基于Kalman滤波的弹性轨道上磁悬浮车辆控制方法
王辉,钟晓波,沈钢
(同济大学 铁道与城市轨道交通研究院,上海,201804)
摘要:为研究弹性轨道上磁悬浮列车的车轨耦合振动问题,以单磁铁-弹性轨道梁系统为对象,搭建单磁铁悬浮系统的车轨耦合振动数学模型,利用Kalman滤波器的状态估计功能,设计出2种状态反馈控制器,对比分析2种控制策略下悬浮系统的稳定特性。基于MATLAB/RTW及dSPACE系统搭建弹性梁磁悬浮实时控制试验台,验证考虑轨道弹性的控制策略的有效性。研究结果表明:若不计轨道梁的阻尼作用,不考虑轨道弹性的控制策略无法实现对磁悬浮系统的稳定控制,但在给定轨道梁阻尼的前提下,提高轨道梁刚度也可以使得系统稳定;考虑轨道弹性的控制方法,即使不计轨道梁的阻尼,也能够使系统在较低刚度的轨道梁上稳定悬浮。
关键词:Kalman滤波;磁悬浮;弹性轨道梁;车轨耦合振动;状态反馈
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2014)03-0965-08
Levitation control strategy for maglev on elastic track based on Kalman filter
WANG Hui, ZHONG Xiaobo, SHEN Gang
(Institute of Railway and Urban Mass Transit, Tongji University, Shanghai 201804, China)
Abstract: For the solution of the vehicle-guideway coupling vibration, taking the single magnet coupled with elastic track as the object, the numerical model of the vehicle-guideway coupling system was found. Two kinds of the state-feedback controllers were developed based on the Kalman filters, and their influences on the stability of the maglev system were investigated, respectively. A Real-time simulation platform for the elastic-track single magnetic levitation system was founded based on MATLAB/RTW and dSPACE, and the effectiveness of the latter control method was verified. The research results show that, if the track has no damping, the controller taking the track as a rigid body cannot make the maglev system steady, but a harder track stiffness enables the system with a certain track damping to stabilize; the control method considering the track’s flexibility can soundly maintain the system stable even the track has a relatively soft stiffness and no damping effect.
