DOI: 10.11817/j.issn.1672-7207.2016.02.017 /
考虑制造误差的人字齿行星传动均载特性
任菲,秦大同,吴晓铃
(重庆大学 机械传动国家重点实验室,重庆,400044)
摘要:以人字齿行星齿轮传动系统为研究对象,基于齿轮系统动力学理论和牛顿运动定律,考虑各构件制造偏心误差和齿廓误差、时变啮合刚度、轴承支承刚度以及陀螺效应等因素,运用集中参数法建立考虑人字齿轮实际结构特点的该型传动弯-扭-轴耦合动力学模型;通过计算在不同浮动方式下的系统均载系数,获得太阳轮偏心误差以及齿廓误差与系统均载系数关系曲线,进而分析在不同浮动方式下制造误差对人字齿行星传动均载特性的影响;同时对比分析在有太阳轮浮动和非浮动情况下,太阳轮的径向浮动能力。研究结果表明:制造误差和构件浮动对人字齿行星传动均载性能有显著的影响,构件浮动可以明显地改善系统均载特性,并且系统均载系数随制造误差的增加而增大;与非浮动情况相比,浮动太阳轮时太阳轮中心径向位移量明显较大,提高了太阳轮浮动能力。
关键词:人字齿行星传动;制造误差;动力学模型;浮动;均载
中图分类号:TH132.425 文献标志码:A 文章编号:1672-7207(2016)02-0474-08
Load sharing performances of herringbone planetary gears considering manufacturing errors
REN Fei, QIN Datong, WU Xiaoling
(State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China)
Abstract: Based on the theory of gear system dynamics and Newton's laws of motion, considering the actual structure of herringbone gears, a lateral-torsional-axial coupling dynamic model of a herringbone planetary gear train (HPGT) was set up by the lumped-parameter method. Manufacturing eccentric errors, tooth profile errors, time-varying mesh stiffness, bearing stiffness, gyroscopic effect, and so on were considered in the presented model. By calculating the system load sharing coefficients with different floating forms, the relationship curves between the sun gear eccentric error as well as the tooth profile error and the system load sharing coefficients were obtained and the effects of manufacturing errors on the HPGT load sharing characteristics were analysed with different floating forms; meanwhile, sun gear radial floating capacities between two situations of sun gear