Ƶ��ŵ�[2]���Ҿ���ƫ�������һ����S�������������һ���������������,�ܹ��ƽ�������������[3],�Ӷ�BP�������ڶ����ϵͳ�о������Ե����ơ�
�ڴ�,����ͨ����BP��������о��Ľ�,�����һ�������㷨(error back propagation algorithm,���EBPA),����ƿ�����һ�ֿ�����ѧϰ�Ļ��ڵ���������EBPA�ķ��з����ŷ�ϵͳ������,�÷����ŷ�ϵͳ���������˻�(unmanned aerial vehicle,���UAV)�����溬ʵ�������ʵʱ�������ʵ�顣���ŷ�ϵͳ���ڿ��п�����ֱ�ģ��UAV�ڿ��еĹ�ת����������λ3�����ɶȵ��˶���̬,��ΪUAV���ϵͳ�����ƺĽ��ṩ��Ҫ����������
1 �ŷ�ϵͳ����ģ��
����UAV�����ŷ�ϵͳ������ģ���Ƕ������ϵͳ������Ƶ�ǰ�ᡣ�ڶԱ��ض������۷����Ļ�����,�ɽ���������ģ��[4, 5]��ʽ(1)~(3)�������ŷ�ϵͳ������ģ��,UAV�����ŷ�ϵͳ������ģ�Ϳ���������Դ�ģ����Ϊ���ض���

����:LaΪ���ص���ĵ�����;RaΪ���ص���ĵ������;KmΪ�������ϵ��;JmΪ���ص����ת������;JLΪ���ص�ת������;DmΪճ������ϵ��;DLΪ��ܵ�ճ������ϵ��;K12Ϊ���ص���Ϳ�ܵ���ϸնȡ�
UAV�����ŷ�ϵͳ������ģ�ͽṹ��ͼ1��ʾ��ͼ��:UrΪ�ο�ָ���ѹ;KpΪ���ʷŴ����ķŴ���;KeΪ���ص���ķ�����ϵ��;��mΪ���ص����ת��;��LΪ���ص�ת�ǡ�

ͼ 1 UAV�����ŷ�ϵͳ������ģ�ͷ���ͼ
Fig. 1 Block diagram of driving model for UAV simulation servo system
2 �����㷨ԭ��
��ͳ��BP������ģ��һ��������㡢�м����������3��������[6-8]��BP������ṹ��ͼ2��ʾ��
����Ƶ�EBPA��,������BP�������һЩ����˼�롣����EBPA����������ΪX,������Ԫ��N��,��X=[x1, x2,��,xN];��������K����Ԫ;�������ΪY,�������M����Ԫ[9-13],��Y=[y1, y2,��,yM]��
EBPA��������ļ�������ѡ�����¡�S���ͺ���:

����:z��R;aΪ����ϵ����

ͼ 2 BP������ṹͼ
Fig. 2 Diagram of BP neural networks structure
�������ѵ������p,��������Ϊ:

����:��pi=(dpi-ypi��L),ΪEBPA���������ʸ��Y����ֵ��ʵ��ֵ֮������;dpiΪ��������������ֵ;ypi=o(3)pi,Ϊ��Щ������ʵ��ֵ��
�ı�EBPA�еĸ�����Ȩϵ��w(l)ij,�Ӷ�ʹEp�����ܼ�С��������½�����Ȩֵ,���ɹ�ʽ
 ,
,
��������Ȩϵ���ĵ�������pw(k)ij�ļ��㹫ʽ(��Ա��Ϊp��ѵ������)����:
����:i=0,1,��,Q-1;j=0,1,��,L;l=1,2,3�����Ƶ����õ�ϵ����������pw(l)ij=����(l)pio(l-1)pj��
����,o(l-1)pj��ֱ�Ӵ�EBPA�����еõ�,��(l)pi����ֱ�ӵõ�����
 ,
,
Ϊ��֤Ȩ��ϵ����������,����ѧϰ�ij��ڽ�,��ֵѡ�ô�һЩ,�Ӷ�ʹѧϰ���ٶȼӿ�,���ڽӽ���ѵ�ʱ��ֵ�����С���˴����á����ԡ������㷨:

����:t0,t1,��,tk-1,tk,����ʾѧϰ��ʱ���š�
Ϊ����æ�(l)pi,���ø��Ϻ������ַ�,��:

