DOI�� 10.11817/j.issn.1672-7207.2020.01.005
���������˶������Ļ������ֽ�ģ����
�Ƶt1, 2,�����1, 2,�ƽ�Ԫ1, 2
��1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
ժҪ:���ǵ���װ�������ռ伸����������,�Ի������ֵ����β��������������������ӹ�����Ϊ��������������������Ϊ���Ŀ�꣬ʹ��MATLAB�����������������̣�����Newton���������г��������������CATIA�й���⻬�ݲ������ʵ����в������㣻���һ���µĻ��������˶�����Ļ������ֳ�����ά��ģ��������ͨ������1�Ի������ָ�ʵ��ģ������֤���о��������������ķ����ܿ�����ɳ������������Ϻ�ij��澫�ȵõ������ߡ�
�ؼ���:�������֣�����������������˶������ά��ģ
��ͼ�����:TH132.421 ���ױ�־��:A
���±��:1672-7207��2020��01-0033-08
General modeling method of spiral bevel gear based on universal motion parameters
TANG��Yi1, 2, HE��Yuhui1, 2, TANG��Jinyuan1, 2
(1. School of Mechanical and Electrical Engineering, Central South University�� Changsha 410083, China��
2. State Key Laboratory of High Performance Complex Manufacturing, Central South University��Changsha 410083, China)
Abstract: Considering the influence of factors such as installation errors, machine tool spatial geometric errors, etc, and taking geometric parameters of the tool�� blank parametes and machine-tool settings as input parameters, the tooth error was considered as an evaluation index. The parametric equations was calculated using Newton's method. Then, the three-dimensional model was generated by Boolean operation of the smooth cogging and the blank in CATIA. A new general modeling method of spiral bevel gear was constructed. The results show that the mathematical tooth surface model can be accurately and efficiently established and the precision of the tooth surface is greatly improved.
Key words: spiral bevel gear; mathematical tooth surface��universal motion concept(UMC); 3D modeling
