IMC-PID tuning method based on sensitivity specification for process with time-delay
��Դ�ڿ������ϴ�ѧѧ��(Ӣ�İ�)2011���4��
�������ߣ���־�� ��־Զ �ž���
����ҳ�룺1153 - 1160
Key words��process with time-delay; integrating process; internal model control-PID; robustness; sensitivity; parameters tuning
Abstract:
To overcome the deficiencies addressed in the conventional PID control and improve the dynamic performance and robustness of the system, a simple design and parameters tuning approach of internal model control-PID (IMC-PID) controller was proposed for the first order plus time-delay (FOPTD) process and the second order plus time-delay (SOPTD) process. By approximating the time-delay term of the process model with the first-order Taylor series, the expressions for IMC-PID controller parameters were derived, and they had only one adjustable parameter �� which was directly related to the dynamic performance and robustness of the system. Moreover, an analytical approach of selecting �� was given based on the maximum sensitivity Ms. Then, the robust tuning of the system could be achieved according to the value of Ms. In addition, the proposed method could be extended to the integrator plus time-delay (IPTD) process and the first order delay integrating (FODI) process. Simulation studies were carried out on various processes with time-delay, and the results show that the proposed method could provide a better dynamic performance of both the set-point tracking and disturbance rejection and robustness against parameters perturbation.
J. Cent. South Univ. Technol. (2011) 18: 1153-1160
DOI: 10.1007/s11771-011-0817-0![]()
ZHAO Zhi-cheng(��־��)1, 2, LIU Zhi-yuan(��־Զ)1, ZHANG Jing-gang(�ž���)2
1. Department of Control Science and Engineering, Harbin Institute of Technology, Harbin 150001, China;
2. Department of Automation, Taiyuan University of Science and Technology, Taiyuan 030024, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2011
Abstract: To overcome the deficiencies addressed in the conventional PID control and improve the dynamic performance and robustness of the system, a simple design and parameters tuning approach of internal model control-PID (IMC-PID) controller was proposed for the first order plus time-delay (FOPTD) process and the second order plus time-delay (SOPTD) process. By approximating the time-delay term of the process model with the first-order Taylor series, the expressions for IMC-PID controller parameters were derived, and they had only one adjustable parameter �� which was directly related to the dynamic performance and robustness of the system. Moreover, an analytical approach of selecting �� was given based on the maximum sensitivity Ms. Then, the robust tuning of the system could be achieved according to the value of Ms. In addition, the proposed method could be extended to the integrator plus time-delay (IPTD) process and the first order delay integrating (FODI) process. Simulation studies were carried out on various processes with time-delay, and the results show that the proposed method could provide a better dynamic performance of both the set-point tracking and disturbance rejection and robustness against parameters perturbation.
Key words: process with time-delay; integrating process; internal model control-PID; robustness; sensitivity; parameters tuning
1 Introduction
In spite of innovations in advanced control techniques, the PID controllers still represent, nowadays, the most popular and widely used controller in the process industry. However, it has been noticed that the conventional PID controllers may not perform well for the complex processes, such as the higher-order and time-delay systems [1]. Hence, effort has been made to systematically resolve this problem, and several effective PID controller design and tuning methods for complex processes have been reported [2]. Recently, OLIVEIRA et al [3] provided a PID controller design method for a class of time-delay processes using the Hermite-Biehler Theorem. MALWATKAR et al [4] proposed a new model based design approach of PID controllers for higher-order oscillatory processes. The method had no limitations regarding systems order, time delays and oscillatory behavior [4]. Out of all these methods, to overcome the shortcomings of conventional PID controller in Smith predictor, an analytical fuzzy PID controller tuning method was proposed for process with time-delay in Ref.[5], and the robustness of the system could be effectively improved. In addition, for integrating processes with time-delay, the latest development is the two-degree-of-freedom control methods with modified form of Smith predictor structures [6-7]. The approaches could enhance the closed loop performance. To eliminate the approximation error of the time-delay dynamics, an optimal and sub-optimal tuning method of PID controller for the process with time-delay was proposed in Refs.[8-9]. However, the optimization algorithm was more complex.
The effectiveness of the internal model control (IMC) has made this method attractive in the process industry, which has led to much effort made to exploit the IMC principle to design equivalent feedback controllers for the process with time delay. In deriving IMC-PID controller parameters, the time delay term in the process model is generally approximated as Pade series or Taylor series. Recently, SHAMSUZZOHA and LEE [10-11] presented analytical expressions of IMC-PID controller parameters by using Maclaurin series for the first order plus time-delay (FOPTD) process and the second order plus time-delay (SOPTD) process. A superior performance could be gotten. However, their tuning algorithms are complex and need more computation. IMC-PID controller tuning rules have the advantage of using a single adjustable parameter, namely the IMC filter time constant, to achieve a clear trade-off between the closed loop performance and robustness. So, finding the simple methods of obtaining the satisfactory adjustable parameter has become an important research issue. The IMC filter parameter was obtained by minimizing a weighted function of integral square error (ISE) and the maximum of the complementary sensitivity function [12]. CHEN et al [13] proposed a tuning formula to achieve a +2 dB maximum closed loop amplitude ratio. SKOGESTAD [14] proposed the SIMC tuning rules by setting the IMC filter time constant to the equivalent lag time of the process model.
Considering the mismatch between the model and the actual process, the robustness is an important feature of the closed loop system. Besides well-known gain and phase margins, the maximum sensitivity has been shown to be effective as a robustness tuning parameter. The PID controller design methods based on the maximum sensitivity have been reviewed in Ref.[15]. However, the research of parameters tuning method based on the maximum sensitivity is still relatively inadequate for IMC-PID controller. Especially, the analytical approach of obtaining the tuning parameter is still deficient.
In this work, the design of IMC-PID controller and parameters tuning based on sensitivity specification for process with time-delay is focused on. The parameters expressions of the IMC-PID controller are obtained for the typical FOPTD and SOPTD models by approximating the time-delay term with the first-order Taylor series. Further, a simple analytical approach of selecting the tuning parameter based on the maximum sensitivity is deduced, and the robust tuning of the system can easily be achieved. Because the integrator in the model of integrating process can be approximated by a first-order inertia link with a very large time constant, the proposed method can be extended to the integrator plus time-delay (IPTD) process and the first order delay integrating (FODI) process. The performances of the proposed method are compared with those of several other methods.
2 Design of IMC-PID controller for time- delay process
The block diagram of IMC system is shown in Fig.1, where Q(s) is the internal model controller, Gp(s) is the process, G(s) is the model of process, and R(s), Y(s) and D(s) are the set-point, output and external disturbance of the system, respectively.
According to the design procedure for IMC system, the model is factorized as
G(s)=G+(s)G-(s) (1)
where G-(s) and G+(s) are the portions of the model inverted and not inverted, respectively. G+(s) is usually a non-minimum phase and contains delay time and/or right half plane zeros of G(s), while G-(s) is stable and of the minimum phase. The internal model controller Q(s) can be designed as
![]() (2)
(2)
where f(s) is a low-pass filter and usually chosen as
![]() (3)
(3)
where r is sufficiently large in order to guarantee that the internal model controller Q(s) is proper. Also, �� is the time constant, determined by the expected system performance. A smaller �� can provide faster closed-loop response, while a larger �� can make the system less sensitive to model mismatches.

