DOI: 10.11817/j.issn.1672-7207.2018.10.012
���������뾶��˫Բ��г�����ִ���Ħ��ѧ���ܵ�Ӱ��
����1���ܹ���1��������1, 2������1������1�����翵1
(1. �Ĵ���ѧ �����ѧ�빤��ѧԺ���Ĵ� �ɶ���610065��
2. �����ѧ ��е���������ص�ʵ���ң����죬400044)
ժҪ�����ڸĽ����˶�ѧ�����������ϲ��������������˫Բ�����ֳ��������������̺��������Ϸ��̣���������۹����������Լ����ֳ����������ۺϿ�����ʵ����ֲڶȡ��غɡ��ֳݼ��νӴ��������ٶȵȣ�����˫Բ������г������������������ڹ�����������Ļ������ѧģ�͡�������������ͬ������������г������װ�������ܵ�Ӱ�졣�о������������������ֳ�����ʱ��������Բ�������İ뾶�����ڸ��ƽӴ�������״̬���ڹ��������������ر������и��ٵĹ����£��Ӵ�����Բ�������뾶�������ӽӴ�����Ĥ��ȣ�����Ĥ��ȣ��Ҹ��Ƶ�Ч������ת�ٵ����Ӷ������������뾶���ܽӽ��������뾶ʱ���������Ӽ�����������������
�ؼ��ʣ�˫Բ���������������������Ż�����
��ͼ����ţ�TH132.43 ���ױ�־�룺A ���±�ţ�1672-7207(2018)10-2454-08
Influence of convex tooth radius of flexspline on tribology of double circular arc harmonic gear transmission
PEI Xin1, ZHOU Guangwu1, WANG Jiaxu1, 2, YANG Yong1, ZHANG Zhenhua1, HU Rukang1
(1. School of Aeronautics and Astronautics, Sichuan University, Chengdu 610065, China;
2. State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China)
Abstract: By using the meshing invariant matrix to establish the parameter equation and theoretical meshing equation, the theoretical conjugate meshing region and the circular-spine-tooth profile parameters could be worked out based on improved kinematics. Taking into account the real surface roughness, load, geometric contact teeth, the suction speed, a mixed lubrication mathematical model of flex-spline and soft-spline in meshing area of double circular arc tooth profile harmonic reducer was established. The influence of different tooth profile parameters on the lubrication performance of the harmonic transmission was analyzed. The results show that in the design of soft-spline tooth profile, reasonable increase of the radius of convex arc tooth profile is conducive to the improvement of the