�����Ų������ı������л������ȶ��Ժ�³����
������1���Խ�1���ϣ��1������2
(1. ��������ҵ��ѧ �����˼�����ϵͳ�����ص�ʵ���ң������� ��������150080��
2. �й���ѧԺ ������ѧ���ܻ�е�������о��������� ������130033)
ժҪ������һ�ָ��ӽ����������ߵ�����Բ�沽̬ģ�ͣ�����Lagrange������ײʱ�̽Ƕ����غ�ԭ���ֱ��������˵İڶ�ģ�ͼ���ײģ�͡����ڶ�ģ�Ͳ�̬������������Ŷ��������Ƶ�ȷ��������ȫ���ȶ��Է�����ֲ��ȶ��Է������ϣ���ģ�ͽ��г�ʼ�IJ����Ż����ã�������Proe����ģ�ͣ�ͨ����������������Ŷ��²�ͬ����ģ�Ͳ�̬���������ڱ仯���������ջ��ģ�Ͳ��������Ż����ã���ͨ��ʵ������������ʵ��������۷�����֤�����������������к����Źؽ������ı������л������и�ǿ�������ȶ�����³���ԡ�
�ؼ��ʣ��������У������ˣ�˫�㣻�ȶ��ԣ�Poincar��ӳ�䣻������
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2012)06-2157-08
Stability and robustness of biped passive dynamic robot based on hip mass
WU Xiao-guang1, ZHAO Jie1, ZANG Xi-zhe1, ZHU Lei2
(1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China;
2. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)
Abstract: The effect of upper body on the stable and robust walking of passive dynamic walking robot was researched, based on a compass-gait model which more closely resembled the human walking. The swing stage and the collision stage were modeled by Lagrange method and the principle of angular momentum conservation. Based on the proper description on the basins of attraction of the robot��s gait and the detection of the robot��s quick disturbance-rejection capabilities to random disturbances, the global stability analysis was combined with the local stability analysis. The initial parameters were configured optimally, and the Proe prototype model was built. The self-regulation of the walking gait under singular or continuous random disturbance was analyzed to obtain the optimized design parameters, thus the actual prototype was produced. The experiment on the actual prototype of dynamic model confirms that any passive dynamic robot with reasonable mass of hips performs more efficient and stable walking gait on a slight slope.
Key words: passive dynamic walking; robot; biped; stability; poincar�� map; basin of attraction
