DOI: 10.11817/j.issn.1672-7207.2019.09.008
一种新型并联灌注机器人动力学分析与仿真
杨会1,房海蓉1, 2,方跃法1, 2
(1. 北京交通大学 机械与电子控制工程学院,北京,100044;
2. 北京交通大学 载运工具先进制造与测控技术教育部重点实验室,北京,100044)
摘要:针对用于大型航天器防热层灌注的3PSS-PU并联灌注机器人,进行动力学分析与仿真验证。建立并联机构逆运动学模型,通过对数学模型求导,分别求解并联机构驱动滑块和连杆的速度、加速度与动平台速度、加速度之间的映射关系,得到并联机构的支链雅克比矩阵。在此基础上,利用虚功原理建立并联机构的动力学模型,并通过Mathematica和Adams软件,在动平台沿zb轴移动和沿yb轴转动2种运动轨迹下,分别对比3个驱动滑块的位移、速度、加速度以及驱动力等运动参数的理论曲线和仿真变化曲线。研究结果表明:所建立并联机构运动学和动力学模型正确,并联机构不仅具有良好的移动性能,而且具有较好的转动性能,为并联灌注机构动力学性能进一步研究以及控制系统的设计提供了理论依据。
关键词:并联灌注机器人;雅克比矩阵;动力学;虚功原理;数值仿真
中图分类号:TH112 文献标志码:A 文章编号:1672-7207(2019)09-2118-10
Dynamics analysis and simulation of a novel parallel perfusion robot
YANG Hui1, FANG Hairong1, 2, FANG Yuefa1, 2
(1. School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China;
2. Key Laboratory of Vehicle Advanced Manufacturing, Measuring and Control Technology, Ministry of Education, Beijing Jiaotong University, Beijing100044, China)
Abstract: For the 3PSS-PU parallel perfusion robot used for the thermal protection layer perfusion of the large-scale spacecraft, the analysis of dynamics and numerical simulation were conducted. The inverse kinematics model was established. Through the derivation of the mathematical model, the mapping relationship between the velocity and the acceleration of the driving slider and the link and the velocity and acceleration of the moving platform was derived. And the link Jacobian matrix of the mechanism was also obtained. On this basis, the dynamics model of the parallel mechanism was established by using the principle of virtual work. With the Mathematica and Adams software, the theoretical and simulation curves of the displacement, velocity, acceleration and driving force of each driving joint formed when the moving platform moves along the zb axis and rotates about yb axis were compared, respectively. The results show that the kinematics and dynamics model of the parallel mechanism is correct, and the parallel mechanism not only has good mobile performance but also has good rotation performance. The above studies provide important theoretical basis for the further study of the dynamics performance and the design of the control system of the parallel perfusion mechanism.
Key words: parallel perfusion robot; Jacobian matrix; dynamics; principle of virtual work; numerical simulation
航天器进入和返回太空阶段时会受到巨大的加热效应,影响飞行员的安全和机载仪器的正常运转,因此,通常在航天器的外部铺设防热层结构[1-3],并通过对防热层结构进行防热材料灌注以实现其热防护功能[4-5]。目前,国内外防热层灌注主要采用手动进行,但该灌注方式效率较低,为提高防热层灌注的效率,提出一种新型3PSS-PU并联灌注机器人来实现防热材料的自动灌注作业。杨会等[6]对3PSS-PU并联灌注机器人进行了详细的运动学分析和多目标优化设计。动力学模型建立是并联机构动力学分析的基础,目前,常用的动力学建模方法主要有牛顿欧拉法[7-10]、拉格朗日法[11-15]和虚功原理[16-19]等,学者们利用不同方法对并联机构的动力学进行了研究,ZHANG等[20]利用牛顿欧拉法对一种新型三自由度并联机床进行了动力学分析,通过求解多个联立方程,得到了相关力的解析表达式;基于拉格朗日方法,PANG等[21]针对一种三自由度并联操作器进行了逆动力学的分析,通过引入拉格朗日乘子并逐步消除得到了控制方程,并进行数值算例仿真证明了动力学模型建立的正确性;丁希仑等[22]基于旋量理论对六腿步行机器人的杆件位置、速度及能量进行描述,并应用拉格朗日方程建立了机器人完整的动力学模型;ZHAO等[23-24]利用虚功原理对8PSS冗余并联操作器进行了动力学分析,并提出多种动力学性能指标对机构进行了性能评价。这些方法是动力学建模最常用的方法,并具有各自的特点,其中,利用牛顿欧拉法建模过程中,会出现较多的内力和约束力,需要通过求解大量联立的方程才可得到驱动力的解析表达式,计算过程比较复杂;对于拉格朗日建模的方法,则需要对动力学函数进行求导,多适用于简单机构构型的建模,针对相对复杂的机构,其运算量较大,不易获得驱动力的解析表达式;而虚功原理则将机构作为一个整体考虑,不需要求解机构的内力,建模简单有效,是一种计算效率比较高的求解算法。本文作者以三自由度3PSS-PU并联灌注机器人为研究对象,通过对封闭环矢量方程进行求导,求得并联机构以及各个运动支链的速度、加速度雅可比矩阵;利用虚功原理,建立了并联机构动力学数学模型;在动平台不同运动轨迹下,通过Mathematica和Adams分别对驱动滑块的位移、速度、加速度和驱动力进行对比分析,验证了并联机构动力学模型的正确性,为灌注机构在灌注过程中驱动滑块驱动力变化情况的研究提供了理论基础,同时对于实现灌注机器人控制、提高灌注精度以及研究机构运动平稳性等具有理论意义。
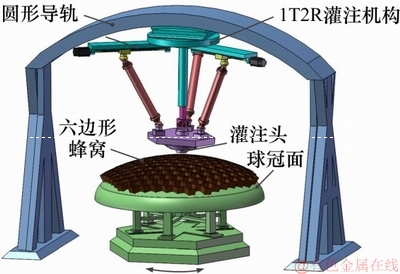
图1 混联机器人灌注系统
Fig. 1 Hybrid perfusion robot system
1 机构描述与坐标系建立
混联灌注机器人系统如图1所示,主要包括3PSS-PU并联机构、圆弧导轨和工作台,其中3PSS-PU并联机构可沿圆弧导轨运动,工作台可绕自身轴线转动,通过两者的协作运动使得灌注机构末端操作器能够实现蜂窝球冠面所有位置的定位。3PSS-PU并联机构的三维模型如图2所示,主要由定平台、动平台、3个完全相同的主动支链PSS和1个被动支链PU组成,且主动支链均匀分布在定平台上,该支链依次由移动副(P)和2个球面副(S)组成,每个移动副通过直线电机驱动;被动支链由移动副(P)和虎克铰(U)组成,且U副与动平台相连接。由于每条主动支链自由度为6,对动平台不提供约束,故动平台与中间被动支链具有相同的自由度,即动平台具有沿xb轴和yb轴的转动自由度以及沿zb轴的移动自由度。