Fig.1 Block diagram of IMC
IMC structure shown in Fig.1 can be reduced to the equivalent classic feedback control structure shown in Fig.2. Gc(s) is a feedback controller. The relation between the feedback controller Gc(s) and the internal model controller Q(s) can be expressed as
![]() (4)
(4)
![]() (5)
(5)

Fig.2 Block diagram of feedback control
In process industry, the dynamics of a large number of controlled processes can be represented by FOPDT and SOPTD transfer function models in the forms of
![]() (6)
(6)
![]() (7)
(7)
where K represents the steady-state gain of the process, L represents the lag time, �� represents the time constant of the process, and �� represents the damping coefficient.
The IMC filter structure used here is given as
![]() (8)
(8)
So, the internal model controller can be obtained, and the corresponding feedback controller is
![]() (9)
(9)
Let the forms of the PI and PID controllers be
![]() (10)
(10)
![]() (11)
(11)
where Kp, Ti and Td are the proportional gain, the integral time constant and the derivative time constant, respectively. In order to make the resulting controller in Eq.(9) have the structure of PID controller, the time-delay term is approximated by the first order Taylor expansion:
![]() (12)
(12)
Thus, the parameters of IMC-based PI/PID controller settings for FOPDT and SOPTD models are listed in Table 1.
Table 1 Settings of controller parameters for FOPDT and SOPDT models