contact area lubrication state. Under constant conditions, especially high-speed conditions, increasing the radius of the convex circular arc tooth profile can the film thickness of the contact zone and increase the film thickness ratio, and the improvement effect increases with the increase of the rotational speed. However, when the radius of the convex tooth is increased to be very close to the radius of the crown, the continued increase does not improve the lubrication conditions.
Key words: double arc tooth profile; tooth profile parameters; lubrication; optimization
г�����ִ���װ�þ��д����ȴ������ȸߡ�����ͨ���ܷ�ڴ����˶�����������¹������ܺá��ز�С���ص㣬ʹ�����ں��պ��졢�����ˡ�ԭ�ӷ�Ӧ�ѵ�����õ��˹㷺��Ӧ�á�Ȼ������г�����ִ���װ�õ�ʧЧ�У���Ϊ����������ֳݽӴ�ʧЧ����ĥ�����ơ���ʴ�����ȵȣ���ˣ���˫Բ��г�����ִ���װ���ֳݽӴ�����������Խ����о����������г�����������ܾ���ʮ����Ҫ�Ĺ��̼�ֵ�����ڹ㷺Ӧ�õ�˫Բ����������ISHIKAWA[1]��������ר��������ISHIKAWA[2]�������е����ֳ����Ͻ����˸Ľ����������[3]�����˸Ľ����˶�ѧ�����˹�������������̣���������˫Բ��г�����ִ������ֺ��ֻ�����������ƹ��̡���������[4]ָ������ʵ����˫Բ�����ֵ���Ĥ�γ������Ƚ������ͳ��ֺã������ö�Ԫ�ع�ķ�����������ijһ�ͺ�˫Բ��������СĤ������Ĥ��ľ�����㹫ʽ��ZHU��[5]��������ʵ����Ӵ�����������˹�����ʵ������״�����ֲڶȽӴ��������߽Ӵ������ģ�ͽ���������Ϊ������ĸ��ӽӴ������ṩ���ֶΡ����µ�[6]���ڸĽ����˶�ѧ��������С�����������������������ĽǶȣ������һ�֡�˫����ij����Ż��������������ھ���г�������IJ����϶࣬�����㡰˫���������£�����������Ȼ���㹻���Ż��ռ䡣���ǿ��[7]�Աȷ����˽���������˫Բ������г�����ִ��������������������ܣ�ָ��˫Բ������������Ĥ��ȣ�ѹ����������Ը��ƣ���û�ж�˫Բ�����������������Ч����Ӱ��������������Ŀǰ����˫Բ�����ִ���װ�û���������о����٣���ˣ�����������Թ�����˫Բ������г�����ִ���װ�ã����ڸĽ����˶�ѧԭ�����������ϲ��������������˫Բ�����ֳ��������������̺��������Ϸ��̣�������۹����������Լ����ֳ���������������ϵķ����õ����ֳ����Ľ������ʣ�����Щ�����ϣ������ۺϿ�����ʵ����ֲڶȡ��غɡ��ֳݼ��νӴ��������ٶȵ����ص�г����������-�����ֳ�������������ģ�ͣ�̽�ֲ�ͬ���������������κ�ĸ��ֶ������ܵ�Ӱ�죬�������г�����������ܾ���ʮ����Ҫ�Ĺ������塣
