采矿船运动模拟器的研制
郑皓1, 2,刘少军1, 2,胡琼1, 2
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 长沙矿冶研究院 深海矿产资源开发利用技术国家重点实验室,湖南 长沙,410012)
摘要:为建立深海采矿扬矿管道模拟试验系统,研制了1台采矿船运动模拟器。选择Stewart六自由度平台来模拟采矿船的运动,可实现纵摇、横摇、艏摇、纵荡、横荡、升沉6个自由度的运动。根据采矿船运动响应的分析计算,依据相似原理,确定采矿船运动模拟器的运动范围为:绕X,Y和Z轴最大角度为20°;X,Y和Z轴向最大平移量为200 mm。采用6个油缸连接上下平台,通过驱动6个液压缸协调伸缩,使平台按照给定的轨迹模拟采矿船的运动。选择Opto 22公司的SNAP PAC系统完成模拟器的测控功能,选择PID控制实现模拟器的运动控制。试验结果表明:该采矿船运动模拟器可以按照预定的运动轨迹运动,可以实现采矿船运动的模拟。
关键词:采矿船运动模拟器;六自由度平台;姿态正反解;PID控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S2-0257-09
Design and implementation of mining ship motion simulator
ZHENG Hao1, 2, LIU Shao-jun1, 2, HU Qiong1, 2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. The State Key Laboratory of Deep Sea Mineral Resources Development and Utilization Technology,
Changsha Research Institute of Mining and Metallurgy, Changsha 410012, China)
Abstract: In order to set up model test installation of lifting pipe system of deep ocean mining, a mining ship motion simulator was designed and built. Stewart platform was selected to simulate mining ship motion which is six DOFs, i.e.: pitch, roll, yaw, surge, sway and heave. According to mining ship response and similarity principles, the pitch, roll, yaw angles were less than 20° and surge, sway, heave amplitudes were less than 200 mm. The upper and bottom platform were connected by six hydraulic cylinders which were driven by six electro-hydraulic proportional valves independently. SNAP PAC from Opto 22 was selected as the control system and PID control was chosen as the control strategy. The test results show that the mining ship motion simulator can move under the predetermined attitude and can be used as a mining ship simulator.
Key words: mining ship motion simulator; 6-DOF platform; direct and reverse solve; PID control
由于扬矿管道长达几千米,在采矿作业过程中,扬矿系统将受到水面船运动、集矿车运动及海洋环境载荷的作用,管内矿浆的不正常运动亦对管道有影响。扬矿管道的力学行为对采矿系统的整体联动性能影响巨大,不仅影响系统的工作效率,而且影响系统的生存能力。因此,对扬矿管道系统的力学行为分析从深海开采技术一开始就很受重视[1-2]。为建立扬矿管道系统力学行为模拟试验系统,需要研制1台采矿船运动模拟器。目前,国外已有许多公司或者研究机构设 计了多种结构的船舶运动模拟器。美国National Biodynamics Laboratory研制出三自由度SMS(Ship motion simulator),可进行各种海况下人员的工作能力等研究。该SMS可做3个方向的运动:垂荡、横摇和纵摇。垂荡运动由电液伺服驱动平台沿一个塔式机构做上下运动形成,纵摇和横摇则由平台下面的2个转动轴形成。该模拟平台载质量为1 800 kg(包括实验仓与3人质量),可模拟5级海况。美国August设计公司研制出六自由度SMS,主要用于人员的训练和仪器的测试。美国SPAWAR系统中心研制的三自由度SMS,主要用于仪器性能的测试。美国海军水面作战中心Carderock分部研制了一种电液驱动的两自由度(横摇和纵摇)的SMS,可模拟7级海况。荷兰的TNO人员因素研究院也设计了一种SMS,其船舱容积为4.0 m×2.4 m×2.3 m,液压驱动,垂荡幅值为l m,纵摇范围为40°,横摇范围为30°,该系统也用来对运动病等进行研究。国内有一些单位已开展了有关海况和海浪模拟平台方面的研究,并研制出一些平台,例如:海军工程大学研制潜艇减摇模拟平台、船舶工业总公司719研究所研制船舶海浪模拟平台,哈尔滨工程大学研制的船舶运动模拟台[3],华中科技大学研制用于潜艇操纵模拟训练的六自由度模拟器。此外,北京亿美博科技有限公司开发的六自由度运动平台已装备某警备区,并研制成功核潜艇六自由度运动模拟平台。这些平台都是采用Stewart并联结构形式,实现六自由度的运动。由于Stewart 六自由度平台结构简单、高刚度、高精度和高重载能力等优点,正逐步得到广泛应用,如飞行模拟器、车辆驾驶模拟器、海浪模拟台、多自由度振动摇摆台、动感电影摇摆台等[4-5]。为了进行深海采矿扬矿管道系统力学行为模拟试验研究,本文作者研制了用于模拟采矿船在海浪作用下的运动的六自由度平台,为深海采矿系统模拟试验研究提供了一个有效的平台。
1 采矿船运动模拟器的设计
1.1 基本结构与参数设计
在海上航行的船舶,像任何刚体一样,可以产生6个自由度的运动:纵摇、横摇、艏摇、纵荡、横荡、垂荡(升沉)。Stewart六自由度平台可以实现刚体在空间的6个自由度的运动,即沿X,Y和Z轴的移动和绕X,Y和Z轴的转动。本文采用Stewart平台结构,6个油缸连接上下平台,通过驱动六个液压缸协调伸缩,使平台按照给定的轨迹模拟采矿船的运动[6-7]。采矿船运动模拟器基本结构图如图1所示。
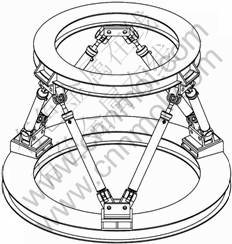
图1 采矿船运动模拟器结构图
Fig.1 Schematic diagram of mining ship motion simulator
根据采矿船运动响应的分析计算,在我国矿区的海况下作业时,采矿船的纵横摇角度均不超过10°,升沉幅值不超过2 m,根据相似原理,选择几何相似比为1:10,由此确定采矿船运动模拟器的运动范围为:绕X,Y和Z轴最大角度为20°;X,Y和Z轴向最大平移量为200 mm。模拟平台参数如表1所示。
表1 采矿船运动模拟器设计参数表
Table 1 Parameter of mining ship motion simulator