���ִ�����е����ҵ���������������պͻ����У�������������ռ����Ҫ��λ�����ڳ��漸����״�ĸ����Ժ������ԣ��������ֲ�����ͳһ���ij������������������ֵij��ơ��ӹ��������ӹ��������ӹ����ն����в�ͬ�����ж��ַ��ʽ�����簴�ճݸ߷��࣬�ɷ�Ϊ�ȸ߳����֡����������ֺ�˫�����������֣������ӹ��������࣬�ַ�Ϊ���ֻ�����еʽҡ̨�����������������ػ�����������ͬ�����Ӧ�Ļ����ӹ�����Ҳ��ͬ�����磬�ڴ�ͳ��GLEASON��еʽҡ̨����No.116�ϼӹ���һ������嵶���������ִּӹ�+���־��ӹ���С�ִּӹ�+С�ְ��澫��+С���澫�С�һֱ���������潨ģ��������ijһ��ӹ�������(��SGM��HGM��)��ijһ��ӹ��������мӹ����̷���ģ��[1]���ӹ����������ӹ����շ����ı䣬����Ҫ������Ը��Ӽӹ����̽��н�ģ��������̸��ӣ���ģЧ�ʵͣ�ͨ���Բ����ͻ�ƴ�ͳ��ģ�� ���ڻ���������Ƶ������˶�����(UMC)������˻��������˶�������ͨ�ý�ģ���������У�UMC����ģ����������ؼӹ�������ͳҡ̨�������ᡰ���ػ������һ�ֻ���ģ�ͣ�����ʵ�ִ�ͳ�����Ĺ��ܣ��������á����ػ����������˶�������ʵ����Ӧ�ij��������������ͨ�üӹ������ij��潨ģ�У�ͨ��8��ͨ�ò�������ת���������еʽ�ӹ������ĵ�����������������������������ӹ�������ͨ��ͳһ����ģ�⡣Ŀǰ���й�UMC��ģ���о��Ƚ��٣�GONZALEZ-PEREZ��[2-3]����˸��Ƴ���Ӵ����Եij����ۺϷ��������������ۺ��Ż�����ѧģ�ͣ���Ը��������˶����ȵ�Ӱ����н���������ARTONI��[4]�������˶���������˲�������û�н��л���UMC��ģ���о���FAN[5-6]���UMC�Ļ�������Ի������ֽ����˽�ģ����棬���Ƶ���һ��������ڳ���������任��ϵ���ƽ�Ԫ��[7-12]�ڻ������ֵ�ͨ�û���ƺͼӹ���������˴����о��������漰�������ֻ��ڸ��ֵ������Ľ�ģ��TCA��LTCA������Ϊ���漸�ξ�ȷ��ģ���»�����LIN��[13-14]�о���ͨ�üӹ��������еʽ��������֮��ĵ�Чת����ϵ�����������������о���û�и������������˶������Ļ�������ͨ�ý�ģ���������������һ��������о����������������˶������Ļ�������ͨ�ý�ģ������ͨ����ؼ���ʵ���Է���������֤��
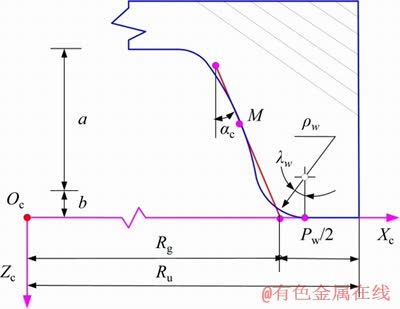
ͼ1���������͵�����״
Fig. 1��Type tool shape of parabolic-profile
1 ����ͨ����ѧģ��
����ȷ����ͨ�û����ӹ�����������ʵ����ӹ�����ģ������������������������ԭ���ķ��̣���ɳ�����ѧ��ģ��������ֵ��ⷽ����ɳ�������ɢ�����õ��������ʵģ�͡�
1.1�����߽�ģ
�������ֽ�ģ��Դ��ʵ�ʳ��ּӹ����̵ķ���ģ��[4]��ͨ����ֵģ����빤���ļӹ��˶��켣�����һϵ�в�ͬʱ�̵ĵ�������ء������ɵ��߹켣�������������ɣ���õ�ÿһ�������ض�����������϶��������ɵ��������켣������ɵij������������Ϊ
 (1)
(1)