float and non-float were compared. The results show that manufacturing error and the float of the component significantly affect the HPGT load sharing characteristics, the float of the component can obviously improve the system load sharing performance, and as manufacturing errors go up, the system load sharing factor increases; compared with non-floating, the sun gear radial displacement is larger, when the sun gear floats, thus improving the sun gear floating capacity.
Key words: herringbone planetary gears; manufacturing errors; dynamic modeling; float; load sharing
行星齿轮传动具有功率密度高、传动比大、承载能力强、功率分流等优点,在风电、汽车、航空、船舶等传动系统中得到广泛使用。行星传动通常由直齿、斜齿或人字齿等齿形所组成。与斜齿轮相比,人字齿轮具有更强承载能力、较小轴向力和更高重合度等优点,因此,人字齿行星传动被广泛应用于航空发动机,内燃机,舰船汽轮机,起重机械,采煤机等重型机械传动系统中。由于不可避免地制造误差,引起行星轮之间载荷分配不均匀,而行星传动中的各个行星轮之间载荷分配均匀性是发挥行星传动优点的保证,它直接影响到齿轮系统运转平稳性、可靠性和使用寿命,因而,研究制造误差对人字齿行星传动系统均载性能的影响就显得非常必要。国内外学者针对直齿或斜齿行星传动的动力学建模及其均载性能开展了大量研究。KAHRAMAN等[1-3]对直齿行星传动开展了动态和静态均载特性的理论研究;SINGH[4-5]也对行星传动系统均载性能进行了动力学理论研究;LIGATA等[6]对斜齿行星传动均载性能开展了试验研究,通过测量齿根位置应变对有限元均载结果进行了验证;朱增宝等[7]建立了封闭差动人字齿轮传动系统动力学模型,并研究了安装误差对封闭差动人字齿轮传动均载影响;方宗德等[8]研究了2K-H型直齿行星传动的动态特性;孙智民等[9]对封闭差动直齿行星传动系统进行了动力学特性研究。然而,对于行星传动均载研究大部分集中于直齿、单斜齿行星传动,而制造误差对人字齿行星传动均载性能影响的研究尚无报道。本文作者考虑人字齿轮实际结构,基于集中参数理论,建立人字齿行星传动通用动力学模型,该模型可用来研究具有不同类型制造误差和任意数目行星轮的人字齿行星传动动态性能。以1个具有3个行星轮的NGW型人字齿行星传动为实例仿真对象,探讨在不同浮动方式下,太阳轮偏心误差以及齿廓误差对人字齿行星传动动态均载特性的影响,同时对比分析在具有太阳轮浮动和没有浮动情况下太阳轮的径向浮动量。
1 人字齿行星传动系统动力学模型
图1所示为人字齿行星齿轮传动系统简图。它由中心构件(太阳轮s、左侧内齿轮r2、右侧内齿轮r1和行星架c), N个行星轮pi(i=1,2,…,N)以及高速输入轴和低速输出轴等构成。输入扭矩Tin经太阳轮s分流到N个行星轮pi(i=1,2,…,N),最后经行星架c输出。太阳轮和各个行星轮采用人字齿轮;考虑到安装条件的限制,内齿轮采用2个旋向不同的斜齿齿圈r1和r2;所有构件均采用滚动轴承支承。