Key words: Kalman filter; maglev; elastic track; coupled vibration; state variable feedback
自20世纪70年代磁悬浮车辆诞生以来,其以平稳舒适、噪音低、转弯半径小、爬坡能力强等诸多优点[1-2],一直受到人们的关注和青睐。作为一种新型的公共交通工具,磁悬浮列车在城际高速和市内中低速交通中都有着广阔的应用和发展前景。悬浮控制系统是磁悬浮列车设计中的核心技术之一,而车轨耦合振动问题是目前该项技术中急需解决的一个关键问题[3-4]。同时,大量的悬浮控制工程实践表明,传感器信号的获取和滤波问题也是影响悬浮效果的重要因 素[5]。近年来,国内外学者对磁悬浮车辆车轨耦合振动问题进行了大量研究。Lee等[6]利用模态叠加的方法建立了轨道梁模型,考察了车辆运行速度、轨道不平度、轨道梁挠度、轨道梁跨距、轨道梁结构形式对悬浮间隙及动力放大系数的影响。王辉等[7]以单铁悬浮系统为研究对象,提出采用增益表控制法根据激扰及系统质量自动调节反馈增益参数,从而使系统具有更好的稳定性;Snyder[8]将磁浮轨道梁简化为Bernoulli-Euler梁建立车轨耦合模型,从而得到车轨耦合系统的动力学方程,在此基础上研究各种梁参数的变化、车轨质量比、悬浮刚度对系统动力学特性的影响。Jayawant等[9]指出了抑制轨道振动的2个方法,选择合适的系统阻尼及调节前向通道的滤波器; 方明霞等[10]采用LQG悬浮控制控制器做了仿真研究,以避免耦合振动。邓永权等[4]指出,当轨道频率接近于控制系统频率时,系统可能失稳。国内外的大量研究虽然使得人们对磁悬浮车辆车轨耦合振动问题有了进一步的了解,但并未从根本上将其解决,究其原因是因为这些研究均没有从轨道控制的角度对车轨耦合振动问题加以研究,因此无法抑制轨道振动,当轨道刚度或者系统阻尼较小时,系统就会失稳。德国的TR04型、日本的HSST04型以及美国的AMT磁悬浮列车在特定的线路段均发生过车轨耦合振动现象。工程应用中常常采取增大轨道梁质量及刚度的方法,以确保磁浮列车的稳定悬浮,然而这将导致磁浮线路的建设成本大幅提高。据统计,目前建成的磁浮线路中,轨道梁的造价约占磁浮系统总造价的60%~80%[11-12]。此外,悬浮系统的工作环境恶劣,控制系统中存在许多类型噪声,如白噪声、脉冲噪声、斩波器噪声等,其中以白噪声最为常见。当干扰噪声强度过大,势必影响列车的悬浮性能,因此必须采取一些滤波措施来降低系统的噪声水平。传统设计中采用的低通滤波器设计方法简单,但是其降噪能力有限,而且会产生一定的相位延时,影响系统的动态性能。Kalman滤波器是一种基于最优递归算法的滤波器[13-14],利用Kalman滤波器不仅能够完成信号的滤波,还可以进行系统状态的估计,得出状态反馈控制所需要的系统状态。针对磁悬浮车辆的车轨耦合系统,本文设计出Kalman滤波器,在降低系统干扰噪声的同时,估计出系统状态,进而将轨道梁的振动状态也引入控制系统,设计出全状态反馈的控制策略以期能够有效抑制车轨耦合振动现象,在满足磁悬浮列车稳定运行的同时,降低对轨道梁性能的要求,减少磁悬浮交通的建设成本。
