DOI: 10.11817/j.issn.1672-7207.2016.08.020
基于坐标系动态变化的无人机着舰引导算法
郑峰婴1,龚华军2,甄子洋2
(1. 南京航空航天大学 航天学院,江苏 南京,210016;
2. 南京航空航天大学 自动化学院,江苏 南京,210016)
摘要:针对无人机着舰区域动态变化,难以精确预估的问题,设计一种基于新坐标体系动态变化的自动着舰引导算法。在捕获阶段,新坐标系随无人机空间位置的变化而动态变化;在跟踪阶段,新坐标系随回收着舰区域的变化而动态变化,计算无人机在新坐标系下的速度和位置误差,经轨迹控制器修正误差,实现无人机的精确引导。以现役某型舰载无人机为对象,搭建综合仿真平台,设计飞行控制系统,优化轨迹控制器参数,加入舰尾流和导航误差,完成引导性能的验证与评估。研究结果表明:该自动着舰系统能引导无人机实现较精确地撞网着舰回收,着舰性能符合要求。
关键词:无人机;自动着舰;引导算法;飞行控制;轨迹引导
中图分类号:V249.1 文献标志码:A 文章编号:1672-7207(2016)08-2685-09
Carrier UAV autonomous landing algorithm based on dynamic change of coordinate system
ZHENG Fengying1, GONG Huajun2, ZHEN Ziyang2
(1. School of Astronautics, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China;
2. School of Automation Engineering, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China)
Abstract: According to the dynamic changes of landing target difficult to accurately estimate, an autonomous landing algorithm was designed based on a new coordinate system with dynamic change. The new coordinate system changed dynamically with the trajectory of unmanned aerial vehicle (UAV) in the capturing phase, and changed with the ideal landing area in the tracking phase. The UAV’s speed and position errors were calculated in the new coordinate system, the errors were corrected through the trajectory controller, and UAV accurate guidance was realized. An active service carrier UAV was regarded as the research object, the simulation system was constructed, and the flight control system was designed. Finally, the trajectory control parameter was optimized. Air wake and navigation error were added to verify and evaluate the performance of landing. The results show that this system can effectively guide the UAV to safely landing, and the landing performances can meet the design target.
