飞机防滑刹车系统的智能故障诊断与重构
廖力清1,段凌飞1,熊翔2,王颂3
(1. 中南大学 信息科学与工程学院,湖南 长沙,410083)
(2. 中南大学 粉末冶金研究院,湖南 长沙,410083)
(3. 空军驻长沙地区军事代表室,湖南 长沙,410111)
摘 要:针对目前飞机在起飞着陆过程中故障率高的问题,设计一种交叉冗余飞机防滑刹车系统的智能故障诊断与重构系统。该系统基于BP神经网络专家系统,利用专家先验知识、神经网络的数值推理和自学习能力对飞机刹车过程出现的故障进行分析和建模,继而准确推断和定位故障;通过对系统信号流向优先级建立对应加权有向图模型,采用寻找最短路径的算法对系统进行优化重构,从而使飞机刹车系统达到更高的安全水平。研究结果证明:在刹车过程中,给定随机故障后,系统能迅速、准确地判断和定位故障并实时重构系统,达到1次和部分2次故障时能正常工作且保证工作性能的设计目标。
关键词:BP神经网络;专家系统;故障诊断;加权有向图形;系统重构
中图分类号:V227+.5 文献标志码:A 文章编号:1672-7207(2010)01-0207-06
Intelligent fault diagnosis and reconstruction of dual anti-skid braking system in aircraft
LIAO Li-qing1, DUAN Ling-fei1, XIONG Xiang2, WANG Song3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Institute of Powder Metallurgy Research, Central South University, Changsha 410083, China;
3. Airforce Stationed in Changsha Military Deputation, Changsha 410111, China)
Abstract:Owing to the fact that the latest developed dual anti-skid braking system can easily cause accident after the system has some faults but it cannot reconstruct the system rapidly, an intellectual fault diagnosis and reconstruction crossing dual braking system was designed. This system was based on the BP neural network with expert system, using the expert’s knowledge, numeric capacity and self-learning to analyze the fault and make a model of the system to get the exact position of the fault. After knowing the fault position, a weighted direct graph model of system which depended on the priority circuit was made to optimize and reconstruct the system through seeking the shortest circuit arithmetic, then the braking system could be operated safely after faults occurred. The results show that when some random faults are generated, the system can estimate the fault and reconstruct the system rapidly. It can make the system safe when part faults occur.
Key words: BP neural network; expert system; fault diagnosis; weighted direct graph; system reconstruction
飞机刹车控制系统对飞机安全着陆至关重要。为使飞机刹车具有较高的刹车效率和较短的刹车距离,国内外大部分飞机刹车系统已采用数字式防滑刹车系统。国外余度刹车技术中,A320的正常刹车防滑、备份刹车防滑、备份刹车无防滑加应急刹车的冗余模式,在遇到1次故障时仍能工作,但其性能大大下降。而号称四代机的美国F-22中基于公用机电平台的双余度刹车控制系统,其特点是在1次甚至2次故障时仍能工作且可以保证工作性能。目前国内航空机轮刹车系统中,防滑刹车控制大多采用单余度加应急刹车结构。即使采用双通道,如果正常通道与备份通道同时出现故障,也只能通过人工切换应急刹车操作,从而使刹车效率和安全性能急剧下降。而在双余度中,其故障点的判断较三、四余度的判断更加困难,2个信号在无明显故障的迹象下,很难推断出故障信号。针对国内当前飞机防滑刹车系统的不足,本文作者设计了基于BP神经网络专家系统的智能故障诊断与重构的交叉双冗余防滑刹车系统。该系统在原来的主、备系统基础上建立一种信号交叉检查模式,即将具有双冗余的指令、速度等信号同时接入控制器A和B采集,控制器择优选取有效信号。在交叉检测诊断后通过“先判断故障,后定位故障,继而处理故障”的策略,采用“永不放弃”原则迅速定位故障和重构系统,完成正常防滑刹车过程[1-2]。
1 智能故障诊断与重构防滑刹车系统
1.1 系统组成
智能故障诊断与重构防滑刹车系统是基于BP神经网络专家系统智能故障诊断的交叉双冗余结构防滑刹车系统,其系统结构框图如图1所示。双冗余刹车控制器采用“主控+监控热备份”结构,2个控制器采用完全相同的硬件结构、不同的刹车算法,在一定程度上克服了共模故障,又不使系统结构复杂。