3 Tuning of IMC-PID controller parameter
Robustness is always of primary concern for process control when the control systems are designed and analyzed because the models used for the design of controllers are usually imprecise and the parameters of all physical systems vary with the operating conditions and time. These situations usually make the control systems deviate from the design requirement, and even make the systems unstable so that the systems cannot work normally. So, it is essential to design a controller that can ensure the closed-loop system robust to the modeling error and variations in process dynamics. Gain and phase margins are two well-known measures of robustness and simple analytical formulas to tune PI/PID controller for stable/unstable FOPDT and SOPTD models to meet user-defined gain and phase margins have been proposed. However, the gain and phase margin specifications give poor results for systems with unusual frequency response curve and may fail to give reasonable bounds on the sensitivity functions [16]. As an effective robustness measure, the maximum sensitivity (Ms) is defined as
![]() (13)
(13)
The geometric interpretation of the maximum sensitivity is shown in Fig.3. Ms is the inverse of the shortest distance from the Nyquist curve of the open loop transfer function Gc(jw)G(jw) to the critical point (-1, j0). In other words, the Nyquist curve of the open loop transfer function is tangent to a circle around the critical point with radius 1/Ms.

Fig.3 Geometric interpretation of maximum sensitivity
The relations between the maximum sensitivity and the gain and phase margin specifications could be obtained as
![]() (14)
(14)
![]() (15)
(15)
where hg and g are the gain and phase margin, respectively. Hence, the maximum sensitivity could satisfy both gain and phase margin specifications simultaneously. Further, a small value of Ms indicates that the stability margin of the control system is large. The typical values of Ms are in the range of 1.2-2.0.
In Fig.3, assume that point A is the tangent point. The condition that the Nyquist curve of open loop transfer function Gl(jw) goes through point A is
![]() (16)
(16)
The condition that the Nyquist curve meets the circle tangentially at point A can be written as
![]() (17)
(17)
where q is the angle between the negative real axis and the line through the critical point and the point A. From Eqs.(16) and (17), the nonlinear relationship between the sensitivity specification and the model can be obtained.
WANG and SHAO [17] introduced a PID controller design approach based on the maximum sensitivity specification. The basic idea was that making the controller zeros equal to the poles of the model to produce an open loop transfer function of the following form:
![]() (18)
(18)
where Kl is the open loop gain of system. Through calculations and analyses of the nonlinear relationship between the sensitivity specification and the model, the following approximating expression of parameter Kl is obtained [17]:
![]() (19)
(19)
Then, using the relationship between Kl and the PID controller parameters, the controller parameters can be analytically calculated.
From Eqs.(6) and (10) or Eqs.(7) and (11), the open loop transfer function of FOPDT and SOPTD system can be obtained as
![]() (20)
(20)
By comparing with Eq.(18) and using Eq.(19), the relationship between the adjustable parameter �� of the IMC-PID controller and the maximum sensitivity specification Ms could be expressed as
![]() (21)
(21)
So, the expression makes it is easy to find the corresponding adjustable parameter �� of the IMC-PID controller with a given sensitivity specification Ms.
4 Simulation results and analysis
The simulation study is conducted on the different types of representative model to cover several process classes. The performance of the control system could be significantly improved by the proposed design method. To demonstrate the effectiveness, the proposed approach is compared with the other existing methods, and the integral of time multiplied by absolute error (ITAE, E) criterion and the overshoot are chosen as the quantitative indices to evaluate the closed-loop performance.
The ITAE criterion is defined as
![]() (22)
(22)
where the error signal e(t) is the difference between the set-point and the measurement. Overshoot is a measure of how much the response exceeds the ultimate value following a step change in set point. Smaller values of ITAE and overshoot imply better performance.
1) Example 1: FOPTD process
Consider the following FOPTD process [17]:
![]() (23)
(23)
The proposed method was compared with that of WANG and SHAO [17]. For the fair comparison, the maximum sensitivity specification Ms=1.6 was selected. Hence, the adjustable parameter �� of IMC-PID controller could be calculated via Eq.(21).
The system was simulated with a unit step change at t=0 and a step load disturbance with value of 0.2 at t=15. When the model is accurate, the simulation result is shown in Fig.4. The performance indices are listed in Table 2. For the method of WANG and SHAO, although the response was faster than the proposed method, the system had an overshoot and a larger ITAE value. Contrarily, the proposed method almost had no overshoot. Hence, the proposed method not only provided a better set-point tracking, but also had a steadier disturbance rejection response. To investigate the robustness of the system, 20% parameter perturbations were assumed in K, T and L simultaneously towards the model mismatch. The simulation results are shown in Fig.5 and Table 2, and the superior robustness of the proposed method was demonstrated by the smaller values of performance indices.