Key words: carrier UAV; autonomic landing; landing algorithm; flight control; trajectory guiding
由于舰载无人机在未来海战中的广阔应用前景,各海军强国已将其列为面向未来大中型舰艇的重要装备之一。目前,大多数舰载无人机从起飞到降落的整个飞行阶段均通过遥控设备来保证稳定性和可控性。随着科技的不断发展,海军强国要求舰载无人机能够进行自主/自动起飞、降落,因此,对无人机自动着舰系统的研究显得尤其重要,其关键技术是引导无人机使其精确着舰回收[1-2]。由于技术不公开,国内外在这一方面公开报道的研究成果较少,且大多为以有人驾驶的舰载机为模型进行自动着舰技术领域的研究[3-5]。就无人机引导技术而言,典型的陆基无人机进场着陆时,通常针对目标着陆区设定最优轨迹,然后设计控制器精确跟踪该轨迹。例如,HORN等[6]采用神经网络目标函数优化法设计无人机飞行轨迹,以提高运算速度,实现单一或编队无人机轨迹优化;CHAMSEDDINE等[7]针对飞行包线及控制限制的问题,给出一种简单有效的轨迹规划及重新规划策略,避免复杂的优化问题;SIKHA等[8]为快速实现无人机轨迹跟踪,采用三维空间几何算法设计飞行轨迹,并通过PID控制器实现轨迹精确跟踪;ZHANG等[9]针对某固定翼无人机轨迹控制系统,提出一种非线性轨迹跟踪方法实现运动特性确定的目标区域跟踪。然而,舰基无人机和陆基无人机的降落环境完全不同,实际着舰情况也完全不同。由于受海浪运动的影响,深海的舰船振荡会导致理想着舰区域产生周期性位移,成为动态目标,如果最终的着舰区域没有足够的时间提前预测,那么,在最后阶段无法设计出最佳的飞行路线。在航母-舰载机着舰系统中,主要采用常规的经典引导算法,例如,KHANTSIS[10]在无人机轨迹控制环节,采用比例引导法,试图优化引导策略及参数,实现着舰引导;STORVIK[11]根据无人直升机与舰船的位置信息,采用直接视线法,实现舰载无人直升机自主定点返航;郑峰婴等[12]提出侧偏消除法以抑制侧风运动对着舰性能的影响。随着计算机技术和现代控制理论、非线性控制理论的发展,最优控制、自适应控制、动态逆控制等先进控制方法也应用到了着舰中;BANNETT[13]为了提高设计效率与控制精度,将最优控制方法应用于F-8C的自动着舰纵侧向轨迹控制系统设计,解决了传统方法中高度控制和自动油门视为独立通道而分开设计的不足之处,提供了一种多变量控制器的设计方法;袁锁中等[14]用 控制方法设计舰载飞机自动着舰导引系统,有效地提高了导引系统着舰轨迹跟踪精度及抗气流扰动的能力;朱齐丹等[15-16]针对着舰过程中的舰载机非线性运动模型,提出了一种基于非线性动态逆的滑模控制方法,解决舰载机精确控制飞行轨迹的问题。然而这些方法都受限于目标区域的动态变化,如果动态变化预测不准确,引导性能将显著下降。此外,为了提高着舰性能,往往在控制器中加甲板补偿器,以补偿理想着舰区域动态变化引起的着舰偏差,这样会增加控制系统的复杂性。杨一栋[17]针对无人机着舰回收系统,将无人机着舰的过程分为捕获和跟踪2个阶段,提出一种基于轨迹误差消除的无人机着舰引导方法。但该方法并没有考虑算法的局限性,也没有考虑甲板运动引起的着舰动态区域变化对引导算法的影响。本文作者在此基础上,针对无人机着舰目标与下滑轨迹动态变化的问题,提出基于坐标系动态变化的无人机自动着舰引导算法。定义新的坐标体系{F}捕获阶段,{F}随无人机位置变化而变化。在跟踪阶段,{F}随理想着舰点的变化而变化,计算无人机在该{F}坐标系下的速度和位置误差,可解决捕获和跟踪阶段速度矢量偏差、算法发散等问题,实现飞机下滑轨迹与舰运动同步。与传统的方法相比,一方面,它不需要提前动态规划飞行轨迹曲线,引导系统结构较简单,算法易实现,系统可靠性提高;另一方面,可避免在控制器中加甲板补偿器[18],降低控制系统的复杂性。