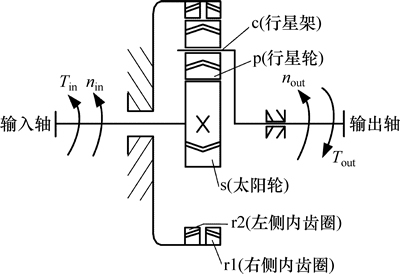
图1 人字齿行星齿轮传动系统简图
Fig. 1 Structure sketch of HPGT
图2所示为考虑人字齿轮两侧的人字齿行星传动系统弯-扭-轴耦合动力学模型。在图2中建立以下几个坐标系:OXYZ为固定坐标系;Oxyz为行星架动坐标系,该坐标系与行星架固连并随行星架等速转动,其原点O位于行星架理论安装中心,x轴通过第1个行星轮的理论中心,x轴正方向逆时针旋转90°即为y轴正方向,z轴通过坐标原点O同时垂直于x轴、y轴;坐标系Oixiyizi (i=1,2,…,N)与行星架固连并随行星架匀速旋转,其坐标原点位于第i个行星轮的理论中心Oi,3个坐标轴与Oxyz的3个坐标轴分别平行。在建模过程中,假定各行星轮沿周向均布且具有相同几何和物理参数,人字齿轮左、右侧除了螺旋角旋向不同之外,在几何上是完全相同的,轮齿和支承被简化为弹簧,行星架和齿轮轮体被视为刚体。
由于与有限元方法相比,集中质量参数法建模过程简单,求解速度快,并且预测系统动态特性的准确度也较高,对计算机硬件要求相对较低,因而依据系统构件的受力状况和支承形式建立合适的集中参数动力学模型是一种准确高效的方法[10]。集中参数动力学模型的处理方法就是将系统中的各运动构件处理为含有质量的质点,并将它们之间的连接处理为弹性连接,选择合适自由度来建立系统的二阶运动微分方程组[10]。这里,采用集中质量参数法[10]建立图2所示的人字齿行星传动系统弯曲-扭转-轴向耦合动力学模型,模型中考虑人字齿轮实际结构,由于制造误差引起的人字齿轮(行星轮、太阳轮)、行星架以及左、右内齿轮的轴向振动,时变啮合刚度,各构件偏心误差以及齿廓误差等影响。
图2中,uj(j=c,s,r1,r2,1,2,…,N)为由于系统振动引起的各元件角位移折算到切向的线位移;xj,yj和zj为由于系统振动而使各元件质心偏离理论位置的线位移; ,
, ,
, ,
, (i=1,2,…,N)分别为第i个行星轮-左侧内齿圈副、第i个行星轮-右侧内齿圈副、左侧第i个行星轮-太阳轮副和右侧第i个行星轮-太阳轮副的静态传递误差;
(i=1,2,…,N)分别为第i个行星轮-左侧内齿圈副、第i个行星轮-右侧内齿圈副、左侧第i个行星轮-太阳轮副和右侧第i个行星轮-太阳轮副的静态传递误差; ,
, ,
, 和
和 分别为第i个行星轮-左侧内齿圈副,第i个行星轮-右侧内齿圈副、左侧第i个行星轮-太阳轮副和右侧第i个行星轮-太阳轮副的时变啮合刚度;
分别为第i个行星轮-左侧内齿圈副,第i个行星轮-右侧内齿圈副、左侧第i个行星轮-太阳轮副和右侧第i个行星轮-太阳轮副的时变啮合刚度; ,
, 和
和 (j=s,c,r1,r2)分别为构件j在x,y和z方向的轴承支撑刚度;
(j=s,c,r1,r2)分别为构件j在x,y和z方向的轴承支撑刚度; ,
, 和
和 分别为行星轮在径向、切向和轴向的轴承支撑刚度。
分别为行星轮在径向、切向和轴向的轴承支撑刚度。
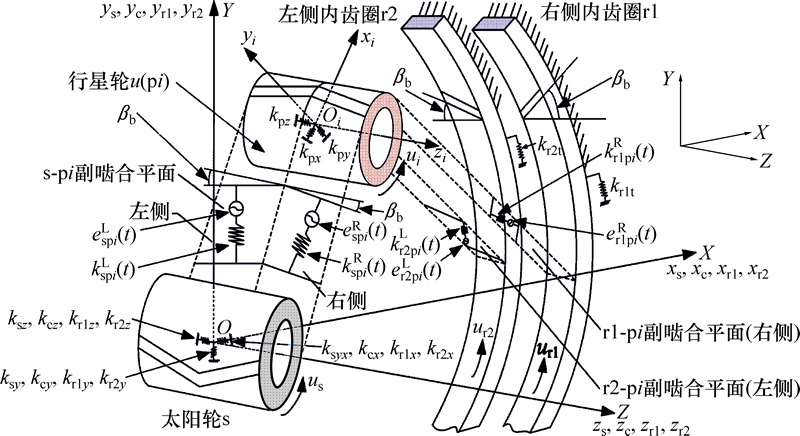
图2 考虑人字齿轮两侧的人字齿行星传动系统弯-扭-轴耦合动力学模型
Fig. 2 Lumped-parameter dynamic model of HPGT considering both sides for each gear
人字齿行星系统中各元件之间的运动和变形协调关系如图3所示。图中,φi为第i个行星轮理论中心与行星架理论中心连线与x轴正方向的夹角, ;
; 和
和 分别为第i个行星轮和左、右内齿圈以及第i个行星轮和太阳轮之间的端面啮合角;
分别为第i个行星轮和左、右内齿圈以及第i个行星轮和太阳轮之间的端面啮合角; 。
。
根据图3可推导出人字齿行星传动各元件之间的弹性变形。