1 ˫Բ��г�����ִ���ԭ��
1.1 ���ֳ���ģ��
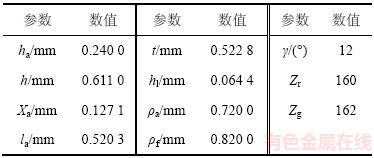
�����е�г������ʹ�ù�����ʽ˫Բ����������������Ҫ��Բ����ֱ�߶ι��ɣ���ͼ1��ʾ�����У�haΪ�ݶ��ߣ�hfΪ�ݸ��ߣ�hΪȫ�ݸߣ���aΪԲ�������뾶����fΪ��Բ�������뾶��hlΪ���������ȣ���Ϊ��������ǣ�tΪ�ݸ�Բ�����Բ���룻XaΪ��Բ���ƾ�����laΪ��Բ��ƫ������XfΪ����Բ���ƾ�����lfΪ����Բ��ƫ������
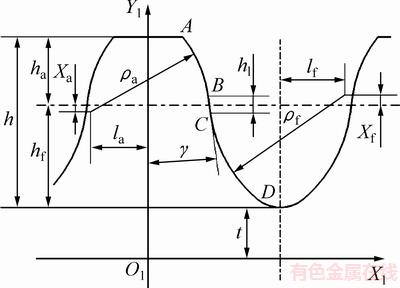
ͼ1 ˫Բ���ݵij��νṹ
Fig. 1 Tooth structure of double circular arc teeth
����ͼ1�г����ķֶ������������߷��̵�������ʽ���¡�
AB��ΪԲ��������
 (1)
(1)
ʽ�У� ��
�� ��
�� ��
�� ��
��
BC��Ϊһ��ֱ�ߣ�
 (2)
(2)
ʽ�У� ��
�� ��
�� ��
��
CD��Ϊ��Բ��������
 (3)
(3)
ʽ�У� ��
��
 ��
�� ��
��
ʽ(1)Ϊ�ݶ�Բ��AB�ε����߷��̣�ʽ(2)Ϊ���ӳݶ��ͳݸ�Բ����ֱ��BC�ε����߷��̣�ʽ(3)Ϊ�ݸ�Բ��CD�ε����߷��̡�������˫Բ�������Ļ��������Ǹ��ݹ�����˫Բ������������15023��69ȷ���ġ�������г������ģ��Ϊ0.396 mm�����ݳ������νṹͼ���Կ�����г���ij��β�������������6������ȷ����Բ��Բ�����ꡢ��Բ��Բ�����ꡢԲ���뾶��a����Բ���뾶��f�����������Ⱥ�������ǡ�
1.2 ��������ϵ��r����Ľ���
��������ֵ�����˶�������ͼ2��ʾ������ϵ�����
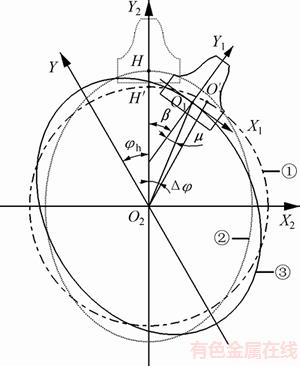
ͼ2 г�����ִ�������ϵ[6]
Fig. 2 Harmonic gear drive coordinates[6]
��������˶����Լٶ����ֲ���������������ת�Ӷ���������ת����������ϵ��Ϊ1��ȫ������ϵ��1���ֲ�����ϵ����������ϵS2Ϊ����ֹ�������ֹ������S1�������ֳݹ������沨������ת��������г�����ִ������˶���ϵ[8]��
 ��
�� ��
��
���ڸĽ����˶�ѧ��[9]���Խ������ϲ���B����
 (4)
(4)
����B��������ϲ������ԣ���г�����ֳ�����3�γ�������ͳһ�����ϻ���������[10]��
 (5)
(5)
�����ֳ���������Ϊ��֪������������������������ѡ����Բ�ֲ�����������1��ʾΪ��ʼ���ֳ���������
��1 ���ֳ�������
Table 1 Profile data of flexspline
ͼ3��ͼ4��ʾ�ֱ�Ϊ���ֳ����������������ϽǶȣ����ֳ������ε����۹��������
ͼ4��ͼ5�У��߶�a��bΪ����AB�����۹������ߣ�c��dΪ����BC�����۹������ߣ�e��fΪCD�����۹������ߡ����Կ��������ֵij����а����������d��e��f��������������������ת��ʱ�����������ϻ������b���ϣ��Ӷ��������档��ˣ�ʵ�ʷ������������Ϊa��b��c 3�����������µ�[6]����ij��������Ż��㷨���������ֲ�����ʹ��b��e2���������������С����ʹ��������ֵ�1�������У����ֵ���������ֵİ����������ֵİ���������ֵ�����ͬʱ��������(˫����)��
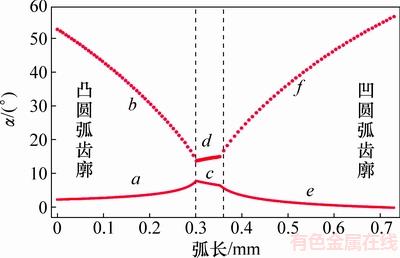
ͼ3 ���ֹ������ϽǶ�
Fig. 3 Flexspline conjugate meshing angel
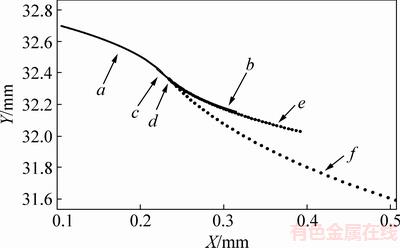
ͼ4 ���ֳ������۹������
Fig. 4 Theory conjugate tooth profile of flexspline
2 �����ģ��
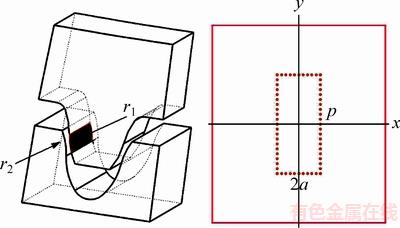
г�����ִ���װ�������������Ϊ�����߽� ��[11-12]��������������ֵ����Ͼ��������ԣ���Ȼͬһʱ�̲�ͬ���ϵ������ٶ����������ͬ��������������Ȧ�ϣ����гݶԵ��˶������Dz����ظ��ġ���ˣ������ֵ��������Լ�Ϊ������ijһ�ݶԵ�����������з��������ֻ�������ֹ���������Ͽ��Լ�Ϊ2��Բ����Ӵ�����ģ����ͼ5��ʾ��ͼ�У�r1Ϊ�������ϵ����ʰ뾶��r2Ϊ�������ϵ����ʰ뾶��aΪ���ȽӴ������dΪ�Ӵ����ȡ�
ͼ5 ����-���ֽӴ�����ģ��
Fig. 5 Flexspline-circular spline contact geometry model
���ȽӴ�������غɸ�������[13-14]�������������������ı���Э�����̼���������ƽ�ⷽ�̼���ó����������������뾶�����ļ��㹫ʽ���£�
 (6)
(6)
 (7)
(7)
ʽ�У�TΪ���Ť�أ�dgΪ�ֶ�Բֱ������2Ϊ40�㣻��1Ϊ���ϵ�����ڲ�����������ĽǶ�λ�á�
2.1 ����������
����������Ը��������˶�����Ϊx������������ƽ��Ϊ{x��o��y}����ϵ���������������[15]��
Reynolds����Ϊ
 (8)
(8)
������ʵ����ֲڶȵ���Ĥ��ȷ���Ϊ
 (9)
(9)
ʽ�У���1�ͦ�2�ֱ�Ϊ���Ӵ�����ȽӴ�������ʵ����ֲڶȣ�Ve(x��y��t)Ϊ���浯�Ա��Ρ�
 (10)
(10)
���͵���Ϊ
 (11)
(11)
���͵��ܶȷ���Ϊ
 (12)
(12)
ϵͳƽ�ⷽ��Ϊ
 (13)
(13)
2.2 �Ӵ������˶�ѧ��ϵ
ͼ6��ʾΪ����-���ֽӴ��������ϵ���ٶ�ʾ��ͼ��ͼ6�У���Ϊ����˽��ٶȣ�vekΪ�������ϵ�ǣ���ٶȣ�vrkΪ�������ϵ㾶������ٶȣ�vtkΪ�������ϵ���������ٶȡ�
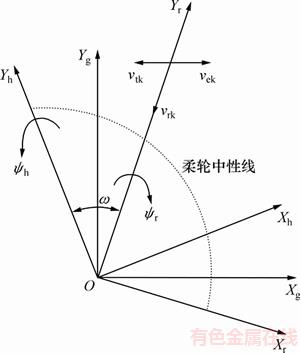
ͼ6 ����-��������ʾ��ͼ
Fig. 6 Flexspline-circular spline meshing schematic
������ת�٦�һ��������£����ȽӴ����������˶��ٶ�Ϊv=vek+vrk+vtk��������ʱ��ʹ�õ���Ի����ٶȼ�Ϊ������˶��ٶ����ų�����������������
ͨ�����ֳ�����������õ����ֵij�������ɢ�㡣ͨ����ϵķ���[16]��������������ư뾶��1�밼�������ư뾶��2��
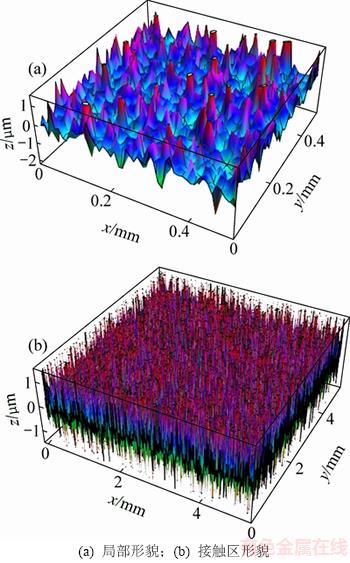
ͼ7 ���ֳ�����ò
Fig. 7 Tooth surface morphology of flexspline
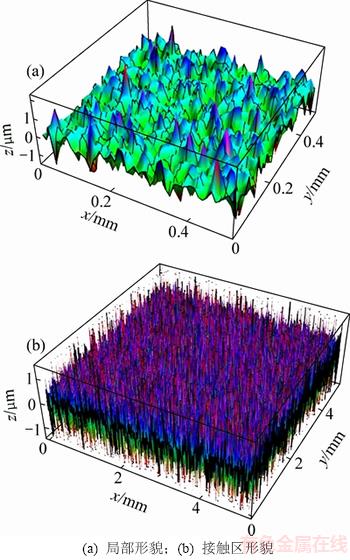
ͼ8 ���ֳ�����ò
Fig. 8 Tooth surface morphology of circular spine
���ִ��������д���2�ι�������
��1�ι�����ֳݶ�����������Ӵ���
r1=��a��r2=��1
��2�ι�����ֳݶ�����ְ������Ӵ���
r1=��a��r2=��2