控制方法设计舰载飞机自动着舰导引系统,有效地提高了导引系统着舰轨迹跟踪精度及抗气流扰动的能力;朱齐丹等[15-16]针对着舰过程中的舰载机非线性运动模型,提出了一种基于非线性动态逆的滑模控制方法,解决舰载机精确控制飞行轨迹的问题。然而这些方法都受限于目标区域的动态变化,如果动态变化预测不准确,引导性能将显著下降。此外,为了提高着舰性能,往往在控制器中加甲板补偿器,以补偿理想着舰区域动态变化引起的着舰偏差,这样会增加控制系统的复杂性。杨一栋[17]针对无人机着舰回收系统,将无人机着舰的过程分为捕获和跟踪2个阶段,提出一种基于轨迹误差消除的无人机着舰引导方法。但该方法并没有考虑算法的局限性,也没有考虑甲板运动引起的着舰动态区域变化对引导算法的影响。本文作者在此基础上,针对无人机着舰目标与下滑轨迹动态变化的问题,提出基于坐标系动态变化的无人机自动着舰引导算法。定义新的坐标体系{F}捕获阶段,{F}随无人机位置变化而变化。在跟踪阶段,{F}随理想着舰点的变化而变化,计算无人机在该{F}坐标系下的速度和位置误差,可解决捕获和跟踪阶段速度矢量偏差、算法发散等问题,实现飞机下滑轨迹与舰运动同步。与传统的方法相比,一方面,它不需要提前动态规划飞行轨迹曲线,引导系统结构较简单,算法易实现,系统可靠性提高;另一方面,可避免在控制器中加甲板补偿器[18],降低控制系统的复杂性。
1 无人机自动着舰引导系统
定义地面坐标轴{L},其原点为O,固定在地面某一点,X轴在水平面指向正东,Y轴指向正北,Z轴垂直正交X和Y,其指向按照右手定则确定。
研究中假定无人机着舰回收方式为撞网回收,可任意选定无人机初始位置及初始速度方向,引导舰载无人机至指定着舰点的过程分为捕获和跟踪2个阶段。
在捕获阶段,指引舰载机从任一飞行状态至某固定点,定义为捕获点,如图1中p0点。假定航母直线航行,vuav为无人机飞行速度,vland为着舰点前进速度,在捕获阶段因距舰较远,只考虑导航误差,不考虑航母运动、舰尾流对飞行轨迹的影响。在跟踪阶段,控制飞机速度和位置方向,使其对准理想着舰点。在接近航母时,必须考虑由于海浪运动引起的理想着舰点的变化,以及舰尾气流扰动对无人机着舰的影响。

图1 无人机自动着舰引导系统示意图
Fig. 1 Schematic diagram of UAV automatic carrier landing

图2 无人机自动着舰引导系统结构配置图
Fig. 2 Structural allocation of UAV automatic carrier landing system
无人机自动着舰引导系统的结构配置如图2所示,包含舰载无人机动力学和运动学、飞控系统、自动着舰引导算法、轨迹控制器(引导律计算)等环节。其中vuav0和puav0分别为初始时刻速度和位置矢量;△v和△p为无人机速度和位置矢量变化量;△θc为纵向通道的俯仰控制期望值; 为横侧向通道的滚转控制期望值;
为横侧向通道的滚转控制期望值; 和
和 分别为飞控系统输出的升降舵和油门偏转量;
分别为飞控系统输出的升降舵和油门偏转量; 和
和 分别为副翼舵和方向舵偏转量;
分别为副翼舵和方向舵偏转量; ,
, ,
, 和
和 为经作动器后输出的舵面偏转量;ps为航母运动引起的理想着舰点位移,外界干扰包括舰尾流、导航误差等影响因素。
为经作动器后输出的舵面偏转量;ps为航母运动引起的理想着舰点位移,外界干扰包括舰尾流、导航误差等影响因素。
根据无人机当前的速度信息vuav和位置信息puav,由自动着舰引导算法计算其速度误差verr和位置误差perr。将误差信号引入轨迹控制器,通过引导律计算,给出控制指令 和
和 ,飞控系统接收该指令后,操纵飞机不断修正姿态和航迹,最终消除位置和速度偏差,引导无人机沿理想轨迹着舰。
,飞控系统接收该指令后,操纵飞机不断修正姿态和航迹,最终消除位置和速度偏差,引导无人机沿理想轨迹着舰。
2 自动着舰引导算法设计
2.1 捕获点p0位置计算
p0点的几何位置如图3所示,计算p0时,首先确认无海浪运动影响时,着舰时刻回收网的中心位置pt和方向 。令回收网主对角线的点为p1和p2,回收网中点位置为pt,矢量
。令回收网主对角线的点为p1和p2,回收网中点位置为pt,矢量 表示回收网的垂直方向,见图3,假定着舰过程中
表示回收网的垂直方向,见图3,假定着舰过程中 不变,回收网的法向矢量只在XY平面内移动。
不变,回收网的法向矢量只在XY平面内移动。
回收网中点的位置pt可表示为
 (1)
(1)
主对角线方向为
 (2)
(2)
由共面矢量和 ,可得回收网的法向矢量为
,可得回收网的法向矢量为
 (3)
(3)
由此,可确定回收网在三维空间的位置和方向。根据回收网位置和方向计算p0,当回收网的法向矢量指向X轴,可得p0为
 (4)
(4)