图2 3PSS-PU并联机构三维模型
Fig. 2 3D model of 3PSS-PU parallel mechanism
3PSS-PU机构运动简图如图3所示,其中,B1,B2和B3分别代表3个移动副;M1,M2和M3分别代表动平台上3个球副;N1,N2和N3分别代表与P副相连的3个球副;B4和M分别代表中间支链的P副和U副;固定坐标系O-xbybzb建立在定平台的中心O点;轴线xb沿导轨OB1的正方向;轴线 竖直向下;动坐标系M-xmymzm建立在M点,且轴线xm沿直线MM1的正方向;轴线zm竖直向下;si (i=1~3)为第i个P副移动的距离;li为支链NiMi长度;Rm为MMi的长度;
竖直向下;动坐标系M-xmymzm建立在M点,且轴线xm沿直线MM1的正方向;轴线zm竖直向下;si (i=1~3)为第i个P副移动的距离;li为支链NiMi长度;Rm为MMi的长度; 为直线OBi与xb轴正方向的夹角,
为直线OBi与xb轴正方向的夹角, ;
; 为直线OMi与轴xm正方向的夹角,
为直线OMi与轴xm正方向的夹角, 。
。
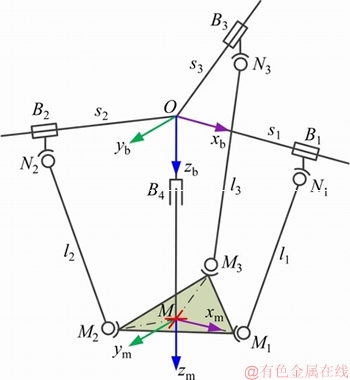
图3 3PSS-PU机构运动简图
Fig. 3 Kinematic diagram of 3PSS-PU mechanism
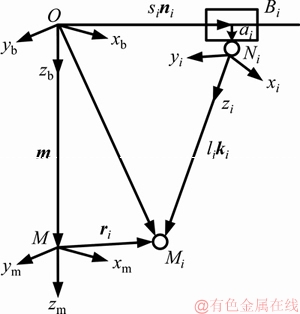
图4 第i条PSS支链的矢量图
Fig. 4 Vector diagram of the ith PSS branch
2 运动学分析
第i条PSS支链的矢量图如图4所示,动平台的位置矢量由m表示,动坐标系M-xmymzm相对于定坐标系O-xbybzb的旋转矩阵由 表示,通过X-Y-Z固定角坐标系来定义旋转矩阵,即先绕xb旋转角度α,再绕yb旋转角度β,最后绕zb旋转角度γ,则
表示,通过X-Y-Z固定角坐标系来定义旋转矩阵,即先绕xb旋转角度α,再绕yb旋转角度β,最后绕zb旋转角度γ,则