���õ�3��EBPA������Ȩ��ϵ���������ļ��㹫ʽ���¡�
��l=3ʱ,

����:i=0,1, ��,M-1;j=0,1,��,K��
��l=2ʱ,
����:i=0,1,��,K-1;j=0,1,��,J��
��l=1ʱ,
����:i=0,1,��,J-1;j=0,1,��,N��
����, o(2)pi=��pi,i=0,1,��,M-1;o(0)pj=��pj;j=0,1,��,N��
��һ�㷨�ļ�����������ȼ����3��(�������)�ĸ������������(3)pi,Ȼ���æ�(3)pi�����2��(������)�ġ���Ч����������(2)pi,����æ�(2)pi�����1��(�����)�ġ���Ч����������(1)pi��ֻҪ�����Щ������,������ϵ����������
EBPA����Ҫ��������ѵ��,ͨ�����㷨Ȩֵ������ʵʱ���¿��Ա�֤�������Ľ����ȶ���,�Ӷ���֤EBPA�ıƽ�����,����EBPA�ͻ���ֳ����߿��Ƶ��������ԡ�
3 �ŷ�ϵͳ����ѧϰEBPA������ƽṹ
UAV�����ŷ�ϵͳ������ѧϰEBPA������ƽṹ��ͼ3��ʾ��
ͼ3��,���ص������ֱ����,��������UAV�����ŷ�ϵͳ�Ļ�ת����ء����ص��ǰ��ĵ�ѹԴ��������(pulse width modulated,���PWM)���ʷŴ��·�����˵�����У������, �������ɳ�ַ������ص���Ĺ�������, ���������ص������ʱ�Ĵ������������ͨ��ǰһ�����ٶȿ������Ͳ��ٻ������ٵ�����·������ص�����ٶȻ�·�ıջ�����[14]��λ�û���·�еķ���Ԫ�����õ��ǹ�����̼��������·, ����I/O����������Ĺ�������ź�һ·��������ܹ��ػ��е�λ�ÿ�������������ģ�鹹�����ֱջ���·�����н��㴦��,�ñջ��ɱ�֤UAV�����ŷ�ϵͳ�ﵽ�ܸߵĶ�λ����;����һ·��������ܹ��ػ��е�EBPAģ�顣�������ջ����ƽṹ����һ������ģ���Ͽ���ϵͳ, ������Ч������ŷ�ϵͳ�Ŀ��ƾ���, ��ǿ��UAV�����ŷ�ϵͳ��³���ԺͿɿ���, ������ʵ������ʱ���ֹ���״̬��Ҫ��
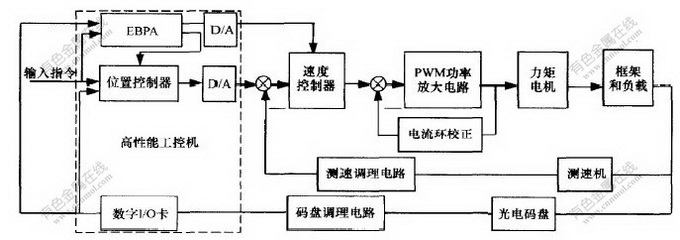
ͼ 3 UAV�����ŷ�ϵͳ����ѧϰ����������ƽṹͼ
Fig. 3 Overall control structure diagram of UAV simulation servo system using EBPA
�����ܹ��ػ��е�EBPAģ���������ѧϰ����,��������������롢�����㡢�����3������EBPA,�����ֱ�Ϊ����ָ���źźͷ������ֽ�����λ���ź�;�м�㵥Ԫ��Ϊ12��;�������Ϊ2�������Ԫ,����ѵ���������λ�ú��ٶ�,�����ٶ�ͨ��D/Aת�����͵��ٶȿ�����;λ�ÿ����������Ե���PID����[15, 16]��
ѵ����������ѵ������кܴ�Ӱ�졣������Խ��,��ѵ�����Խ��ȷ,������ʱ������,��Ӱ��UAV�����ŷ�ϵͳ��ʵʱ�ԡ�����,����ѡ���������dz���Ҫ��
4 ����Ӧ��
����Ƶĵ�����EBPA����ѧϰ���Ʒ���Ӧ���������������Ƶ�ij��UAV�����ɶȷ����ŷ�ϵͳ����UAV�����ɶȷ����ŷ�ϵͳ�����������롢�����㡢�����3������EBPA���Ʋ���,�����ֱ�Ϊ����ָ���źźͷ������ֽ�����λ���ź�;�м�㵥Ԫ��Ϊ12��;�������Ϊ2�������Ԫ������ʵ����Ҫ,�����趨�������ָ��Ϊ0.05��������̽ѵ��,������Ϊ30ʱ�����Ϊ����,��ʱ,���������ܹ���ӳϵͳ�Ļ�������,���Եõ�Ԥ�ڵĿ���Ч����
ͨ����ij��UAV�������ݴ��������к�ʵ�������ʵʱ����ʵ��,�����ѵ��������ͼ4��ʾ��
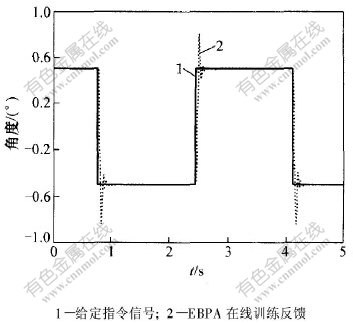
ͼ 4 �����㷨����ѧϰ����
��ʵ��ʵʱ����ʵ������
Fig. 4 Hardware-in-loop real-time simulation feedback curve using EBPA on-line learning control strategy
��ͼ4�ɼ�,��UAV�����ŷ�ϵͳ�������źŵĶ�̬��Ӧ�ܿ�,�����Ժ�,ϵͳ��³���Ժ�ǿ,���нϺõĿ���Ч����
5 �� ��
a. �������㷨����ѧϰ���������۷���,��������ѧϰ����Ӧ����UAV�����ŷ�ϵͳ��
b. ʵ��Ӧ�ý������,�����㷨������ѧϰ���������Ժ�,������С,��̬��Ӧ�졣
�����:
[1]ALMENDINGER F, ELM J, MARCHETTI J, et al. Flight Motion Simulator Performance Improvements from Advanced Data Acquisition[A]. Proceedings of SPIE��the International Society for Optical Engineering[C]. Orlando, 2001.
[2]��ʿ��. ģ������,����������ܿ�����[M].������: ��������ҵ��ѧ������,1998.
LI Shi-yong. Fuzzy Control, Neural Networks and Intelligent Cybernetics[M]. Harbin: Harbin Institute of Technology Press, 1998.