式中:γ为p0pt与水平面的夹角;D为p0pt长度。
当不指向X轴,需采用另一种方法计算p0。定义新的坐标系{G},以上标G表示,原点为pt,X轴指向p0,见图3。图3中,地理坐标系{L}以上标L表示。

图3 捕获阶段示意图
Fig.3 Diagram of glide slope capturing
令 ,计算坐标系{G}与地理坐标系{L}之间的欧拉角:
,计算坐标系{G}与地理坐标系{L}之间的欧拉角: ,
, ,
, 。式中,
。式中, 和
和 分别为在地理坐标系X轴和Y轴上的分量。由此,得p0在地理坐标系下的位置为
分别为在地理坐标系X轴和Y轴上的分量。由此,得p0在地理坐标系下的位置为
 (5)
(5)
式中: 表示{G}到{L}的转换矩阵,可由坐标系{G}和{L}的欧拉角计算得到,且
表示{G}到{L}的转换矩阵,可由坐标系{G}和{L}的欧拉角计算得到,且 。
。
2.2 捕获和跟踪阶段的引导算法
在进场捕获阶段,令无人机在飞行过程中重心的位置矢量为puav,p0到无人机重心位置的距离为: ,定义新的坐标体系{F},原点为无人机重心位置puav,以单位矢量T,N和B表示,新坐标系{F}根据无人机的位置变化而动态变化,如图3所示。
,定义新的坐标体系{F},原点为无人机重心位置puav,以单位矢量T,N和B表示,新坐标系{F}根据无人机的位置变化而动态变化,如图3所示。
T表示UAV的重心指向p0点,其表达式为
 (6)
(6)
N定义为
 (7)
(7)
式中:xT和yT为T在地理坐标系X轴和Y轴上的分量,由右手法则得
 (8)
(8)
进场时,若无人机按指令速度vc飞行,期望引导舰载无人机,使其速度方向对准T。如此,可将无人机捕获到p0点,计算无人机在{F}坐标下的速度误差和位置误差,以产生正确的控制信号。
无人机在{L}坐标系下的速度误差为
 (9)
(9)
式中:vc为指令速度;Tvc为T轴上长度与vc一致的量。
由此,可得{F}坐标系下的速度误差ve为
 (10)
(10)
当无人机速度方向对准T,且按指令速度vc飞行时,速度误差为0。
在跟踪阶段,{F}坐标体系中的矢量T定义为p0点指向回收网中点,在着舰的最后阶段必须考虑航母运动引起回收网中点的随机正弦位移ps,假定着舰时飞机速度为va=25 m/s,在着舰前约12.5 s加入ps,因此,T的表达式为:
 (11)
(11)
式中:X为飞机与理想着舰点的距离。在最后着舰阶段,T随着理想着舰点的位置变化而变化,令
 (12)
(12)
则得
 (13)
(13)
N和B的获取方法与先前描述的一致。在跟踪阶段,指引无人机从p0点飞行至理想着舰点位置pm。
令 ,由此,可将期望的轨迹参数化:
,由此,可将期望的轨迹参数化:
 (14)
(14)
式中:p0为捕获点位置,0≤S≤L。
p0可表示为
 (15)
(15)
代入式(14),得理想轨迹 为
为
 (16)
(16)
定义了理想的惯性轨迹后,UAV位置误差pe(S)为
 (17)
(17)
计算使位置误差为最小的参数S,即
 (18)
(18)
上述问题可以表示为
 (19)
(19)
将式(16)代入式(19),得
 (20)
(20)
由此可得
 (21)
(21)
将式(21)代入式(16),得理想轨迹为
 (22)
(22)
将式(22)代入式(17),可得{L}坐标系下的位置误差pe(S)为
 (23)
(23)
由此,可得{F}坐标系下的位置误差为
 (24)
(24)
经计算得
 (25)
(25)
同理,可得{F}坐标系下的速度误差为
 (26)
(26)
2.3 引导算法调整
在研究中发现,实际引导算法的运行过程中需要解决3个问题。
2.3.1 捕获阶段稳态时存在速度矢量与T相反的情况
在捕获阶段,令 ,则上述误差方程可分解为3个约束条件:
,则上述误差方程可分解为3个约束条件: ;
; =0;
=0; =0。对于前2个约束条件,可通过引导律信息控制纵向和侧向飞控系统保持速度误差在{F}坐标系Y轴和Z轴的分量为0;对于第1个约束条件,进场着舰时,可通过速度控制系统保持速度恒定不变,为指令值vc,但不能保证速度矢量指向T。
=0。对于前2个约束条件,可通过引导律信息控制纵向和侧向飞控系统保持速度误差在{F}坐标系Y轴和Z轴的分量为0;对于第1个约束条件,进场着舰时,可通过速度控制系统保持速度恒定不变,为指令值vc,但不能保证速度矢量指向T。