1 系统数学模型的建立
磁悬浮车辆一般是由多个悬浮点支撑,但通过解耦,悬浮系统可以分解为单个悬浮磁铁的控制问题。所以单铁悬浮系统是磁悬浮系统的基本单元,分析单铁悬浮系统的动态模型和动态特性比分析多磁铁系统更具通用性[15]。因此,将磁悬浮车辆的车轨耦合系统简化为如图1所示的单铁-弹性轨道模型,以研究磁悬浮车辆在弹性轨道上静悬浮的控制稳定性问题。
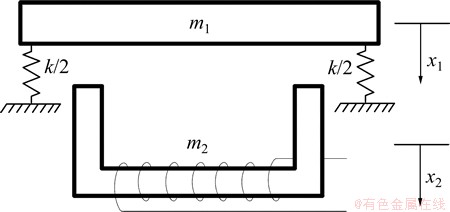
图1 车轨耦合物理模型示意图
Fig. 1 Vehicle-guideway coupling model
单铁悬浮系统的瞬间电磁悬浮力可表达为
 (1)
(1)
由式(1)可以看出:电磁力与悬浮间隙成非线性的反比关系,这正是开环电磁悬浮系统不稳定的本质原因。设某一悬浮间隙SN,电磁铁线圈中电流为IN时,电磁铁与轨道梁刚好处于平衡状态,将该点(IN, SN)视为平衡点,分别以此时轨道梁和磁铁的中心为原点建立坐标系,方向如图1所示。将式(1)在该点处线性化,可得:
 (2)
(2)
系统的力学方程可表达为
 (3)
(3)
 (4)
(4)
根据文献[16],得到电学方程:
 (5)
(5)
其中:R为电磁铁电阻;L和 分别为平衡点处的磁链电感和漏磁率;U为电磁铁两端电压。由式(2)和(4)可得:
分别为平衡点处的磁链电感和漏磁率;U为电磁铁两端电压。由式(2)和(4)可得:
 (6)
(6)
对式(6)两边求导后整理得到:
 (7)
(7)
选取x1, ,
, ,
, ,
, 作为状态变量,悬浮间隙及电磁铁垂向加速度作为系统的输出量,即
作为状态变量,悬浮间隙及电磁铁垂向加速度作为系统的输出量,即 ,则车轨耦合模型可用如下状态空间方程描述:
,则车轨耦合模型可用如下状态空间方程描述:

 (8)
(8)
其中:

2 弹性轨道梁磁悬浮控制系统开发及测试工作平台的搭建
半实物仿真又称硬件在环(Hardware-In-Loop, HIL)仿真,是将系统中的数学和物理模型、控制策略或实物联接起来一起进行实验。由于在回路中引入了实物,相比纯计算机仿真半实物仿真更接近实际系统,对实时性要求更符合实际情况,兼顾了物理仿真和数学仿真的共同优点。为研究各种控制方法的可行性性,采用dSPACE实时仿真系统搭建了弹性轨道梁磁悬浮控制系统开发及测试工作平台,该平台的主要构成及连接框图如图2所示。
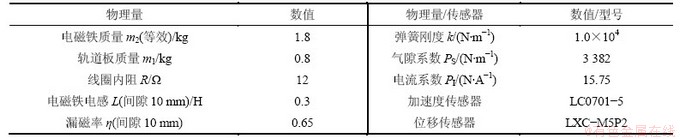
图2中,仿真控制计算机主要用于控制系统代码的编写、仿真结果的查看及数据的后处理等工作,由于dSPACE与MATLAB/Simulink之间采用无缝连接,描述控制系统的C 代码可以由Simulink 框图模型自动生成并下载到dSPACE硬件中;文章采用的dSPACE实时仿真系统使用DS1104处理器主板,配备有多组独立的16位A/D及D/A转换器,仿真开始后由该系统独立地完成信号的转换、数据的计算等工作;磁悬浮单铁台采用转臂式,如图3所示,转臂的一端固定电磁铁,另一端通过轴承与底座相连,当摆臂在小范围内摆转时,电磁铁的运动可视为竖直方向的直线运动;轨道板通过弹簧与支座相连,从而模拟轨道梁的弹性振动,通过选择不同刚度的弹簧,可以调节轨道梁的自振频率。表1中列出了工作平台的主要参数,其中气隙系数PS及电流系数PI通过实验的方法得到。