1.2 液压驱动系统设计
液压系统包括液压站、油缸、电液比例方向阀、减压阀、溢流阀、电磁方向阀、蓄能器等[8-10]。由于采矿船运动模拟器运动过程中流量变化较大,为保持运动过程流量的稳定性,在比例阀前安装蓄能器保持流量稳定。该液压系统由1个供油泵同时对模拟器6个比例阀控缸系统(3组)供油,安装蓄能器保证系统3个并联油路的流量稳定。通过电液比例方向阀来控制液压缸的伸缩运动,从而达到对6个阀控液压缸的独立控制,以实现纵摇、横摇、升沉的单自由度运动以及其复合运动。油缸上装有位移传感器,利用位移传感器的位移信号构成闭环控制系统。液压站选择变量泵以保证油压的稳定,电机功率为37 kW。油缸采用重庆维庆公司制造的行程为500 mm、内径63 mm的工程缸,油缸上装有美国BEI DUNCAN公司KTF系列位移传感器(俗称电子尺、电阻尺)。位移传感器由超精密度导电塑料基片以及铂金电刷组装而成,量程为525 mm,线形度达到0.05%,重复精度为13 μm,寿命为1亿次,配有 R420变送器,输出信号电流为4~20 mA。电液比例方向阀选用Atos公司的DLHZO-TE-040-L71(自带比例换向阀),DLHZO型阀为高性能的比例阀,直动式,滑套结构,带LVDT位置传感器,根据输入电压信号提供方向控制及无压力补偿的流量控制。比例阀电子放大器型号为DLHZO- TE-040-L71-SP-ZH-7P,采用±10 V控制电压。
1.3 测控系统设计
采矿船运动模拟器以6个阀控非对称缸为控制对象,通过控制比例阀输入电压信号来控制各个液压缸的伸出位移,进而使平台按照给定的性能指标实现采矿船的运动模拟。为了能够实现对阀控非对称缸的自动闭环控制,需要安装位移传感器检测活塞杆的实际位置,然后与理论需要的活塞杆位置进行比较,以它们的差值作为比例阀的控制信号,实现液压缸位置跟踪控制的目标。
本文选择Opto 22公司的SNAP PAC系统完成模拟器的测控功能,测控系统的原理图如图2所示。具体工作原理如下:位移传感器采集到的液压缸位移信号经过A/D转换模块输入到控制器,控制器内经过处理,在一定的控制策略下得出液压缸的控制电压信号,控制电压经过D/A模块转换,并输出到电子放大器,再输出给电液比例方向阀,来控制液压缸的伸缩运动。6个液压缸的硬件组成完全一样,控制策略负责协调6个液压缸的伸缩运动来实现上平台的运动。该测控系统由本地主站和上位机构成,可实现远程控制和局域网内数据共享。
测控系统的核心是Opto22 SNAP系统控制主站,输入输出模块均采用Opto公司的模块,图3所示为测控系统电原理图,主要包括:

图2 控制系统原理框图
Fig.2 Schematic diagram of control system

图3 测控系统控制站电原理图
Fig.3 Schematic diagram of control center
(1) 以太网I/O智能处理器SNAP-PAC-EB1;
(2) 2个四通道直流输入模块IDC5D(2.5~28 V),用于液压站电机、比例阀电源、液压站加载启动和停止按钮以及液压站滤油器1和滤油器2堵塞报警;
(3) 1个四通道交流220 V开关量输出模块OAC5,用于液压站电机接通指示灯、比例阀电源接通指示灯、液压站加载指示灯和滤油器堵塞声光报警器;
(4) 3个两通道模拟量电压输出模块AOV-27,用于输出6个比例阀的控制电压至比例阀电子放大器;
(5) 2个四通道模拟量电流输入模块AIMA-4,用于输入6个液压缸的位移信号;
(6) 2个八通道模拟量电流输入模块AIMA-8,用于输入油压信号,包括:1和2号缸的进油压和回油压,3和4号缸的进油压和回油压,5和6号缸的进油压和回油压,液压站的进油压和回油压(6个油缸被分为3组,每组公用一路进油管和回油管);
(7) 1个两通道PT100温度输入模块AIRTD,用于输入液压站油温和实验室室温;
(8) 1个两通道串行通信模块SCM-485,用于输入多功能电表的电参数。
控制柜内主要部件有opto22 SNAP系统控制主站、网络交换器、多功能电表、交流面板表、电流互感器、空气断路器、交流接触器、热继电器、交流参数稳压器、UPS电源、滞留稳压电源、开关电源、多功能表等。
采矿船运动模拟器程序包括主程序、电参数读写程序、数据存储程序、6个油缸的速度PID控制程序,采用PAC Control Professional进行软件的编写。
为了可以在实验中随时调整模拟器运动参数,必须具有良好的人机界面,便于准确、全面、生动地在屏幕上直观操作、控制和了解采矿船运动模拟器的运行状态和工作参数。监控画面的设计、布局、组织要合理,人机界面友好,操作简单,监控画面的切换要方便快捷,数据记录完整、清楚,打印数据报表、趋势图要规范。
运行过程中的所有信息、数据要求能够自动保存下来,供试验后分析。
设计监控画面包括:控制操作主画面、参数报表画面、实时及历史趋势图画面、工作报警画面、帮助画面等。并用相应开发软件,实现对采矿船运动模拟器系统操作、控制、监视和数据采集。控制操作主画面如图4所示。
2 采矿船运动模拟的实现
2.1 采矿船运动模拟器的控制方法
并联机器人的控制策略可以分为铰点空间控制和任务空间控制2种。最常用的是基于铰点空间的PID控制策略,该控制策略利用铰点空间中每个执行器的位置和速度误差来构造PID控制器,由于实现较为方便,在工程领域有着广泛的应用。任务空间控制策略是一种基于动力学模型的控制方法,它通过计算力矩的方式控制非线性系统沿着期望轨迹运动,也就是使系统的广义坐标跟踪某一指定的时间函数,理论上控制性能较好。这种控制策略在反馈回路中利用机器人动力学实现线性化和解耦,缺点是控制器鲁棒性较差,对机械参数的不确定性比较敏感。

