DOI: 10.11817/j.ysxb.1004.0609.2020-39521
��������ˮƽ���۹ܵ���ͬ�����µ���ά����������
�� ��1, 2�����ƽ1, 2���ձ���1, 2
(1. �����Ƽ���ѧ ��ľ����Դ����ѧԺ������ 100083��
2. �����Ƽ���ѧ ������ɽ��Ч�����밲ȫ�������ص�ʵ���ң����� 100083)
ժ Ҫ�������·ĩ��ˮƽ�ܶε��Ἣ���Ӱ�����Ч���ͳ���Ч�ʣ������һ���⣬Ϊ̽���ܵ���״̬����ڸ���ƽ�����ٱ仯�Ĺ��ɣ�����ֳ�ʵ�ʣ������ܵ�����ģ�ͣ�������ˮƽ���ܶε���ά���������Ʒ����顣����٤�ɽ�Runge-Kutta��������ֵ��⣬�õ������ܵ����ɶ˵Ķ���ѧ��Ӧ����ͨ��ʱ������ͼ���ֲ�ͼ����ƽ��ͼ���˶��켣ͼ���г��֡�������������ڸ�������������uf������Ĺ����д���һ���ٽ�����ucr�������������ϵ��ٽ����ٲ�ͬ����1������ucr=10.55����2������ucr=0.001����uf��ucrʱ���ܵ����ջ��ȶ���������uf��ucr���ܵ����ɶ˻ᷢ������ʧ�ȣ����˶���ʽ����Ϊ������������������uf�����ܵ�������Ҳ�������
�ؼ��ʣ��������ͣ��ܵ���ά�������ԣ�ƽ������
���±�ţ�1004-0609(2020)-10-2492-11���� ��ͼ����ţ�TD853��TB533���� ���ױ�־�룺A
���Ź��ҶԿ�ҵ���ɰ�ȫ�Ժͻ����Ե����ӣ������������㷺Ӧ���ڿ�ɽ�����У����ڱ�֤��ɽ��ȫ����������Ч�����ȷ��涼��ʾ��������ƣ���Ϊ���¿�ҵ���ɲ��õ���Ҫ��ɫ���ɼ���[1-2]���ܵ�������Ϊ�������յ���Ҫ���ڣ�һ���̶��Ͼ����Ÿ�����������Ч��[2]���������͵Ĺ��̿ɷ�Ϊ��ֱ���ͶΡ�ˮƽ���ͶΡ�����ɳ����������֣�����ֱ���Ͷμ�������ӵ�ˮƽ���Ͷ��У��ܵ������Թ̶������̶ֹ���ʽʹ�����ܵ�ϵͳ�ĸ��Էdz��������ơ������ǰ�������ܶΣ������ɳ��ܶ�Ϊ��֤������ԣ��Թܵ��̶���Ϊ���ɣ��ܵ�����Ϊǿ�ң����¸����ͳ��ܵ�ʱ�������ȣ�Ӱ���˳�����ҵ�ĸ�Ч�ԣ��Գ���Ч�������˸������ã���һ�����͵������ܵ�ϵͳ�����������ܵ�ϵͳ�Ķ���ѧ��Ϊ��20����80�������һֱ�ǹ�����ѧ���о����ȵ����⣬���ں˵�վ�����պ��졢����ɿ̵����������Ҫ�о�����[3-8]������Һ�ܵĶ���ѧ��Ϊ�о��У�����1966�꣬GREGORY��[4-5]�Ͷ����������ܵ�ʧ�ȷ�ʽ�������о����ó����۹ܵ�ʧ�ȷ�ʽΪ����ʧ����һ��Ҫ���ۣ������ڲ�����ǰ�����ܻ���ַ�ɢʧ�ȡ�֮����һ������о��ɹ�����ӿ ����1974��PAIDOUSSIS��[6]�����˱Ƚ������Ķ�ά�������Ʒ��̣�������ģ�Ͳ��������������������ܵ��Ķ���ѧ��Ϊ���о���Ա��ʼ��ע�����ܵ��ķ����Զ���ѧ��Ϊ�����������������������ȡ�PAIDOUSSIS��[7]����٤�ɽ�ƽ������ֱ��Һ�ܵ��ڷ�����Լ���µĶ���ѧ��Ϊ�������������٤�ɽ�ضϽ���N��2�仯��4ʱ����ֵ���ʵ�����ķ��ϳ̶ȴ����ñ�����㡣�����[8]����ֵ��;�ȷ������˶Աȣ��ܽ���ģ̬�ض������������������� ��ϵͳ�ٽ����ٵ�Ӱ��̶ȣ������������N=2��=0.2ʱ�Ϳ��Եõ���Ծ�ȷ����ֵ�⡣��������[9]Ҳ��ƽ���ڷ�����Լ���¹ܵ��Ļ�����Ϊ�������о��������о��������ڶ�άƽ�����ڡ�WADHAM-GAGNON��[10]�ܽ���ǰ�˵��о��ɹ����Ƶ�����ֱ���۹ܵ����������м䵯��֧�š�ĩ�˸������������µ������Ŀ��Ʒ��̣������䶯��ѧ��Ϊ���������۷������ڴ˻����ϣ�GHAYESH��[11]������һ���������������˽�һ���Ķ���ѧ����������ϸ�ضԱ�����ֵ�������в�ͬ��ʼ�����µĽ����������ͬ�ij�ʼ�����¹ܵ��Ķ���ѧ��Ϊ�ᷢ���仯��
��ϵͳ�ٽ����ٵ�Ӱ��̶ȣ������������N=2��=0.2ʱ�Ϳ��Եõ���Ծ�ȷ����ֵ�⡣��������[9]Ҳ��ƽ���ڷ�����Լ���¹ܵ��Ļ�����Ϊ�������о��������о��������ڶ�άƽ�����ڡ�WADHAM-GAGNON��[10]�ܽ���ǰ�˵��о��ɹ����Ƶ�����ֱ���۹ܵ����������м䵯��֧�š�ĩ�˸������������µ������Ŀ��Ʒ��̣������䶯��ѧ��Ϊ���������۷������ڴ˻����ϣ�GHAYESH��[11]������һ���������������˽�һ���Ķ���ѧ����������ϸ�ضԱ�����ֵ�������в�ͬ��ʼ�����µĽ����������ͬ�ij�ʼ�����¹ܵ��Ķ���ѧ��Ϊ�ᷢ���仯��
�������ܵ�ϵͳ�У�����������Ӱ��ܵ���һ����Ҫ���ء������Ƕ�߶�ɢ�������ˮ���϶��ɵ�����ˮ������״�ṹ���壬���ڷ�ţ�������һ������[12]�������Ͻ��ڹܵ������е��˶������ǹ�����ѧ���о����ص����⣬���Բ���2������Bingham����ģ��ģ��ܵ�������ϸ�����ٶȷֲ����ɡ����������ɷ�Ϊ�����������������������������������������������ȣ��������������������عܾ���������[13-14]���Ⱞ���[12]�ڴ˻����Ͽ��DZ��⻬�Ƶ�Ӱ�죬�����˻��������������������������������Сʱ���ٶȷֲ�����������[13-14]�õ��Ĺ�����һ�¡�
������Ը����������������µ���ɳ�ˮƽ����·ĩ��ˮƽ�ܵ���������ѧ��ģ����ֵ��⣬��������Ļ����϶Թܵ�����ĩ�˽��ж���ѧ�����������о����ڸ���ƽ�����ٶԹܵ�����Ӱ�죬̽��������ܵ��ڲ�ͬƽ�������µ���״̬��Ϊ��ɽ�������������ṩ���ۻ�����
1 ��ѧ��ģ
1.1 ��������
��Լ����������ˮƽ���۹ܵ��IJ��������ͼ1��ʾ����˶����ܵ���ΪL���ܵ�����ΪӲ��PVC���ܵ����ھ�ΪDin���⾶ΪDout���ܵ��Ŀ���ն�ΪEI���ܶ�Ϊ ����λ���ȹܵ�����Ϊm��P0Ϊ��̬״̬�¹ܵ��е�һ�㣻PΪ�ܵ��˶����Ӧ��P0�㡣���ǵ��ֳ��ܵ��ij����Ƚϴܵ��������б��ֳ��ķ����Զ���ѧ��Ϊ��������Euler-Bernoulli��ģ�ͣ����ֳ�ˮƽ�ܵ���ڴ���ǰ�ιܵ������������Ȧí�̣�ĩ�����ɣ��ڴ��ֱ߽������£��ڷ����н���������ˮƽ�ܵ�����Euler�CBernoulli������ģ�ʹ�����ͬʱ�������м�Լ����Ӱ�죬��Ϊ�ܵ��������ϲ���ѹ����
����λ���ȹܵ�����Ϊm��P0Ϊ��̬״̬�¹ܵ��е�һ�㣻PΪ�ܵ��˶����Ӧ��P0�㡣���ǵ��ֳ��ܵ��ij����Ƚϴܵ��������б��ֳ��ķ����Զ���ѧ��Ϊ��������Euler-Bernoulli��ģ�ͣ����ֳ�ˮƽ�ܵ���ڴ���ǰ�ιܵ������������Ȧí�̣�ĩ�����ɣ��ڴ��ֱ߽������£��ڷ����н���������ˮƽ�ܵ�����Euler�CBernoulli������ģ�ʹ�����ͬʱ�������м�Լ����Ӱ�죬��Ϊ�ܵ��������ϲ���ѹ����
������һ�ֽṹ����[12, 14]�����ܶ�Ϊ ����λ������������ΪM�����⣬�����������͵����Σ������Ǵ˶ι��ڸ����ٶȲ����������ǹ��ڶ����������滬�Ƶȸ��������Ӱ�졣���ڹܵ���������ƽ��ԭ�������ܵ���ڴ��ͳ��ڴ�������˶��ٶ�����ͬ�ģ�ѹ���Ը��������������ܱڵ�Ħ�����õ�������ˣ��ڴ˶�ˮƽ������Ĺܵ������У�������ˮƽ�ܵ��ڸ����ٶȵĸ���״̬�����������к㶨����U������֮�⣬�������¼��裺�ٹܵ����κ�С�����ܵ�λ�Ʋ������ƣ��ں��Թܵ�����ת���Ժͼ��б��Σ��۸��岻��ѹ����
����λ������������ΪM�����⣬�����������͵����Σ������Ǵ˶ι��ڸ����ٶȲ����������ǹ��ڶ����������滬�Ƶȸ��������Ӱ�졣���ڹܵ���������ƽ��ԭ�������ܵ���ڴ��ͳ��ڴ�������˶��ٶ�����ͬ�ģ�ѹ���Ը��������������ܱڵ�Ħ�����õ�������ˣ��ڴ˶�ˮƽ������Ĺܵ������У�������ˮƽ�ܵ��ڸ����ٶȵĸ���״̬�����������к㶨����U������֮�⣬�������¼��裺�ٹܵ����κ�С�����ܵ�λ�Ʋ������ƣ��ں��Թܵ�����ת���Ժͼ��б��Σ��۸��岻��ѹ����
�ܵ����˶�״̬���Է�Ϊ�ޱ��εij�ʼ״̬�ͱ����е���״̬��Ϊ�����������ÿһ״̬�Ͻ�������ϵ�����̶�����ϵ��(Eulerian ����ϵ(x, y, z))������ܵ��˶�������ϵ��(Lagrangian ����ϵ(X, Y, Z))���عܵ���������Ȼ����ϵs����ͼ1��ʾ���ܵ�λ��������ϵ���п��Ա�ʾΪ(u��v��w)���������ܵ��IJ���ѹ�������ɱ�ʾΪ������ʽ��
 (1)
(1)
����
 (2)
(2)
�Ӳ���ѹ���������Կ�����3������Ĺܵ�λ�ƴ��ڱ任��ϵ������ʽ(1)��(2)�еı任��ϵ����ܵ�������λ����ʽ�����ڿ��Ʒ����У���ܵ�����ά����ֻ����y��z�����ϵ����������֮��ķ����У���
 (3)
(3)
��
 (4)
(4)
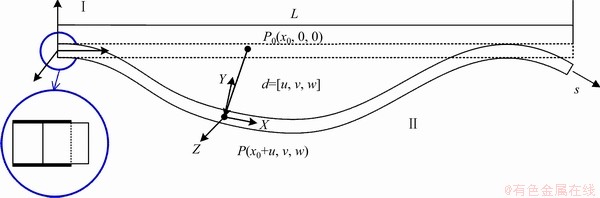
ͼ1 �ܵ�����ͼ
Fig. 1 Layout of horizontal pipe conveying paste
1.2 ���Ʒ���
��������˽�֧�����ܵ������������ܵ�ϵͳ��һ������ϵͳ������ϵͳ���������Ľ��������Բ���ֱ��Ӧ��HALMITONԭ��[15-16]��KHEIRI��[16]����һ�����������ϸ�Ļع˺ͷ����������������ڿ���ϵͳ�ĸĽ���HALMITON�������ڴ˻���֮�ϣ�WADHAM-GAGNON��[10]���������ڿ���ϵͳ��Hamiltonԭ�������˾����м䵯�ɺ�ĩ�������Ĵ�ֱ�����ܵ���ά�������Ŀ��Ʒ��̣�����������Ʒ��̻����ϣ����������м䵯��ˮƽ�����ܵ�������������·������������ȥ�м䵯�ɺ�ĩ��������Ӱ�죬�õ�����������ܵ�ˮƽ����3-D�Ŀ��Ʒ��̡�
y�����ϣ�





 (5)
(5)
z�����ϣ�





 (6)
(6)
ʽ(5)��(6)�е������������£�

 ,
,


ʽ�У� ��
�� �ֱ�Ϊy��z�����ϵ�������λ�ƣ�
�ֱ�Ϊy��z�����ϵ�������λ�ƣ� Ϊ�������������ٶȣ����Ʋ�ֱ������������ʱ��
Ϊ�������������ٶȣ����Ʋ�ֱ������������ʱ�� ����������������
���������������� �ĵ�������
�ĵ������� �ֱ��������ܵ��ĵ�λ����������������uf��ʾ�����ٸ������٣�
�ֱ��������ܵ��ĵ�λ����������������uf��ʾ�����ٸ������٣� Ϊ�Ľ����
Ϊ�Ľ����
1.3 ����U������
���Ʒ���ʽ(5)��(6)��uf�ɹܵ�����������U�任�������ڷ��̵��Ƶ������У���Ϊ�����عܵ�������ȷֲ������Ը�����˵������Ϊһ�ַ�ţ�����壬������ԣ��ڹܵ������У��ٶ��ؽ��治���ȡ��Ⱞ���[12]���ܵ��ڸ�����������Ϊ�����������������������ͻ���������3���������У������������ͼ�������������Ϊ����������ͼ2��ʾ��
��ͼ2���Կ������������������ڣ����ٲ��䣬�ڼ�����������������ܵ��뾶�����С���ڻ����������ٿ��ټ�С���ٶ��ݶȼ��������ܵ��Ŀ��Ʒ����У�UֵӦ��Ϊƽ�����٣����ǵ������ٶ��ڹܵ�������ϲ����ȷֲ������Ա��滬��������ƽ�����ٵļ������£�
 (7)
(7)
ʽ�У�UcΪ�������������٣�r0Ϊ���������ȣ�DinΪ�ܵ��ھ���

ͼ2 ���ڸ����������ٷֲ�ͼ
Fig. 2 Distribution of velocity of paste flow around pipe cross-section
2 �������
2.1 ������ɢ
�������ܵ���һ������ϵͳ�������������ɶȣ��Կ��Ʒ��̽���٤�ɽ���ɢ������ת��Ϊ�������ɶ�ϵͳ������ֵ��⡣������У�ѡ��N=2���ض�ģ̬Ϊ2�ף������ϣ�NԽ��������õĽ�Խ��ȷ������ʵ�ʵ��������У�N����ʱ��������ļ�����������������Եأ�ȡN=2ʱ���÷��̿��Եõ�һ����Ծ�ȷ�Ľ��[8]����������У�������λ�ƿ��Ա�ʾΪ�������������������κ���������Ӧ�����˻�֮�ͣ��磺

 (8)
(8)
ʽ�У� ��
�� �������������������
������������������� ��
�� Ϊ��������Ӧ������NΪ�ضϽ���������ѡN=2�����У����������������ı߽������������������Ķ��Ǻ���λ�ƣ�������������ͬ�ģ���
Ϊ��������Ӧ������NΪ�ضϽ���������ѡN=2�����У����������������ı߽������������������Ķ��Ǻ���λ�ƣ�������������ͬ�ģ���

 (9)
(9)
ʽ�У� Ϊ������������
������������ ����
���� ��
�� ��
��
�� ��
�� ���������ٻ������ж��������ɢ���������������������ԣ��ֱ��������Ȼ����[0, 1]�ϻ��֣�����y����ķ������£�
���������ٻ������ж��������ɢ���������������������ԣ��ֱ��������Ȼ����[0, 1]�ϻ��֣�����y����ķ������£�


 (10)
(10)
z����ķ���Ϊ


 (11)
(11)
ʽ(10)��(11)�и���ϵ����һ�µģ�����Gi�������ֻ��y������ڣ����㷽ʽ���£�
 ��
�� ��
��
 ��
��

 ��
��
 ��
��
 ��
��

 ��
��
 ��
��
 ��
��

2.2 ���ǰ�ķ���
����ֵ�����У�ѡȡ������������ֵΪ ��
�� �����IJ���4��Runge-Kutta������ɢ��õ��ij��ַ����������⣬�õ�
�����IJ���4��Runge-Kutta������ɢ��õ��ij��ַ����������⣬�õ� �����
����� �����ϵĹ���λ�������ܵ��ھ�����
�����ϵĹ���λ�������ܵ��ھ����� ����λ��ֵ
����λ��ֵ ��
��
 ���ڳ��ַ���������У�Ϊ�˵õ����յ���ֵ�������ʼ�������������������������⣬��������ά�ܵ������У���ֻ����һ�������ϵij�ʼֵ�����õ��Ľ��������һ�������˶������ֶ�άƽ�������ԡ���ʼ�������GHAYESH��[11]�Գ�ʼ�����Ĵ�����ʽ����
���ڳ��ַ���������У�Ϊ�˵õ����յ���ֵ�������ʼ�������������������������⣬��������ά�ܵ������У���ֻ����һ�������ϵij�ʼֵ�����õ��Ľ��������һ�������˶������ֶ�άƽ�������ԡ���ʼ�������GHAYESH��[11]�Գ�ʼ�����Ĵ�����ʽ���� Ϊ
Ϊ �����ⱶ�������ǵ��ֳ���ʵ�����������ij�ʼλ��ȡֵȡ�İٷ�֮һ����=-0.04��
�����ⱶ�������ǵ��ֳ���ʵ�����������ij�ʼλ��ȡֵȡ�İٷ�֮һ����=-0.04�� =0��
=0�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
��
���ȶ�������������Ӱ������������������Ϊy�ĸ������Ҳ��䣬�ֱ����������������¹ܵ�����������жԱȡ���ͼ3���Կ�����ʱ������ͼ�ı仯�������ƣ�����ϵͳ��չ���ƣ���ƽ��λ����0ƫ�Ƶ��� ���ң�PAIDOUSSIS[17]Ҳָ����
���ң�PAIDOUSSIS[17]Ҳָ���� ��
�� �¹ܵ��Ļ�������ѧ��Ϊ�����Ƶġ�Ϊ�˸������������ܵ�����״̬���ٶȱ仯�µĹ��ɣ�����������������̫������µĹܵ�����Ӱ����ֵ����ȶ��ԣ��������Ȳ�����������Ӱ�죬��Ҫ̽���������ٶȱ仯�Թܵ�����ѧ��Ϊ��Ӱ�졣
�¹ܵ��Ļ�������ѧ��Ϊ�����Ƶġ�Ϊ�˸������������ܵ�����״̬���ٶȱ仯�µĹ��ɣ�����������������̫������µĹܵ�����Ӱ����ֵ����ȶ��ԣ��������Ȳ�����������Ӱ�죬��Ҫ̽���������ٶȱ仯�Թܵ�����ѧ��Ϊ��Ӱ�졣