图1 基于BP神经网络的智能故障诊断与重构刹车系统
Fig.1 Intelligent fault diagnosis and reconstruction antiskid braking system
图1中,A和B控制器互为热备份,双机通讯用于实时数据交换,由仲裁机构A和B决定A和B控制器的输出控制主权,并互相判定对方的故障。控制器A和B实时采集速度、指令传感器信号、阀的输出信号等,采集后送往专家系统对数据进行分析,提供相应诊断结果。
1.2 基于BP神经网络的专家系统构成
专家系统本身存在知识获取难、知识台阶窄、不适于模糊推理等问题。本系统通过改进后,采用基于规则树的专家系统结合改进的反向误差最小化方法进行学习推理的神经网络,通过对各种现象和实时现场采集的数据进行分析判断,在人机界面上提供相应的诊断结果。系统总体结构如图2所示。
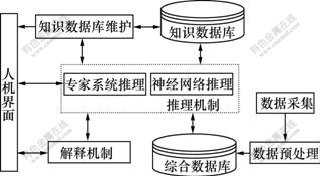
图2 基于BP神经网络的专家系统
Fig.2 Expert system based on BP neural network
在经过充分的训练之后,将图2中的知识数据库、推理机制、综合数据库、数据预处理整合到刹车系统中,构成基于BP神经网络的专家系统的智能诊断系统[3-4]。
1.3 专家系统推理
本系统以规则树的形式建立专家诊断系统,通过将专家经验知识和刹车过程中的故障知识整理编辑以规则树的形式建立专家知识库。知识库是以规则的形式建立的,对每一种规则进行编号,每一种规则代表一种故障判断结果,并在知识数据库中存储由专家提供的相应故障原因和处理办法。
规则以树的形式建立,树的根节点为故障现象,叶节点为故障原因,中间节点为推理过程中的中间环节[4]。基于故障树原理,建立刹车故障知识库树形结构,如图3所示。推理时采用人机交互询问的方式从根节点开始向下搜索,直至叶子节点为止,找出故障原因。

图3 知识库树形结构图
Fig.3 Construction of repository tree
控制器A判定A组主速度传感器故障的过程如下:首先选择速度采集通道,速度传感器采用+12 V供电,若速度电压信号传感器输出大于10 V,则判定速度传感器开路;若速度电压信号小于2 V,则传感器短路;若速度信号电压在2~10 V之间且变化率大于某设定值,则传感器内部发生故障;若A和B主、副速度冗余信号不一致,则通过将另1个控制器采集速度信号进行综合以确定故障点。
1.4 神经网络推理
由于专家系统数值推理能力比较弱,对于传感器信号异常、阀压力异常等数值推理分析诊断效果并不理想,因此,本系统采用BP神经网络作为诊断推理的另一个重要环节[5-6]。
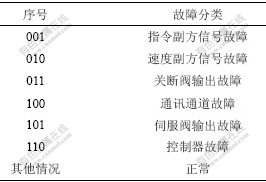
针对刹车过程故障征兆多、常见的故障有十几种等问题,考虑到神经网络的诊断速度等原因,采用多个BP神经网络分组诊断、推理[7]。不同的BP神经网络块对应刹车系统不同的测试部分,如指令传感器信号部分、速度传感器信号输出部分、通讯部分、伺服阀信号等。神经网络的输出对应不同的刹车故障分类特征值。采用3层BP网络对飞机刹车过程不良信号进行分析,其故障分类结果如表1所示。
表1 故障分类表
Table 1 Fault sorting list
针对BP神经网算法本身逼近速度低、存在局部最小点等问题,对BP算法进行改进。采用双曲正切函数作为激励函数,引入传感器信号输入项以提高学习速度[8],对是否为局部最小进行判断处理等。
每一组神经网络由3层组成,分别是输入层、隐含层、输出层,采用全连接的方式,结构如图4所示。