�����������л������о�ȡ�úܴ�չ���ѿ��������ֲ��л����ˣ��������������Ĵ��Ƹ��ӵ����⡣��ͳ�����Ը����ؽڽǽ��о�ȷ���ƣ�����ʵ�ֻ����˸�Ч���ܵ����߲�̬�����ǣ����Ǽ������������ߵ��о�����������֯�ṹ���˶���������Ϊ��ʽ�з��֣��������߹����аڶ��ȵ�������˫���˶�ʮ�����ƣ���һ���ֶ�����������ʵ�ֵ�[1-2]��McGree[3-4]����һ����ȫ������������ƵĻ����˽��������������£�����С�¶ȵ�ƽ��б�����ȶ��������ߵ�ģ�ͣ�����������������С��ĸ��˫��������ڱ������й����г�������������������ԣ��������������[5-8]���������е������ȶ�����������������ԡ�������һ������IJ���ֵ����û�������Ŷ��»����˾�����֮Ψһ��Ӧ���ȶ����߲�̬���������л����˵���������ҪԶ�ȴ�ͳ��˫������˵�С��������ijЩ������������»�����������ߵ��������ġ�Ȼ������¸�������˵IJ�̬�ȶ��Զ��������ṹ����������Ŷ��ĸ������ԣ���ˣ���û����˺����IJ����Ż����ã����ڻ����˲�̬�ȶ�����Ϊ��Ҫ��������Ը�������˵��о���ȡ��һ���ijɹ���Huang��[9-11]�о�����ģ�������ֲ����ڻ����˲�̬������ͻ���������Ч�ʡ��ܺĵ�Ӱ�졣Asano��[12]��2007���о������Ӵ���ײʱԲ���νŶڶ���������ĵ�Ӱ�죬������ϴ����뾶���Լ�����ײʱ��������ʧ��Liu��[13]ͨ����ӳ�䷨����Բ�ν�ģ�͵���뾶���������Լ�ת�������Ȳ������ڻ����˲�̬�������Ӱ�졣Wisse��[5]�ڲ��������ɶȵ�ǰ���£�������ͨ���Źؽڴ��Ķ��ֻ������̶�����˫�ȽǷ����ϣ���ͨ���Źؽ������������Եķ���������������������ڻ����˲�̬�������Ӱ�졣�������Ƚ�������ģ�ͣ�����Lagrange����Ƕ����غ�ԭ���ֱ���Բ�沽̬ģ��[5]�ڰڶ�������ײ�εĶ���ѧ���̡���Matlab�����¶���������ͬ�Źؽ������Ի����˲�̬��������̬����ʱ��̬������Ӱ�죬ȷ��������ģ�ͽṹ�����������Ż������Լ���̬���ߵij�ֵ����ģ�Ͳ����Ż����û����Ϲ���Proe����ģ�ͣ�����Adams������ʵ����Proe ��������̬���ߣ�ͬʱ��ͨ����ͬ�Źؽ�������Proe�����ڵ��浥������Ŷ��������Ŷ��µ�����ʵ�飬˵���Źؽ������Ի����˵IJ�̬�ȶ�����³������������Ӱ�졣�����Ʋ��ӹ���ʵ��������ͨ����ʵ�����в�ͬ�Ȳ�������ʵ������������ʵ�飬��һ��˵���Źؽ�����ȡֵ����ʱ�������л��������߲�̬���и��ߵ��ȶ�����³���ԡ�
1 ����ģ�������Ͷ���ѧ��ģ
���о����õ�2-Dֱ�ȱ������л����˾���2���ȼ����������ȣ��ֱ�����2���Ⱥ��ڲ��2���ȹ�����һ�𣬽�������˲����ȶ������⡣2������ֱ��ͨ��1�������������ᣬ��ͼ1��ʾ��ģ�͵������˶���������ͼ����ʾ��ƽ���ڡ�2���Ⱦ�����ȫ��ͬ�������ͼ��β������������ȷֲ���Ϊm1����������ĵ�ת��������ΪJ���ȳ���Ϊl�����ľ����Źؽڵľ���Ϊc���Źؽ�����Ϊm2��Ϊ���ӻ������˶����ȶ��ԣ�����Բ���㣬�뾶Ϊr�����ڻ�����˫�ȵ��˶����̿�����Ϊ˫���˶�����ģ�Ϳ�����Ϊ����Բ�沽̬ģ�͡�Ϊ����ģ���в�����������ʹ�������Ķ���ѧ���̾��и���������ԣ������������ٻ�����r=r/l��c=c/l��m2=m2/m1��J=J/(m1l2)���ҽ�ʱ�������ٻ�Ϊ ��б����Ǧ�Ϊ�ⲿ��������Ϊ����������
��б����Ǧ�Ϊ�ⲿ��������Ϊ����������
2 ����ѧ��ģ
�ں����ij�ʼ�����£�ͨ�������������Ĺ������ã�ģ�Ϳ���С�¶ȵ�б���ȶ��������ߡ���ÿһ�����˶����̿ɷ�Ϊ2���Σ��ڶ�������ײ�Ρ�

ͼ1 ģ��ʾ��ͼ
Fig.1 Sketch of model
2.1 �ڶ���
���ڶ����뿪����ʱ��֧������֧�������������˶����ڶ��������Źؽ��������˶������ðڶ��������Ż��߹켣�˶���֧���������˶����ù�����ֻ�������������ʰڶ�������ϵͳ��е���غ㡣��Lagrange�����Ƶ��ýεĶ���ѧ���̣��ðڶ�ģ�����£�
 (1)
(1)
����








2.2 ��ײ��
Ϊ������ײ�εĶ���ѧ���̣���һ�����裺�ڶ����������ײ˲ʱ��ɣ��ڶ��Ⱥ�֧���Ƚ�ɫ��������ײ�㴦���ܵ��������ã�����ײǰ�����Ƚ��ٶȷ����仯�������ȽǶȲ��䡣����1����ײ���̣�����ϵͳ������ײ��(cp)������ײ��İڶ��ȹ����Źؽڵ�(H)���ֱ�����Ƕ����غ㡣����ײ˲��ǰ��ֱ����ϽDZꡰ-���͡�+����ʾ����st���롰sw���ֱ��ʾ֧������ڶ��ȣ���stc����ʾ֧�������ģ���swc����ʾ�ڶ������ģ� Ϊ��ײ��(cp)��֧��������(stc)��������rswc/cpΪ��ײ��(cp)���ڶ�������(swc)��������VstcΪ֧�������Ĵ����ٶȣ�VswcΪ�ڶ������Ĵ����ٶȣ�kΪ����i��j������i��j��ͼ1��ʾ��
Ϊ��ײ��(cp)��֧��������(stc)��������rswc/cpΪ��ײ��(cp)���ڶ�������(swc)��������VstcΪ֧�������Ĵ����ٶȣ�VswcΪ�ڶ������Ĵ����ٶȣ�kΪ����i��j������i��j��ͼ1��ʾ��
����������ϵͳ������ײ��cp�ĽǶ����غ��ʾΪ��
 (2)
(2)
��ײ��İڶ��ȹ����Źؽڵ�H�ĽǶ����غ㣬��ʾΪ��
 (3)
(3)
��ʽ(2)��(3)���ã�
 (4)
(4)
��ײ�����ȵĽ�ɫ���������У� ��
�� ��
��
3 �ȶ��Է����������Ż�
��Ա��ĵı������л����ˣ��ò���������ijһʱ�̵�״̬����ֵ ����ʾ�����������ڵĶ���ѧ���ԣ��ɽ���������������ϵͳת��Ϊ��ɢ����ѧϵͳ��ͨ����ʱ��ȡΪ���������ײ���˲�䣬���Ƹ�ʱ��״̬����ֵ���ڵĿռ�ΪPoincar���� ��[5,15]����ʱ�̰ڶ�����֧���ȴ���
����ʾ�����������ڵĶ���ѧ���ԣ��ɽ���������������ϵͳת��Ϊ��ɢ����ѧϵͳ��ͨ����ʱ��ȡΪ���������ײ���˲�䣬���Ƹ�ʱ��״̬����ֵ���ڵĿռ�ΪPoincar���� ��[5,15]����ʱ�̰ڶ�����֧���ȴ��� ���ι�ϵ����ˣ�������״̬������Ϊ
���ι�ϵ����ˣ�������״̬������Ϊ ��
�� ��
�� ������״̬����
������״̬���� ����vnΪ�����˲��е�n��ʱPoincar��������״̬����v��ֵ��Poincar��ӳ���Ǹ��ݵ�ǰ��״̬����vn������һ��״̬����vn+1��ӳ�䣬�����ʽSΪ��
����vnΪ�����˲��е�n��ʱPoincar��������״̬����v��ֵ��Poincar��ӳ���Ǹ��ݵ�ǰ��״̬����vn������һ��״̬����vn+1��ӳ�䣬�����ʽSΪ��
vn+1=S(vn) (5)
3.1 ���ڰ�ӳ�䷽����ȫ���ȶ��Է���
��Poincar������ռ��е��о�����Ϊ��������������ļ������ĵ���ƴ������������ͨ���Լ������ĵ����������Poincar��ӳ�䣬��n-1ά״̬�ռ仮�ֳɿ��а������벻���а����ϣ��������а���Ϊ�����˵IJ�̬�������а����ϵĴ�С���������˵�ȫ���ȶ���[13-14]�����ǵ��������ߵ��˶��ص㲢������ε���ֵ�������������ȷ��״̬�ռ䷶ΧΪ����1��[0��0.8] rad�� ��
�� (rad/-)�����ڿ��а����ϵĴ�С������������Ƴ�����[13-14]���ۺϿ�������ʱ������ľ��Ƚ�״̬�ռ仮��Ϊ50��50��30������
(rad/-)�����ڿ��а����ϵĴ�С������������Ƴ�����[13-14]���ۺϿ�������ʱ������ľ��Ƚ�״̬�ռ仮��Ϊ50��50��30������
�������е�����Բ�沽̬ģ�ͣ���ͬ������������϶Ի����˲�̬������������Ҫ��Ӱ�죬�����IJ��������Źؽڲ���(m2)���Ȳ���(r��c��J)�Լ�б�½ǶȦá�������ͬ��������µĶ�����㣬�ó����½��ۣ����Źؽ������仯ʱ��������뾶Ϊ0.3������λ��Ϊ0.15��ת������Ϊ0.02ʱ���Ի�ýϴ�IJ�̬���������������������£�б�½Ƕ�Ϊ0.001~0.03 rad֮��ʱ��������仯�����������������ط���������������������Źؽ��������ڲ�̬�������Ӱ�졣
