水下机器人自适应输出反馈控制设计
张利军1,齐雪1,庞永杰2,贾鹤鸣1
(1. 哈尔滨工程大学 自动化学院,黑龙江 哈尔滨,150001;
2. 哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨,150001)
摘要:研究水下机器人轨迹跟踪控制问题。在充分考虑不确定水动力系数的结构特征的基础上,提出基于动态递归模糊神经网络的自适应输出反馈控制策略。控制器由3部分组成:基于动态补偿器的输出反馈控制项、神经网络自适应控制项和鲁棒控制项。神经网络所需的自适应学习信号由线性观测器提供。利用Lyapunov稳定理论证明控制系统的稳定性。最后将所设计的控制方法应用于球形水下机器人ODIN,对其纵向、横向和艏向运动轨迹的跟踪问题进行了仿真实验,实验结果验证了控制方法的有效性。
关键词:水下机器人;自适应控制;输出反馈;动态递归模糊神经网络
中图分类号:TP242.6 文献标志码:A 文章编号:1672-7207(2011)S1-0464-05
Adaptive output feedback control of AUV
ZHANG Li-jun1, QI Xue1, PANG Yong-jie2, JIA He-ming1
(1. College of Automation, Harbin Engineering University, Harbin 150001, China;
2. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)
Abstract: The tracking control problem for autonomous underwater vehicles (AUV) was addressed. The structure of uncertain hydrodynamic coefficients was deeply analyzed, and an adaptive output feedback controller based on dynamic recurrent fuzzy neural network (DRFNN) was proposed. The controller was composed of three parts, i.e. the output feedback control based on dynamic compensator, neural network and robust control item. An observer was designed to provide the adaptive learning signal for neural network. The stability of the controller by Lyapunov theory was analysed. The method provided was used for an Omni-Direction Intelligent Navigator (ODIN). Validity of the theory was proved by simulation of the trajectory tracking of the surge, sway and heading angle.
Key words: autonomous underwater vehicle; adaptive control; output feedback; dynamic recurrent fuzzy neural network
水下机器人运动控制系统是一个多输入多输出的复杂非线性系统,它具有控制对象高度非线性、不确定性和工作环境高度复杂性的特征。Antonelli等[1]利用自适应控制算法研究了水下机器人运动轨迹的跟踪和定位问题,在一定程度上克服了由于模型结构不确定性所带来的相关控制问题。然而,上述控制算法是全状态反馈,需要知道水下机器人的位置及速度信息。对水下机器人来说,前向、侧移及深度方向的速度很难精确测量,这就给上述算法的实现带来了困难。为了解决水下机器人各自由度速度信息难于精确测量的问题,Gao等[2]给出了基于观测器的自适应控制算法,其中速度信息由线性观测器提供。动态递归模糊神经网络是动态过程辨识的一种有效方法[3]。它可以通过网络内部节点间的反馈去描述系统内部动态关系,它的内部反馈环节减少网络输入节点数,避免因增加输入个数而导致网络结构膨胀的问题,从而加快了收敛速度。基于文献[1-6],本文设计了基于动态递归模糊神经网络的自适应输出反馈控制器。该控制器结构简单,无需系统精确的数学模型。控制器由3部分组成:动态补偿器、神经网络自适应控制项和鲁棒控制项。其中,动态补偿器稳定误差系统线性部分。动态递归模糊神经网络用来补偿系统的不确定非线性部分,并解决了各自由度之间相互耦合问题。特别地,利用神经网络的回归特性,减少了输入变量个数,解决了因非线性部分存在微分关系导致更大噪声的问题。鲁棒控制项用来抵消神经网络建模误差和外界干扰。通过Lyapunov稳定性理论分析了闭环系统的稳定性。最后将此控制方法应用于球形水下机器人(ODIN)运动控制设计中,对其纵向、横向和艏向运动轨迹的跟踪问题进行仿真实验,验证了控制方法的有效性。
1 水下机器人建模
在载体坐标系下,水下机器人运动模型为
 (1)
(1)
其中:M为惯性矩阵; 为向心力和科氏力矩阵;
为向心力和科氏力矩阵; 为水动力阻力和升力矩阵;
为水动力阻力和升力矩阵; 为恢复力和力矩向量;
为恢复力和力矩向量; 为外界干扰力和力矩向量;
为外界干扰力和力矩向量; 为水下机器人位置和姿态向量,也是系统输出向量;
为水下机器人位置和姿态向量,也是系统输出向量; 为水下机器人在载体坐标系下的速度向量;
为水下机器人在载体坐标系下的速度向量; 表示作用在水下机器人载体坐标系下的控制向量,即力和力矩;J(η)为转换矩阵。对于给定的光滑期望轨迹
表示作用在水下机器人载体坐标系下的控制向量,即力和力矩;J(η)为转换矩阵。对于给定的光滑期望轨迹 ,
, 有界。定义
有界。定义 ,
, 并且
并且 ,
, 。
。
系统(1)可表示为:
 (2)
(2)
其中:




是一连续非线性未知函数。 为输出跟踪误差。对于系统(2),本文的控制目的是仅利用输出跟踪误差ξ1设计控制量τ,使闭环系统所有状态一致最终有界。
为输出跟踪误差。对于系统(2),本文的控制目的是仅利用输出跟踪误差ξ1设计控制量τ,使闭环系统所有状态一致最终有界。
2 神经网络自适应输出反馈控制 策略
对于跟踪误差动态系统(2),如果 和τd已知,控制器结构为如下形式:
和τd已知,控制器结构为如下形式:

 (3)
(3)
这时,系统(2)变为
 (4)
(4)
构建下列动态补偿器使得系统(4)渐近稳定。
 (5)
(5)
其中, ,
, 为设计参数矩阵。然而,由于水下机器人参数的时变性及其与环境之间复杂的相互作用,使得为未知非线性函数。本文将用带有动态递归模糊神经网络的补偿器,不妨设为u2,来补偿不确定项对系统动态性能的影响,并补充一项鲁棒控制项来抵消神经网络估计误差和外部干扰τd。下面给出u2,u3的设计过程。
为设计参数矩阵。然而,由于水下机器人参数的时变性及其与环境之间复杂的相互作用,使得为未知非线性函数。本文将用带有动态递归模糊神经网络的补偿器,不妨设为u2,来补偿不确定项对系统动态性能的影响,并补充一项鲁棒控制项来抵消神经网络估计误差和外部干扰τd。下面给出u2,u3的设计过程。
2.1 基于动态递归模糊神经网络的补偿器
 为神经网络输入向量,yN为神经网络输出向量。则
为神经网络输入向量,yN为神经网络输出向量。则

 (6)
(6)
其中: 为输出层连接权;m为规则数;w1为递归层连接权;μ为可选参数。
为输出层连接权;m为规则数;w1为递归层连接权;μ为可选参数。
 (7)
(7)
其中, 和
和 分别为高斯函数的中心和宽度。
分别为高斯函数的中心和宽度。
 (8)
(8)
 (9)
(9)
从式(8)和(9)可以看出:适用度 不仅包含由当前输入向量xN计算出来的模糊规则适用度
不仅包含由当前输入向量xN计算出来的模糊规则适用度 ,还包括前一时刻各适用 度[3]。
,还包括前一时刻各适用 度[3]。
本文采用动态递归模糊神经网络对函数进行在线学习逼近。然而,ξ2无法直接测量得到,不能作为神经网络输入向量。由于动态递归模糊神经网络带有内部反馈环节,具有记忆功能,能够动态地反映ξ1和ξ2之间的微分关系,这样可以选择可测量输出变量ξ1作为网络输入向量。另外,由 ,
, ,和
,和 之间的微分关系及动态递归模糊神经网络的特点,可以选择作为网络输入向量。由此,只需选择ξ1和作为动态递归模糊神经网络的输入向量,就可以对函数进行在线学习逼近,从而可以简化网络结构,加快网络参数学习速度。
之间的微分关系及动态递归模糊神经网络的特点,可以选择作为网络输入向量。由此,只需选择ξ1和作为动态递归模糊神经网络的输入向量,就可以对函数进行在线学习逼近,从而可以简化网络结构,加快网络参数学习速度。
定义动态递归模糊神经网络参数向量
其中: 为高斯函数中心矩阵,
为高斯函数中心矩阵, 为高斯函数宽度矩阵。由神经网络逼近理论知,存在一个紧集
为高斯函数宽度矩阵。由神经网络逼近理论知,存在一个紧集 ,使得当
,使得当 时,对于给定一个正常数
时,对于给定一个正常数 ,存在有界参数向量β,连续非线性函数能够被动态递归模糊神经网络
,存在有界参数向量β,连续非线性函数能够被动态递归模糊神经网络 在线逼近,即
在线逼近,即
 (10)
(10)
式中:ε是神经网络逼近误差向量,满足 。
。
由此,控制器(3)中的用控制项u2估计,即
 (11)
(11)
其中: 为β的估计值。
为β的估计值。
根据式(10)和(11),利用泰勒展式,则神经网络重构误差为:


 (12)
(12)
其中: ,并且
,并且 。这里假设:
。这里假设:
 (13)
(13)
 (14)
(14)
D1,D2为正常数。由神经网络参数的有界性和网络重构误差的有界性,上述假设成立。
2.2 鲁棒控制项
在控制器(3)中,外部干扰τd带有不确定性,这里假设τd有界,满足 ,D3为正常数。
,D3为正常数。
为了消除网络重构误差和外界干扰的影响,设计鲁棒控制项u3。将控制器(3)中的 替换为u3,则u3设计为如下形式:
替换为u3,则u3设计为如下形式:
 (15)
(15)
其中, 为ξ=[ξ1 ξ2 ξc]T的估计向量;P为正定对称矩阵;b=[0 1 0]T。由此,控制器(3)可以重新记为
为ξ=[ξ1 ξ2 ξc]T的估计向量;P为正定对称矩阵;b=[0 1 0]T。由此,控制器(3)可以重新记为
 (16)
(16)
2.3 观测器和自适应学习律
在u2的设计过程中,神经网络参数向量 的自适应学习律需要使用误差向量
的自适应学习律需要使用误差向量 ,其中,
,其中, 无法直接测量得到,因此首先设计观测器估计状态,然后通过Lyapunov方法获得的自适应学习律。
无法直接测量得到,因此首先设计观测器估计状态,然后通过Lyapunov方法获得的自适应学习律。
由式(2),(5)和(16)可以得到误差动态系统

 (17)
(17)
其中:ξ=[ξ1 ξ2 ξc]T; 。
。
定义向量 ,g是可测向量。在此定义下,误差动态系统又可写为:
,g是可测向量。在此定义下,误差动态系统又可写为:
 (18)
(18)
其中: 。
。
并且u2和u3的控制设计可以使

 (19)
(19)
以可测向量g作为输入信号,观测器结构如
 (20)
(20)
其中: 是估计误差;K是增益矩阵,A-KC渐近稳定。
是估计误差;K是增益矩阵,A-KC渐近稳定。
定义 ,
, 。
。
则观测误差动态系统为:

 (21)
(21)
利用式(20)和(21)可以估计出ξ2。
现在设动态递归模糊神经网络参数向量的自适应学习律为:
 (22)
(22)
其中, 为网络初始参数向量,
为网络初始参数向量, 是神经网络最佳参数向量。
是神经网络最佳参数向量。 ,并且假设
,并且假设 ;
; 为自适应增益矩阵;P为正定对称矩阵,满足Lyapunov方程
为自适应增益矩阵;P为正定对称矩阵,满足Lyapunov方程
 (23)
(23)
其中,Q>0。
3 稳定性分析
设 为正定对称矩阵,满足
为正定对称矩阵,满足
 (24)
(24)
这里, ,满足
,满足
 (25)
(25)
 为矩阵
为矩阵 的最小特征值。
的最小特征值。
定理1 考虑系统(2)和观测器动态方程(20),以及神经网络参数向量自适应律(22)和控制律(5),(11),(15),(16),则闭环系统误差信号 ,
, ,
, 最终有界。
最终有界。
证明 选取Lyapunov函数
 (26)
(26)


 (27)
(27)