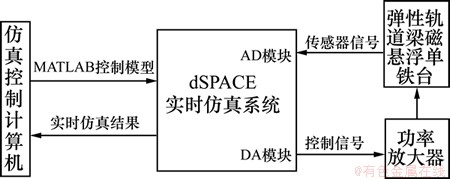
图2 弹性轨道梁磁悬浮控制系统开发及测试工作平台连接框图
Fig. 2 Diagram of R&D test rig for elastic-track magnetic levitation control system

图3 弹性轨道梁磁悬浮单铁台
Fig. 3 Test rig for elastic-track magnetic suspension system
表1 弹性梁磁浮试验台参数
Table 1 Parameters of the test rig
3 基于Kalman滤波器的控制器设计
Kalman滤波器是一种高效率的递归滤波器,当信号与噪声同时输入时,Kalman滤波器不仅能够有效地抑制噪声,将信号尽可能精确地重现出来,同时可以进行系统状态的最优估计[13]。因此本文作者利用Kalman滤波器估计出的磁悬浮系统状态,采用状态反馈的方法设计出控制律,对比分析不考虑轨道弹性的控制方法与考虑轨道弹性的控制方法对系统特性的影响。
3.1 Kalman滤波器的设计
以采样周期t0对系统进行离散化,并考虑系统的控制输出噪声和传感器测量噪声,离散化后的系统状态空间方程为

 (9)
(9)
其中:w(k)为一维的控制输出噪声,v(k)为间隙传感器和加速度传感器引入的测量噪声,

 ,
, 为系统矩阵A的特征根。
为系统矩阵A的特征根。
设输出噪声w(k)和传感器测量噪声v(k)为符合正太分布的白噪声,且相互独立,Q和R分别为二者的方差(矩阵), 和
和 分别为其均值(矢量),则Kalman递归公式为[13-14]:
分别为其均值(矢量),则Kalman递归公式为[13-14]:
 (10)
(10)
在MATLAB/Simulink中搭建Kalman的递归计算过程如图4所示。
3.2 不考虑轨道弹性的控制器设计
不考虑轨道弹性的控制器,即假定磁悬浮列车的悬浮过程中轨道梁不会产生任何振动,在控制器设计时被控对象被假定为3阶系统。Kalman滤波器设计时,以采样时间t=1.0×10-4 s对系统进行离散,将表1各数据代入,则式(9)中各矩阵为:


利用Kalman滤波器得到系统状态后,即可进行状态反馈控制率的设计,整个闭环系统的框图如图5所示。
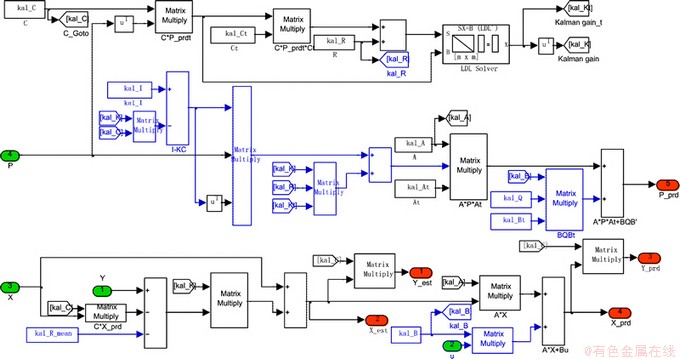
图4 MATLAB/Simulink中Kalman滤波器的实现
Fig. 4 Implement of Kalman filter in MATLAB/Simulink
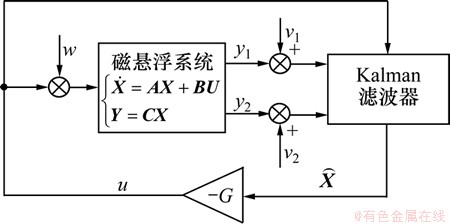
图5 基于Kalman滤波器的闭环控制系统
Fig. 5 Closed-loop MAGLEV system based on Kalman filter
图5中 ,向量中各元素分别表示利用Kalman滤波器估计到的电磁铁相对于平衡点的位移、速度、加速度;G为状态反馈系数矢量。选取最优控制器性能指标时,考虑了如下因素:代表行驶安全性的电磁铁位移
,向量中各元素分别表示利用Kalman滤波器估计到的电磁铁相对于平衡点的位移、速度、加速度;G为状态反馈系数矢量。选取最优控制器性能指标时,考虑了如下因素:代表行驶安全性的电磁铁位移 ,代表乘坐舒适性的电磁铁加速度