ͼ3 �������������uf=0.5ʱ��ʱ������ͼ
Fig. 3 Time trace diagrams with uf=0.5 in presence or absence of gravity
3 ����������
�����ٿ��Ʒ��̲�ȡ�ضϽ���N=2����٤�ɽ���ɢ��ƫ�ַ��̱���Ϊ4������������ܵ�ϵͳ���ַ��̣�������������Ӱ�죬���������ֵ��⣬���Ľ������ʱ������ͼ����ƽ��ͼ���˶��켣ͼ�ͷֲ�ͼ�����֡����У�ʱ������ͼ�������ر��ָ������ܵ���ijһ�����ֵ��ʱ��ı仯��������������������ܵ����ٶȺܵ�λ�Ƶ���ع�ϵ����ƽ��ͼ��λ��Ϊ�����ꡢ�ٶ�Ϊ�����꣬����ܵ�����ĩ��λ�ƺ��ٶ���ʱ��ı仯����ͷ��ָ��ϵͳ���巢չ���Ƶķ����˶��켣ͼ�����������ϵ�λ�Ʒֱ���Ϊ�����ᣬ��ʾ�˹ܵ����ɶ˵��˶��켣���ֲ�ͼ���Դ������ϸ����ܵ�����ĩ�˵�λ������Ʋ�������������uf�ı仯���ɣ�������������������ijһ�ض������״̬�����е�ͼ����δ�ر�������Ա�ʾ���ǹܵ����ɶ˴�������Ӧͼ��
������Ҫ�о��������ٶ�0~16���ڡ�������ʱ��0~200֮�ڵĹܵ�����ĩ��λ����Ӧ������ܵ�������˶�����ڷֲ�ͼ�и������ֲ�ͼ�йܵ����ɶ���λ���ڹܵ�������ȶ�ʱȡ�ã����Գ�ʼ�β��ȶ��������ܵ�ĩ�˵��ٶ�Ϊ0ʱ���� ��
�� ʱ����¼��ʱ�Ĺܵ�ĩ�˵�λ��ֵ���������ʽ����ó���
ʱ����¼��ʱ�Ĺܵ�ĩ�˵�λ��ֵ���������ʽ����ó���
 ��
�� �����Ե����ʽ���������ٶ�Ϊ�����ꡢĩ��λ��Ϊ�������ͼ�еõ��ֲ�ͼ��ͼ4��ʾ��ͼ4��ӳ�˹ܵ����ɶ���������ܵ����ɶ�λ����Ӧ����ڸ���������ƽ������uf�ı仯���ɡ�
�����Ե����ʽ���������ٶ�Ϊ�����ꡢĩ��λ��Ϊ�������ͼ�еõ��ֲ�ͼ��ͼ4��ʾ��ͼ4��ӳ�˹ܵ����ɶ���������ܵ����ɶ�λ����Ӧ����ڸ���������ƽ������uf�ı仯���ɡ�
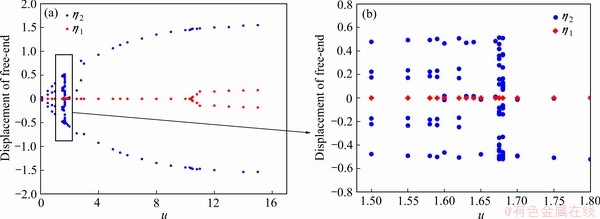
ͼ4 �Թ�������������ufΪ���Ʋ����Ĺܵ����ɶ�λ�Ʒֲ�ͼ
Fig. 4 Bifurcation diagrams of free-end displacement using dimensional velocity in pipe as control parameter
���۹�������ϵͳ��һ�DZ���ϵͳ����ʧ������Hopf�ֲ�����IJ���ʧ�ȡ���ͼ4���Կ�������������ϵͳ��uf����Ĺ����д���һ���ٽ��ٶ�ucr����u��ucrʱ���ܵ�ĩ�������ʱ��˥����ufԽ��˥���ٶ�Խ�죬λ������Ϊ0������ϵͳ��������ȶ������������ٳ����ٽ����ٺܵ�ĩ������ȼ�С��Ȼ��ʼ����һ���ض�ֵ����ʼ������������ŷ����˲���ʧ�ȣ���һ���ΪHopf�ֲ��㡣��ͼ4�п��Կ����������ϵ� 10.55����������������Ϲܵ������ֲ�������磬���Կ�����
10.55����������������Ϲܵ������ֲ�������磬���Կ����� 0.005���ҡ�=6500����ʱ���ܵ��Ϳ�ʼ���ֵĶನ�����������ͼ5��ʾ�����⣬����������ϵ��仯����ͼ4�ұ�С��ͼ���Կ�����uf��0.005~1.8������λ�Ƶ�ʮ���ܼ�����ʱ�ܵ���������չ�ֳ����Ӹ��ӵĶ���ѧ��Ϊ��
0.005���ҡ�=6500����ʱ���ܵ��Ϳ�ʼ���ֵĶನ�����������ͼ5��ʾ�����⣬����������ϵ��仯����ͼ4�ұ�С��ͼ���Կ�����uf��0.005~1.8������λ�Ƶ�ʮ���ܼ�����ʱ�ܵ���������չ�ֳ����Ӹ��ӵĶ���ѧ��Ϊ��
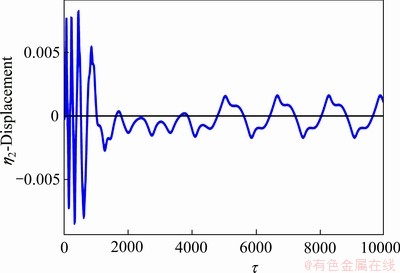
ͼ5 uf =0.005ʱ�� 2����ܵ�ĩ����״̬ͼ
Fig.5 Vibration diagrams of free-end at various for uf =0.005 in �� 2 direction
������(x-yƽ��)��Ҫ�ر�������ٶȷ�ΧΪ10~13�����ڣ�������(x-zƽ��)Ϊ1.5~3.0�����ڣ����������Ϸ������ص㲢����һ���ٶ������ڣ�Ϊ�˸������������ܵ��Ķ���ѧ��Ϊ����Թܵ�����ά��״̬�ֱ�����������ϵĽ��з�����
3.1 ������(x-yƽ��)����
���ٶȴﵽ�ֲ���֮ǰ����uf��ucrʱ����uf=0.001~10�����ڣ��Ա�ͼ3(a)��6(a)���֣�uf=0.5�� 14ʱ���ܵ��������ϵ�λ��Ϊ0������uf=4��2.5����ʱ�ܵ�λ���Ѿ�Ϊ0����һ���У����ٵ���������ĸ������ܵ�ϵͳ�����������ʱϵͳ�նȼ�С��Ӱ�죬�����ϣ��ܵ���������˥��Խ��Խ�졣��ͼ6(b)�п��Կ�������uf
14ʱ���ܵ��������ϵ�λ��Ϊ0������uf=4��2.5����ʱ�ܵ�λ���Ѿ�Ϊ0����һ���У����ٵ���������ĸ������ܵ�ϵͳ�����������ʱϵͳ�նȼ�С��Ӱ�죬�����ϣ��ܵ���������˥��Խ��Խ�졣��ͼ6(b)�п��Կ�������uf 9ʱ��0~2��Χ�ڣ��ܵ��ȶ�֮ǰ�ֻ����һ�β���������Ϊ���������uf��������ʱ��Ȼ���ڣ���̬�������ƣ�����β�����������������û�жԴ˷�����֮��ķ�չ��Ӱ�졣��ķ�����uf=4ʱ�Ϳ�ʼ���֣�������ͼ6(c)�п��Կ�����
9ʱ��0~2��Χ�ڣ��ܵ��ȶ�֮ǰ�ֻ����һ�β���������Ϊ���������uf��������ʱ��Ȼ���ڣ���̬�������ƣ�����β�����������������û�жԴ˷�����֮��ķ�չ��Ӱ�졣��ķ�����uf=4ʱ�Ϳ�ʼ���֣�������ͼ6(c)�п��Կ����� 0.005ʱ���ܵ����ٶȻᷢ��һ��ͻ�䣬��Ӧͼ6(a)��0.3ʱ��һ��������������˵������ķ�����
0.005ʱ���ܵ����ٶȻᷢ��һ��ͻ�䣬��Ӧͼ6(a)��0.3ʱ��һ��������������˵������ķ�����

ͼ6 ��ͬ�����¦� 1����ܵ�ĩ����״̬ͼ
Fig. 6 Vibration diagrams of free-end at various flow velocity in �� 1 direction
��������uf=10ʱ���ܵ�����֮����ͼ6(b)���������ȶ������dz��ֿ�ʼ����˥��������ʽ(��ͼ7(a))��ϵͳ���ջ��ȶ��������������ٶȵ�����ϵͳ�ص��ȶ������ʱ��ҲԽ��Խ�ࡣ��uf =10.55����ʱ����ͼ7(b)�п��Կ��������������1.2���ҹܵ���ʼС����������ͼ7(c)��7(d)���������ؿ��������ܵ�ĩ�˴������������Ȼ�������ȶ��������ճ��ּ������������������ٵ�����uf =13ʱ�� 90~100�ڣ�����ͼ7(f)���ͼ7(e)��������˵����ʱ���������ʱ��ĸ���������uf��13~16��Χ�ڣ����ͼ4���֣���������ٶ������������û�й۲쵽��������
90~100�ڣ�����ͼ7(f)���ͼ7(e)��������˵����ʱ���������ʱ��ĸ���������uf��13~16��Χ�ڣ����ͼ4���֣���������ٶ������������û�й۲쵽��������
3.2 ������(x-zƽ��)����
�����Ϲܵ�����״̬��ԱȽϸ��ӣ��ٽ��ٶȺ�С�������ٽ��ٶȺ�uf=0.005ʱ���ܵ��ڷ����ನ���������֮ǰ���ȷ���һ���������ƵIJ������˶�����Ϊ����ͼ5��0~4000�ڵ���

ͼ7 ��ͬ�����¦� 1����ܵ�ĩ����״̬ͼ
Fig. 7 Vibration diagrams of free-end at various flow velocity in �� 1 direction
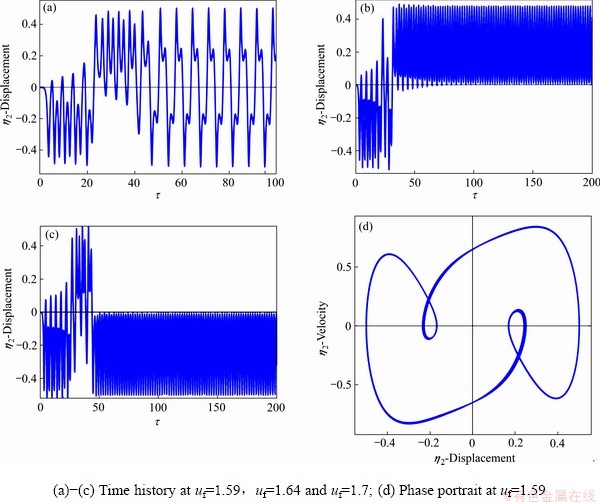
�����ٶ����ﵽ������ʱ����٣���Ƶ�����Լӿ졣��uf=1.59ʱ���Ա�ͼ7(b)��8(a)���Կ���������ʽ������ͬ�����ָ���������ʱ��һ�������������������һ�����ȣ���ͼ8(d)��Ҳ�۲쵽����4���ٶ�Ϊ0�ĵ㡣��uf=1.6~1.73ʱ����������ʼ��ʧ���ܵ��˶����ֳ�ֵ��ע������ԣ���ʼʱ����ڵ��˶�״����֮��Ĺܵ��������������ϵ�ƽ��λ���кܴ��ϵ���Ա�ͼ8(b)��(c)���Կ����������ٶȵ�����ƽ��λ���������䲻������������һ�ٶ������ڣ���ʼ������dz������Ҳ��ȶ�����ʾ��һЩ�������������֮��û�г��ֻ��磬���վ��ص�������״̬��
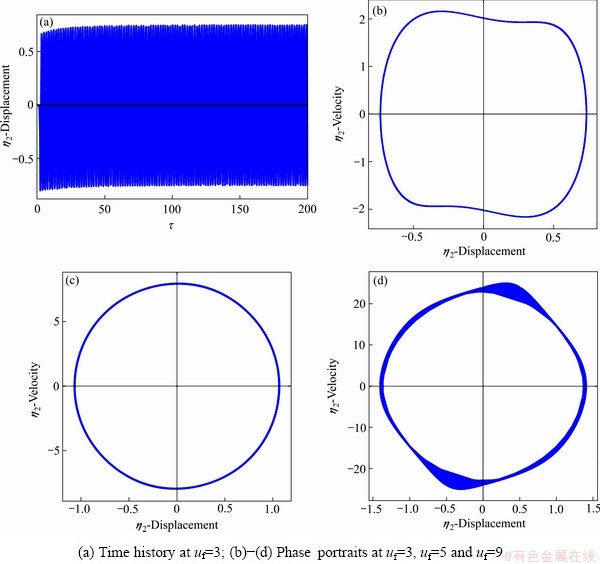
��uf��1.73����3ʱ���������ҳ���ʱ��Խ��Խ�̣�uf=3ʱ��������ٴ��ڣ���ʱҲԤʾ�Źܵ�����ƽ��λ�ûص�0����ͼ9(a)��ʾ����uf��������ʱ��ƽ��λ�ò��䣬����Ȼ���ּ���������������������������ٶȵ��������������������У��Ա�ͼ9(b)��(c)���Կ����������ԳƵ���״�ڲ��Ϸ����仯����uf=5ʱ����Ϊ�ܹ������Բ�Ρ���uf=9ʱ����ͼ9(d)���Է�������������uf=13ʱ���Ƶ�������ʱ�����������ż����˶�������������ʼ��������仯�ĸ�������
3.3 �ܵ�����ĩ����ά�ȷ���
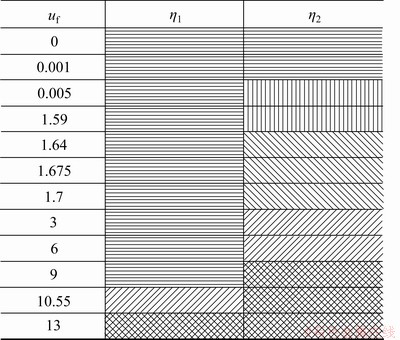
��������������������ƽ���ڹܵ����ɶ��˶����ٶȵı仯�����ܽ��ڱ�1�У����У����ߴ����ȶ�״̬�����ߴ����ನ�������������б��(\)�����ȶ�����������б��(/)��������仯�ĸ��������������ƽ��λ�ñ仯��������
ͼ8 ��ͬ�����¦� 1����ܵ�ĩ����״̬ͼ
Fig. 8 Vibration diagrams of free-end at various flow velocity in �� 1 direction
ͼ9 ��ͬ�����¦� 2����ܵ�ĩ����״̬ͼ
Fig. 9 Vibration diagrams of free-end at various flow velocity in �� 2 direction and ��=90-100
��1 ��ͬ���������¹ܵ�ĩ�˶���ѧ��Ϊ
Table 1 Free-end dynamics of pipe at various flow velocity
��2 ��ͬ�ٶ��¹ܵ�ĩ�˶�ά����ά��
Table 2 2D or 3D vibration of pipe free-end at various flow velocity