由此,在控制系统(包括引导律和飞控律)作用下,捕获阶段的引导算法中存在2种情况:1) 无人机按指令速度vc飞行,且速度方向vuav对准T,vuav和T的夹角为0°;这是所期望的飞行轨迹,如图4(a)所示;2) 存在完全相反的一种情况,无人机按指令速度vc飞行,但无人机速度方向与T夹角为180°,如图4(b)所示,这是引导算法中需要避免的。为解决这一问题,需将vuav和T的夹角也作为误差信号引入控制系统,稳态时令其夹角为0°。

图4 捕获阶段引导算法存在的2种情况
Fig. 4 Two cases of guidance algorithm in capturing
2.3.2 跟踪初始阶段速度矢量不对准p0pt的问题
根据上述方法可保证无人机经过p0点,但不能保证无人机到达p0点时,它的速度矢量对准p0pt连线,如图5中曲线2所示。若不对算法加以调整,则无人机到达p0时速度矢量如图5中vuav(1)所示,飞行轨迹如图5中曲线1所示。
为使无人机在捕获p0点时,其速度矢量如vuav(2)所示,对准p0pt连线,一直计算无人机与p0pt连线的距离。当距离小于某一值时,如图5中的A点,即进入跟踪阶段的引导算法。
2.3.3 算法发散的问题
运行自动着舰引导算法时,有2种情况会导致算法发散:1) 由于不限制无人机的初始位置与初始速度方向,则在捕获的初始阶段有可能存在飞机速度方向(XY平面)和理想轨迹之间的角度非常大的情况;2) 接近p0点,进入跟踪阶段时,速度方向与p0pt连线之间夹角非常大的情况,如图6所示,其中Txy为矢量T在xy平面的投影。

图5 速度矢量与下滑轨迹的夹角
Fig. 5 Angle between velocity and glide path

图6 初始速度方向远偏离着舰点前进方向
Fig. 6 Initial velocity far from landing point direction
在这2种情况下,自动着舰算法有可能会发散,或收敛得非常慢,如果不对算法进行调整,就会影响着舰性能。此时,可引入调节器,输入大的常值滚转指令,并根据位置和速度误差,确定滚转指令的正负值。由此,可使舰载机速度方向快速对准理想轨迹方向,以保证算法有效。
3 自动着舰控制系统设计
3.1 飞控律设计
以国外现役某型舰载无人机为例[19],建立其全向非线性动力学和运动学模型,随后,以舰载无人机进场时定常直线飞行状态为基准点进行配平及线性化,得到该型无人机纵向和横侧向标称运动方程。根据无人机纵侧向自然特性,本文采用如下控制律:
 (27)
(27)
式中: 为迎角变化量;
为迎角变化量; 为初始迎角;
为初始迎角; 为法向过载变化量;
为法向过载变化量; 为俯仰角变化量;
为俯仰角变化量; 为滚转角变化量;
为滚转角变化量; 为滚转角速度变化量;
为滚转角速度变化量; 为偏航角速度变化量;
为偏航角速度变化量; 为侧滑角变化量;
为侧滑角变化量; ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, 为控制律增益常数;
为控制律增益常数; ,
, 和
和 为滤波器增益常数;s为传递函数变量符号。
为滤波器增益常数;s为传递函数变量符号。
油门通道为保持迎角恒定的动力补偿系统,同时保持速度恒定;升降舵和副翼舵通道分别控制飞机的俯仰角、俯仰角速率和滚转角、滚转角速率,以达到控制航迹的目的,方向舵通道主要起滚转协调的作用。
此外,该型无人机作动器为带有速率和位置限制的二阶系统。其自然频率为50 Hz,阻尼为1,截止频率为5 Hz。经设计,飞控律各参数为:

3.2 引导律设计
设计的纵向飞控系统为俯仰姿态系统,引导律将输出飞机俯仰信号 , 设计纵向通道的引导律为
, 设计纵向通道的引导律为

 (28)
(28)
式中: 为无人机位置误差perr的纵向分量;verrZ为无人机速度误差verr的纵向分量;Kc为前向回路增益;Kp与Ka为滤波器增益常数;τ1为积分常数;τ2为速度常数;τ3为加速度常数。
为无人机位置误差perr的纵向分量;verrZ为无人机速度误差verr的纵向分量;Kc为前向回路增益;Kp与Ka为滤波器增益常数;τ1为积分常数;τ2为速度常数;τ3为加速度常数。
