J. Cent. South Univ. Technol. (2007)06-0832-06
DOI: 10.1007/s11771-007-0158-1

High precise control method for a new type of Piezoelectric electro-hydraulic servo valve
ZHOU Miao-lei(周淼磊)1, TIAN Yan-tao(田彦涛)1, GAO Wei(高 巍)1, YANG Zhi-gang(杨志刚)2
(1. College of Communication Engineering, Jilin University, Changchun 130025, China;
2. College of Machinery Science and Engineering, Jilin University, Changchun 130025, China)
Abstract:A new type of piezoelectric electro-hydraulic servo valve system was proposed. And then multilayer piezoelectric actuator based on new piezoelectric ceramic material was used as the electricity-machine converter of the proposed piezoelectric electro-hydraulic servo valve. The proposed piezoelectric electro-hydraulic servo valve has ascendant performance compared with conventional ones. But the system is of high nonlinearity and uncertainty, it cannot achieve favorable control performance by conventional control method. To develop an efficient way to control piezoelectric electro-hydraulic servo valve system, a high-precise fuzzy control method with hysteresis nonlinear model in feedforward loop was proposed. The control method is separated into two parts: a feedforward loop with Preisach hysteresis nonlinear model and a feedback loop with high-precise fuzzy control. Experimental results show that the hysteresis loop and the maximum output hysteresis by the PID control method are 4.22% and 2.11 μm, respectively; the hysteresis loop and the maximum output hysteresis by the proposed control method respectively are 0.74% and 0.37 μm, respectively; the maximum tracking error by the PID control method for sine wave reference signal is about 5.02%, the maximum tracking error by the proposed control method for sine wave reference signal is about 0.85%.
Key words: piezoelectric electro-hydraulic servo valve; hysteresis nonlinearity; Preisach model; fuzzy control
1 Introduction
Electro-hydraulic servo system is widely applied in industrial domain nowadays, for example, robot drive, machine building, architectural engineering. The electro-hydraulic servo valve is the kernel of the electro-hydraulic servo system, and its performance has decisive effect of the whole system. The conventional drive mode of electro-hydraulic servo valve has lower resolution and narrower work band width, which restricts the applications of the electro-hydraulic servo valve. The proposed piezoelectric electro-hydraulic servo valve adopts multilayer piezoelectric actuator as electricity- machine converter. This new type of piezoelectric electro-hydraulic servo valve has better dynamic performance than that of conventional ones.
At present, with the research and the development of new-type actuator based on new type materials, it is possible to make the new electricity-machine converter with high frequency. New materials include piezoelectric ceramic materials, magnetostrictive materials, shape memory alloys. Thereinto, multilayer piezoelectric actuators based on new piezoelectric ceramic materials have many merits such as small cubage, high resolution, high frequency and large drive force. Hence, they are widely used in the micro-position device of machine tools and other precision machines[1-6]. However, they also have many shortcomings, for example, hysteresis nonlinearity. To eliminate the nonlinearity and improve the performance of new type of piezoelectric electro-hydraulic servo valve, a high-precise fuzzy control algorithm with Preisach hysteresis nonlinear model in feedforward loop was proposed.
2 Work principle and characteristic of new type of piezoelectric electro-hydraulic valve
Because the pulling force capacity of multilayer piezoelectric actuator is very poor, it cannot make the slide valve of the electro-hydraulic servo valve bidirectionally move. Two multilayer piezoelectric actuators were adopted to solve this problem[7-8]. The shortcoming of this method is high cost and system is difficult to control. Utilizing the restoring force of a leaf spring, one multilayer piezoelectric actuator can realize bidirectional movement of the slide valve in this paper. When the voltage imposed on multilayer piezoelectricactuator is increased, multilayer piezoelectric actuator will elongate and drive the slide valve to move towards the left, which makes the leaf spring deform. On the contrary, when the voltage imposed on multilayer piezoelectric actuator is reduced, multilayer piezoelectric actuator will be shortened and then drive the slide valve move towards the right by the action of the restoring force of the leaf spring. The structure of new type of piezoelectric electro-hydraulic servo valve is shown in Fig.1.