�ܵ�ĩ����ά����ѧ��Ϊͨ������ƽ���ڵ��˶������γɣ��������Ϸ�����ƽ���ٶȲ�ͬʱ�ܵ���ƽ�����ά�����2��ʾ�����У����ߴ����������ߴ�����άƽ��������б��(/)�����ܵ��ɶ�ά����ά���ɣ����������ά���������ٵ���0.001ʱ���ܵ��ȶ�����Ӧ�ڱ�2�еĺ��߲��֣������ڸ������ٳ��������ٽ����ٷ���ʧ��ʱ�������ϴ�ʱ��δʧ�ȣ��ȵ�������ֻ����x-zƽ���ڵĶ�ά����Ӧ�ڱ�2�е����߲��֡���uf=10~10.55ʱ���������ϻ����˥����λ�ƣ��ڹܵ�ĩ��λ��δ�ص�0ʱ�����Թ۲쵽ͼ10(a)�л��ε���ά����Ӧ�ڱ�2������б�߲��֡����ٶȳ��������ϵ��ٽ����ٺܵ�ĩ�˳�����ά���˶��켣ͼ��ͼ10(b)��ʾ��Ϊһ���ۡ�8���εļ����˶�����Ӧ�ڱ�2�е����֡�

ͼ10 �ܵ����ɶ���ά�˶��켣ͼ
Fig. 10 3D oscillation trajectories of free-end of pipe
4 ����
1) ��������ƽ������uf��0.001ʱ���ܵ��ȶ���0.005ʱ��x-yƽ�����ȶ���x-zƽ�����ʧ�ȣ���ʼ���ֶನ��������������ٶ�����x-yƽ������ȶ���x-zƽ��������Ƶ�ʺ��������
2) uf��1.59ʱ����ʼʱ����ڹܵ����ɶ�λ����ʱ��ı仯�������ɣ��ȶ����������ƽ��λ����������������uf��1.7ʱ��ʼʱ�������ʼ��������ƽ��λ�ÿ�ʼ��������0�㣻uf =3ʱ��ƽ��λ�ûص�0���ٶȼ���������������Ȼ����������uf=9���ҳ���������ȶ��ĸ�������uf =10.55ʱ��x-yƽ����Ҳ��ʼʧ�ȣ������������������ܵ�ϵͳ3ά����ʧ�ȣ�uf =13ʱ������ƽ���ھ�����������ȶ���������
REFERENCES
[1] �Ⱞ��, ���齭. �����������������뼼��[M]. ����: ��ѧ������, 2015.
WU Ai-xiang, WANG Hong-jiang. Theory and technology of paste backfilling on metal ore[M]. Beijing: Science Press, 2015.
[2] �Ⱞ��, �� Ө, �̺���, ��˳��. �� ��. �й����弼����չ��״������[J]. ���̿�ѧѧ��, 2018, 40(5): 517-525.
WU Ai-xiang, YANG Ying, CHEN Hai-yong, CHEN Shun-man, HAN Yue. Status and prospects of paste technology in China[J]. Chinese Journal of Engineering, 2018, 40(5): 517-525.
[3] NI Q, WANG Y, TANG M, LUO Y, YAN H, WANG L. Nonlinear impacting oscillations of a fluid-conveying pipe subjected to distributed motion constraints[J]. Nonlinear Dynamics, 2015, 81(1/2): 893-906.
[4] GREGORY R W, PAIDOUSSIS M P. Unstable oscillation of tubular cantilevers conveying fluid, ��. Theory[C]// Proceedings of the Royal Society of London, Series A. Mathematical and Physical Sciences, 1966, 293(1435): 512-527.
[5] GREGORY R W, PAIDOUSSIS M P. Unstable oscillation of tubular cantilevers conveying fluid, ��. Experiments[C]// Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences, 1966, 293(1435): 528-542.
[6] PAIDOUSSIS M P, ISSID N T. Dynamic stability of pipes conveying fluid[J]. Journal of Sound and Vibration, 1974, 33(3): 267-294.
[7] PAIDOUSSIS M P, SEMLER C. Nonlinear and chaotic oscillations of a constrained cantilevered pipe conveying fluid: a full nonlinear analysis[J]. Nonlinear Dynamics, 1993, 4(6): 655-670.
[8] �� ��, �� ��. ��Һ�ܶ���ѧ�����Ϳ���[M]. ����: ��ѧ������, 2015.
XU Jian, WANG Lin. Dynamics and control of fluid- conveying pipe system[M]. Beijing: Science Press, 2015.
[9] ������, �� ��. �ֲ�ʽ�˶�Լ����������Һ�ܵIJ��������о�[J]. ��ѧѧ��, 2019, 51(2): 558-568.
WANG Yi-kong, WANG Lin. Parametric resonance of a cantilever pipeline conveying fluid subjected to distributed motion constraints[J]. Chinese Journal of Theoretical and Applied Mechanics, 2019, 51(2): 558-568.
[10] WADHAM-GAGNON M, PAIDOUSSIS M P, SEMLER C. Dynamics of cantilevered pipes conveying fluid. Part 1: Nonlinear equations of three-dimensional motion[J]. Journal of Fluids and Structures, 2007, 23(4): 545-567.
[11] GHAYESH M H, PAIDOUSSIS M P. Three-dimensional dynamics of a cantilevered pipe conveying fluid, additionally supported by an intermediate spring array[J]. International Journal of Non-Linear Mechanics, 2010, 45(5): 507-524.
[12] �Ⱞ��, �̺���, ������, ���齭, ������, ���. ���ǹܱڻ���ЧӦ����ܵ���������������[J]. �й���ɫ����ѧ��, 2016, 26(1): 180-187.