,代表乘坐舒适性的电磁铁加速度 及代表控制能量大小的电磁铁电压U,因此目标函数可表达为如下形式:
及代表控制能量大小的电磁铁电压U,因此目标函数可表达为如下形式:
 (11)
(11)
式中:q1,q2及r分别为相应项的加权系数。由最优控制理论可知,若反馈控制率满足式(12)则性能指数J为最小,其中L为Riccati方程(13)的解。
 (12)
(12)
 (13)
(13)
计算得到 。取干扰噪声均为均值为0的白噪声,对应方差分别为
。取干扰噪声均为均值为0的白噪声,对应方差分别为 ,
, ,其中r1=0.02 mm2,r2=0.01 m2/s4,并设定电磁铁初始位置偏离平衡点3.3 mm(若无特别说明,文中余下仿真分析均作相同设置),计算得到电磁铁悬浮间隙的响应如图6所示。由图6可知:该控制方法下系统不稳定。为从根本上分析系统失稳的原因,假定Kalman滤波器能够无偏差地估计出系统状态,且系统无任何干扰噪声,则闭环系统的系统矩阵可表示为:
,其中r1=0.02 mm2,r2=0.01 m2/s4,并设定电磁铁初始位置偏离平衡点3.3 mm(若无特别说明,文中余下仿真分析均作相同设置),计算得到电磁铁悬浮间隙的响应如图6所示。由图6可知:该控制方法下系统不稳定。为从根本上分析系统失稳的原因,假定Kalman滤波器能够无偏差地估计出系统状态,且系统无任何干扰噪声,则闭环系统的系统矩阵可表示为:
 (14)
(14)
式中: 。改变轨道梁刚度,使其自振频率在1~100 Hz之间变化,计算出不同频率时系统矩阵Ar的特征根,进而得到不同频率时系统矩阵特征根实部的最大值,其变化规律如图7所示。由图7可知:随着轨道梁自振频率增加,亦即其刚度的增大,系统矩阵特征根实部的最大值逐渐减小并趋于0,但总是大于0,系统不稳定。
。改变轨道梁刚度,使其自振频率在1~100 Hz之间变化,计算出不同频率时系统矩阵Ar的特征根,进而得到不同频率时系统矩阵特征根实部的最大值,其变化规律如图7所示。由图7可知:随着轨道梁自振频率增加,亦即其刚度的增大,系统矩阵特征根实部的最大值逐渐减小并趋于0,但总是大于0,系统不稳定。

图6 电磁铁悬浮间隙的响应
Fig. 6 Levitation gap of magnet
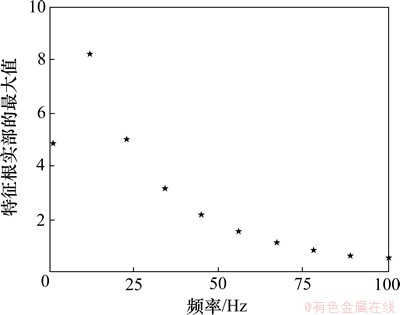
图7 特征根实部的最大值随轨道梁自振频率的变化
Fig. 7 Maximum of real part vs. natural frequency of track
上述的计算中忽略了轨道梁的阻尼作用,然而实际的磁悬浮线路中轨道梁总是存在一定的阻尼,当轨道梁的刚度较大时系统也可能稳定,对此本文作如下了证明。若考虑轨道梁的阻尼作用,式(3)变为如下形式:
 (15)
(15)
系统矩阵作相应更改即可,此处不再累述。考察一定的轨道梁阻尼下,系统矩阵Ar特征根实部的最大值随其自振频率的变化,结果如图8所示。由图8可以看出:随着轨道梁刚度的增大,特征根实部的最大值逐渐减小,并变为负值,系统趋于稳定。这也是磁浮线路建设中尽量增大轨道梁刚度的主要原因。设定阻尼c=50 N・s/m,其他参数如表1所示,电磁铁悬浮间隙的响应如图9所示。由图9可以看出,在一定的干扰噪声水平下(, ),系统能够在0.65 s左右达到稳定状态,最大超调量为10.6%。