 (1)
(1)
式中:
由于3PSS-PU并联机构只有绕xb和yb的2个转动自由度和沿zb的1个移动自由度, ,
, ,
, ,
,
 (2)
(2)
故动平台的位置矢量m可表示为
 (3)
(3)
动平台的角速度矢量ωm可表示为
 (4)
(4)
为方便分析,在Ni点建立第i个PSS主动支链的局部坐标系Ni-xiyizi,其中,zi的方向沿杆NiMi的方向,该局部坐标系相对于定坐标系可通过2个欧拉角来描述,如图5所示,将固定坐标系绕zb轴旋转 角度得到新坐标系
角度得到新坐标系 ,再将新坐标系绕
,再将新坐标系绕 轴旋转
轴旋转 角度,即可得到坐标系Ni-xiyizi,则第i条支链局部坐标系Ni-xiyizi相对于定坐标系O-xbybzb的旋转矩阵为
角度,即可得到坐标系Ni-xiyizi,则第i条支链局部坐标系Ni-xiyizi相对于定坐标系O-xbybzb的旋转矩阵为

 (5)
(5)
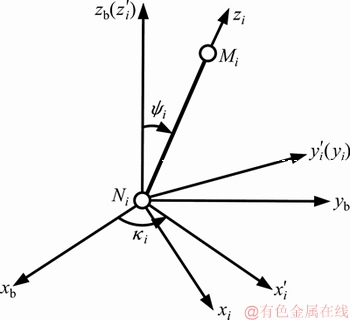
图5 第i条驱动滑块的局部坐标系
Fig. 5 Local coordinate system of the ith driving slider
在固定坐标系O-xbybzb下,沿支链NiMi方向的单位向量ki可表示为
 (6)
(6)
因此,欧拉角和分别可表示为:
 ;
;
 (7)
(7)
式中: 。
。
2.1 位置分析
如图4所示,第i条PSS支链的封闭环矢量方程可表示为
 (8)
(8)
式中,i=1,2,3;ri为向量 ;si为第i个滑块的位移;ni为沿滑块移动方向的单位向量;ai为运动副Bi中心点到运动副Ni中心点的向量。
;si为第i个滑块的位移;ni为沿滑块移动方向的单位向量;ai为运动副Bi中心点到运动副Ni中心点的向量。
由此,可得出并联机构的运动学反解:
 (9)
(9)
2.2 速度分析
对式(8)左右两边同时对时间t求导得:
 (10)
(10)
式中: ,为动平台的线速度矢量。
,为动平台的线速度矢量。
对式(10)两边同时点乘向量ki,则可得出第i个驱动滑块的速度 为
为
 (11)
(11)
将各个驱动滑块的速度表示为矩阵形式:
 (12)
(12)
式中: ;
; ;
; ;
; 。
。
因此,动平台速度矢量 与驱动滑块速度矢量
与驱动滑块速度矢量 之间的速度雅可比矩阵可表示为
之间的速度雅可比矩阵可表示为
 (13)
(13)
2.3 支链速度分析
在局部坐标系Ni-xiyizi中,点Mi的线速度可表示为
 (14)
(14)
由于 ,对式(14)两边叉乘向量
,对式(14)两边叉乘向量 ,可得到Ni-xiyizi坐标系下支链NiMi的角速度为
,可得到Ni-xiyizi坐标系下支链NiMi的角速度为