WU Ai-xiang, CHEN Hai-yong, WANG Yi-ming, WANG Hong-jiang, LIU Xiao-hui, LI Gong-cheng. Transport resistance characteristic of paste pipeline considering effect of wall slip[J]. The Chinese Journal of Nonferrous Metals, 2016, 26(1): 180-187.
[13] WU A, RUAN Z, WANG Y, YIN S, WANG S, WANG Y, WANG J. Simulation of long-distance pipeline transportation properties of whole-tailings paste with high sliming[J]. Journal of Central South University, 2018, 25(1): 141-150.
[14] �ձ���, ���ƽ, �Ⱞ��, ���齭, �����. �����Ͻ��ܵ������дֹ��Ͽ����˶����ɷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(1): 172-179.
YAN Bing-heng, LI Cui-ping, WU Ai-xiang, WANG Hong-jiang, HOU He-zi. Analysis of law of movement of coarse aggregate particles in pipeline transportation of paste[J]. Journal of Central South University (Science and Technology), 2019, 50(1): 172-179.
[15] KHEIRI M, PAIDOUSSIS M P, DEL POZO G C, AMABILI M. Dynamics of a pipe conveying fluid flexibly restrained at the ends[J]. Journal of Fluids and Structures, 2014, 49: 360-385.
[16] KHEIRI M, PAIDOUSSIS M P. On the use of generalized Hamilton��s principle for the derivation of the equation of motion of a pipe conveying fluid[J]. Journal of Fluids and Structures, 2014, 50: 18-24.
[17] PAIDOUSSIS M P. Fluid-structure interactions: Slender structures and axial flow (Vol.1)[M]. London: Academic Press, 2014.
Analysis of three-dimensional nonlinear vibration of horizontal cantilevered pipeline conveying paste at various flow velocity
LI Rong1, 2, LI Cui-ping1, 2, YAN Bing-heng1, 2
(1. School of Civil and Resource Engineering, University of Science and Technology Beijing, Beijing 100083, China;
2. State Key Laboratory of High-Efficient Mining and Safety of Metal Mines, Ministry of Education, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: In the process of paste-filling, the violent vibration of the horizontal pipeline conveying paste close to paste-filling area tends to affect the effect of filling and efficiency greatly. To investigate the effect of paste average flow velocity on vibration, the analysis model was obtained for the horizontal pipeline conveying paste according to the actual condition on site. Based on this, the governing equations for nonlinear three-dimensional dynamics were deduced. By the Galerkin discretization and the Runge-Kutta algorithm, the equations were solved numerically and the dynamic responses of free-end which were presented by time trace, bifurcation diagram, phase-plane diagram and oscillation trajectories were obtained. The numerical results show that there is a critical flow velocity which is different in two dimensions when non-dimensional velocity of paste uf increases, and ucr is 10.55 in ��1, ucr is 0.001 in ��2. It also shows that the pipe is stable as uf��ucr. When uf��ucr, the pipe loses stability via flutter, meanwhile, the period and quasi-period vibration are observed. Moreover, the amplitude of vibration increases as uf increases.
Key words: paste transportation; three-dimensional vibration of pipeline; nonlinear; average flow velocity
Foundation item: Project(2017YFC0602903) supported by the National Key Research and Development Program of China
Received date: 2019-09-02; Accepted date: 2019-12-25
Corresponding author: LI Cui-ping; Tel: +86-10-62334756; E-mail: cpli@ustb.edu.cn
(�༭ ������)
������Ŀ�������ص��з��ƻ�������Ŀ(2017YFC0602903)
�ո����ڣ�2019-09-02�������ڣ�2019-12-25
ͨ�����ߣ����ƽ�����ڣ���ʿ���绰��010-62334756��E-mail��cpli@ustb.edu.cn