1) 第i个行星轮-左侧内齿圈副在啮合线上的弹性变形。


 (1)
(1)
2) 第i个行星轮-右侧内齿圈副在啮合线上的弹性变形。


 (2)
(2)
3) 左侧第i个行星轮-太阳轮副在啮合线上的弹性变形。


 (3)
(3)
4) 右侧第i个行星轮-太阳轮副在啮合线上的弹性变形。
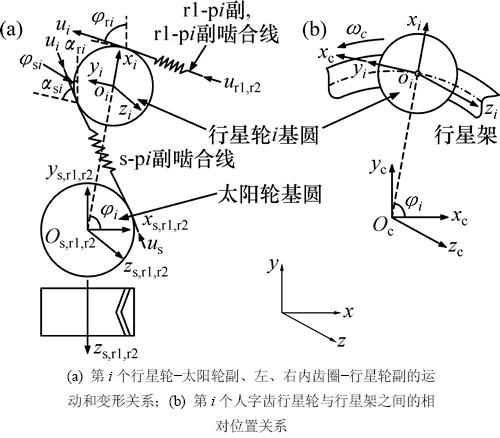
图3 人字齿行星传动各元件运动和变形关系
Fig. 3 Relationship between motion and deformation for HPGT components


 (4)
(4)
5) 行星架与第i个行星轮分别沿行星轮径向、切向的相对变形。
 (5)
(5)
 (6)
(6)
根据牛顿第二定律,建立太阳轮的动力学方程如下式所示。
 (7)
(7)
式中:ms为太阳轮质量;Is为太阳轮转动惯量;rs为太阳轮基圆半径;Ts为作用在太阳轮上的输入转矩;ωc为行星架的输入角速度。
同理,可推导出行星架、行星轮、左侧内齿圈、右侧内齿圈动力学方程。组装各构件的动力学方程得到人字齿行星传动系统(4+N)×4自由度的动力学方程的矩阵形式如下式所示。
 (8)
(8)
式中:q为系统广义坐标列矢量;M为系统广义质量矩阵;G为陀螺矩阵;Km为齿轮啮合刚度矩阵,且
 ;Kb为轴承支承刚度矩阵;
;Kb为轴承支承刚度矩阵; 为向心刚度矩阵;F(t)为系统内激励矢量;T为系统外部扭矩矢量。
为向心刚度矩阵;F(t)为系统内激励矢量;T为系统外部扭矩矢量。
2 系统的内部激励分析
2.1 综合啮合误差激励
本文考虑人字齿行星传动系统中各齿轮(太阳轮、左侧内齿圈、右侧内齿圈、行星轮) 和行星架的制造偏心误差以及齿廓误差。将各构件制造偏心误差与齿廓误差分别等效到内、外齿轮副啮合线上,经叠加得到当量啮合误差如下式所示。
 (9)
(9)
式中:i=1,2,…,N; 和
和 分别为人字齿行星系统左侧第i个内、外啮合副上的当量啮合误差;
分别为人字齿行星系统左侧第i个内、外啮合副上的当量啮合误差;  和
和 分别为人字齿行星系统右侧第i个内、外啮合副上的当量啮合误差;
分别为人字齿行星系统右侧第i个内、外啮合副上的当量啮合误差; ,
, 和
和 分别为第i个行星轮-左侧内齿圈副、第i个行星轮-右侧内齿圈副以及第i个行星轮-太阳轮副的齿廓误差幅值;
分别为第i个行星轮-左侧内齿圈副、第i个行星轮-右侧内齿圈副以及第i个行星轮-太阳轮副的齿廓误差幅值; ,
, ,
, ,
, 和
和 分别代表第i个行星轮、行星架、左侧内齿轮、右侧内齿轮和太阳齿轮的制造偏心误差幅值,其初相位分别为
分别代表第i个行星轮、行星架、左侧内齿轮、右侧内齿轮和太阳齿轮的制造偏心误差幅值,其初相位分别为 ,
, ,
, ,
, 和
和 ;
; ,
, 和
和 [11-12]分别为第i个行星轮-内齿轮副、第i个行星轮-太阳轮副以及内外啮合的相位差;
[11-12]分别为第i个行星轮-内齿轮副、第i个行星轮-太阳轮副以及内外啮合的相位差; 为端面压力角;
为端面压力角; 为行星轮安装位置角,且;
为行星轮安装位置角,且; ,
, 和
和 分别为行星架、太阳轮和行星轮的角速度;Tm为系统的啮合周期。
分别为行星架、太阳轮和行星轮的角速度;Tm为系统的啮合周期。
对于内齿圈固定的人字齿行星传动系统,其啮合圆频率 为
为
 (10)
(10)
式中:为太阳轮的输入转速;Zr和Zs分别为内齿圈和太阳轮的齿数。
2.2 时变啮合刚度激励
人字齿行星传动系统中的左侧第i个内、外啮合副的时变啮合刚度和以及右侧第i个内、外啮合副的时变啮合刚度和均按照MAATAR等[13]推导的斜齿轮时变啮合刚度公式展开成一阶Fouriers级数的形式进行计算。依据文献[11-12],计入行星轮啮合相位关系,包含在Fouriers系数 ,