ʽ�У���=(��, ��, ��)Ϊ������Ʋ���[15]���������̵��ߵļ��β��� (��, ��) �ͻ����˶����������գ��� Ϊ���߸߶ȷ���ı�������Ϊ������ת�Ƕȡ��÷��������Ҫ�������̵������(�뼸�β���(��, ��)�й�)�ͻ����˶����(���ɦձ�ʾ�Ļ����ӹ������й�)��
���̵��������Ҫ����3�����ͣ�ֱ���͡��������ͺ�Top-Rem�͡�����UMC��ģ�У��������͵�����ͼ1��ʾ����Ϊ2�����֡�
1) �϶�Բ�����ֲ��������̣�
 (2)
(2)

 (3)
(3)
2) �¶�Բ�����ֲ��������̣�
 (4)
(4)
ʽ�У�RcΪ��λ��뾶����gΪ�����߶���λ�ò�����acΪ������ϵ������cΪѹ���ǣ���wΪ���̱�Ե�뾶����wΪ���̱�ԵԲ���Ƕȣ�XwΪOc��C������߳��ȣ���+���͡������ֱ�Ϊ���ּӹ��İ�����档
1.2�����ڵ���չ���˶��ij���ͨ����ѧģ��
ͼ2��ʾΪ����UMC�Ļ����˶���ϵ�������á�����Gleason��˾���������˶�������������[9]������չ��ģ��[13]����UMC����UGM����У���8�������˶�����[16]���ֱ��ǵ�λSr����ֱ��λEM��ˮƽ��λXD����λXB������װ�Ǧ�m������ǧҡ���ת�Ǧκͻ���ҡ̨�Ǧգ���

 (5)
(5)
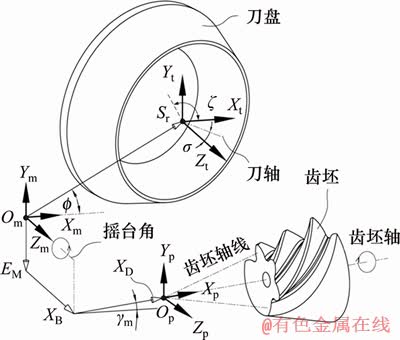
ͼ2������UMC�Ļ����˶���ϵ��������
Fig. 2��Parameter setting of UMC-based machine motion relationship
���Ǹ��Կ��Ա�ʾΪ������������˶������� �ĸ߽���ʽ���������磬��λXB�Ϳ��Ա�ʾΪ

 (6)
(6)
ʽ�У�XBk (k=0,  , n)��ʾ��k���˶�ϵ�������������˶������Ϳ��Ա�ʾ�ӳ��������̵����������˶�����������ת����ϵMbc����
, n)��ʾ��k���˶�ϵ�������������˶������Ϳ��Ա�ʾ�ӳ��������̵����������˶�����������ת����ϵMbc����
 (7)
(7)
����

��ˣ�չ�ɳ���ɱ�ʾΪ
 (8)
(8)
���ڳ������ɵ��߹켣�����ߴذ�����ɣ��ʻ�õ�ÿһ�������p*=F(��*)�ض�����������϶���[9]���ɵ�
 (9)
(9)
ʽ�У�nbΪ����ķ���ʸ������vbcΪ�ӹ������е��������������ٶȡ�����ʽ(8)��(9)������ɳ��淽�̵���ʽ�����Ȼ���÷������У�����3��δ֪������2���������̣����к�ǿ�ķ����Ժ����ԣ�ͨ���о���Ч�ʵ���ֵ��ⷽ�������������չ�ɰ��������ֵ�㡣
2 ������ɢ��������ʵ��
2.1��������ɢ������
ͨ��������ɢ��������۳�������㣬�Ա���ʵ�ʼӹ����ֲ�������жԱȡ��ڳ��潨ģ���Ѿ�֤����������������̵ķ����Ժ����Ե��³��治������ʾ��ʽ��ʾ��������
 (10)
(10)
ֻ�ܽ��г�����ɢ�������⡣ͨ����ɢ����1��δ֪���������������2���������ɵľ�ȷ���淽�̣�ƥ������ij���ȷ־��Ȼ�����[17-18]����ǰ�桢���桢�������ΪԼ���߽��������Ϳ�����ɳ���������ɢ���̡�
2.2�����潨ģʵ��
��������Ľ�ģ��������������˶������8�������˶��������Ƶ�����Գ������˶��켣����ɶ����л������ֵIJ�������ģ��������������ͬ�Ļ������ָ������ӹ����������������ɷֱ�õ����ɵij�����ɢ�����꣬��ֱ�����ó�����ɢ�㽨�����������棬��CATIA�й�����Ӧ��ʵ��ģ�͡�
2.2.1�����潨ģ��
���IJ���Gleason No.116����HFT������˫�淨�ӹ��Ļ������ָ�������Ʋ�������Ҫ����������Ʋ����ͻ����ӹ���������Ҫǿ�����ǣ�����UMC���壬ԭ�����㷨(Tilt )�������ӹ���11�������ӹ��������˱������������˶������⣬����ѹ���Ǧ�c�͵���ƫ�ĽǦ�c��������ת���������˶����������ݱ����ṩ��ͨ�ò�������ģ�������ɽ����������ѧģ�ͣ�����ɳ������ɢ�����
)�������ӹ���11�������ӹ��������˱������������˶������⣬����ѹ���Ǧ�c�͵���ƫ�ĽǦ�c��������ת���������˶����������ݱ����ṩ��ͨ�ò�������ģ�������ɽ����������ѧģ�ͣ�����ɳ������ɢ�����
2.2.2��������
���ڻ������ָ��ļӹ����շ��ӣ�����ѡȡ���е���Ҫ�ӹ�����ϳ�ݼӹ�����ɳ�����άʵ�彨ģ���ڻ������ֵij������Ϸ����������У����벻ͬ��ֵ�������˶���������MATLAB������ɻ��һϵ�о��ȷֲ�����ɢ����㡣��1��ʾΪ������������2��ʾΪ�����ӹ�������
��1����������
Table 1��Blank parameters

��2�������ӹ�����
Table 2��Machine-tool settings

���ݸ����ij�������������ӹ�����������ɳ��淽�̵��Ƶ����������ɷֲ��ij�����ɢ�����꣬��˵�����ǣ����ڽ����ij��淽�̾��з����ԣ�����ֱ���Ƶ�����ʾ�ij��淽�̱���ʽ��ֻ�ܽ�����������������������ʾ����ɢ���ĵ㣬���в��õ���9��15�������ֲ���ʽ����ͼ3��ʾ��
��������IJ�������ģ���������ŵ����ڣ���Gleason��������ɢ���cage�������ƣ������һϵ���й��ɡ���˳�ij���㣬�����ں�������ʵ�彨ģ�������֮��ļ�����Ϊ���ƣ��������ܶȿɸ��ݳ��������Ϊ�趨��
2.3����������ʵ�彨ģ
����Matlab���ij��ָ��ij�����ɢ�㷴ӳ������������õij����˳�Ժ������ԣ���Ϊ��������������������������Ӵ�����(TCA)�ȹؼ������ṩ��ȷ����ģ�ͺͻ���������Ϣ���ڻ���������ά��ģ�����У�������ɢ�����������ܳ�����������ɢ�ҵ㣬�ҳ����ֲ�Խ�ܼ����õ���ģ�;���Խ�ߡ�ͼ4��ʾΪ���ָ���CATIA�е�ʵ��ģ�ͣ�����õ���ɢ��������굼��CATIA�У��ɵ㹹�ߣ����߹��棬�ֱ��컡�����ֵİ������棬����ݸ�Բ���ཻ�������ɵõ�1���ݲ�ģ�ͣ�����ɳݲ������ʵ����в������㣬���ɵõ�����������ά��ģ��
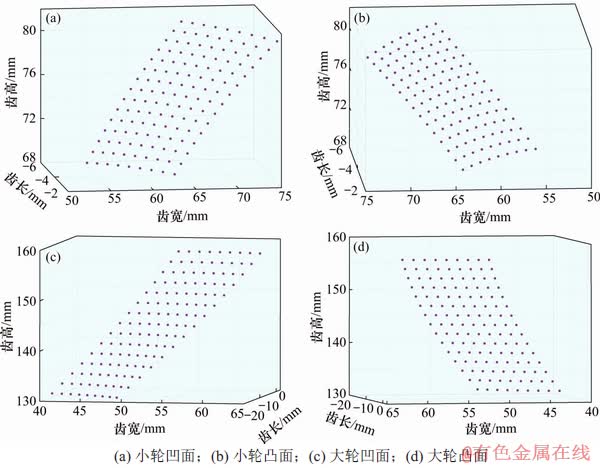
ͼ3����ɢ�������
Fig. 3��Discretized tooth surface points
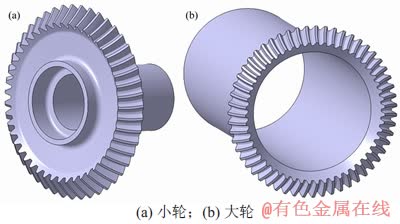
ͼ4�����ָ���CATIA�е�ʵ��ģ��
Fig. 4��Physical model of bevel gear pair in CATIA
3 �������������������
3.1���������ľ�ȷ����
��ʵ�ʼӹ������У��ܶ���������װ�䡢�����˶����ȴ������κ�ĥ���װ�е�Ӱ�죬ʵ�ʼӹ��������ʵ���������۳������һ��ƫ��ڻ������ֵij�������У������䷨��ƫ��Ϊ�������ò���������ʾ����Ŀǰ��ʵ�ʲ����У��ܶ˾��ר�ŵij��ֲ����ǣ��䱸רҵ����������G-AGETM��KOMET�ȣ���ɳ���ľ�ȷ�Զ����������IJ���CMMs��ȷ�����������ֵij�����CMMs�����ͺ�Ϊ1500GMM�������ο���ΪHB0��1992��1998��ͼ5��ʾΪ���ָ���ʵ�ʼӹ��������CMM����ʵ����
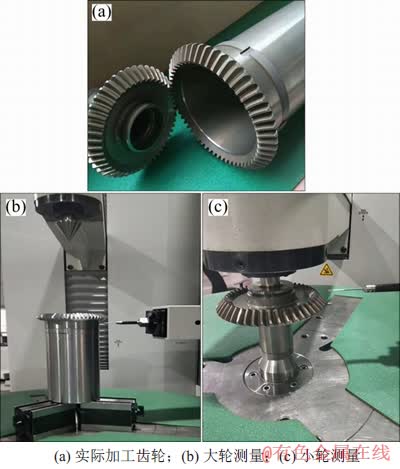
ͼ5��ʵ�ʼӹ����ֵ�CMM����
Fig. 5��CMM measurement of actual machined gears
3.2���������IJ������
�ڳ�������滮�У������ֵ���������Ԥ��1����������AMBMCMDM���ó���������Ը��ݳ�����ɢ����ȷ����������ʾ1�����۲ο�����Ƴ��档����Gleason����һ�����Ԥ�������滮�����汻��ɢ����1�����͵�5��9�����ݿ�(face width, FW)����ȡ9���㣬���ݸ�( tooth height, TH)����ȡ5���㣬�����������۳���IJ����档ͼ6��ʾΪ����������Dz�ó�����
��3��ʾΪ����������������������ij���ģ����ʵ�ʼӹ�����ģ�ͽ��бȽϿ�֪��С��ϳ�ݺ�İ���������ƽ��ֵΪ1.862 ��m����СֵΪ-4.400 ��m��λ��(5, 9)�㼴�������ݶ����ཻ�������ֵΪ5.100 ��m��λ��(5,4)�㼴�����ݸ����м䴦��С����������ƽ��ֵΪ5.236 ��m��������СֵΪ-9.700 ��m��λ��(2,1)�㼴С�����м�λ�ã����ֵΪ13.400 ��m��λ��(5,9)�㼴�����������ݶ����ཻ����
���ֵIJ�����������С����˵�����룬���ְ���������ƽ��ֵΪ2.328 ��m��������СֵΪ-5.200 ��m��λ��(3,2)�㼴����С�����м䴦�����ֵΪ3.200 ��m��λ��(4, 9)�㼴����濿���ݶ����ཻ����������������ƽ��ֵΪ1.477 ��m����СֵΪ-2.600 ��m��λ��(3, 2)�㼴����С�����м䴦�����ֵΪ3.400 ��m��λ��(5,1)�㼴С������ݶ����ཻ����
3.3�������������Ľ������
�ɱ�3��֪�����ڴ��������������ӹ�����ʵ�ʼӹ���������У���ͨ��1��װ��ͬʱϳ�������棬��С������ֱ�װ�в�ʹ�ò�ͬ���ͺ�ϳ���������ܵõ�����Ҳ��������ϴ�����ȣ�С�ֳ����������ƫ���ԭ����Σ�Ӱ����澫�ȵ����س��˰�װ��װ������⣬��Ӧ���ǵ������ռ伸��������ĥ��ȡ�
��ʵ�ʽ�ģ�����з��֣�ʹ��Matlab�����ɢ���������ʱ����ɢ�ij�������̶ܳ�Ҳ��Ӱ����άģ�͵ľ��ȡ�
�����ij���㵼����CATIA�У����ò�ͬ�ķ�ʽ������ά���棬��õ�ʵ��ģ�;���Ҳ�������������磬��9�еij�����������ٹ���ͽ�15�еij�����������ٹ���õ��ij��治һ������CATIA����ʽ�������ģ���У�ѡ���Ž����桱�͡���������桱������ij���Ҳ���в��졣