 (15)
(15)
式中: 。
。
将式(11)和(14)代入式(15),可得出支链NiMi的角速度为
 (16)
(16)
式中: 。
。
根据式(14)和式(16),Ni-xiyizi坐标系下支链NiMi质心的线速度可表示为
 (17)
(17)
将支链NiMi质心的线速度和角速度写成矩阵形式:
 (18)
(18)
式中: 为定坐标系O-xbybzb下动平台的速度矢量与Ni-xiyizi坐标系下支链NiMi的速度矢量之间映射关系的支链速度雅克比矩阵。
为定坐标系O-xbybzb下动平台的速度矢量与Ni-xiyizi坐标系下支链NiMi的速度矢量之间映射关系的支链速度雅克比矩阵。
2.4 加速度分析
对式(10)左右两边同时对时间t求导得:

 (19)
(19)
对式(19)两边同时点乘 并化简,可得到第i个驱动滑块的加速度
并化简,可得到第i个驱动滑块的加速度 为
为
 (20)
(20)
由此,将所有驱动滑块的加速度表示为矩阵形式:
 (21)
(21)
式中:





2.5 支链加速度分析
对式(14)左右两边同时对时间t求导得:

 (22)
(22)
对式(22)两边同时叉乘并化简,可得到第i个驱动滑块的加速度:

 (23)
(23)
式(23)可化简为
 (24)
(24)
式中:
对式(17)两边同时对时间t求导得:


 (25)
(25)
将式(24)代入式(25),并化简可得:
 (26)
(26)
式中: 。
。
3 动力学分析
3.1 外力和惯性力系统
对于动平台,在固定坐标系O-xbybzb下,施加在其质心上的外力和惯性力可表示为
 (27)
(27)
式中: 和
和 分别为作用在动平台质心上的外力和外力矩;mm为动平台的质量;
分别为作用在动平台质心上的外力和外力矩;mm为动平台的质量; m/s2;
m/s2; ,IM为动坐标系M-xmymzm下动平台对其质心的惯性矩阵。
,IM为动坐标系M-xmymzm下动平台对其质心的惯性矩阵。
式(27)的受力系统QM可划分为4个部分:加速度项QMA,速度项QMV,重力项QMG和外力项QME,
 (28)
(28)
对于运动支链NiMi,在局部坐标系Ni-xiyizi下,作用在其质心上的力系统可表示为
 (29)
(29)
式中: 表示杆NiMi的质量;
表示杆NiMi的质量; 表示在局部坐标系Ni-xiyizi下支链NiMi对其质心的惯性矩阵。
表示在局部坐标系Ni-xiyizi下支链NiMi对其质心的惯性矩阵。
同样地,受力系统 也可以划分为加速度项
也可以划分为加速度项 ,速度项
,速度项 ,重力项
,重力项 :
:


 (30)
(30)
对于驱动滑块,在固定坐标系O-xbybzb下,其质心所受到的力可表示为

 (31)
(31)
式中:msi为第i个驱动滑块的质量,FAi,FVi和FGi分别为受力系统 的加速度项、速度项和重力项。
的加速度项、速度项和重力项。
对于中间被动支链,由于移动副B4只有沿zb轴的移动自由度,因此,在固定坐标系O-xbybzb下,施加在移动杆质心上的力可表示为
 (32)
(32)
式中:mp表示中间运动杆件的质量;FAp和FGp分别为运动杆件所受力Fp的加速度项和重力项; ;
; ;
; 。
。
3.2 动力学方程建立
假设并联机构的动平台在其工作空间内具有虚位移,因此,基于虚功原理,并联机构的动力学方程表示如下:

 (33)
(33)
式中: ,表示并联机构3个驱动滑块所受驱动力的矩阵;δP和
,表示并联机构3个驱动滑块所受驱动力的矩阵;δP和 分别为动平台和第i个驱动滑块的虚位移;
分别为动平台和第i个驱动滑块的虚位移; 为Ni-xiyizi坐标系下第i个支链NiMi的虚位移。
为Ni-xiyizi坐标系下第i个支链NiMi的虚位移。
表1 并联机构各构件质量
Table 1 Mass of each component of parallel mechanismkg

根据2.3节中机构支链速度雅克比的分析,以上虚位移参数可通过动平台虚位移参数δP来表示:

 ;
;
 (34)
(34)
将式(34)代入式(33)的动力学方程中可得:

 (35)
(35)
对式(35)进行化简,得到并联机构逆动力学的表达式为



 (36)
(36)
式中: 表示
表示 的逆矩阵。
的逆矩阵。
4 仿真验证
为验证并联机构运动学和动力学模型建立的正确性,分别通过Mathmatica和Adams软件对驱动滑块的运动参数进行理论和仿真曲线的对比分析。由于并联机构同时具有移动和转动自由度,因此,分别对动平台沿zb轴移动和沿yb轴转动2种特定运动轨迹下驱动滑块的运动参数进行仿真实验验证。表1所示为并联机构各构件的质量,且各构件的惯性矩阵如下:
 (37)
(37)
式中:各构件惯性矩阵元素的单位均为kg・m2。
动平台受到的外力fm和外力矩nm可表示为
 (38)
(38)
式中:fm的单位为N; 的单位为N・m。
的单位为N・m。
对于沿zb轴移动的仿真运动,给定动平台运动轨迹为从(0, 0, 540) mm到(0, 0, 440) mm的纯直线运动,假设在动平台的运动过程中构件之间不存在刚性冲击和柔性冲击,因此,动平台的运动可以描述为
 (39)
(39)
动平台沿zb轴移动运动时3个驱动滑块的位移、速度、加速度和驱动力理论曲线和仿真曲线的对比如图6~9所示。由图6~9可知,驱动滑块的位移、速度、加速度和驱动力的理论曲线和仿真曲线分别具有相同的趋势,且所有运动曲线平滑无尖点,表明运动学和动力学模型的正确性以及机构具有较好的移动运动性能。此外,3个驱动滑块的位移、速度和加速度曲线分别相同,符合动平台沿zb轴移动时滑块的运动规律。
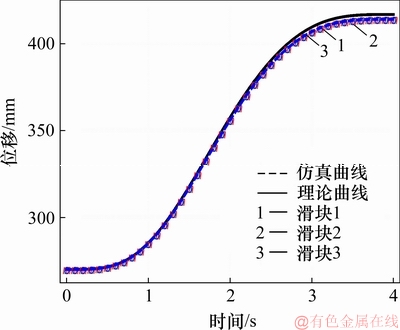
图6 驱动滑块沿zb轴移动的位移对比曲线
Fig. 6 Comparison curves of displacement for driving sliders under rotation about zb axis
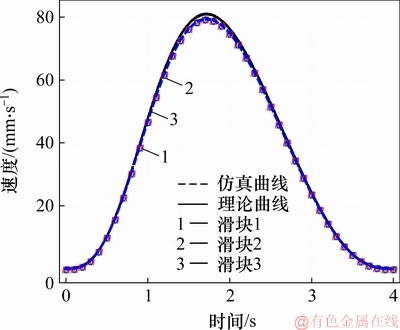
图7 驱动滑块沿zb轴移动的速度对比曲线
Fig. 7 Comparison curves of velocity for driving sliders under rotation about zb axis
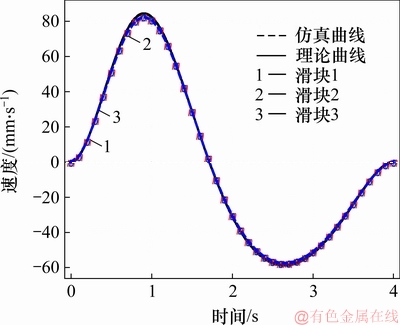
图8 驱动滑块沿zb轴移动的加速度对比曲线
Fig. 8 Comparison curves of acceleration for driving sliders under rotation about zb axis
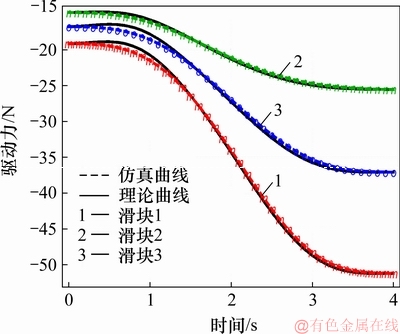
图9 驱动滑块沿zb轴移动的驱动力对比曲线
Fig. 9 Comparison curves of driving force for driving sliders under rotation about zb axis
然而,对于转动运动的仿真,给定动平台运动轨迹为绕yb轴0~0.4 rad的纯转动运动,其转动轨迹可表示为
 (40)
(40)
动平台沿yb轴转动时3个驱动滑块的位移、速度、加速度和驱动力的理论曲线和仿真曲线对比如图10~13所示。
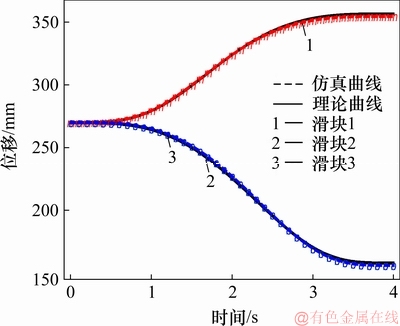
图10 驱动滑块沿yb轴转动的位移对比曲线
Fig. 10 Comparison curves of displacement for driving sliders under rotation about yb axis
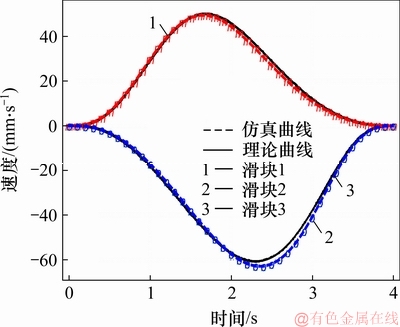
图11 驱动滑块沿yb轴转动的速度对比曲线
Fig. 11 Comparison curves of velocity for driving sliders under rotation about yb axis
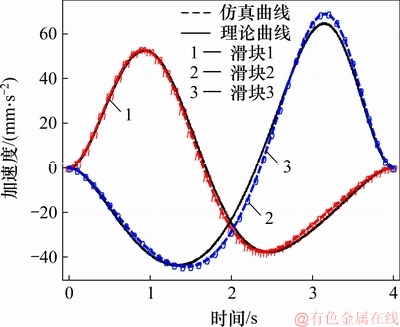
图12 驱动滑块沿yb轴转动的加速度对比曲线