2.3 �Ӵ�������ʵ��òģ��
Ϊ�˽������DZ���ֲڶȵ���Ĥ��ȷ�����Ҫ�Ƚ�����ʵ����ֲڶ�ģ�͡�
��ͳ�Ĵֲڶ�ģ��ͨ��ʹ�ü��������ķ�ʽ��ģ�����������[17]���ڿ��ٸ���Ҷ�任ģ��������ά�Ǹ�˹�ֲڱ��档�������ù�ѧ�����Dz��ͬ���ͺ�г����������������ֱ�����ʵ��ò����ȡ��ɢ������㡣��ѧ��������Ұ����Ϊ5.12 mm��5.12 mm���������ֱ���������ֲڶ�Ϊ0.353 5 ��m�����ֱ���������ֲڶ�Ϊ0.362 7 ��m��
2.4 ��ֵ����
����ʽ(1)~(5)���㲢ѡȡ���ʵĸ��ֳ�������Mathematica����ϳ����ֽ��Ƴ��������ʰ뾶��1�ͦ�2�������Ա��η��̡����͵���ѹ�����̡����͵��ܶ�ѹ��������Reynold���̺ϲ�Ϊ1�������飬����ʹ�ø��ϵ��������[18]��Ϊ������Ч��[19-20]��ʹ�ÿ��ٸ���Ҷ�㷨����Ӵ��������ĵ��Ա��Σ�����Gauss-Siedel���������ظ�����ѹ���ֲ���Ĥ��͵��Ա���ֱ������ѹ�����غɵ��������ȡ�Ϊ��֤�����ȷ�ԣ�������������Ϊ1��10-5��
 (14)
(14)
3 �������������
3.1 �����������
���ݽ����Ļ����ģ�ͣ��Բ�ͬ���������ij������Ͻ��з�������������������������£������ת��Ϊ3 000 r/min������ת��T=90 N��m���ݿ�Ϊ9 mm�������������2��ʾ��
���Ļ����������£���ʼ��Ϊ0.093 Pa��s,�ѹϵ��Ϊ1.82 GPa-1��
��2 �Ӵ�ģ�Ͳ��ϲ���
Table 2 Material parameters of contact model
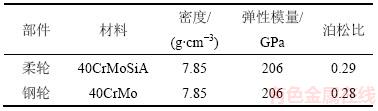
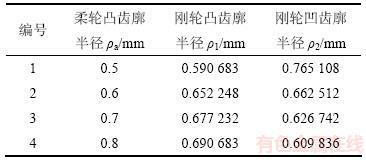
��������ӹ������⣬���ֳ�����Բ�������뾶ͨ��С�ڰ�����Բ���뾶����3��ʾΪ�������ְ�Բ�������뾶���䣬����Բ�����������������߽ǶȺͳ��Ȳ���ʹ�������b��e�غϣ��õ��Ĺ���������ʰ뾶����3�Ц�1Ϊ����������ϰ뾶����2Ϊ��������ϰ뾶��
��3 �Ӵ��������ʰ뾶
Table 3 Fitted radius of curvature on contact area
3.2 ��ͬ���ʳ������ķ���
������ʵ�ʵĹ���Ӧ���У��������Ĺ���ת��ͨ����ת�ٲ�ͬ���Բ�ͬ����ת���µij����Ӵ���Ĥ��ȡ��Ӵ��غɱ��Լ�Ħ���������з�������ʮ����Ҫ�����塣
3.2.1 ��ͬת�������ʰ뾶��Ĥ��ȵ�Ӱ��
������������-����������1�ι���Ӵ���Ϊa����������-���ְ�������2�ι���Ӵ���Ϊb��ͼ9��ͼ10��ʾ�ֱ�Ϊa��b�Ӵ���Ĥ������Ų�����������ת�ٱ仯�����ߡ���ͼ9��ͼ10���Կ���Ĥ��Ⱦ����Ų�����������ת�ٵ����Ӳ�������
��ͼ9��ͼ10�����Կ������ڵ���������Ч���ϲ������������Ч��Ӱ���С�����������뾶�������ƽӴ����������������������ת��Ϊ200 r/minʱ�������뾶��0.5 mm���ӵ�0.7 mm���Ӵ���a��Ĥ�����0.011���ӵ�0.025����Ȼ���������ӣ�������ֵ��Ȼƫ�ͣ���ʱ��Ҫ�ԸɽӴ�Ϊ����ת�ٶ�����Ч����Ӱ������ڸ�ת���£���ߴ��������������Ч����Ӵ�����Ĥ��ȡ��ڶ3 000 