 和
和 分别为矩阵P和的最大特征值。由式(27)得
分别为矩阵P和的最大特征值。由式(27)得
 (28)
(28)
当 时,V的界趋于
时,V的界趋于 。并且,如果
。并且,如果 ,γ1为正常数,则
,γ1为正常数,则
 (29)
(29)
即ξ最终有界。同理,和也最终有界。
4 仿真
根据水下机器人动力学模型和以上设计的控制器,本文采用MATLAB对球型水下机器人ODIN[1]进行仿真分析。假设ODIN保持在某一深度水域进行航行,由于ODIN具有球型结构,所以在水平方向有3种对称运动,这时只考虑三自由度运动即可, 为纵向运动位置、横向运动位置和艏向角组成的向量,
为纵向运动位置、横向运动位置和艏向角组成的向量, 为纵向运动速度、横向运动速度和艏向角速度组成的向量。惯性矩阵、向心力和科氏力矩阵、水动力阻尼力、转换矩阵分别为
为纵向运动速度、横向运动速度和艏向角速度组成的向量。惯性矩阵、向心力和科氏力矩阵、水动力阻尼力、转换矩阵分别为
 ,
,
 ,
,
外界干扰  ,其中,rand(・)
,其中,rand(・) [-1,1]。初始值位置向量和速度向量分别为:
[-1,1]。初始值位置向量和速度向量分别为:

期望轨迹为 ,
, ,
, ,对应的速度、加速度为相应轨迹的时间导数。
,对应的速度、加速度为相应轨迹的时间导数。
动态补偿器设计参数为:

神经网络初始参数向量为0, 。
。
观测器增益矩阵  。
。
鲁棒控制项系数 D2=0.1,D3=10。
图1~3分别为水下机器人三自由度跟踪误差曲线。从仿真结果可以看出,未知非线性部分对水下机器人运动效果有很大的影响。考虑随机有界干扰对水下机器人运动的影响,控制器能够有效补偿干扰,具有较强的鲁棒性。起初控制器的输出主要由线性动态补偿器提供,随着神经网络的不断学习,最终控制器的输出主要由神经网络控制项提供。实验结果表明:本文所提出的控制器设计方法可以很好地解决水下机器人轨迹跟踪问题。

图1 纵向跟踪误差曲线
Fig.1 Trajectory tracking error of surge
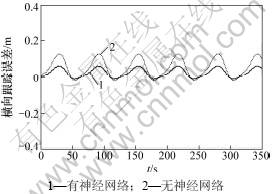
图2 横向跟踪误差曲线
Fig.2 Trajectory tracking error of sway
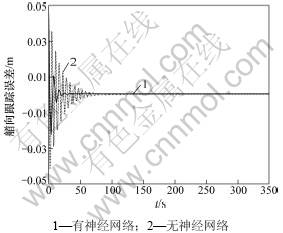
图3 艏向跟踪误差曲线
Fig.3 Trajectory tracking error of heading angle
5 结论
针对水下机器人动力学模型具有高度非线性和高度不确定性特点,提出了基于动态递归模糊神经网络自适应输出反馈控制方法。控制器结构简单,能够大大降低未知非线性部分对水下机器人运动的影响,能够有效地补偿1外界干扰,具有一定的鲁棒性。仿真结构表明:该控制方法可以达到理想的控制精度。
参考文献:
[1] Antonelli G, Chiaverini S, Sarkar N, et al. Adaptive control of an autonomous underwater vehicle: experimental results on ODIN[J]. IEEE Transactions on Control Systems Technology, 2001, 9(5): 756-765.
[2] GAO Jian-shu, XING Zhi-wei, ZHANG Hong-bo. Observer-based neural network adaptive control of underwater vehicles[J]. Robot, 2004, 26(6): 515-518.
[3] ZHANG Li-jun, QI Xue, PANG Yong-jie. Adaptive output feedback control based on DRFNN for AUV[J]. Ocean Engineering, 2009, 36(9/10): 716-722.
[4] Javadi-Moghaddam J, Bagheri A. An adaptive neuro-fuzzy sliding mode based genetic algorithm control system for under water remotely operated vehicle[J]. Expert Systems with Applications, 2010, 37(1): 647-660.
[5] Lapierre L. Robust diving control of an AUV[J]. Ocean Engineering, 2009, 36(1): 92-104.
[6] LI Jia-wang, SONG Bao-wei, SHAO Cheng. Tracking control of autonomous underwater vehicles with internal moving mass[J]. Acta Automatica Sinica, 2008, 34(10): 1319-1323.
(编辑 赵俊)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61174047);中国教育部门博士基金资助项目(20102304110003)
通信作者:齐雪(1981-),女,黑龙江宁安人,博士研究生,从事非线性输出反馈控制研究;电话:13766987068;E-mail:qixuesnow@163.com