Fig. 12 Comparison curves of acceleration for driving sliders under rotation about yb axis
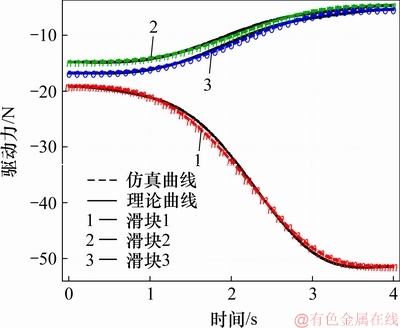
图13 驱动滑块沿yb轴转动的驱动力对比曲线
Fig. 13 Comparison curves of driving force for driving sliders under rotation about yb axis
由图10~13可知:3个驱动滑块所有运动参数的理论和仿真曲线都分别具有相同的变化趋势,且运动曲线平滑无尖点,证明了运动学和动力学模型的正确性以及机构具有较好的转动运动性能。此外,由于与动平台相连U副的其中1个转动副与xb轴重合,且xb轴沿第1个驱动滑块移动的方向,因此,根据机构的对称性可知,当动平台绕yb轴转动时,第2和第3个驱动滑块应具有相同的移动位移;而仿真曲线中第2和第3个驱动滑块的位移、速度和加速度曲线均分别相同,再次验证了运动学模型建立的正确性。
综上所述,通过对驱动滑块位移、速度、加速度和驱动力理论和仿真曲线的对比分析,验证了并联灌注机器人运动学和动力学模型的正确性,同时,基于机构纯移动和纯转动运动的仿真,其良好的运动性能也得到了证明。根据并联机构的运动特点,驱动滑块各运动参数的理论与仿真曲线之间的误差主要是由移动和转动运动的耦合以及运动副之间的装配间隙产生的。
5 结论
1) 以3PSS-PU新型并联灌注机器人为研究对象,利用虚功原理对机构整体进行了动力学分析与仿真实验研究。
2) 在已建立局部坐标系的基础上,采用矢量法对机构各构件的速度和加速度进行了分析,最终得到了机构各构件速度、加速度与动平台速度、加速度之间的雅克比矩阵。
3) 基于虚功原理以及各构件之间雅可比矩阵的关系,建立了机构的动力学模型,利用Mathematica和Adams软件,得到了机构在平动和转动运动时驱动滑块的位移、速度、加速度和驱动力的理论和仿真变化曲线。
4) 理论和仿真曲线的对比结果验证了所建立机构运动学、动力学模型的正确性,为并联灌注机器人机构动力学性能进一步的研究以及控制系统的设计奠定了基础。
参考文献:
[1] ACKERMAN P K, BAKER A L, NEWQUIST C W. Thermal protection system: US, 5322725[P]. 1994-06-21.
[2] WU Dafang, ZHOU Anfeng, ZHENG Liming, et al. Study on the thermal protection performance of superalloy honeycomb panels in high-speed thermal shock environments[J]. Theoretical and Applied Mechanics Letters, 2014, 4(2):6-19.
[3] 程文礼, 袁超, 邱启艳, 等. 航空用蜂窝夹层结构及制造工艺[J]. 航空制造技术, 2015(7): 94-98.
CHENG Wenli, YUAN Chao, QIU Qiyan, et al. Honeycomb sandwich structure and manufacturing process in aviation industy[J]. Aeronautical Manufacturing Technology, 2015(7): 94-98.
[4] 卢杰持, 王春, 钱名海. 航天大型蜂窝复合材料构件的配合型面加工技术[J]. 机械工程学报, 1999, 35(1): 65-67.
LU Jiechi, WANG Chun, QIAN Minghai. Technique of manufacturing matching surfaces of the aerospace large scale honeycomb complex material structure[J]. Chinese Journal of Mechanical Engineering, 1999, 35(1): 65-67.
[5] 郑力铭, 吴大方, 王岳武, 等. 金属蜂窝板高温环境下的隔热性能试验与计算[J]. 北京航空航天大学学报, 2012, 38(6): 731-735.
ZHENG Liming, WU Dafang, WANG Yuewu, et al. Experiment and numerical simulation on heat-shielding properties of metallic honeycomb panel in high temperature environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(6): 731-735.