),系统能够在0.65 s左右达到稳定状态,最大超调量为10.6%。

图8 特征根实部的最大值随轨道梁自振频率的变化
Fig. 8 Maximum of real part vs. natural frequency of track
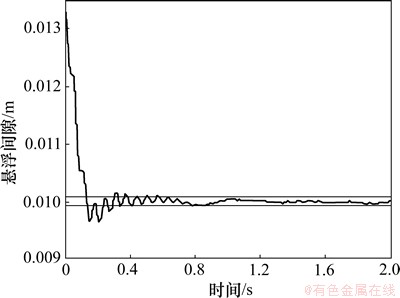
图9 电磁铁悬浮间隙的响应
Fig. 9 Levitation gap of magnet
3.3 考虑轨道弹性的控制器设计
通过上述推导及仿真结果可以看出:若不计轨道梁的阻尼作用,不考虑轨道弹性的状态反馈控制方法无法实现对磁悬浮系统的稳定控制;虽然实际工程中磁悬浮线路的轨道梁具有一定的阻尼,为确保磁悬浮车辆的稳定运行,必须以提高轨道梁刚度、增加工程造价为代价。
上述的控制方法以电磁铁的振动速度、加速度以及悬浮间隙为反馈量进行主动控制,可见,3个反馈量中仅悬浮间隙部分地反映了弹性轨道梁的振动状态。作为磁悬浮系统重要组成部分的轨道梁,其振动状态并未完全引入控制系统,这就是假设轨道梁为刚性时设计出的控制器难以使系统稳定的根本原因。为此,本文利用Kalman滤波器,将反映轨道振动状态的变量也引入控制系统,进行控制器的设计。以采样时间t=1.0×10-4 s对系统进行离散,将表(1)各数据代入,则式(9)中各矩阵为


因此在图4所示的闭环系统中,利用Kalman滤波器获取的状态变量有5个,设计反馈控制规律如下:
 (16)
(16)
其中,矢量 中各元素分别为利用Kalman滤波器得到的轨道梁垂向位移、速度以及磁铁相对于平衡点的位移、速度、加速度;G为控制器的反馈系数矢量,根据线性二次型最优方法得到反馈矢量
中各元素分别为利用Kalman滤波器得到的轨道梁垂向位移、速度以及磁铁相对于平衡点的位移、速度、加速度;G为控制器的反馈系数矢量,根据线性二次型最优方法得到反馈矢量 ,计算方法与上述相同,此处不再累述。
,计算方法与上述相同,此处不再累述。
设定电磁铁初始位置偏离平衡点3.3 mm,得到电磁铁悬浮间隙及轨道板的位移响应曲线如图10和11所示。由图10可知:系统调节时间为0.13 s,最大超调量为1.8%,干扰噪声得到较好的抑制,计算结果证明了控制策略的有效性。
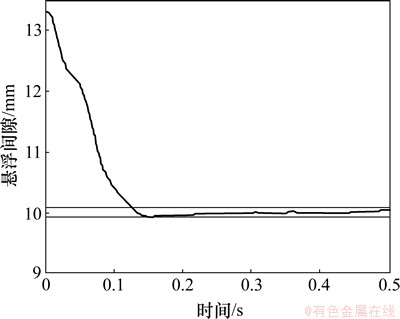
图10 电磁铁悬浮间隙的响应
Fig. 10 Levitation gap of magnet
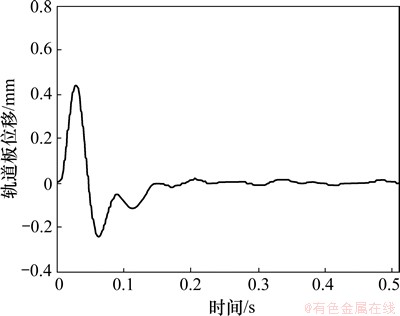
图11 轨道板位移响应
Fig. 11 Displacement of track
3.4 考虑轨道弹性的控制策略试验台验证
在弹性轨道梁磁悬浮实时控制试验台上,对考虑轨道梁弹性的控制策略的有效性进行验证。经测量,试验台所采用的间隙传感器和加速度传感器的噪声可以分别等效为方差为0.003 2 mm2和0.03 m2/s4的白噪声,控制器输出噪声方差为0.1V2。试验台测试结果如图12所示。
由图12可以看出:电磁铁在0.3 s左右即可达到稳定状态,在持续的系统噪声作用下,悬浮间隙无明显抖动,加速度在±0.15 m/s2范围内波动,干扰噪声得到了有效的抑制;与试验结果相比,仿真结果中加速度瞬态响应较为剧烈,但稳定时间有所缩短,如图13所示。考虑到参数误差及数学模型的简化等原因,仿真结果与试验结果具有较高的一致性,说明仿真模型准确,同时验证了控制策略的有效性。