, ,
, 和
和 中。
中。
 (11)
(11)
其中:i=1,2,…,N; 为平均啮合刚度;,,和均为一阶Fouriers展开项系数;为系统啮合圆频率。
为平均啮合刚度;,,和均为一阶Fouriers展开项系数;为系统啮合圆频率。
3 人字齿行星传动均载特性分析
本文针对图1所示的某人字齿行星齿轮传动系统进行数值仿真分析,其基本参数如下:太阳轮齿数Zs=23,行星轮齿数Zp=17,左、右侧内齿圈齿数Zr2=Zr1=17,法面模数mn=27 mm,行星轮个数N=3,法面压力角αn=20°,螺旋角β=25°,人字齿太阳轮齿宽bs=360 mm,人字齿行星轮齿宽bp=360 mm,左、右侧内齿轮齿宽b r2= b r1=170 mm;太阳轮、行星轮和左、右内齿圈均使用合金结构钢20CrMnMo;太阳轮、行星轮、行星架在x,y和z方向的轴承支撑刚度均为109 N/m,左、右内齿圈在x,y和z方向的轴承支撑刚度均为1010 N/m;左、右内齿圈的切向支承刚度均为1010 N/m;该行星级输入转速ns=100 r/min,输入扭矩T=100 kN・m;各齿轮的制造偏心误差以及齿廓误差分别为20 μm。
对于行星齿轮传动系统,为了实现各行星轮之间载荷分配均匀性,必须使齿轮装置的中心构件在载荷作用下沿径向方向能够自我调整,从而补偿正如文献[14-15]中所述的一些制造误差和弹性变形。因此,太阳轮通常设计成径向浮动的形式。
3.1 太阳轮浮动对浮动量影响分析
为了分析太阳轮浮动对浮动量影响,将太阳轮浮动和非浮动情况下的太阳轮中心径向位移时域响应进行对比分析。定义太阳轮中心的径向位移量rs如下式所示[16]:
 (12)
(12)
式中:xs 和ys分别为太阳轮在x和y方向位移。当太阳轮浮动时,则rs表示太阳轮的径向浮动量[16]。
在数值计算中,使用非常低的太阳轮轴承支撑刚度来模拟太阳轮浮动。图4所示为在太阳轮浮动和非浮动2种情况下的太阳轮径向位移时域响应。为了清晰起见,图4仅显示一部分仿真时间的数据。从图4可以看出:浮动情况下太阳轮浮动位移要比非浮动情况下的大,太阳轮浮动时所产生的较大的浮动量可能是用来平衡载荷以使不同行星轮之间的载荷分配均匀。太阳轮的浮动能力是通过太阳轮柔性支撑产生的,太阳轮浮动时,太阳轮的支撑刚度减小、浮动量会增大,提高了太阳轮的浮动能力,而当非浮动时,太阳轮支撑刚度较大浮动量较小,载荷均衡能力较弱。通过太阳轮的浮动,能够调整各个齿轮副啮合线方向上的位移分配,从而使得各行星轮之间的载荷分配均衡。总之,采用中心构件浮动方式时,中心构件的支撑刚度减小、浮动量增大,提高了中心构件的浮动能力,可以减小行星轮之间的载荷不均现象。
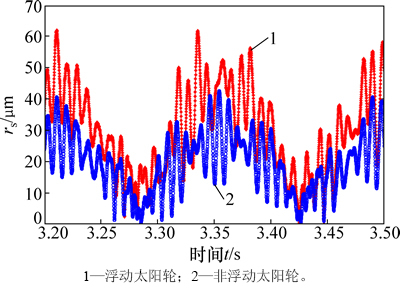
图4 太阳轮浮动和非浮动时太阳轮径向位移时域响应
Fig. 4 Time domain response for radial displacement of sun gear in two cases of floating sun gear and non-floating
3.2 均载系数计算
在人字齿行星传动系统中,由于受各个构件制造误差和弹性变形的影响,各个行星轮承担的载荷并不相等,通常用均载系数来表示传动系统载荷分配均匀性。此外,构件浮动与否也对行星轮之间的载荷分配有影响。均载系数愈大,传动系统载荷分配就愈不均衡。人字齿行星传动系统在每一齿频周期内各齿轮副内、外啮合的均载系数 ,
, ,
, 和
和 分别为
分别为
 (13)
(13)
式中:i=1,2,…,N;j=1,2,…,n1;k=1,2,…,n2;j和k为行星级外啮合和内啮合的齿频周期数;N为行星级个数; 和