图4 BP神经网络结构
Fig.4 Construction of BP neural network
各个神经元的输入输出关系函数为f,本层的第j个神经元到下一层的第i个神经元的连接权值为wij,输入输出样本为{xij, yi},并设第k层、第i个神经元输入为 ,输出为
,输出为 ,则各变量之间的关系为:
,则各变量之间的关系为:

其中:k=1, 2, 3。 取为双曲正切函数:
取为双曲正切函数:
其中:a=1.715 9, b=2/3。目标函数为
其中:dj为期望输出;yj为实际输出。推导的最终目的是求H的最小值。利用非线性规划中的“快速下降法”使权值沿误差函数的负梯度方向改变,则权值修正量为:

引入传感器信号输入项,则权值修正量为:

其中: 为学习步长;?w为本次应得矫正量;
为学习步长;?w为本次应得矫正量; 为前次矫正量;
为前次矫正量; 为放大系数,0<λ<1。
为放大系数,0<λ<1。
各层的期望输出与实际输出的关系为:
 (i为输出层)
(i为输出层)
 (i为隐含层)
(i为隐含层)
求第k层的误差信号 时,需要上一层的
时,需要上一层的 ,误差函数的求取是一个始于输出层的反向传播的递归过程。对多个样本进行学习,修改权值,不断减少偏差,直到获得期望输出为止[9-10]。
,误差函数的求取是一个始于输出层的反向传播的递归过程。对多个样本进行学习,修改权值,不断减少偏差,直到获得期望输出为止[9-10]。
为了不使神经网络陷入局部最小,当学习结束时,将结果代入下式:

和
 , j=1, 2, …, N-1
, j=1, 2, …, N-1
其中:μ << 1,0<β<0.2,以判断结果是否为局部最小。若满足以上2式,则说明BP网络陷入局部最小点,需重新代入样本值进行计算。
1.5 解释机制
通过网络分块技术实现解释。采用具有层次性的多个BP网络来解决规模较大的诊断问题,故障诊断系统针对每个典型故障建立1个BP网络。将BP网络所输入的对应征兆和输入值(可信度)展示出来,即可知道故障所涉及的征兆哪些被满足,并可判断可信度和结论的可信度。
2 系统重构及恢复
系统诊断的目的是对故障进行处理,及时定位故障点,在当前控制器无法剔除故障时,通过系统重构完成刹车过程。由于系统采用电气交叉双冗余设计,使得系统重构时更加灵活,并使系统容错能力显著提高。
2.1 系统重构
系统的故障检测对象为指令传感器、速度传感器、伺服阀传感器、刹车控制器等。针对刹车系统A和B的电气流通图形,建立系统加权边有向图形模型[11],如图5所示。图中每个被检测器件如传感器、控制器等等,可以看成有向图的点(Vertices);每条信号流图可以看成有向图形的边(Edges);走过此边所在路径的代价即权值(Weighted),通过信号流通时人为认定的安全等级所确定。系统的重构即为在对应系统建立的加权有向图形中寻找1条以速度传感器和指令传感器为起点,以伺服阀为终点的最短路径问题。可以看出从①③→⑤→⑦的路径具有最小的加权值,即为最短路径。当使用路径中某一个器件出现故障时,系统重构相当于将其对应点及其所有连接的边清除后继续寻找

图5 系统的加权边有向图模型
Fig.5 Model of system made by weighted direct graph
1条最短路径[12-14]。
从图5可见:交叉冗余控制系统的硬件完全一致。若对应于控制器A的指令传感器出现故障,此时若继续采用控制器A,就需依靠控制器B对指令信号采集后通过双机通讯传入控制器A处理,通讯获取关键数据影响了系统的实时性,还增加了系统故障概率,这样的信号获取方法具有高度不可靠性。因而,通讯的权值较大。当A控制系统中出现传感器故障后,系统立即切换到B系统工作。只有在A和B系统都出现故障且故障不为同一个故障点时,才采用通讯交换关键数据的模式。系统重构的情况如表2所示,其中:“1”表示正常;“0”表示故障;“×”表示任意状态。“重构路径”见图5。
表2 系统重构表
Table 2 System reconstruct list
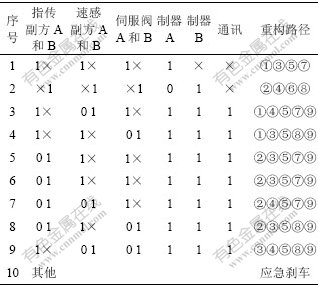
表2所示结果为按照加权值排列的信号流通路径,序号对应该路径的优先级,序号越小,表明优先级越高。表2中第1行为A系统完好无故障时的系统重构情况;第2行为A系统有故障、控制器B及其传感器正常的重构情况;第3~9行为部分一次故障或多次故障时的系统重构情况;若出现其他不在上述状态中的情况,则立即切换到应急刹车处理并且报警。在系统发生故障后,系统优先采用优先级高的路径重构系统。
2.2 系统重构算法
设i,s,v,c和t分别表示指令传感器、速度传感器、伺服阀传感器、控制器和通讯通道的状态,X表示系统故障状态;并设“1”表示正常;“0”表示故障,下标A和B表示2个系统对应的电气通路。
情况1:当且仅当系统A各个部分均正常,系统能够正常使用系统A通道时,无需与系统B通讯即可完成刹车操作,则系统工作状态表示为:

此时,X=1。
情况2:当且仅当系统B各个部分均正常,系统能够正常使用系统B通道时,无需与系统A通讯即可完成刹车操作,此时A系统故障与否无关紧要,则系统工作状态表示为:

此时,X=1。
情况3:当系统A某一点出现故障时,2个系统中至少每一种传感器有1条电气通路正常,且控制器B正常和控制器之间通讯线路畅通,系统可以完成刹车操作,则系统工作状态表示为:

此时,X=1。
综上所述,系统工作状态表达式为:


当X=1时,表示系统正常工作;当X=0时,表示系统无法正常工作,此时需要切换到应急刹车控制并且报警。情况1和2实际上是情况3的特例[15]。
3 试验结果分析
根据上述故障诊断方法和重构算法设计了智能故障诊断与重构防滑刹车系统,并在航空专用试验基地进行惯性台地面模拟试验。模拟条件为湿跑道、单轮。实验过程为:系统开始刹车5 s后立即连接右主指令传感器A与激励来模拟控制系统A的输入故障;连接伺服阀线圈B与地面来模拟控制系统B的输出故障。
在仅有主、备的控制系统中,当主、备系统同时存在故障时,控制系统无法工作,需要切换到硬件刹车。而在交叉冗余系统中,系统能完成正常刹车过程。试验结果如图6所示。