[6] 杨会, 房海蓉, 李典, 等. 一种新型并联灌注机器人运动学分析和多目标优化[J]. 北京航空航天大学学报, 2018, 44(3): 568-575.
YANG Hui, FANG Hairong, LI Dian, et al. Kinematics analysis and multi-objective optimization of a novel parallel perfusion robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 568-575.
[7] SHAO Zhufeng, TANG Xiaoqiang, WANG Liping. Dynamics verification experiment of the Stewart parallel manipulator[J]. International Journal of Advanced Robotic Systems, 2015, 12(10): 144.
[8] HARIB K, SRINIVASAN K. Kinematic and dynamic analysis of Stewart platform-based machine tool structures[J]. Robotica, 2003, 21(5): 541-554.
[9] OFTADEH R, AREF M M, TAGHIRAD H D. Explicit dynamics formulation of Stewart-Gough platform: a Newton-Euler approach[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York, USA: IEEE, 2010: 2772-2777.
[10] PEDRAMMEHR S, DANAEI B, ABDI H, et al. Dynamic analysis of Hexarot: axis-symmetric parallel manipulator[J]. Robotica, 2018, 36(2):16.
[11] 刘乃军, 牛军川. 2-PRC-PR(C)并联机构减振平台及其动力学特性[J]. 中南大学学报(自然科学版), 2017, 48(4): 925-935.
LIU Naijun, NIU Junchuan. 2-PRC-PR(C) parallel mechanism platform for vibration isolation and its dynamics[J]. Journal of Central South University(Science and Technology), 2017, 48(4): 925-935.
[12] 陈斌, 宗光华, 于靖军, 等. 一种2-DOF类球面并联转台的动力学建模及分析[J]. 机械工程学报, 2013, 49(13): 24-31.
CHEN Bin, ZONG Guanghua, YU Jingjun, et al. Dynamic modeling and analysis of 2-DOF quasi-sphere parallel platform[J]. Journal of Mechanical Engineering, 2013, 49(13): 24-31.
[13] STAICU S. Dynamics of the 6-6 Stewart parallel manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2011, 27(1): 212-220.
[14] LEE S S, LEE J M. Design of a general purpose 6-DOF haptic interface[J]. Mechatronics, 2003, 13(7): 697-722.
[15] YAO Jiantao, GU Weidong, FENG Zongqiang, et al. Dynamic analysis and driving force optimization of a 5-DOF parallel manipulator with redundant actuation[J]. Robotics and Computer-Integrated Manufacturing, 2017, 48: 51-58.
[16] MO Jiao, SHAO Zhufeng, GUAN Liwen, et al. Dynamic performance analysis of the X4 high-speed pick-and-place parallel robot[J]. Robotics and Computer-Integrated Manufacturing, 2017, 46: 48-57.