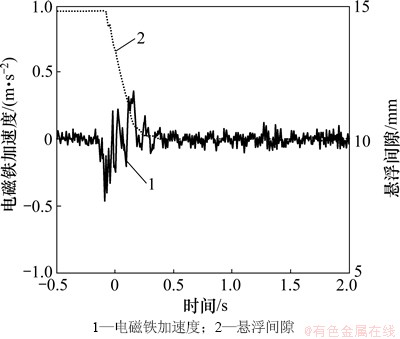
图12 电磁铁悬浮间隙响应(试验台测试结果)
Fig. 12 Responses of magnet acceleration and levitation gap (results on the test rig)
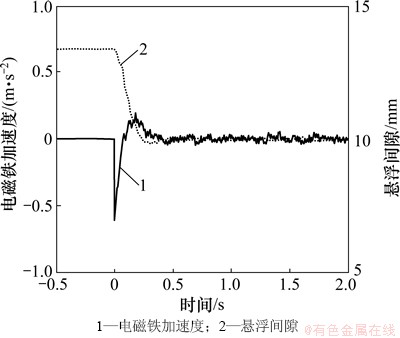
图13 电磁铁加速度及悬浮间隙响应(仿真结果)
Fig. 13 Responses of magnet acceleration and levitation gap (simulation results)
4 结论
(1) Kalman滤波器能够有效地抑制系统噪声,准确估计出系统状态,并应用于状态反馈控制器的设计。
(2) 若不计轨道梁的阻尼作用,不考虑轨道弹性的控制策略无法实现对磁悬浮系统的稳定控制,虽然工程中磁悬浮线路的轨道梁具有一定的阻尼,提高轨道梁刚度也可以使得悬浮车辆稳定运行,但会增加工程造价。
(3) 考虑轨道弹性的控制方法将轨道梁的振动状态引入了控制系统,即使不计轨道梁的阻尼,也能够使电磁铁在较低刚度的轨道梁上稳定悬浮,运用该控制方法,可降低对轨道梁的性能要求,从而减少磁悬浮交通的建设成本。
参考文献:
[1] 吴祥明. 磁浮列车[M]. 上海: 上海科学技术出版, 2003: 25-46.
WU Xiangming. Maglev train[M]. Shanghai: Shanghai Science and Technology Press, 2003: 25-46.
[2] Lee H W, Kim K C, Lee J. Review of maglev train technologies[J]. IEEE Transactions on Magnetics, 2006, 42(7): 1917-1925.
[3] 施小红. 常导高速磁浮列车车轨耦合非线性动力学问题研究[D]. 长沙: 国防科技大学机械工程与自动化学院, 2005: 4-13.
SHI Xiaohong. Research on the guideway-vehicle coupling nonlinear dynamic problems of the EMS high-speed maglev[D]. Changsha: National University of Defense Technology. College of Mechanics Engineering and Automation, 2005: 4-13.
[4] 邓永权, 罗世辉. 单磁铁系统的稳定性与仿真分析[J]. 电力机车与城轨车辆, 2005, 28(5): 44-46.
DENG Yongquan, LUO Shihui. Stability research and simulation of a single magnetic system[J]. Electric Locomotives & Mass Transit Vehicles, 2005, 28(5): 44-46.
[5] 李晓龙, 张志洲, 佘龙华, 等. 基于卡尔曼滤波的磁浮列车悬浮控制算法研究[J]. 系统仿真学报, 2009, 21(1): 216-219.