图4 监控画面
Fig.4 Monitoring screen
本文选择基于铰点空间的PID控制[11],对六自由度平台的6个支腿分别设计PID控制器,即分别控制六各油缸完成既定的动作,驱动平台运动实现各种位姿。这种控制策略虽然不能反映时变和耦合的负载特性,但是,相对于液压系统的驱动能力来说负载特性变化不大,铰点空间的PID控制能充分发挥其实现简单、调试方便的优势,使六自由度平台迅速运行起来。
该采矿船运动模拟器的控制通过控制6个液压缸的长度来实现,有如图所示的单闭环PID和双闭环PID2种PID控制方法,原理图如图5所示。
(1) 确定好步长后,单闭环PID首先由姿态反解根据上平台的姿态计算出6个液压缸的长度,再根据上一姿态计算出的液压缸的长度,确定液压缸需要运动的长度和方向,然后根据步长计算出6个液压缸的运动速度和方向,最后由控制器根据液压缸的速度发出电压信号,控制液压缸的运动,液压缸速度用单闭环PID控制,上平台从一个姿态运动到另一个姿态的过程中,规定6个缸根据各自需要运动的长度和方向在一个步长时间内匀速运动到指定位置。每个步长时间内都可看作一次给定速度的PID控制,在整个过程中PID的给定速度值是根据姿态反解结果动态变化的。
(2) 采用双闭环PID控制时,液压缸的速度不是姿态反解的结果,而是由6个液压缸的实时长度经过姿态正解后得出的实时姿态与给定姿态的误差经过PID控制器后的结果,比例阀控制电压与单闭环PID相同,仍由液压缸速度单闭环PID控制得出。
双闭环PID控制引入了姿态的闭环控制,其控制精度明显高于单闭环PID控制精度,但是,双闭环控制时,2个环的PID参数整定十分困难,如果PID参数选择不恰当,控制精度就不能保证,而且双闭环控制需要用到姿态正解,实际上姿态正解需要用到迭代的方法,其计算速度很难满足实时性要求。因此,本文选择较为简单、容易实现、调试方便且控制精度可以满足要求的单闭环PID控制来进行运动模拟器的姿态控制。
2.2 六自由度平台运动的正反解
根据上述采矿船运动模拟器的控制原理,该运动模拟器通过控制6个油缸的长度来实现任意给定运动姿态下采矿船运动的模拟。油缸长度由运动姿态计算得出,这是六自由度平台运动的反解;根据平台运动过程中6个油缸的长度计算出平台的姿态,从而确定平台运动的误差,这是六自由度平台运动的正解。因此,为了实现采矿船运动的模拟,必须首先得到六自由度平台运动的正反解。
为了描述平台的运动,建立2个坐标系,即动坐标系OXYZ和静坐标系O′X′Y′Z′。运动平台的6个上铰点位于半径为ra的圆周上,Ai(i=1,2,…,6)在圆周上均匀分布;运动平台的6个下铰点位于半径为rb的圆周上,Bi(i=1,2,…,6)在圆周上均匀分布。选取动坐标系OXYZ坐标原点为上铰外接圆圆心,并固定在上平台上,将静坐标系O′X′Y′Z′固定在下平台上,并使初始位置时的动坐标系和静坐标系完全重合。运动平台的初始高度(上铰点与下铰点间的垂直距离)为h。坐标轴的方向如图6所示[12-13]。