和 分别为人字齿行星传动左侧第i个内、外啮合副的动态啮合力;
分别为人字齿行星传动左侧第i个内、外啮合副的动态啮合力; 和
和 分别为人字齿行星传动右侧第i个内、外啮合副的动态啮合力。
分别为人字齿行星传动右侧第i个内、外啮合副的动态啮合力。
令 和
和 分别为系统周期内人字齿行星传动左侧各齿轮副内、外啮合均载系数;令
分别为系统周期内人字齿行星传动左侧各齿轮副内、外啮合均载系数;令 和
和 分别为系统周期内人字齿行星传动右侧各齿轮副内、外啮合均载系数,则
分别为系统周期内人字齿行星传动右侧各齿轮副内、外啮合均载系数,则
 (14)
(14)
式中:i=1,2,…,N;j=1,2,…,n1;k=1,2,…,n2。
令 和
和 分别为系统周期内人字齿行星传动左侧内、外啮合均载系数;令
分别为系统周期内人字齿行星传动左侧内、外啮合均载系数;令 和
和 分别为系统周期内人字齿行星传动右侧内、外啮合均载系数,则
分别为系统周期内人字齿行星传动右侧内、外啮合均载系数,则
 (15)
(15)
因此,系统周期内人字齿行星传动系统均载系数Ω为
 (16)
(16)
3.3 太阳轮制造偏心误差Es对系统均载特性的影响分析
为了研究太阳轮制造偏心误差Es对均载的影响,假定只有太阳轮偏心误差Es是变化的,其他构件的制造偏心误差以及齿廓误差不变且均为20 μm,即
 =20 μm,
=20 μm, =20 μm,i=1,2,…,N。图5所示为太阳轮制造偏心误差示意图。太阳轮制造偏心误差表示太阳轮的实际旋转中心与理论旋转中心之间的偏差。这种缺陷可以通过添加传动误差来引入,而这种传动误差被模拟为太阳轮-行星轮副啮合线上的位移如式(9)中后2式所示。
=20 μm,i=1,2,…,N。图5所示为太阳轮制造偏心误差示意图。太阳轮制造偏心误差表示太阳轮的实际旋转中心与理论旋转中心之间的偏差。这种缺陷可以通过添加传动误差来引入,而这种传动误差被模拟为太阳轮-行星轮副啮合线上的位移如式(9)中后2式所示。
为了简洁和方便以下分析系统周期内人字齿行星传动系统均载系数Ω通常被使用来表示载荷分配情况,如式(16)所示。
图6所示为当其他构件的制造误差都是不变的,假设均为20 μm,即 =20 μm,=20 μm时,在4种不同浮动方式下系统均载系数Ω随太阳轮制造偏心误差Es变化关系。
=20 μm,=20 μm时,在4种不同浮动方式下系统均载系数Ω随太阳轮制造偏心误差Es变化关系。
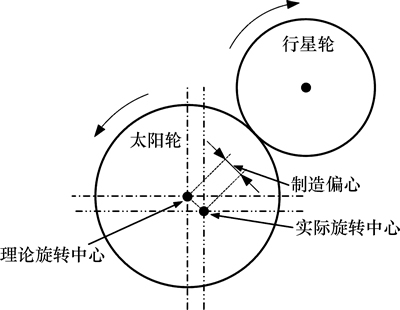
图5 太阳轮制造偏心误差示意图
Fig. 5 Schematic diagram of manufacturing eccentric error for sun gear
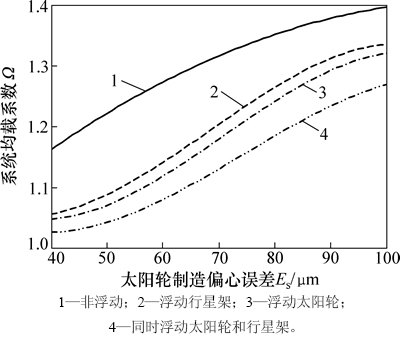
图6 在不同浮动方式下系统均载系数Ω与太阳轮偏心制造误差Es之间的关系
Fig. 6 Relationships between system load sharing coefficient Ω and sun gear manufacturing eccentric error Es under different floating forms
由图6可知:太阳轮制造偏心误差Es对均载影响明显,并且系统均载系数Ω随着太阳轮制造偏心误差Es增大而增大。换言之,随着误差Es增加,在不同行星轮之间的载荷分配情况将会变得更差。从图6可以看到:系统的浮动方式也对系统均载性能影响显著。当太阳轮和行星架都不浮动时,系统的均载系数Ω更大,也就是说,此时,人字齿行星传动系统出现了更加严重的偏载。在单浮动情况下,太阳轮浮动效果比行星架浮动效果稍好,这可能是与行星架相比,太阳轮更好的支撑柔性引起的。因而,浮动太阳轮更加方便而得到了广泛应用。与单浮动方式相比,太阳轮和行星架组合浮动的效果更好,也就是说,在不同行星轮之间的载荷分配更加均匀。总之,太阳轮制造偏心误差Es和浮动方式都对系统均载性能影响显著,且随着Es增加,系统均载系数Ω增大。浮动能使系统均载系数减小,即当采用浮动方式时,在不同行星轮之间的载荷分配将会变得更加均匀。而且采用组合浮动时的浮动效果比采用单浮动时的效果要好。