Fig.1 Structure of new type of piezoelectric electro-hydraulic valve
1-Displacement sensor; 2-Leaf spring; 3-Extension rod; 4-Slide valve; 5-Multilayer piezoelectric actuator
The input-output characteristic of the new type of piezoelectric electro-hydraulic servo valve system indicates that it has hysteresis nonlinearity with nonlocal memory (see Fig.2). At any reachable point L(Ua, ya) in input-output diagram, the number of alternative curve that describes the future path of hysteresis nonlinearity with nonlocal memory is infinite. Namely, the future output of the system depends not only on the current output ya and future input, but also on the past history of input value’s extremum[9]. Hence, the output response of new type of piezoelectric electro-hydraulic servo valve to an applied input voltage becomes unpredictable.
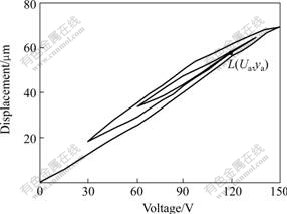
Fig.2 Input-output characteristic of new type of piezoelectricelectro-hydraulic servo valve system
In the system, there exist other nonlinearities such as force of friction and work dead zone of valve, furthermore, damping coefficient and oil temperature are also changed with time. The nonlinearity and uncertainty have seriously effects on the position precision. To improve the performance of the new type of piezoelectric electro-hydraulic servo valve system, a valid control method is needed.
3 Control algorithm
At present, conventional PID controller is widely applied in industrial control domain because of its simple control structure, easy design and inexpensive cost. However, conventional PID controller is difficult to achieve good control performance in the new type of piezoelectric electro-hydraulic servo valve system because the control object has high nonlinearity and uncertainty. Fuzzy controller shows good results in the case of controlling high nonlinear systems[10-13]. However, conventional fuzzy controller is essentially a kind of nonlinear PD controller, there exists steady state error, which cannot meet the demand of high precise of the system. In this paper, a high-precise fuzzy control algorithm with Preisach hysteresis nonlinear model in feedforward loop was proposed. The block diagram of the combined control is shown in Fig.3.
The control system is composed of a feedforward loop based on Preisach model and a feedback loop of high precise fuzzy controller. U1(t) is the output of feedforward loop based on Preisach model. As a linear term, it is selected from a Preisach function table based on the given position value. U2(t) is the output of the high precise fuzzy controller. The sum U(t) of feedforward control voltage U1(t) and feedback control voltage U2(t), as ultimate control voltage, is acted on new type piezoelectric electro-hydraulic servo valve.
3.1 Feedforward loop based on Preisach model
The open loop response of the new type piezoelectric electro-hydraulic servo valve system under an arbitrary and non-cyclic input signal is shown in Fig.2. This phenomenon appears as hysteresis nonlinearity with nonlocal memory, which can be predicted by Preisach model. The numerical form of Preisach model can be written as follows[9, 14]:
![]()
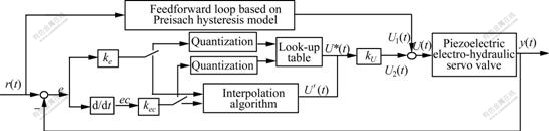
Fig.3 Block diagram of combined control
Eqn. (1) can be used to calculate the response r(t) of the new type of piezoelectric electro-hydraulic servo valve subject to a known arbitrary input voltage sequence. A series of first order functions  of the new type of piezoelectric electro-hydraulic servo valve are experimentally determined. The procedure is as follows.
of the new type of piezoelectric electro-hydraulic servo valve are experimentally determined. The procedure is as follows.
The space between zero and saturation voltage Us is divided into n equipartitions, and the voltage of every equant point is kUs/n, where k=0, 1, 2, …, n.
Voltage is applied from zero to every equant point kUs/n, and then decreased to zero. In this process, the position output values of the new type of piezoelectric electro-hydraulic servo valve are recorded at every equant point between zero and saturation voltage Us, therewith,  and the Preisach function table are obtained (see Fig.4), where Uα′ = kUs/n, Uβ′ = kUs/n (0≤k≤n).
and the Preisach function table are obtained (see Fig.4), where Uα′ = kUs/n, Uβ′ = kUs/n (0≤k≤n).