(a) 正常刹车;(b) 故障刹车
1―飞机速度;2―机轮速度;3―刹车距离;4―刹车力矩
图6 指令传感器故障试验图形
Fig.6 Experimental figures of some fault
从图6可知:当系统A出现输入故障,同时系统B出现输出故障时,系统能够及时分析故障、定位故障、重构系统来完成刹车过程。与正常刹车相比,故障刹车时的刹车效率、刹车力矩基本一致,系统的可靠性和安全性能较高。
4 结论
(1) 根据“先检测故障,后定位故障,继而处理故障”的方式,采用BP神经网络专家系统对刹车系统进行故障分析、处理,能精确地完成故障定位。
(2) 通过对系统建立的加权有向图模型来重构系统,提高了重构效率、系统的安全性和可靠性。
(3) 在控制系统A和B同时出现故障时,该刹车系统能通过系统内部通讯等方式交叉交互数据,完成正常刹车过程,而不必切换到应急刹车。此故障检测方法和重构算法在惯性台测试中,无故障刹车与故障发生后刹车的时间及刹车效率均相当,而刹车距离等有微小差别。
参考文献:
[1] 王敬亭, 廖力清, 熊翔. 基于嵌入式DSP的数字化飞机防滑刹车控制器[J]. 航空精密制造技术, 2006, 39(6): 23-26.
WANG Jing-ting, LIAO Li-qing, XIONG Xiang. Digital aircraft anti-skid breaking controller based on embeded DSP[J]. Aviation Precision Manufacture Technology, 2006, 39(6): 23-26
[2] 段琢华, 蔡自兴, 于金霞. 未知环境中移动机器人故障诊断与容错控制技术综述[J]. 机器人, 2005, 27(4): 373-378.
DUAN Zhuo-hua, CAI Zi-xing, YU Jin-xia. Fault diagnosis and fault tolerant control of mobile robots in unknown environments: A survey[J]. Robot, 2005, 27(4): 373-378.
[3] 陈维, 陈永革, 赵强. 基于BP神经网络的装备故障诊断专家系统研究[J]. 指挥控制与仿真, 2008, 30(4): 103-113.
CHEN Wei, CHEN Yong-ge, ZHAO Qiang. Analysis of fault diagnosis for equipment based on BP neural network system and expert system[J]. Command Control & Simulation, 2008, 30(4): 103-113.
[4] 张毅, 王红, 朱永波, 等. ―个基于神经网络故障诊断专家系统研究[J]. 测控技术, 2004, 23(11): 55-57.
ZHANG Yi, WANG Hong, ZHU Yong-bo, et al. Study for a fault diagnosis expert system based on artificial neutral network[J]. Measurement & Control Techniques, 2004, 23(11): 55-57.
[5] 肖元姣, 苏广川, 韩雷. 基于神经网络的电子设备故障诊断专家系统[J]. 电光与控制, 2005, 12(3): 47-49.
XIAO Yuan-jiao, SU Guang-chuan, HAN Lei. Neural network based fault diagnosis expert system for electronic equipment[J]. Electronics Optics & Control, 2005, 12(3): 47-49.
[6] Chen J, Patton R J, Lopez-Toribio C J. Fault diagnosis and fault-tolerant estimation of a rail traction system via fuzzy observers[J]. Transactions of the Institute of Measurement and Control, 1999, 21(1): 14-20.
[7] 黄赞能, 孙金峰. BP神经网络和专家系统相结合的电子设备故障诊断系统[J]. 舰船电子工程, 2008, 28(12): 152-155.
HUANG Zan-neng, SUN Jin-feng. Fault diagnostics of electronic equipments based on BP neural network and expert system[J]. Ship Electronic Engineering, 2008, 28(12): 152-155.
[8] SU Hua, Chong K T. Neural network based expert system for induction motor faults detection[J]. Journal of Mechanical Science and Technology, 2006, 20(7): 929-940.
[9] Matusko J, Petrovic I, Peric N. Neural network based tire/road friction force estimation[J]. Engineering Applications of Artificial Intelligence, 2008, 21(3): 442-456.
[10] FANG Shan-feng, WANG Ming-pu, WANG Yan-hui, et al. Evolutionary artificial neural network approach for predicting properties of Cu-15Ni-8Sn-0.4Si alloy[J]. Trans Nonferrous Met Soc China, 2008, 18(5): 1223-1228.
[11] Baric M, Petrovic I, Peric N. Neural network based sliding mode control of electronic throttle[J]. Engineering Applications of Artificial Intelligence, 2004, 18(8): 951-961.
[12] 赵刚, 江平宇. 基于加权有向图的零件聚类模型及蚁群算法实现[J]. 计算机集成制造系统, 2006, 12(7): 1007-1012.
ZHAO Gang, JIANG Ping-yu. Weighted directed graph based part clustering model[J]. Computer Integrated Manufacturing Systems, 2006, 12(7): 1007-1017.
[13] Lozovanu D, Pickl S. A constructive algorithm for max-min paths problems on energy networks[J]. Applied Mathematics and Computation, 2008(5): 83-90.
[14] 毛国勇, 张宁. 加权有向图生成算法研究及其计算机实现[J]. 上海理工大学学报, 2003, 25(3): 263-266.
MAO Guo-yong, ZHANG Ning. Algorithm and its implementation in building weighted directed graph[J]. Journal of University of Shanghai of Science and Technology, 2003, 25(3): 263-266.
[15] Bafghi A G, Safabakhsh R, Sadeghiyan B. Finding the differential characteristics of block ciphers[J]. Information Sciences, 2008, 178(15): 3118-3132.
收稿日期:2008-11-02;修回日期:2009-03-16
基金项目:国家高技术研究发展计划大型客机关键技术攻关项目(C232GR003)
通信作者:廖力清(1965-),男,湖南武冈人,教授,从事控制理论与控制工程、电气工程研究;电话:13908460442;E-mail: zdh-dqkz@mail.csu.edu.cn
(编辑 陈灿华)