K(X)及R(X)为飞机与理想目标点距离X有关的项,捕获阶段理想目标点为p0点,跟踪阶段理想目标点为理想着舰点。



 (29)
(29)
式中:k1,k2和k3为增益常数;LRX1,LRX2,LRX3,LRX4,LR1,LR2,LR3,LV1,LV2,LVX1和LVX2为与距离有关的量。
经设计,纵向通道引导律传递函数各参数为:Kc=0.132 8,Kp=6.25,Ka=0.42,τ1=0.1,τ2=2.0,τ3=2.8,LRX1=9 000,LRX2=1 800,LRX3=900,LRX4=720,LR1=0.25,LR2=1,LR3=1.25,LVX1=6 780,LVX2=2 280,LV1=0.2,LV2=1。侧向飞控系统为横滚姿态系统,引导律结构与纵向的类似。
4 无人机自动着舰系统仿真评估
仿真时,在自动着舰引导算法中引入舰运动学,在飞行轨迹计算中加入导航误差,在飞控系统中加入舰尾流的影响,见图2。美国海军航空兵武器系统部(NAVAIR) 提供舰运动学及导航误差[20],MIL-F-8785C军用规范给出特定的大气扰动数学模型[21]。
仿真初始条件如下:在地理坐标系{L}下,设定pt坐标为(0,0,0),p0点的坐标为(983.5,983.5,85),单位为m。航母前进速度vs=15 m/s,下滑角γ0=3.5°,飞机前进速度为指令速度va=25 m/s。
假定选取无人机初始位置(-1 000,200,86)(单位为m),初始速度方向单位矢量(1,0,0),俯仰和滚转指令限幅为±10°。图7所示为1个完整的自动着舰三维视图。图8所示为着舰的XY平面图和YZ平面图。

图7 无人机着舰三维图
Fig. 7 Three-dimensional plot of a UAV landing
图9所示为捕获及跟踪阶段侧向和纵向位置、速度误差及飞控系统控制指令偏转量。veY,veZ,peY和peZ分别为无人机速度和位置在{F}坐标系下侧向和纵向误差。由图9可以看出:在捕获阶段,由于{F}坐标系T为无人机重心指向p0点,所以,位置误差始终为0,速度误差约在22 s后收敛,无人机在55 s时接近p0点,转入跟踪阶段,速度和位置误差约在20 s趋近于0。

图8 无人机着舰XY平面图和YZ平面图
Fig. 8 XY and YZ plots of a UAV landing

图9 位置、速度误差及飞控系统指令偏转量
Fig. 9 Positions, velocity errors and amount of deflection flight system command
存在飞机初始速度方向与理想航迹之间的夹角非常大的情况。选取无人机初始位置坐标为(1 000,1 400,130),速度方向单位矢量为(0.5,0.866,0),在捕获初始阶段输入大小为10°的常值滚转指令,使其速度方向快速对准p0点,着舰过程如图10所示。
由图7~10可见:任意选定无人机的速度方向和初始位置,所设计的无人机自动着舰系统均能很好地引导无人机着舰,自动着舰算法及引导律设计效果较好。
以海况4为例评估着舰性能,运行近500次仿真,无人机的初始速度方向在XY平面内,以与X轴的夹角60°为间隔从0°到360°之间变化。初始位置在X轴和Y轴上,以250 m的增量从-750 m变化到750 m。初始高度从75 m开始以25 m为增量变化至125 m。

图10 无人机大的常值滚转速率指令引导结果
Fig. 10 Results of UAV landing under large values of roll rate command
表1所示为不同干扰因素影响下无人机的着舰性能。其中,Seastate 4表示加入海况4;Nav 表示加入导航误差;Airwake表示加入舰尾流。图11所示为在海况4下,加入舰尾流和导航误差后的着舰分布。
由图11可以看出:仅由海况影响平均误差和标准偏差较小,加入导航误差后,对着舰性能的影响较小,基本可以忽略。舰尾流对着舰性能影响较大,平均误差和标准偏差显著增加,着舰点分布范围变宽,此外,数值仿真结果表明,在这3种着舰条件下,平均误差和标准差均能符合自动着舰回收的规范[16, 20]。
表1 不同干扰因素下着舰性能分析