图5 PID控制原理图
Fig.5 Schematic diagram of PID control

图6 平台坐标示意图
Fig.6 Schematic diagram of coordinate
上铰点在动坐标系中的坐标为:
 (1)
(1)
下铰点在静坐标系中的坐标为:
 (2)
(2)
当运动平台具有姿态Q=(α, β, γ, xp, yp, zp)(其中:α横摇角,β纵摇角,γ偏航角,xp沿O′X′平移,yp沿O′Y′平移,zp沿O′Z′平移)时,则由静坐标系到动坐标系得变换矩阵为:
 (3)
(3)
其中:c表示cos,s表示sin
上铰点在静坐标系中的坐标可用矩阵P表示为:
 (4)
(4)
至此,六自由度平台的反解救很容易得到,上下铰点间的距离即油缸的长度为:
 ;i=1, 2, …, 6 (5)
;i=1, 2, …, 6 (5)
为实现正解,首先建立非线性方程组,
 ;i=1, 2, …, 6 (6)
;i=1, 2, …, 6 (6)
3 采矿船运动模拟器的性能测试
采矿船运动模拟器的试验包括模拟采矿船在简谐波中的响应试验和采矿船在随机波中的响应试验,这2种试验又包括单自由度运动试验和多自由度复合运动试验。
试验前,先确定各简谐运动的运动参数,如运动的周期、幅值,或者确定随机运动波形,并将波形转换成表格数据,然后按照给定的运动轨迹,在Matlab中用姿态反解程序计算出6个油缸每个步长的长度,最后将平台姿态反解结果上传到opto22控制器的内存中,作为每步油缸长度的给定值,用PID控制实现采矿船运动模拟器的运动轨迹控制。
3.1 采矿船在简谐波中的响应试验
采矿船在简谐波中的响应试验包括升沉运动、纵摇运动、横摇运动以及这3种简谐运动的复合运动试验。首先是单自由度运动的试验,以四级海况为例,图7所示为单自由度升沉运动试验结果,预定的升沉运动轨迹是周期为4.8 s、幅值为75 mm的简谐运动;图8所示为单自由度纵摇运动试验结果,预定的纵摇运动轨迹是周期为4.8 s、幅值为15°的简谐运动;图9所示为单自由度横摇运动试验结果,预定的横摇运动轨迹是周期为4.8 s、幅值为15°的简谐运动。需要说明的是:(1) 实际上采矿船在四级海况下的横摇幅值低于2°,纵摇幅值只有6°,这里的运动响应试验中纵横摇的角度幅值均选取15°;(2) 试验中测量的是6个油缸的实时长度,测量数据在试验结束后经过姿态正解,计算出平台的姿态,图7中实测升沉位移、图8中实测纵摇角度、图9中实测横摇角度均为姿态正解计算出的结果。
其次是多自由度复合运动的试验,纵横摇和升沉运动同时存在,升沉运动轨迹是周期为4.8 s、幅值为75 mm的简谐运动,纵摇和横摇运动轨迹是周期为 4.8 s、幅值为15°的简谐运动,试验结果如图10~12所示。
3.2 采矿船在随机波中的响应试验
采矿船在随机波中的响应试验包括升沉运动、纵摇运动、横摇运动以及这3种随机运动的复合运动试验。试验中的运动轨迹参数根据采矿船的运动响应给出。图13所示为四级海况下单自由度随机升沉运动的试验结果,幅值116 mm,图14所示为六级海况下单自由度随机升沉运动的试验结果,幅值为155 mm。
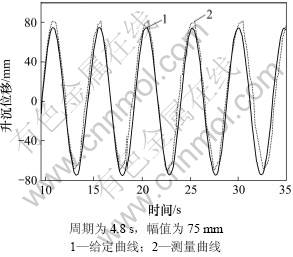
图7 单自由度升沉运动试验结果
Fig.7 Results of DOF of heave motion

图8 单自由度纵摇运动试验结果
Fig.8 Results of DOF of pitch motion

图9 单自由度横摇运动试验结果
Fig.9 Results of DOF of roll motion

图10 三自由度复合运动升沉位移曲线
Fig.10 Displacement curve of three DOF motion

图11 三自由度复合运动纵摇角度变化曲线
Fig.11 Angle curve of three DOF motion

图12 三自由度复合运动横摇角度变化曲线
Fig.12 Angle curve of three DOF motion
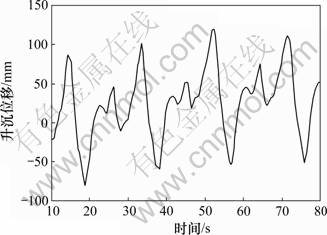
图13 四级海况下单自由度随机升沉运动位移变化曲线
Fig.13 Displacement curve of random heave motion under level 4 sea condition