LI Xiaolong, ZHANG Zhizhou, SHE Longhua, et al. Kalman filter based suspension control algorithm for MAGLEV[J]. Journal of System Simulation, 2009, 21(1): 216-219.
[6] Lee J S, Kwon S D, Kim M Y, et al. A parametric study on the dynamics of urban transit maglev vehicle running on flexible guideway bridges[J]. Journal of Sound and Vibration, 2009, 328: 301-317.
[7] 王辉, 钟晓波, 沈钢. 一种新型磁悬浮线路设计方案及悬浮控制方法[J]. 同济大学学报(自然科学版), 2013, 41(7): 1112-1118.
WANG Hui, ZHONG Xiaobo, SHEN Gang. A new maglev line system design and control strategy[J]. Journal of Tongji University (Natural Science). 2013, 41(7): 1112-1118.
[8] Snyder J E. Dynamic interactions between vehicles and elevated, flexible randomly irregular guideways[J]. Journal of Dynamic System Measurement and Control, 1977, 99(1): 23-33.
[9] Jayawant B V, Sinha P K. Low-speed vehicle dynamics and ride quality using controlled DC electromagnets[J]. Automatica, 1977, 13(8): 605-610.
[10] 方明霞, 屠娟, 冯奇, 等. 弹性车行道上磁悬浮列车系统的动力学研究[J]. 噪声与振动控制, 2001, 21(6): 23-26.
FANG Mingxia, TU Juan, FENG Qi, et al. Dynamics research of maglev train on elastic guideway[J]. Noise and Vibration Control, 2001, 21(6): 23-26.
[11] 翟婉明, 赵春发. 磁浮车辆/轨道系统动力学(Ⅰ): 磁/轨相互作用及稳定性[J]. 机械工程学报, 2005, 41(7): 1-10.
ZHAI Wanming, ZHAO Chunfa. Dynamics of maglev vehicle/guideway system (Ⅰ): Magnet/rail interaction and system stability[J]. Chinese Journal of Mechanical Engineering, 2005, 41(7): 1-10.
[12] 陶兴. 中低速磁悬浮轨道梁关键设计参数研究[D]. 上海: 同济大学土木工程学院, 2008: 16-17.
TAO Xing. Research on the low-speed magnetic levitation rail beam key design parameters[D]. Shanghai: Tongji University. College of Civil Engineering, 2008: 16-17.
[13] 蒋志凯. 数字滤波与卡尔曼滤波[M]. 北京: 中国科学技术出版社, 1993: 174-243.
JIANG Zhikai. Digital filtering and Kalman filtering[M]. Beijing: China Science and Technology Press, 1993: 174-243.
[14] 邓自立. 卡尔曼滤波与维纳滤波[M]. 哈尔滨: 哈尔滨工业大学出版社, 2001: 139-238.
DENG Zili. Kalman filtering and wiener filtering[M]. Harbin: Harbin Institute of Technology Press, 2001: 139-238.
[15] 佘龙华, 柳贵东. 单铁磁悬浮控制系统的动力学特性研究[J]. 电力机车与城轨车辆, 2006, 29(3): 7-19.
SHE Longhua, LIU Guidong. Research on dynamics characteristic of single magnetic levitation control system[J]. Electric Locomotives & Mass Transit Vehicles, 2006, 29(3): 7-19.
[16] 张思远. 磁悬浮数字控制技术[D]. 上海: 同济大学汽车学院, 2009: 6-10.
ZHANG Siyuan. The design of digital control method for maglev[D]. Shanghai: Tongji University. College of Automotive Engineering, 2009: 6-10.
(编辑 陈爱华)
收稿日期:2013-03-12;修回日期:2013-07-20
基金项目:国家科技支撑计划项目(115-04-CL-047)
通信作者:王辉(1983-),男,河南沈丘人,博士研究生,从事磁悬浮控制及车辆动力学的研究;电话:18801962427;E-mail: wh053@163.com