�ۺϿ�������ӹ��������Լ���������ģ�����и������ĵ�Ӱ�죬�ڳ��淨ʸ����õ��ij���������������Ƚϸߣ�˵����������Ļ��ڲ�������������ͨ�ý�ģ����ԭ����ȷ��
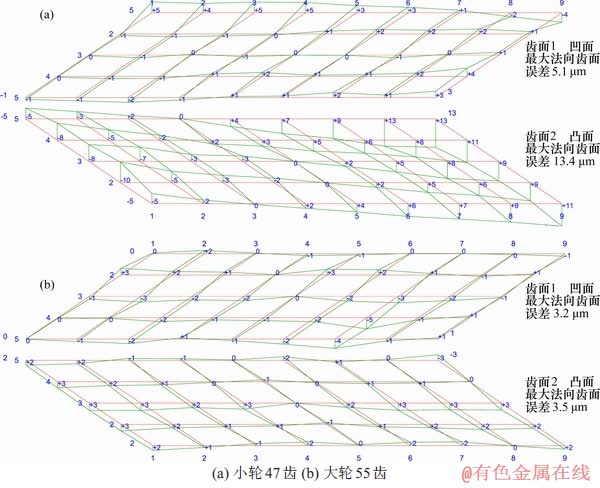
ͼ6������������
Fig. 6��Tooth surface error analysis
��3���������������
Table 3��Tooth surface error measurement results ��m

4 ����
1) ����Newton������������������������Ի��ͳһ�������������ۺϿ��ǻ������οռ�����װ���������Դ��������������˶������Ļ������ֽ�ģ������
2) ��1�����ֲ�������ģ�ͽ��������������ʾ��������ģ����ʵ��ģ�ͷdz��ӽ���Ϊ����������������ṩ�����ļ���֧�ź����ۻ�����
3) ���������˶���ģ����������������˶����������ij��������ģ�͡��û����ӹ����������������еʽ�ӹ���������������ת�����ɣ�ʵ�������мӹ���ʽͳһ�IJ����������������ֽ�ģ��
�ο����ף�
[1] ����, �á��¸�. ����ɭר������ϵͳ(GEMS)�����������ּ�˫����������ֻ������¼�Ԫ[J]. �������켼����װ���г�, 2005(4): 87-93.
FAN Qi, RON D. Gleason expert manufacturing system (GEMS) opens a new era for digitized manufacturing of spiral bevel and hypoid gears[J]. World Manufacturing Engineering & Market, 2005(4): 87-93.
[2] GONZALEZ-PEREZ I, FUENTES A, HAYASAKA K. Analytical determination of basic machine-tool settings for generation of spiral bevel gears from blank data[J]. Journal of Mechanical Design, 2010, 132(10): 91-104.
[3] LITVIN F L, KUAN C, WANG J C, et al. Minimization of deviations of gear real tooth surfaces determined by coordinate measurements[J]. Journal of Mechanical Design, 1993, 115(4): 995-1001.
[4] ARTONI A, GABICCINI M, GUIGGIANI M. Nonlinear identification of machine settings for flank form modifications in hypoid gears[J]. Journal of Mechanical Design, 2008, 130(11): 112602-112609.
[5] FAN Qi. Tooth surface error correction for face-hobbed hypoid gears[C]// Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. San Diego, California, USA: ASME, 2009: 61-69.