���������ٻ�ģ�ͣ��� ʱ��ģ�Ϳ��Խ��Ƶ���Ϊ���ĵ���ģ�͡���һ�������Źؽ������������˵IJ�̬��������������仯�� ��������������Ȳ����������ʣ����Dz���m2=[0��1��2.5��5��100]ʱģ�͵IJ�̬������ı仯��ͼ2��ʾΪ��ͬ�Źؽ������Ա������л����˲�̬ȫ���ȶ��Ե�Ӱ�죬����ÿ1�ж�Ӧ�ڲ�ͬ���Źؽ���������1������4�зֱ��ʾ���������ά�ռ�����ڶ�ά�ռ��ϵ�ͶӰ����Ӧ�������Źؽ�������ģ�͵Ŀ��а���Ϊ[5 783��12 773��16 375��16 212��14 796 ]����ͼ2�ɼ��������Źؽ����������ӣ���̬������Χ�ı仯���������������а�����m2=0ʱ��5 783��Ϊm2=1ʱ��12 773�������Źؽ����������Ӳ�̬�������ø��Ӽ��У���m2��0����1ʱ�������˵����ĸ߶�Ѹ�����ӣ�ʹ�����˵IJ�̬������Ѹ������ͬʱ�������������������ӣ�ʹ�ڻ����˲�̬����ʱ��������ͨ��������ߵ�ij�ʼ���ܸ����һ���������������Ҳʹ��ײʱ�̵�������ʧ������ߵĹ�ͬ���õ�����������m2���������������һ������m2ʱ�������˵IJ�̬������û�������仯�����������������m2ȡֵ��2.5����ʱ��ģ�ʹﵽ���̬������
ʱ��ģ�Ϳ��Խ��Ƶ���Ϊ���ĵ���ģ�͡���һ�������Źؽ������������˵IJ�̬��������������仯�� ��������������Ȳ����������ʣ����Dz���m2=[0��1��2.5��5��100]ʱģ�͵IJ�̬������ı仯��ͼ2��ʾΪ��ͬ�Źؽ������Ա������л����˲�̬ȫ���ȶ��Ե�Ӱ�죬����ÿ1�ж�Ӧ�ڲ�ͬ���Źؽ���������1������4�зֱ��ʾ���������ά�ռ�����ڶ�ά�ռ��ϵ�ͶӰ����Ӧ�������Źؽ�������ģ�͵Ŀ��а���Ϊ[5 783��12 773��16 375��16 212��14 796 ]����ͼ2�ɼ��������Źؽ����������ӣ���̬������Χ�ı仯���������������а�����m2=0ʱ��5 783��Ϊm2=1ʱ��12 773�������Źؽ����������Ӳ�̬�������ø��Ӽ��У���m2��0����1ʱ�������˵����ĸ߶�Ѹ�����ӣ�ʹ�����˵IJ�̬������Ѹ������ͬʱ�������������������ӣ�ʹ�ڻ����˲�̬����ʱ��������ͨ��������ߵ�ij�ʼ���ܸ����һ���������������Ҳʹ��ײʱ�̵�������ʧ������ߵĹ�ͬ���õ�����������m2���������������һ������m2ʱ�������˵IJ�̬������û�������仯�����������������m2ȡֵ��2.5����ʱ��ģ�ʹﵽ���̬������
3.2 ����Newton-Raphson�����ľֲ��ȶ��Է���
ģ�;ֲ��ȶ��Է�������ȷ��ģ���Ƿ���ڲ������Լ������㴦�Ľ����ȶ��ԡ������˵ľֲ��ȶ��Կ���ͨ������������ֵ���֡�
ϵͳ��ǿ������ʹPoincar��ӳ��S�Ľ�����ʽ����ȷ��������Newton-Raphson��ֵ������⡣��ϵͳ���ڲ�����v*����������v*=S(v*)�����n��״̬������ֵΪvn������1��ӳ����Ϊvn+1=S(vn)��2��״̬�������?vn=vn+1-vn����vn+1��vn����1��̩��չ��Ϊ��
 (6)
(6)
���У� Ϊ�ſ˱Ⱦ���������ֵ��ģ�ǽ����ȶ��Է����Ĺؼ������ſ˱Ⱦ�������ֵ��ģ����Floquet���Ӿ�λ�ڵ�λԲ�ڣ���ÿһ����������С�������ڲ����㴦����ģ����1����̬��������ģ�����ս�ˤ������ˣ���ͨ���ſ˱Ⱦ��������ֵ�жϻ����˲�̬�������ȶ��ԣ����е�����ֵ�����ڵ�λԲ�ڣ�����ֵԽ�ӽ�0����̬�������ʾ�Խ�졣