Table 1 Landing performance analysis with different disturbance sources

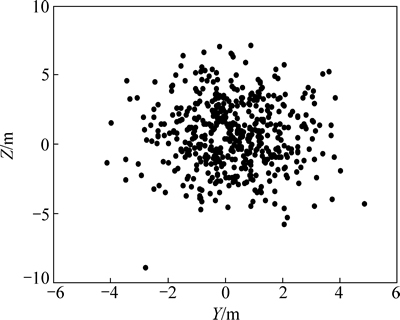
图11 无人机着舰点在回收网上的分布(YZ平面)
Fig. 11 YZ plot of position of UAV when crossing recovering net
5 结论
1) 设计了一种基于新定义坐标体系的自动着舰引导算法。在捕获阶段,新坐标系随无人机空间位置的变化而动态变化;在跟踪阶段,新坐标系随理想着舰区域的变化而变化,引导无人机在此坐标系下位置和速度误差为0,实现轨迹跟踪。在设计过程中解决了捕获和跟踪阶段速度矢量偏差、算法发散等问题。
2) 搭建了舰载无人机自动着舰引导与控制系统,完成自动着舰引导算法、飞行控制系统等所有模块的设计和仿真。
3) 在所设计的自动着舰引导与控制系统作用下,舰载无人机的着舰终端平均误差和标准偏差均符合性能指标要求。
参考文献:
[1] 唐大全, 毕波, 王旭尚, 等. 自动着陆/着舰技术综述[J]. 中国惯性技术学报, 2010, 18(5): 550-554.
TANG Daquan, BI Bo, WANG Xushan, et al. Summary on technology of automatic landing/carrier landing[J]. Journal of Chinese Inertial Technology, 2010, 18(5): 550-554.
[2] LI Junnan, DUAN Haibin. Simplified brain storm optimization approach to control parameter optimization in F/A-18 automatic carrier landing system[J]. Aerospace Science & Technology, 2015, 42: 187-195.
[3] XIA Guihua,DONG Ran,XU Jiangtao, et al. Linearized model of carrier-based aircraft dynamics in final-approach air condition[J]. Journal of Aircraft,2015, 53(1): 1-15.
[4] 周鑫, 彭荣鲲, 袁锁中. 舰载机理想着舰点垂直运动的预估与补偿[J]. 航空学报, 2013, 34(7): 1663-1669.
ZHOU Xin, PENG Rongkun, YUAN Suozhong. Prediction and compensation for vertical motion of ideal touchdown point in carrier landing[J]. 2013, 34(7): 1663-1669.
[5] JOHNSTON J S, SWENSON E D. Feasibility study of global positioning system based aircraft-carrier flight deck persistent monitoring system[J]. Journal of Aircraft, 2010, 47(5): 1624-1635.
[6] HORN J F, SCHMIDT E M, GEIGER B R, et al. Neural network-based trajectory optimization for unmanned aerial vehicles[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(2): 548-562.
[7] CHAMSEDDINE A, ZHANG Y M, RABBATH C A, et al. Trajectory planning and replanning strategies applied to a quadrotor unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(5): 1667-1671.