图14 六级海况下单自由度随机升沉运动位移变化曲线
Fig.14 Displacement curve of random heave motion under level 6 sea condition
上述试验结果表明:该采矿船运动模拟器可以按照预定的运动轨迹运动,可以实现采矿船运动的模拟。试验结果同时表明:六自由度平台的运动是存在误差的,该误差来源于2个方面,一是机械误差,包括各零部件的加工和安装误差,往往增加了成本也达不到理想的效果;二是控制误差。由于本文选用铰点空间的PID控制策略,忽略了各驱动机构之间的耦合特性,影响了各驱动机构的动态特性;同时,虽然液压缸的控制采用了PID闭环控制,但是,位姿输入到位姿输出实际上是开环的,意味着无法将实际的位姿误差引入控制系统进行修正。因此,要想进一步提高平台的性能,必须在PID控制器的基础上改善液压控制系统的响应特性,还需要对运动平台进行位姿标定和误差 补偿。
4 结论
采矿船运动模拟器可以按照预定的运动轨迹运动,虽然采矿船运动模拟器的运动存在误差,但是,由于实际的海浪是随机的,采矿船在这种海浪下的运动响应也是随机的,对采矿船运动的模拟只要求能产生一定幅度和一定周期下各自由度运动(升沉,纵摇,横摇)及其复合运动,所以,本文提出的用六自由度平台方案可以满足采矿船运动模拟的要求。
参考文献:
[1] XU Yan, FENG Ya-li, ZHANG Wen-ming. Articulated lifting system modeling based on dynamics of flexible multi-body systems[J]. China Ocean Engineering, 2007, 21(4): 715-722.
[2] FENG Ya-li, ZHANG Wen-ming, FENG Fu-zhang, et al. Experiment and simulation for articulated lifting subsystem of 1 000 m deep sea mining system[J]. China Ocean Engineering, 2007, 21(3): 525-532.
[3] 杨鹏, 梁利华, 宋吉广. 基于PMAC的六自由度船舶运动模拟台控制系统设计[J]. 制造业自动化, 2006, 28(11): 51-54.
YANG Peng, LIANG Li-hua, SONG Ji-guang. Design of the PMAC-based control system for the six degrees of freedom ship motion simulation platform[J]. Manufacturing Automation, 2006, 28(11): 51-54.
[4] 杨灏泉. 飞行模拟器六自由度运动系统及其液压伺服系统的研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院, 2002: 10-12.
YANG Hao-quan. Research on 6-DOF motion system of flight simulator and its hydraulic servo system[D]. Harbin: Harbin Institute of Technology. School of Mechanic and Electrical Engineering, 2002: 10-12.
[5] 杨世祥, 杨涛, 徐悦桐. 大型数字式六自由度运动平台的开发[J]. 液压与气动, 2003(8): 46-47.
YANG Shi-xiang, YANG Tao, XU Yue-tong. The development of the digital six-DOF Stewart platform[J]. Chinese Hydraulics & Pneumatics, 2003(8): 46-47.
[6] 黄真, 孔令富, 方跃法. 并联机器人机构学理论及控制[M]. 北京: 机械工业出版社, 1997: 33-43.
HUANG Zhen, KONG Ling-fu, FANG Yue-fa. Parallel robot mechanism theory and control[M]. Beijing: China Machine Press, 1997: 33-43.
[7] 肖英奎, 赵丁选, 石祥种. 六自由度电液伺服式并联机构的设计[J]. 液压与气动, 2004(8): 36-38.
XIAO Ying-kui, ZHAO Ding-xuan, SHI Xiang-zhong. Development of 6-DOF motion simulator of electro-hydraulic servo[J]. Chinese Hydraulics & Pneumatics, 2004(8): 36-38.
[8] 王占林. 近代液压控制[M]. 北京: 机械工业出版社, 1997: 52-80.
WANG Zhan-lin. Modern hydraulic control[M]. Beijing: China Machine Press, 1997: 52-80.
[9] 路甬祥. 液压气动技术手册[M]. 北京: 机械工业出版社, 2002: 152-190.
LU Yong-xiang. Hydraulics & pneumatics technical manual[M]. Beijing: China Machine Press, 2002: 152-190.
[10] 吴根茂. 实用电液比例技术[M]. 浙江: 浙江大学出版社, 2000: 57-100.
WU Gen-mao. Practical electro-hydraulic proportional technology[M]. Zhejiang: Zhejiang University Press, 2000: 57-100.
[11] 陶永华. 新型PID控制及其应用[M]. 北京: 机械工业出版社, 1999: 46-79.
TAO Yong-hua. New type PID control and its application[M]. Beijing: China Machine Press, 1999: 46-79.
[12] 张尚盈, 赵慧, 韩俊伟. 六自由度运动平台实时控制的正/反解算法[J]. 机床与液压, 2003(3): 133-136.
ZHANG Shang-ying, ZHAO Hui, HAN Jun-wei. Direct and reverse algorithms for real-time control of 6-DOF platform[J]. Machine Tool & Hydraulics, 2003(3): 133-136.
[13] 杨宏兵, 高荣慧, 李兵. 六自由度并联机器人的运动学分析与仿真[J]. 机床与液压, 2004(8): 81-82.
YANG Hong-bing, GAO Rong-hui, LI Bing. Kinematic analysis and simulation of six-DOF parallel robot[J]. Machine Tool & Hydraulics, 2004(8): 81-82.
(编辑 陈灿华)
收稿日期:2011-06-15;修回日期:2011-07-15
基金项目:国家“十一五”深海技术发展专项基金资助项目(DYXM-115-04-02-01)
通信作者:郑皓(1981-),男,江西上饶人,博士研究生,从事深海作业装备设计与控制研究;电话:13786187617;E-mail: buddyhappy@126.com