Fig.4 Step response with nominal model for Example 1
Table 2 Performance indices for Example 1

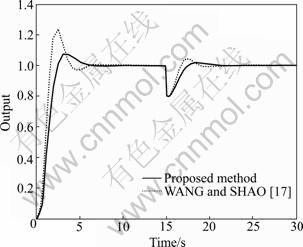
Fig.5 Step response with mismatch model for Example 1
2) Example 2: SOPTD process
Consider the following SOPTD process:
![]() (24)
(24)
The proposed method was compared with two other IMC-PID controllers: SIMC and IMC-Mac. For the recommended SIMC PID settings, a good trade-off between fast response and good robustness could be obtained by choosing the adjustable parameter ��=L [14]. In the IMC-Mac PID tuning rules, the adjustable parameter was chosen as ��=max(0.25L, 0.2��) [18]. The �� value for the proposed method was obtained by selecting Ms=1.3. In the simulation of the SOPTD process, the closed-loop output responses for these three design methods with a unit-step set-point change occurring at t=0, and a step disturbance of magnitude 0.2 occurring at t=60 are shown in Fig.6, and the corresponding performance indices are listed in Table 3. The simulation result showed that the proposed method had a better control performance for both set-point change and load disturbance than the other two methods.
To confirm the robust performance of the proposed method, 20% parameter perturbations were assumed in all four parameters of the model simultaneously. The simulation results for the model mismatch for the three methods are given in Fig.7 and Table 3. The proposed method with the minimum values of ITAE and overshoot clearly showed a better performance than the other two methods.

Fig.6 Step response with nominal model for Example 2
Table 3 Performance indices for Example 2


Fig.7 Step response with mismatch model for Example 2
3) Example 3: IPTD process
Many chemical processes can be modeled as integrator plus time-delay (IPTD) types of systems. The model is given as
![]() (25)
(25)
The IPTD process can be approximated by a first order process plus delay time as
![]() (26)
(26)
where j is an arbitrary constant with a sufficiently large value. Thus, the design of IMC-PID controller is the same as that for the FOPDT. According to the IMC-PID controller tuning rules listed in Table 1, the parameters of the PID are given as
 (27)
(27)
Here, an IPTD process is considered which is previously studied by other researchers [19-20]:
![]() (28)
(28)
The proposed controller is designed by considering the approximation model as
![]() (29)
(29)
Thus, Ms=1.4 is selected, and the parameters of the proposed controller can be obtained. In the simulation, the proposed method was compared with those of LUYBEN, and CHIDAMBARAM and PADMA. The design methods of LUYBEN, and CHIDAMBARAM and PADMA were not based on the �� tuning method. So, their respective values of the controller parameters were used directly. To eliminate the overshoot in the set-point response, a set-point filter was used in the methods of LUYBEN [19] and CHIDAMBARAM and PADMA [20]:
![]() (30)
(30)
where the set-point weighting coefficient �� is bounded by 0�ܦš�1. In Ref.[20], the recommended value of �� was 0.4, while in Ref.[19] ��=0.7 was employed.
Figure 8 shows the closed-loop output response for a unit step change at t=0 in the set-point and a step change with value of 0.2 at t=200 in the load disturbance. On the basis of the comparison of the output response, it was apparent that the settling time was the shortest for the proposed controller in set-point tracking and disturbance rejection than the other methods. To confirm the robustness of the proposed method, it was assumed that there were 10% parameter perturbations in K and L simultaneously. As shown in Fig.9, little difference of the output response was observed between the nominal case and the mismatch case for the proposed method due to the superior robustness.
The comparisons of ITAE value and overshoot values are listed in Table 4. In nominal case, ITAE was minimized for CHIDAMBARAM and PADMA��s method. However, there existed vibration during the response. Furthermore, in the mismatch case, the values of ITAE and overshoot were the largest using CHIDAMBARAM and PADMA��s method, and the performance of closed loop was the worst in all methods. On the basis of the comparison of the output response and the value of the performance indices, it could be concluded that the proposed method showed the best performance.
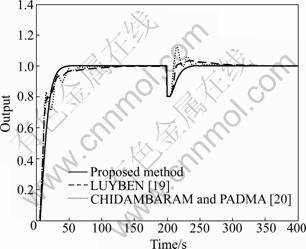
Fig.8 Step response with a nominal model for Example 3