3.4 齿廓误差Esp1对系统均载特性的影响分析
通常,齿廓误差是在制造过程中产生的,它导致轮齿几何形状不完美并且偏离理论的渐开线[17]。同时,认为这种缺陷的频率就等于齿轮啮合频率。图7所示为齿廓误差示意图。此处,只有式(9)中所示的太阳轮和行星轮1啮合的齿廓误差Esp1被考虑。齿廓误差Esp1被模拟为太阳轮-行星轮1啮合线上的位移。
图8所示为当其他齿轮的齿廓误差和所有构件的偏心误差均为常数,假设都是20 μm,即=20 μm,=20 μm时,在不同浮动方式下系统均载系数Ω随齿廓误差Esp1变化关系。
由图8可知:齿廓误差Esp1显著影响系统均载系数Ω。并且可以观察到随着齿廓误差Esp1增大,系统的均载系数Ω明显增加。此外,浮动对系统的载荷分配影响明显。在非浮动的情况下,系统均载系数Ω较大,也就是说,当非浮动时各个行星轮之间的载荷分配出现比较严重的不均衡。与非浮动情况相比,浮动时系统的均载系数明显较小。与太阳轮单浮动相比,太阳轮和行星架组合浮动的效果更好。因此,可知齿廓误差Esp1和浮动均对系统均载影响明显,并且系统均载系数Ω会随着齿廓误差Esp1增加而增大。同时,浮动也能使系统均载系数降低,并且组合浮动的浮动效果更好。
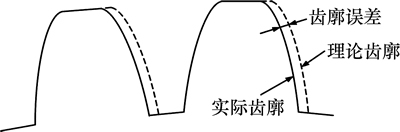
图7 齿廓误差示意图
Fig. 7 Schematic diagram of tooth profile error
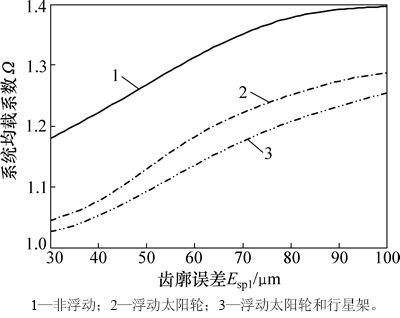
图8 在不同浮动方式下系统均载系数Ω与齿廓误差Esp1之间的关系
Fig. 8 Relationships between system load sharing coefficient Ω and tooth profile error Esp1 under different floating forms
4 结论
1) 基于人字齿轮的实际结构特点,考虑各齿轮齿廓误差和各构件偏心制造误差等,基于集中参数理论,建立了人字齿行星传动系统弯-扭-轴耦合动力学模型并推导了人字齿行星传动均载系数计算公式来研究系统的均载特性。
2) 与非浮动情况相比,当中心构件(如太阳轮) 浮动时中心构件的支撑刚度减小、浮动位移量会明显增大,提高了中心构件的浮动能力,从而可以减小各行星轮之间的载荷不均现象。
3) 制造误差和构件浮动均对人字齿行星传动系统均载性能有明显影响。系统均载系数随着制造误差的增加而显著增大,并且当采用浮动方式时均载系数明显减小而且组合浮动效果更好。因此,减小误差和采用浮动方式在人字齿行星传动系统载荷分配中起着重要作用。
参考文献:
[1] KAHRAMAN A. Load sharing characteristics of planetary transmissions[J]. Mechanisms and Machine Theory, 1994, 29(8): 1151-1165.
[2] KAHRAMAN A. Static load sharing characteristics of transmission planetary gear sets: model and experiment[R]. Detroit: Society of Automotive Engineers, 1999: 1050-1060.