r/min��ת���£�����������ư뾶Ϊ0.7 mm��0.5 mmʱ����ߡ�-���Ӵ�ʱ��Ĥ���0.06����ߡ�-�����Ӵ���Ĥ���0.052���������Ŧ�a�������Ƶ�Ч��Ҳ����֮���ͣ���Ȼ0.7 mm�����0.5 mmʱ����Ч���ӽӴ������Ĥ��ȣ������ӵ������ڱ仺��ת��Ϊ1 200 r/minʱ����a��0.7 mm���ӵ�0.8 mm����-���Ӵ�ʱ��Ĥ����н�С����(Լ0.03)�����ǵ�ת�����ӵ�2 000 r/min����ʱ3����4�ŵ�Ĥ��ȼ�����ͬ��
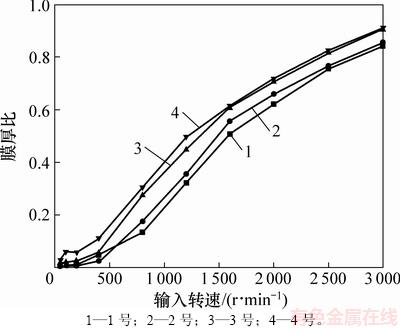
ͼ9 �Ӵ���aĤ���
Fig. 9 Film thickness ratio of contact area a
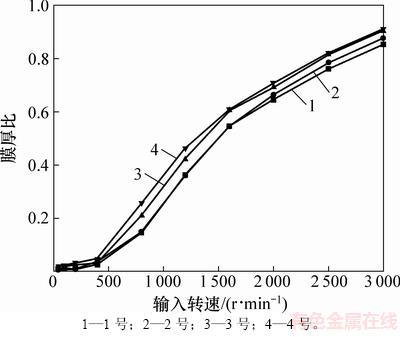
ͼ10 �Ӵ���bĤ���
Fig. 10 Film thickness ratio of contact area b
3.2.2 ��ͬת�������ʰ뾶�ԽӴ��غɱȵ�Ӱ��
ͼ11��ͼ12��ʾ�ֱ�Ϊ��������-������������������-���ְ������Ӵ�����Ӵ��غɱ����Ų�����������ת�ٱ仯�����ߡ���ͼ11��ͼ12���Կ�����2���Ӵ�������������Ƶ����ߣ��Ӵ��غɱȾ�����ת�ٵ����Ӷ���С���ڽӴ���a�У��������������뾶������Ч����ͬת���½Ӵ����ĽӴ��غɱȣ��Ӵ�����a�У���1 600 r/minת���£�Բ�������뾶��0.5 mm���ӵ�0.7 mm���Ӵ��غɱ���10.94%���ٵ�6.68%����0.7 mm���ӵ�0.8 mmʱ���Ӵ��غɱ���6.68%���͵�6.03%����3 000 r/minʱ�������뾶Ϊ0.7 mm��0.5 mmʱ�ĽӴ��غɱ�����С(0.8%)��˵�������������ʰ뾶�����ӣ��Ӵ����ĽӴ��غɱ��ڽ��͵����������ڱ仺����ת��Ϊ200~2 000 r/min֮�䣬���������뾶���ڸ��ƽӴ��غɱ������Ե�Ч����
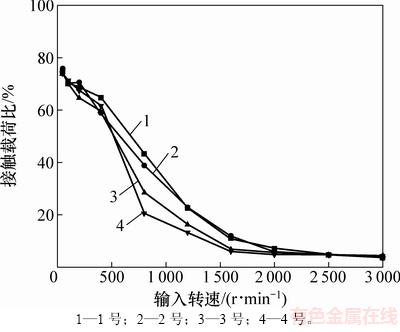
ͼ11 �Ӵ���a�Ӵ��غɱ�
Fig. 11 Contact load ratio of contact area a
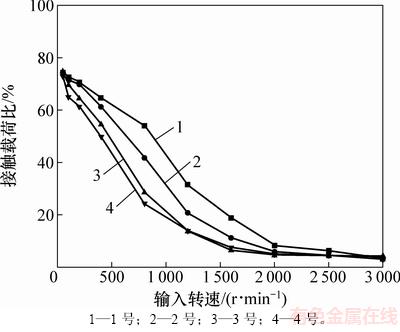
ͼ12 �Ӵ���b�Ӵ��غɱ�
Fig. 12 Contact load ratio of contact area b
3.2.3 ��ͬת�������ʰ뾶��Ħ��ϵ����Ӱ��
ͼ13��ͼ14��ʾ�ֱ�Ϊ��������-������������������-���ְ������Ӵ�����Ħ���������Ų�����������ת�ٱ仯�����ߡ���ͼ13��ͼ14���Կ�����Ħ����������ת�ٵ����ӳ��ֳ���С�����ƣ�������500 r/min���ڣ�����ת�ٵ����ӣ�Ħ������Ѹ�ټ�С����ת�����ӵ�1 000 r/min����ʱ������ת�����ӣ�Ħ��������С�����Ʊ仺��4��������2 500 r/min����ת�ٵ�Ħ������������ͬ���ڲ�����������ת��Ϊ800~2 000 r/minʱ����ͼ�е�4�������ڿռ��ϼ������ֳ����ϵ���1��2��3��4�����У�˵���ڴ�ת�����䣬������������뾶������Ч���ٽӴ���a��b��Ħ��������
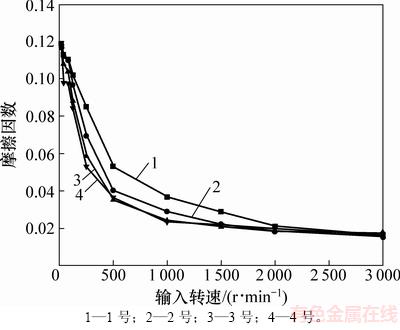
ͼ13 �Ӵ���aĦ������
Fig. 13 Friction coefficient of contact area a
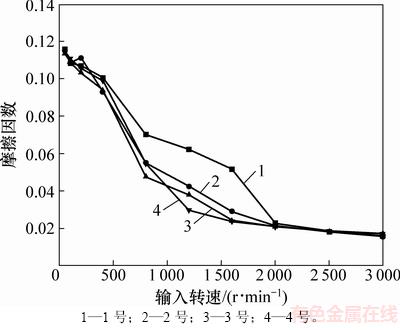
ͼ14 �Ӵ���bĦ������
Fig. 14 Friction coefficient of contact area b