Fig.9 Step response with mismatch model for Example 3
Table 4 Performance indices for Example 3

4) Example 4: FODI process
The first order delay integrating process can be approximated as SOPTD model and it becomes
![]() (31)
(31)
where j is an arbitrary constant with a sufficiently large value. Thus, the IMC-PID controller is the same as that for the SOPTD and the parameters of the PID are given as
 (32)
(32)
Consider the following FODIP process studied by Ref.[21]:
![]() (33)
(33)
Equation (33) could be approximated by the SOPTD mode as
![]() (34)
(34)
The control performance of the proposed method was compared with WANG and CAI��s [21] PID tuning methods. Figure 10 shows the closed-loop out response for these two design methods with a unit-step set-point change occurring at t=0 and a step load disturbance change with value of 0.2 at t=10. For the fair comparison, the maximum sensitivity Ms=1.65, which was equalized with WANG and CAI [21], was selected. The response of WANG and CAI��s method had larger overshoot. The proposed method showed significant advantages both in set-point tracking and disturbance rejection.

Fig.10 Step response with nominal model for Example 4
The robust performance was evaluated by simultaneously inserting a perturbation uncertainty of 50% into all three parameters of the model. The simulation results for the model mismatch are shown in Fig.11, and the superior robustness of the proposed controller was clearly demonstrated.
The corresponding control performance indices are listed in Table 5. It was obvious that the values of ITAE and overshoot using the proposed method were smaller than those of WANG and CAI��s method. Especially, the suppression of the overshoot could indicate that the proposed method had better performance than WANG and CAI��s method.
In the simulation study in the above, the various values of the maximum sensitivity were to ensure a fair comparison. In fact, the value of Ms could be selected in the typical range according to the expected robust performance. The only adjustable parameter �� in the proposed tuning rule will be monotonously increased with the decrease of Ms, and vice versa. So, on the basis of meeting the requirement of dynamic performance, small value of Ms should be selected to enhance the robustness of the system.

Fig.11 Step response with mismatch model for Example 4
Table 5 Performance indices for Example 4