Ϊ�ſ˱Ⱦ���������ֵ��ģ�ǽ����ȶ��Է����Ĺؼ������ſ˱Ⱦ�������ֵ��ģ����Floquet���Ӿ�λ�ڵ�λԲ�ڣ���ÿһ����������С�������ڲ����㴦����ģ����1����̬��������ģ�����ս�ˤ������ˣ���ͨ���ſ˱Ⱦ��������ֵ�жϻ����˲�̬�������ȶ��ԣ����е�����ֵ�����ڵ�λԲ�ڣ�����ֵԽ�ӽ�0����̬�������ʾ�Խ�졣

ͼ2 �Źؽ������Բ�̬�������Ӱ��
Fig.2 Effect of hip mass on basins of attraction
˫�㱻�����л������ȶ����ߵĶ���Դ����б���¶ȣ���ͬ��б���¶Ȼ�ʹ�û������ȶ����߲�̬����̬�����ٶ��нϴ�IJ�ͬ�������Բ����ú�m2��Ϊ�о��ο�����
��ͼ2�ɼ�����ʱ��Բ�沽̬ģ�Ϳ��Խ��Ƶ���Ϊ�ʵ�ʽ�����ģ�͡���ˣ���m2��ȡֵ��Χ����[0, 10] kg���õ�ȡֵ��Χ����(0, 0.1] rad��ͬʱ�����������ֵ��ģ���ڻ����1�IJ���������Ϊ���ȶ�����, Ϊ����ͼ���ʾ, ���ȶ������ģֵ��ȡΪ1��
ͼ3��ʾģ����б���¶����Źؽ�������ͬ�����, ��̬����ʱ�������ֵģ�ı仯�����Źؽ�����С��2.5ʱ��ģֵ���¶���������Ѹ�ٱ�С�����Լ�С�����Źؽ���������2.5ʱ��ģֵ���¶ȴ���0.075 radʱѸ������ģֵ���Źؽ������ı仯���¶ȵIJ�ͬ�����ڲ��졣���¶Ƚӽ�0 radʱ���������ṩ�����������Բ�����ײ��ʧ�������˴��ڲ��ȶ�����(ģֵΪ1)�����¶Ƚ�Сʱ��ģֵ���Źؽ����������������������ڵ��¶Ƚӽ���0 radʱ����Ȼģ�;����ȶ������߲�̬�����ǣ�����������Сʹ����ײʱ������ʧ��С�����������ģ�������ṩ�������϶࣬��ˣ���̬�����ٶȽ����������¶Ƚ�һ������ģ�Ͳ���Ѹ�ٱ����ײʱ������֮������Źؽ���������ģ�ͽ����и���������ٶȡ���ʵ�����Ե����¶ȱ仯���������Ŷ����������Ԥ��ģ����ܽ�����ģ����ijһ���������µIJ�̬�����ٶȣ���Ҫ���Ǿ����ܶ���¶ȷ�Χ����ͼ3��֪����m2=2.5 kgʱ�����¶�Ϊ[0.001, 0.1] rad�������ڣ�ģ�;��л���ȫ�ֿ��ǵ����������ٶȡ�

ͼ3 �Źؽ�������б���¶Ȳ�ͬ��϶��ȶ���̬�������ֵ��Ӱ��
Fig.3 Effect of different combinations with hip mass and slope on maximum value of eigenvalues of stable gait
�ı��������������ȳ����Ű뾶��ת�������ȣ����ж�η������, ���ģ�ͽṹ������ֵ�����Ż�����, ���1��ʾ��Ϊ������Proe�����й���ģ�ͣ���1�еIJ�����Ϊ����������ͬʱ���������۵IJ�����ʵ����Ʋ�������Ϊ����������
��1 ���ȵIJ�����б���¶�
Table 1 Parameters of each leg and the slope

4 ����Ŷ��»����˵IJ�̬³���Է���
4.1 Adams�������
4.1.1 ����Ŷ�������ģ���ȶ����߲�̬��Ӱ��
�Ի������ȶ��˶���̬����Ӱ�������Ŷ���Ҫ���Ե��������仯������Ϊ������ǰ����ײ������ƽ���¶Ȧõı仯[5,14]��
������������̬����ʱ���������䵽��һֵ��ʱ�����˽�����������̬���ش����, ���ֳ������˵�������Ŷ�����������ͼ4��֪��ͨ��б��·��߶ȸı�ɴﵽ�õ�ͻ�䣬������=��-�á�
��������·�����ƣ�����������˶������аڶ�������������ġ����ء����ݱ�1�еIJ�������Proe�й�����������˫�㱻���������˲�����Adams������У�ͨ�����߶ȵĵ���(��ɫ�IJ�ͬ)ʵ�ֵ��������仯����HΪAdams������±������л������������ܳ��ܵ����߶Ȳ����������Ŷ����ʦ�H��Ϊ����³���Ե�ָ�꣺��ֵԽ����³����Խ�ã�����̬������Խ����������Խǿ��

ͼ4 б��·��߶ȶ���ʾ��ͼ
Fig.4 Sketch of sharp change on floor of slope