4 ����
1) ����������ֵ�������Ҫ��Ϊ2������-���Ӵ��롰-�����Ӵ������Ų�����������ת�ٵ����ӣ��������ϵ��ƽ����Ĥ��Ȳ������ӣ��ı�����������и����µ���״̬�нϴ��Ӱ�졣
2) ���и���ͬһ�����£��������ְ������������䣬���������뾶��2���Ӵ�������Ч�����Եõ�������ߡ��������������뾶�����ְ������뾶�Ľӽ�������Ч�����͡��Ҹ��Ƶ�Ч������ת���������ԡ�
3) �ڵ���ͬһ�����£��������ϲ��ʱ�ٶȶ���Ч����Ӱ��ϴ����Ӳ�����������ת�٣���������Ч�����Եõ������������������ְ������������䣬���������뾶������������״̬��
�ο����ף�
[1] ISHIKAWA S. Tooth profile of spline of strain wave gearing: US, US 4823638 A[P]. 1989-04-25.
[2] ISHIKAWA S. Tertiary negative-deviation flexing contact type gear drive of non-profile-shifted tooth profile: US, US5485766[P]. 1996-10-17.
[3] �����. ˫Բ��г�����ִ��������������[J]. �й���е����, 2011, 22(6): 656-662.
XIN Hongbing. The design of the basic tooth profile of double arc harmonic gear drive[J]. Chinese Mechanical Engineering, 2011, 22(6): 656-662.
[4] ���г�, ��ʫ��. ˫Բ�����ֵ������о�[J]. ��е���, 1992, 9(6): 39-43.
ZHANG Youchen, WEN Shizhu. Double circular arc gear elastohydrodynamic lubrication of double arc gears[J]. Mechanical Design, 1992, 9(6): 39-43.
[5] ZHU Dong, WANG Jiaxu, REN Ning, et al. Mixed elastohydrodynamic lubrication in finite roller contacts involving realistic geometry and surface roughness[J]. Journal of Tribology, 2012, 134(1): 011504.
[6] ����, ������, ���, ��. ˫Բ��г�����ִ������ֳ����������Ż����[J]. �Ĵ���ѧѧ��(���̿�ѧ��), 2016, 48(1): 186-193.
YANG Yong, WANG Jiaxu, ZHOU Qinghua, et al. Optimum design of flexible gear profile parameters of double arc harmonic drive[J]. Journal of Sichuan University (Engineering Science), 2016, 48(1): 186-193.
[7] ���ǿ, ������, ��ΰ, ��. ������״��г�����ֹ������������Ե�Ӱ��[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2017, 45(4): 29-33.
WU Jiqiang, WANG Jiaxu, PU Wei, et al. Influence of profile shape on Lubricity of harmonic gear meshing[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(4): 29-33.