5 Conclusions
1) Based on the Taylor approximation of time-delay term, an IMC-PID controller design and tuning methods are proposed for FOPTD and SOPTD processes.
2) A simple analytical approach of obtaining the adjustable parameter �� based on the maximum sensitivity Ms is deduced, and the robust tuning of IMC-PID controller can be achieved.
3) IPTD and FODI processes can be approximated to a FOPTD and SOPTD model, respectively, so the proposed method can be effectively extended to IPTD and FODI process.
4) The simulation results show that IMC-PID controller tuned by the proposed method can achieve better control performance in both nominal case and model mismatch case than the other existing methods. So, the robustness of the system can be improved by using the proposed method.
References
[1] DUAN Xiao-gang, LI Han-xiong, DENG Hua. Effective tuning method for fuzzy PID with internal model control [J]. Industrial and Engineering Chemistry Research, 2008, 47(21): 8317-8323.
[2] DWYER A O. Handbook of PI and PID controller tuning rules [M]. London: Imperial College Press, 2006: 18-520.
[3] OLIVEIRA V A, COSSI L V, TEIXEIRA M C M, SILVA A M F. Synthesis of PID controllers for a class of time delay systems [J]. Automatica, 2009, 45(7): 1778-1782.
[4] MALWATKAR G M, SONAWANE S H, WAGHMARE L M. Tuning PID controllers for higher-order oscillatory systems with improved performance [J]. ISA Transactions, 2009, 48(3): 347-353.
[5] RONG Hui-gui, ZHENG Hui, LI Zheng-qiang, XIA Yu-xiang. Tuning of fuzzy PID controller for Smith predictor [J]. Journal of Central South University of Technology, 2010, 17(3): 566-571.
[6] UMA S, CHIDAMBARAM M, RAO S A. Set point weighted modified Smith predictor with PID filter controllers for non-minimum-phase (NMP) integrating processes [J]. Chemical Engineering Research and Design, 2010, 88(5): 592-601.
[7] UMA S, CHIDAMBARAM M, RAO S A. Enhanced control of integrating cascade processes with time delays using modified Smith predictor [J]. Chemical Engineering Science, 2010, 65(3): 1065-1075.
[8] OU Lin-lin, GU Dan-ying, ZHANG Wei-dong. Optimal tuning method of PID controller based on gain margin and phase margin [J]. Control Theory and Applications, 2007, 24(5): 837-841. (in Chinese)
[9] CVEJN J. Sub-optimal PID controller settings for FOPDT systems with long dead time [J]. Journal of Process Control, 2009, 19(9): 1486-1495.
[10] SHAMSUZZOHA M, LEE M. An enhanced performance PID filter controller for first order time delay processes [J]. Journal of Chemical Engineering of Japan, 2007, 40(6): 501-510.
[11] SHAMSUZZOHA M, LEE M. Design of advanced PID controller for enhanced disturbance rejection of second-order processes with time delay [J]. American Institute of Chemical Engineers, 2008, 54(6): 1526-1536.
[12] LIU Kang, SHIMIZU T, INAGAKI M, OHKAWA A. New tuning method for IMC controller [J]. Journal of Chemical Engineering of Japan, 1998, 31(3): 320-324.
[13] CHEN Cheng-liang, HUANG Hsiao-ping, HSIEH Chung-tyan. Tuning of PI/PID controllers based on specification on maximum closed loop amplitude ratio [J]. Journal of Chemical Engineering of Japan, 1999, 32(6): 783-788.
[14] SKOGESTAD S. Simple analytic rules for model reduction and PID controller tuning [J]. Process Control, 2003, 13(4): 291-309.
[15] JONES R W, THAM M T. Maximum sensitivity based PID controller tuning: A survey and comparison [C]// SICE-ICASE International Joint Conference. New York: IEEE Computer Society, 2006: 3258-3263.
[16] ALI A, MAJHI S. PI/PID controller design based on IMC and percentage overshoot specification to controller set-point change [J]. ISA Transactions, 2009, 48(1): 10-15.
[17] WANG Ya-gang, SHAO Hui-he. PID auto-tuner based on sensitivity specification [J]. Chemical Engineering Research and Design, 2000, 78(2): 312-316.
[18] PANDA R C, YU Cheng-ching, HUANG Hsiao-ping. PID tuning rules for SOPTD systems: Review and some new result [J]. ISA Transactions, 2004, 43(2): 283-295.
[19] LUYBEN W L. Tuning proportional-integral-derivative controllers for integrator/deadtime processes [J]. Industrial and Engineering Chemistry Research, 1996, 35(10): 3480-3483.
[20] CHIDAMBARAM M., PADMA S R. A simple method of tuning PID controllers for integrator/dead-time processes [J]. Computers and Chemical Engineering, 2003, 27(2): 211-215.
[21] WANG Ya-gang, CAI Wen-Jian. Advanced proportional�Cintegral- derivative tuning for integrating and unstable processes with gain and phase margin specifications [J]. Industrial and Engineering Chemistry Research, 2002, 41(12): 2910-2914.
(Edited by YANG Bing)
Foundation item: Project(2007011049) supported by the Natural Science Foundation of Shanxi Province, China
Received date: 2010-06-29; Accepted date: 2010-11-20
Corresponding author: ZHAO Zhi-cheng, Professor, Tel: +86-351-6998245; E-mail: zhzhich@126.com