ͼ5��ʾΪ�Źؽ�����m2=3 kg��·��߶Ȳh=2.5 mm ʱ˫�㱻��ģ����·�������ߵĹ��̡�Ϊ�Ϻ����ֱ������л������ڵ����Ŷ��µĻָ����̣�ʵ����ѡȡ�Ħ�h����H����ͼ6�ɼ�����ֵ������˲�̬���������ƫ����������������˲ȵ���1����ɫ���֮ǰ�������ȶ��ҵ�һ�����ڲ�̬���ȵ���1����ɫ������õ���ǰ���鰫��h=2.5 mm���ʱ���ģ�͵��ȶ������ܵ��ϴ��Ŷ�������2��������(��ͼ6��ʾ������1��2�ֱ�Ϊ֧������ڶ��ȵĽǶȱ�����1���2�ı仯����)����������ģ���ָֻ��ȶ���һ���������߲�̬���ɼ���ģ�;��н�ǿ�ĵ����Ŷ������������������˾��нϴ��ȫ���ȶ��ԡ�

ͼ5 �����Ŷ��±����������ȶ�����֤
Fig.5 Robustness analysis of robot walking under singular disturbance
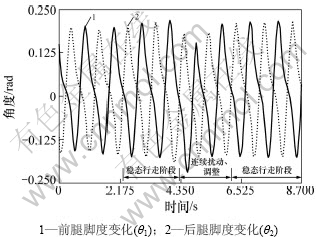
ͼ6 ��һ�Ŷ��±���������˫�ȽǶȱ仯����
Fig.6 Curves of angle of both legs of passive robot under single disturbance
��������ijЩ��������£����ܿ���ͨ�����θ߶ȲH�ϴ��·�棬����������˲�̬�ָ������ϲ�����˼�ʹͨ��2�θ߶Ȳ�ԶС�ڦ�H��·���Ի�ˤ����Ϊ��֤�����˲�̬�ָ�����������2���Ŷ�·�档ͬ�ϣ�Ϊ���ֻ�������2���Ŷ��µĻָ���������ѡȡ�Ħ�h��С�ڻ������������Ƶĵ������߶ȡ�
ͼ7��ʾΪ�Źؽ�����m2=3 kg������·��߶ȲH1=1.5 mm����H2=2.5 mmʱ�����������߹�����˫�ȽǶȱ仯����(����1��2�ֱ�Ϊ���Ӧ�Ƕȱ�����1���2)����ͼ7�ɿ����������������Ŷ��������Σ�����ģ��������2����ײʱ���ܵ��߶Ȳ�ֱ�Ϊ��H1=1.5 mm�ͦ�H2=2.5 mm�������Ŷ���������3С��������������ģ����Ѹ�ٻָ����ȶ���һ���������߲�̬���ɼ������Źؽ���������������ֵ��3����ʱ����ģ�;��н�ǿ�����Ŷ�����������

ͼ7 �����Ŷ��±���������˫�ȽǶȱ仯����
Fig.7 Curves of angle of both legs of passive robot under contours disturbances
4.1.2 �Źؽ������Ի�����³���Ե�Ӱ��
ͼ8��ʾΪ��ͬ�Ŷ����Źؽ��������ȶ��Ե�Ӱ�졣��ͼ8�ɼ������ڵ����Ŷ��������Źؽ���������ߣ�˫�㱻�����������ߵĿ�������������ǿ�ģ���˫�㱻���������ȶ����ߵ�³���������Źؽ����������Ӷ�������ߡ�����ʵ�����е��Ŷ�ǧ����𣬾��кܴ������ԡ������Ҫ��һ���о��������Ŷ��²�ͬ�Źؽ���������ģ�͵IJ�̬�ָ����������ȣ�ȡ����1���Ŷ��߶ȲH1Ϊ1.5mm��Ȼ�Բ�ͬ���Źؽ���������1�������������Ŷ����ɻ�øö�Ӧ�Ļ������ȶ��������ܳ��ܵĵ�2���Ŷ������߶ȲH2���뵥���Ŷ������������ͬ�������Ŷ��»����˵IJ�̬�ָ����������Źؽ�����������������Ȼ����٣���m2=3 kgʱ�ﵽ���ֵ����Σ��ĵ�1���Ŷ��ĸ߶Ȳ�ֵ��H1���Ի�û��������ܳ��ܵĵ�2���Ŷ������߶ȲH2��������η���ʵ�飬�ó����Źؽ����Ȳ�����������3����ʱ�������˾������IJ�̬�����ٶȣ�������ֵ�������Źؽ����Ȳ�������Ϊ2.5���ڲ����һ���������ֵ�����е�һϵ�м������£�Ϊʹ��ֵ������У�����ײ���̼�Ϊ˲ʱ��ɣ��Ұڶ�����֧���ȵĽ�ɫ����������ͬʱ����ײ��Ϊ��ȫ�ǵ�����ײ�������������������µ���ײ����˲ʱ��ȫ�ǵ��Եģ��ҵ�����������Ի����˵��˶���������ã�ʹ����ײʱ��е��������ʧ���Ӷ���Ҫ������Źؽ��������ﵽ����ȶ��ԡ���ˣ��ڲ����Ƕ�������ײ�����趨��ͬ������СӰ���£��������ͬ�Ľ��ۡ�

ͼ8 ��ͬ�Ŷ����Źؽ��������ȶ��Ե�Ӱ��
Fig.8 Effect of hip mass on stability under different disturbances
4.2 ����ʵ����֤
˫�㱻�����л����˵��ȶ����߶��˶��ij�ֵ�����У�ֻ�к��ʵij�ʼ�����ſ���ʹ�����ȶ����ߡ���ʼ����ֻ��ͨ����Ϊ�İڶ�ʵ�֣���ˣ�ÿ��ʵ����Ҫ���������Σ��Ի�ú����ij�ʼ���������IJ���ͳ��ѧ�ķ�������֤�Źؽ������Ա����������ȶ����ߵ�Ӱ�죺����ÿ�����ͨ��100�����ߵ�ʵ�飬ͳ���ܳɹ���������·��Ĵ��������ַ��������������ظ���ʵ�飬���Կ۵ط�ӳ�������������ߵ��ȶ�����³���ԡ���ͼ9��ʾ��

ͼ9 ��������������ʵ��
Fig.9 Experiment on walking of passive robot
����ģ�Ͳ��ò�������ģ��ã����Źؽ������������ٻ�m2=m2/m1����֪�Źؽڵ�����m2Ϊһ�������������ͨ���������ؿ�ı����������еȼ۵��ڡ�
���������Ļ�е�������2��ʾ��
��2 ��(��)���������ؿ�IJ�����б���¶�
Table 2 Parameters of and the slope

��ͬ�������Ի������ȶ�����Ӱ��ʵ����ͳ�����£�
m1=2.061 7 kg ʱ�ɹ�����·��67�Σ���ʧ��33������25����˳���ߵ���8����3 �������9����
m1=1.876 4 kg ʱ�ɹ�����·��79�Σ���ʧ��21������16����˳���ߵ���9����
�����������з��֣��ڻ������ȶ����߳ɹ��ʵ�Ӱ�������У�������������Źؼ����á�
�����˲���ͨ������·���ԭ��Ϊ��(1) �ṹ������⣺�Ų����Ƚϱ���ʹ�û���������ײʱ�ܵ������������½Ų���λ���ı��˻������˶�����Ӱ����һ��̬����ײ��(2) Ħ����ṹװ������ij�ͻ��Ϊ��֤���������˶�������Ħ����Ӱ�쾡��С��Ҫ���Źؽ����Ȳ���ϴ����м�϶���Ӷ�ʹ���Źؽ����Ȳ����Ӵ�������װ������»����˵ĽŲ���б���ϵĵ����ײ���ڽϴ������ԡ���ˣ���������m1���ٽ�Сʱ������������������С���Źؽڵ����������������ϵͳ�����ı�ߣ�ͬʱ����������������С��ʹ����ײʱ�ڶ����ܵ����淴���ó������С��Ҳ�ͼ�С�˽Ų���б���ϵ����ײ������ԣ���ˣ������˵��ȶ�����³���Խϴ���ǿ��
5 ����
(1) ���ڱ�������ԭ���������Źؽ���������˫������������ȶ�����³���Ե�Ӱ�졣
(2) ������Բ�沽̬ģ�͵��Źؽڼ��ʵ�, ʹ��ģ�ͽ�����������ⷽ�㡢���ڽ�ʾ�������˶��Ļ������ɡ�
(3) �Բ�ͬ�Źؽ�������ģ�ͽ���ȫ���ȶ��Է�������֪����������ʱ����̬�����������Ӻ��С����m2ȡֵ��2.5 kg����ʱ��ģ�ʹﵽ���̬������һ����ͨ���ֲ��ȶ��Է���������¶�Ϊ[0.001, 0.1] rad�������ڣ�m2=2.5 kgʱ��ģ�;��л���ȫ�ֿ��ǵ����������ٶȡ��Ӷ����ģ�͵ij�ʼ�����Ż����ã�m2=2.5 kg��J=0.005 kg��m2��c=0.075 m��r=0.15 m��l=0.5 m��������������ģ�͡�
(4) ͨ��������ģ�����������Ŷ��������Ŷ��²�̬�����仯�ķ������ó�����ģ�Ͳ������������ã�m2=3 kg��l3=0.15 m��c=0.075 m��r=0.15 m��l=0.5 m��J1=0.005 kg��m2����֤����ֵ�����й��ڻ������ȶ���̬��������ָ��ٶȵķ��������
(5) ����ʵ������������ͳ�ƹ��ɣ�ͨ����ʵ�����¡���ͬ���Źؽ�����˫��������ȶ����еijɹ��������ɹ��̶ȣ���һ��˵�����ʵ��Źؽ�������������������ߵ��ȶ�����³���ԡ�
�ο����ף�
[1] Winte D. Biomechanics and motor control of human movement[M]. Hoboken, NJ: John Wiley and Sons, 1990: 277-278.