[3] BODAS A, KAHRAMAN A. Influence of carrier and gear manufacturing errors on static load sharing behavior of planetary gear sets[J]. JSME International Journal, 2004, 47(3): 908-915.
[4] SINGH A. Load sharing behavior in epicyclic gears: physical explanation and generalized formulation[J]. Mechanism and Machine Theory, 2010, 45(3): 511-530.
[5] SINGH A. Application of a system level model to study the planetary load sharing behavior[J]. Journal of Mechanical Design, 2005, 127(3): 469-476.
[6] LIGATA H, KAHRAMAN A, SINGH A. An experimental study of the influence of manufacturing errors on the planetary gear stresses and planet load sharing[J]. Journal of Mechanical Design, 2008, 130(4): 137-139.
[7] 朱增宝, 朱如鹏, 李应生, 等. 安装误差对封闭差动人字齿轮传动系统动态均载特性的影响[J]. 机械工程学报, 2012, 48(3): 16-24.
ZHU Zengbao, ZHU Rupeng, LI Yingsheng, et al. Impact of installation error on dynamics load sharing characteristics for encased differential herringbone train[J]. Journal of Mechanical Engineering, 2012, 48(3): 16-24.
[8] 方宗德, 沈允文, 黄镇东. 2K-H行星减速器的动态特性[J]. 西北工业大学学报, 1990, 10(4): 361-371.
FANG Zongde, SHEN Yunwen, HUANG Zhengdong. Dynamic characteristics of 2K-H planetary gearing[J]. Journal of Northwestern Polytechnical University, 1990, 10(4): 361-371.
[9] 孙智民, 沈允文, 李素有. 封闭行星齿轮传动系统的动态特性研究[J]. 机械工程学报,2002, 38(2): 44-48.
SUN Zhimin, SHEN Yunwen, LI Suyou. Study on dynamic behavior of encased differential gear train[J]. Journal of Mechanical Engineering, 2002, 38(2): 44-48.
[10] 卜忠红, 刘更, 吴立言. 行星齿轮传动动力学研究进展[J]. 振动与冲击, 2010, 29(9): 161-166.
BU Zhonghong, LIU Geng, WU Liyan. Research advances in planetary gear trains dynamics[J]. Journal of Vibration and Shock, 2010, 29(9): 161-166.
[11] KAHRAMAN A, BLANKENSHIP G W. Planet mesh phasing in epicyclic gear sets[C]//International Gearing Conference. Newcastle, 1994: 99-104.
[12] PARKER R G, LIN J. Mesh phasing relationships in planetary and epicyclic gears[J]. Journal of Mechanical Design, 2004, 126(2): 365-370.
[13] MAATAR M, VELEX P. An analytical expression for the time-varying contact length in perfect cylindrical gears: Some possible applications in gear dynamics[J]. Journal of Mechanical Design, 1996, 118(4): 586-589.
[14] LIGATA H, KAHRAMAN A, SINGH A. A closed-form planet load sharing formulation for planetary gear sets using a translational analogy[J]. Journal of Mechanical Design, 2009, 131(2): 1-7.
[15] BODAS A, KAHRAMAN A. Influence of carrier and gear manufacturing errors on the static load sharing behavior of planetary gear sets[J]. JSME International Journal, Series C: Mechanical Systems, Machine Elements and Manufacturing, 2004, 47(3): 908-915.
[16] KIM W, LEE J Y, CHUNG J T. Dynamic analysis for a planetary gear with time-varying pressure angles and contact ratios[J]. Journal of Sound and Vibration, 2012, 331(4): 883-901.
[17] WAGAJ P, KAHRAMAN A. Influence of tooth profile modification on helical gear durability[J]. Journal of Mechanical Design, 2002, 124(3): 501-510.
(编辑 杨幼平)
收稿日期:2015-03-09;修回日期:2015-06-25
基金项目(Foundation item):国家重点基础研究发展规划(973计划)项目(2014CB046304);“十二五”国家科技支撑计划项目(2011BAF09B07)(Project (2014CB046304) supported by the National Major Basic Research and Development Program (973 Program) of China; Project (2011BAF09B07) supported by the National Science and Technology Pillar Program during the 12th Five-Year Plan Period)
通信作者:任菲,博士,从事机械传动、齿轮系统动力学与控制等研究;E-mail:renfei2010phd@163.com