[8] SIKHA H, DEBASISH G. Optimal trajectory planning for unmanned aerial vehicles in three-dimensional space[J]. Journal of Aircraft, 2014, 51(2): 681-688.
[9] ZHANG Jiaming, LI Qing, CHENG Nong, et al. Nonlinear path-following method for fixed-wing unmanned aerial vehicles[J]. Journal of Zhejiang University Science C, 2013, 14(2): 125-132.
[10] KHANTSIS S. Control system design using evolutionary algorithms for autonomous shipboard recovery of unmanned aerial vehicles[D]. Melbourne: Royal Melbourne Institute of Technology. School of Aerospace, Mechanical & Manufacturing Engineering, 2006: 191-200.
[11] STORVIK M. Guidance system for automatic approach to a ship[D]. Trondheim: Norwegian University of Science and Technology. Mathematics and Electrical Engineering Department of Engineering Cybernetics, 2003: 32-68.
[12] 郑峰婴, 杨一栋. 变后掠翼舰载机抗侧风自动着舰引导系统[J]. 飞行力学, 2011, 29(2): 37-40.
ZHENG Fengying, YANG Yidong. Counteracting side wind in automatic carrier landing system for variable swept wing carrier-aircraft[J]. Flight Dynamics, 2011, 29(2): 37-40.
[13] BANNETT R J. Optimal control of the F-8C in a fully automatic carrier approach[R]. Springfield: National Technical Information Service, 1972: 1-6.
[14] 袁锁中, 杨一栋. 舰载飞机着舰精确轨迹跟踪控制研究[J]. 飞行力学, 2000, 18(3): 22-25.
YUAN Suozhong, YANG Yidong. Precision flight path control in carrier landing approach[J]. Flight Dynamics, 2000, 18(3): 22-25.
[15] 朱齐丹, 孟雪, 张智. 基于非线性动态逆滑模的纵向着舰系统设计[J]. 系统工程与电子技术, 2014, 36(10): 2037-2042.
ZHU Qidan, MENG Xue, ZHANG Zhi. Design of longitudinal carrier landing system using nonlinear dynamic inversion and sliding mode control[J]. Systems Engineering and Electronics, 2014, 36(10): 2037-2042.
[16] DENISON N A. Automated carrier landing of an unmanned combat aerial vehicle using dynamic inversion[D]. Alabama: Air University. Department of Air Force, 2007: 35-69.
[17] 杨一栋. 无人机着舰引导与控制[M]. 1版. 北京: 国防工业出版社, 2013: 52-64.
YANG Yidong. Guidance and control of carrier UAV landing[M]. 1st ed. Beijing: National Defence Industry Press, 2013: 52-64.
[18] 张永花. 舰载机着舰过程甲板运动建模及补偿技术研究[D]. 南京: 南京航空航天大学自动化学院, 2012: 22-46.
ZHANG Yonghua. Research on deck motion modeling and deck motion compensation for carrier landing[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. School of Automation Engineering, 2012: 22-46.
[19] LIZARRAGA M I. Autonomous landing system for a UAV[D]. California: Naval Postgraduate School. Electrical Engineer, 2010: 120-128.
[20] MIDSHIPMAN J F S. Design specifications development for unmanned aircraft carrier landings[D]. Maryland: United States Naval Academy. Department of Aerospace Engineering, 2003: 15-40.
[21] MIL-F-8785C, Military specifications-flying qualities of piloted airplanes[S].
(编辑 刘锦伟)
收稿日期:2015-08-07;修回日期:2015-10-11
基金项目(Foundation item):国家自然科学基金资助项目(61273050,61403197);航空科学基金资助项目(2013ZA52002);中央高校基本科研业务费专项资金资助项目(NS2015086)(Projects(61273050, 61403197) supported by the National Natural Science Foundation of China; Project (2013ZA52002) supported by the Aeronautical Science Foundation of China; Project(NS2015086) supported by the Fundamental Research Funds for the Central Universities)
通信作者:郑峰婴,博士,助理研究员,从事舰载机着舰技术研究;E-mail:zhfy@nuaa.edu.cn