[6] FAN Qi. Computerized modeling and simulation of spiral bevel and hypoid gears manufactured by gleason face hobbing process[J]. Journal of Mechanical Design, 2006, 128(6): 1315-1327.
[7] �ƽ�Ԫ, ����ƽ, ��̫ƽ. ����������������ϳ�ݻ����������ֵ��㷨�������[J]. ������ҵ��ѧѧ��, 2011, 37(4): 487-493.
TANG Jinyuan, LIU Yanping, PU Taiping. Simulation for tilt manufacturing of spiral bevel gears based on five-axes CNC machine tool[J]. Journal of Beijing University of Technology, 2011, 37(4): 487-493.
[8] HE Di, DING Han, TANG Jinyuan. A new analytical identification approach to the tooth contact points considering misalignments for spiral bevel or hypoid gears[J]. Mechanism and Machine Theory, 2018, 121: 785-803.
[9] DING Han, TANG Jinyuan, SHAO Wen, et al. Optimal modification of tooth flank form error considering measurement and compensation of cutter geometric errors for spiral bevel and hypoid gears[J]. Mechanism and Machine Theory, 2017, 118: 14-31.
[10] �ƽ�Ԫ, ���Ʒ�, �ܳ�, ��. ��������չ�ɳ���ļ��ν�ģ[J]. ���������, 2009, 26(2): 293-297.
TANG Jinyuan, HUANG Yunfei, ZHOU Chao, et al. Geometry modeling of spiral bevel gears based on generating tooth-surface[J]. Computer Simulation, 2009, 26(2): 293-297.
[11] �ܿ���. ����Ԥ���������Ե��������ֵ����ϳ�����Ƽ�CNC���켼���о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2009: 46-64.
ZHOU Kaihong. Research on meshing characteristic-Based design & CNC technology of point-contact spiral bevel gears tooth surface[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2009: 46-64.
[12] �ܿ�, �ƽ�Ԫ, ���˳, ��. �������ֳ����������ٲ���������[J]. �й���е����, 2010, 21(4): 469-476.
CAO Kang, TANG Jinyuan, LI Guoshun, et al. Least parametrical modification method of spiral bevel gear tooth surface errors[J]. China Mechanical Engineering, 2010, 21(4): 469-476.
[13] LIN C Y, TSAY C B, FONG Z H. Computer-aided manufacturing of spiral bevel and hypoid gears with minimum surface-deviation[J]. Mechanism and Machine Theory, 1998, 33(6): 785-803.
[14] SHIH Y P, FONG Z H, LIN G C Y. Mathematical model for a universal face hobbing hypoid gear generator[J]. Journal of Mechanical Design, 2007, 129(1): 38-47.
[15] FAN Qi, DAFOE R S, SWANGER J W. Higher-order tooth flank form error correction for face-milled spiral bevel and hypoid gears[J]. Journal of Mechanical Design, 2008, 130(7): 1-7.
[16] FONG Z H. Mathematical model of universal hypoid generator with supplemental kinematic flank correction motions[J]. Journal of Mechanical Design, 2000, 122(1): 136-142.
[17] ARTONI A, GABICCINI M, GUIGGIANI M, et al. Multi-objective ease-off optimization of hypoid gears for their efficiency, noise, and durability performances[J]. Journal of Mechanical Design, 2011, 133(12): 1-9.
[18] ZHOU Yuansheng, PENG Shandong, LIU Xinru, et al. A novel method to generate the tooth surface model of face-milled generated spiral bevel gears[J]. The International Journal of Advanced Manufacturing Technology, 2019, 102(5/6/7/8): 1205-1214.
���༭ ��������
�ո����ڣ� 2019 -08 -27; �����ڣ� 2019 -09 -29
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51535012��U1604255) (Projects(51535012, U1604255) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��ƽ�Ԫ����ʿ�����ڣ������Գ��ִ���Ϊ��Ҫ����ĸ��������/����ò��������о���E-mail��jytangcsu@163.com