[2] Collins S H, Ruina A. A bipedal walking robot with efficient and human-like gait[C]//Proc of 2005 IEEE Int Conf on Robotics and Automation (ICRA), Barcelona: IEEE, 2005: 1983-1988.
[3] McGeer T. Passive dynamic walking[J]. Intern Robot Res, 1990, 9(2): 62-82.
[4] McGeer T. Passive dynamic biped catalogue[C]//Chatila R, Hirzinger G, editors. Proc. Experimental Robotics II: The 2nd Inter-national Symposium. Berlin: Springer-Verlag, 1992: 465-490.
[5] Wisse M, Hobbelen D G E, Schwab A L. Adding an upper body to passive dynamic walking robots by means of a bisecting hip mechanism[J]. IEEE Transactions on Robotics, 2007, 23(1): 112-123.
[6] Collins S H, Ruina A, Tedrake R L, et al. Efficient bipedal robots based on passive-dynamic walkers[J]. Science, 2005, 307: 1082-1085.
[7] Garcia M, Chatterjee A, Ruina A, et al. The simplest walking model: stability, complexity, and scaling[J]. Journal of Biomechanical Engineering, 1998, 12(2): 281-288.
[8] Asano F, Luo Z W. On efficiency and optimality of asymmetric dynamic bipedal gait[C]//Proc 2009 IEEE Int. Conf. on Robotics and Automation, Kobe: IEEE, 2009, 1972-1977.
[9] HUANG Yan, Wang Qi-ning, XIE Guang-ming, et al. Optimal mass distribution for a passive dynamic biped with upper body considering speed, efficiency and stability[C]//Proc 2008 8th IEEE-RAS Int Conf on Humanoid Robots, Daejeon: IEEE, 2008, 515-520.
[10] Ruina A, Bertram J, Srinivasan M. A collisional point-mass model for the energetic cost of the down-to-up transition in legged locomotion: running, galloping and walking[J]. Journal of Theoretical Biology, 2005, 237(2): 170-192.
[11] Bertram J E A, Ruina A. Multiple walking speed- frequency relations are predicted by constrained optimization[J]. Journal of Theoretical Biology, 2001, 209(4): 445-453.
[12] Asano F, Luo Z W. The effect of semicircular feet on energy dissipation by heel-strike in dynamic biped locomotion[C]//Proc 2007 IEEE International Conference on Robotics and Automation. Harbin: IEEE, 2007: 3976-3981.
[13] LIU Ning, LI Jun-feng, WANG Tian-shu. The Effects of Parameter variation on the basins of attraction of passive walking models[C]//Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation. Harbin: IEEE, 2007: 1908-1913.
[14] Wisse M. Essentials of dynamic walking: Analysis and design of two-legged robots[D]. Delft: Delft University of Technology (Faculty of Mechanical Engineering), 2004: 31-71.
[15] ������, �����, ����ѫ��. ��������������ϵͳ��Ť������Է���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2009, 40(5): 1288-1293.
MENG Ling-qi, WU Hao-liang, WANG Jian-xun, et al. Non-linear twist vibration of main transmission system of vertical rolling mill[J]. Journal of Central South University: Science and Technology, 2009, 40(5): 1288-1293.
(�༭ ������)
�ո����ڣ�2011-06-05�������ڣ�2011-08-26
������Ŀ��������Ȼ��ѧ����������Ŀ(60905049)�������˼�����ϵͳ�����ص�ʵ����(��������ҵ��ѧ)��������(SKLRS200804C)
ͨ�����ߣ�������(1981-)���У��ӱ������ˣ���ʿ�о���������˫��������о����绰��0451-86413392��E-mail��wxgtreera@gmail.com