[3]OMIDVAR O, DAYHOFF J. Neural Networks and Pattern Recognition[M].San Diego: Academic Press, 1998.
[4]XIE Y, VILATHGAMUWA M, TSENG K J, et al. Modeling and Robust Adaptive Control of a Three-axis Motion Simulator[A]. IEEE Industry Applications Society Annual Meeting[C]. Chicago, 2001.
[5]������.������з������ת̨Ƶ���ؿ������о�[J]. �������,2000,18(3):10-15.
LI Zhi-ming. The Research on Widening the Band for Three-axis Flight Simulation Table[J]. Aerospace Control, 2000, 18(3): 10-15.
[6]������. ������ϵͳ���ۼ���Ӧ��[M].����:��ѧ������,1998.
SHEN Shi-yi. Neural Networks Theory and Its Application[M]. Beijing: Science Press, 1998.
[7]KAMARTHI V S, PITTNER S. Accelerating Neural Network Training Using Weight Extrapolations[J]. Neural Networks, 1999, 12(9): 1285-1299.
[8]����.������ģ��[M].����:����������ѧ������,1998.
CHEN Ming. Neural Networks Model[M]. Dalian: Dalian University of Technology Press, 1998.
[9]KAMIO T, TANAKA S, MORISUE M. Back Propagation Algorithm for Logic Oriented Neural Networks[A]. Proceedings of the IEEE-INNS-ENNS International Joint Conference on Neural Networks[C]. Como, 2000.
[10]CAMPOLUCCI P, UNCINI A, PIAZZA F, et al. On-line Learning Algorithms for Locally Recurrent Neural Networks[J]. IEEE Transactions on Neural Networks, 1999, 10(2): 253-271.
[11]CHEN C P, MILLS K J, VUKOVICH G. Neural Network Learning and Generalization for Performance Improvement of Industrial Robots[A]. Proceedings of the Canadian Conference on Electrical and Computer Engineering[C]. Calgary, 1996.
[12]ZHANG Bo, ZHANG Ling. Analysis and Improvement of Artificial Neural Network Models[A]. Proceedings of the IEEE International Conference on Intelligent Processing Systems[C]. Gold Coast, 1998.
[13]�����, �κ���, ������. �����˹�������BP�㷨�ĵ����ڿ����о�[J].�����Զ���, 2003, 22(3):41-44.
YU Xiu-fen, DUAN Hai-bin, GONG Hua-jun. Research for Inverted Pendulum Control Based on BP Algorithm of ANN[J]. Ordnance Industry Automation, 2003, 22(3):41-44.
[14]DUAN Hai-bin, WANG Dao-bo, HUANG Xiang-hua, et al. Research on Non-linear Angular Potentiometer and Its Application in Simulation Servo System[J]. Journal of Sichuan University, 2004, 41(3): 551�C554.
[15]CHEN C P, MILLS K J. Synthesis of Neural Networks and PID Control for Performance Improvement of Industrial Robots[J]. Journal of Intelligent and Robotic Systems: Theory & Applications, 1997, 20(2-4): 157-180.
[16]Kawafuku M, Sasaki M, Kato S. Self-tuning PID Control of a Flexible Micro-actuator Using Neural Networks[A]. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics[C]. San Diego, 1998.
�ո�����:2004-06-18
������Ŀ:���Һ��ջ�����ѧ����������Ŀ(01C52015); ����ʡ��333���̡�����������Ŀ(2002��)
�����:�κ���(1976-),��,ɽ����Ӫ��,��ʿ�о���,�������ܽ����㷨���߾��ȷ����ŷ�ϵͳ��ơ��Ƚ����������빤��Ӧ���о�
������ϵ��: �κ���,��,��ʿ�о���;�绰:025-84890894(H), 13182949586(�ֻ�); E-mail: hebinduan@126.com