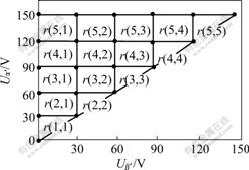
Fig.4 Limit triangle T0 and Preisach function table
Based on the driver voltage range of the new type of piezoelectric electro-hydraulic servo valve, the coordinate space is selected as 0≤Uα′≤150 V and 0≤Uβ′≤150 V. From Fig.4, the limit triangle is divided into several squares and triangles. Decreasing the size of the squares and triangles is expected to increase the accuracy of the model, however, it will spend massive computational time. Based on the experiments, n is selected as 5, namely, the size of each of sides of the squares and triangles is selected as 30 V.
Based on the given position value and the numerical form of the Preisach model,  or
or  can be obtained. Thereby, based on Preisach function table, the control voltage U1(t) is obtained when
can be obtained. Thereby, based on Preisach function table, the control voltage U1(t) is obtained when  lies on the vertical line or
lies on the vertical line or  lies on the horizontal line. For the inexistence voltage in the Preisach function table, it can be obtained by the linear interpolation.
lies on the horizontal line. For the inexistence voltage in the Preisach function table, it can be obtained by the linear interpolation.
In comparison to a conventional feedback controller, the main advantage of this model-based feedforward controller is that it can compensate the hysteresis nonlinearity of the system and achieve highly dynamic operation at the same time, and no additional sensor is needed. This leads to a very simple and inexpensive control system. The main drawback of the feedforward controller is sensitive to unmodel data and unconsidered external disturbances such as temperature drift. For a new type of piezoelectric electro-hydraulic servo valve system that needs high control precision, model-based feedforward controller cannot obtain good control effect. Then a compound control method with feedforward and feedback control project was proposed in this paper. In the feedback control loop, a high-precise fuzzy control algorithm was adopted. The method can obtain good performance.
3.2 High precise fuzzy control
Conventional fuzzy controller has two input variables, e and De, and one output variable (U), they are error, change of error and output control of fuzzy controller. In the new type of piezoelectric electro-hydraulic servo valve system, the physical range of the slide valve position error (e) and change of error (De) are [-x, x] and [-Dx, Dx], respectively. The corresponding discrete universes of discourse of e, De and u are E, EC and U respectively. E, EC and U are designed as normalized form:
{-n, - (n-1), …, 0, …,n-1, n} (i = 1, 2, 3) (2)
The scale factors are ke, kec, and ku, respectively. Then
ke=n1/x, kec=n2/Dx, ku=y/n3 (3)
Based on control rule of conventional fuzzy controller, when |kee|<0.5 and |kecDe|<0.5, the conventional fuzzy controller considers the inputs e and De as zero and the output u is also zero. However, the inputs e and De are not certainly equal to zero. Hence, conventional fuzzy controller has control dead zone. Control dead zone of conventional fuzzy controller is the main reason why the steady state precision of look-up table algorithm is poor. The key to improving the controlling precision of fuzzy control algorithm based on look-up table is to eliminate its control dead zone.
To resolve this problem, an improved fuzzy controller is adopted[15-16]. When E or EC is not equal to 0, the look-up table is adapted to calculating the control output U*; when E and EC are equal to 0, interpolation algorithm is adopted to calculating the control output U′ instead of quantization.
The method of interpolation calculation is shown in Fig.5. The U(i, j), U(i, j +1), U(i +1, j) and U(i + 1, j + 1) are four points in the look-up table that are next to each other. The values of the four base points can be got from look-up table, and the value of U′ can be calculated based on them. Interpolation algorithm is defined as follows:
U′= (1-a)(1-b)U(i, j)+(1-a)bU(i, j+1)+ a(1-b)U(i+1, j)+abU(i+1, j+1) (4)

Fig.5 Schematic diagram interpolation algorithm
Generalized, the control algorithm of the high-precise fuzzy control algorithm with Preisach hysteresis nonlinear model in feedforward loop is described as follows:
 (5)
(5)
4 Experimental research
The position precision of the new type of piezoelectric electro-hydraulic servo valve system is significantly reduced due to the effect of nonlinearity and uncertainty. In this paper, the high-precise fuzzy control method with Preisach hysteresis nonlinear model in feedforward loop was developed to solve this problem. To demonstrate the effectiveness of this proposed control method, a series of experiments were performed on the new type of piezoelectric electro-hydraulic servo valve system under various conditions.