[17] 胡波, 路懿, 许佳音, 等. 新型过约束并联机构2RPU+UPU动力学模型[J]. 机械工程学报, 2011, 47(11): 36-43.
HU Bo, LU Yi, XU Jiayin, et al. Solving kinematics for a novel over-constrained 2UPR+UPU parallel manipulator[J]. Journal of Mechanical Engineering, 2011, 47(11): 36-43.
[18] ZHU Zhenqi, LI Jinsong, GAN Zhongxue, et al. Kinematic and dynamic modelling for real-time control of Tau parallel robot[J]. Mechanism and Machine Theory, 2005, 40(9): 1051-1067.
[19] ZHANG Dongsheng, XU Yundou, YAO Jiantao, et al. Design of a novel 5-DOF hybrid serial-parallel manipulator and theoretical analysis of its parallel part[J]. Robotics and Computer-Integrated Manufacturing, 2018, 53: 228-239.
[20] ZHANG Dan, BI Zhuming, LI Beizhi. Design and kinetostatic analysis of a new parallel manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2009, 25(4/5): 782-791.
[21] PANG H, SHAHINPOOR M. Inverse dynamics of a parallel manipulator[J]. Journal of Robotic Systems, 1994, 11(8): 693-702.
[22] 丁希仑, 李可佳, 徐坤. 基于旋量理论的弹性关节六腿机器人动力学分析[J]. 中南大学学报(自然科学版), 2011, 42(s1): 589-595.
DING Xilun, LI Kejia, XU Kun. Dynamics analysis of six-legged robot with elastic joints using screw theory[J]. Journal of Central South University (Science and Technology), 2011, 42(s1): 589-595.
[23] ZHAO Yongjie, QIU Ke, WANG Shuangxi, et al. Inverse kinematics and rigid-body dynamics for a three rotational degrees of freedom parallel manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2015, 31: 40-50.
[24] ZHAO Yongjie, GAO Feng. Dynamic formulation and performance evaluation of the redundant parallel manipulator[J]. Robotics and Computer-Integrated Manufacturing, 2009, 25(4/5): 770-781.
(编辑 赵俊)
收稿日期: 2018 -11 -21; 修回日期: 2019 -03 -13
基金项目(Foundation item):中央高校基本科研业务费专项资金资助项目(2018JBZ007);国家自然科学基金资助项目(51675037) (Project(2018JBZ007) supported by the Fundamental Research Funds for the Central Universities; Projects(51675037) supported by the National Natural Science Foundation of China)
通信作者:房海蓉,博士,教授,从事机器人机构学研究;E-mail:hrfang@bjtu.edu.cn