[8] FOL GA P, GRZEGORZ WOJNAR, RAFAL BURDZIK, et al. 1401. Dynamic model of a harmonic drive in a toothed gear transmission system[J]. Journal of Vibroengineering, 2014, 16(6): 3096-3104.
GA P, GRZEGORZ WOJNAR, RAFAL BURDZIK, et al. 1401. Dynamic model of a harmonic drive in a toothed gear transmission system[J]. Journal of Vibroengineering, 2014, 16(6): 3096-3104.
[9] ������. г�����ִ��������ۺ����[M]. ����: ��е��ҵ������, 1985: 51-56.
SHEN Yunwen. Theory and design of harmonic gear drive[M]. Beijing: Mechanical Industry Press, 1985: 51-56.
[10] ����ǿ, ��Ҿ�, ������. ˫Բ������г�����ִ������˶����Է���[J]. ���пƼ���ѧѧ��(��Ȼ��ѧ��), 2000, 28(1): 12-14.
ZENG Shiqiang, YANG Jiajun, WANG Xuanfu. Analysis of kinematic characteristics of double arc gear harmonic drive[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2000, 28(1): 12-14.
[11] ��ΰ, ������, ���, ��. �������ζ��˲������������ܵ�Ӱ�����[J]. Ħ��ѧѧ��, 2014, 34(4): 393-399.
PU Wei, WANG Jiaxu, LI Junyang, et al. Analysis of the influence of tooth alignment on the lubrication performance of a filter reducer[J]. Journal of Tribology, 2014, 34(4): 393-399.
[12] HARRIS T A, KOTZALAS M N. Essential concepts of bearing technology[M]. 5th ed. Boca Raton: Crc Press, 2006: 55-59.
[13] ��, ����, ÷ѩ��, ��. �����˹ؽڶ�Ͳг���������Ӵ����������[J]. ������ͨ��ѧѧ��, 2013, 47(5): 82-87.
ZOU Chuang, TAO Tao, MEI Xuesong, et al. Contact calculation and analysis of harmonic reducer for robot joint[J]. Journal of Xi��an Jiaotong University, 2013, 47(5): 82-87.
[14] ��ٚ, ���پ�, ����. ������ЧӦ��ֱ���ֵĽӴ�ƣ������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(12): 4187-4193.
HU Jie, LIU Shaojun, DING Sheng. Contact fatigue life of spur gear under elastohydrodynamic lubrication[J]. Journal of Central South University(Science and Technology), 2014, 45(12): 4187-4193.
[15] HU Yuanzhong, ZHU Dong. A full numerical solution to the mixed lubrication in point contacts[J]. Journal of Tribology, 2000, 122(1): 1-9.
[16] ������, ��Դ��, �½�. ��С���˷��͵�����Բ�������[J]. ����ѧ, 2016, 41(1): 194-197.
CHEN Mingjing, FANG Yuanmin, CHEN Jie. The least squares method and iterative method of circular curve fitting[J]. science of Surveying and mapping, 2016, 41(1): 194-197.
[17] ������, ������. ���ڿ��ٸ���Ҷ�任����ά�Ǹ�˹�ֲڱ�����ֵ����[J]. �й��Ƽ�����, 2014, 9(8): 908-910.
ZHANG Shengguang, WANG Wenzhong. Numerical simulation of 3D non Gauss rough surface based on fast Fourier transform[J]. Chinese Science and Technology Paper, 2014, 9(8): 908-910.
[18] AI Xiaolan. Numerical analyses of elastohydrodynamically lubricated line and point contacts with rough surfaces by using semi-system and multigrid methods (volumes 1 and 2)[M]. Evanston: Northwestern University, 1993: 22-47.
[19] LIU Shuangbiao, WANG Qian. Studying contact stress fields caused by surface tractions with a discrete convolution and fast Fourier transform algorithm[J]. Journal of Tribology, 2002, 124(1): 36-45.
[20] WANG W Z, WANG H, LIU Y C, et al. A comparative study of the methods for calculation of surface elastic deformation[J]. Journal of Engineering Tribology, 2003, 217(2): 145-154.
(�༭ ����ƽ)
�ո����ڣ�2017-10-08�������ڣ�2017-12-02
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2015AA043001)(Project(2015AA043001) supported by the National High-tech Research and Development Program (863 Program) of China)
ͨ�����ߣ��ܹ��䣬��ʿ�������ڣ����»�е�����о���E-mail��gwzhou@scu.edu.cn