The experimental setup was built, which consisted of industrial control computer, hydraulic pressure experimental bench, pumping station, PESV, arbitrary waveform generator (Model AG1200, Yokogawa Co.) and multi-purpose FFT analyzer (Model CF-5220, Onosokki Co.). The experiments were conducted under a hydraulic pressure of 7 MPa. Hydraulic pressure experimental bench was used to provide the operational environment for the PESV. Pumping station was used to provide the liquid pressure for hydraulic pressure experimental bench. Waveform generator was used to provide the waveform. Fourier analyzer was used to analyze the experimental result. Industrial control computer was used to receive the position feedback signals and provide control voltage based on the proposed control method. The industrial control computer still includes a 12 bit AD/DA card (Model PC-6311, Zhongtai Co.), a power amplifier and program of the proposed control method. Industrial control computer accepts the given signal from waveform generator and position feedback signal through A/D conversion interface, soon afterwards, calculates the control voltage signal based on the proposed the control method and sends it through D/A conversion interface to a power amplifier. In the power amplifier, the control method was amplified with 10 times gains to drive the piezoelectric actuator of the PESV. The position feedback signal was also sent to the Fourier analyser for analyzing the experimental data besides sending to industrial control computer for calculating the control voltage.
Firstly, the experiments were done under open loop control, PID control, and high-precise fuzzy control method with Preisach hysteresis nonlinear model in feedforward loop. The hysteresis loop curves were plotted.
Fig.6(a) shows the hysteresis loop output curve of the system under open loop control. It was calculated that hysteresis loop is about 13.08% and the maximum output hysteresis is about 6.64 μm. Fig.6(b) shows the hysteresis loop output curve of the system under PID control method. It was calculated that the hysteresis loop is about 4.22% and the maximum output hysteresis is about 2.11 μm. This control method can restrain the nonlinear effects of the system. Fig.6(c) shows the hysteresis loop output curve of the system under the high-precise fuzzy control method with Preisach hysteresis nonlinear model in feedforward loop. It was calculated that the hysteresis loop is about 0.74% and the maximum output hysteresis is less than 0.37 μm. This control method can virtually eliminate the nonlinear effects of the system.
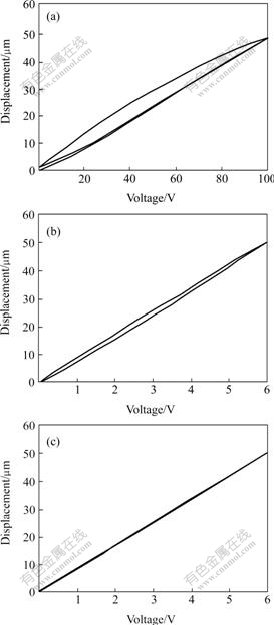
Fig.6 Output responses by different control methods
(a) Output response of open loop control method;
(b) Output response of PID control method;
(c) Output response of proposed control method
The control results show that the proposed control method gives the minimum output hysteresis and the highest precision compared with open loop control and PID control.
Secondly, the comparative experiments of the tracking result for a sine wave reference signal under PID control method and the proposed control method were done. Fig.7(a) shows the tracking result of PID control method for sine wave reference signal. The maximum tracking error is about 5.02%. For the position precise requirement, this tracking result cannot be accepted. The main reason for this result is the hysteresis nonlinearity of the new type of piezoelectric electro-hydraulic servo valve system. Fig.7(b) shows the tracking result of the proposed control method for sine wave reference signal. The maximum tracking error is about 0.85%.
The tracking results show that the proposed control scheme gives faster and more accurate responses compared with those of PID control, and they can satisfy the high precision demand of the new type of piezoelectric electro-hydraulic servo valve system.
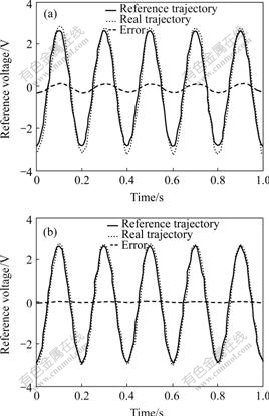
Fig.7 Tracking results of different control methods
(a) Tracking result of PID control method;
(b) Tracking result of proposed control method
5 Conclusions
1) A new type of piezoelectric electro-hydraulic servo valve system is proposed. Multilayer piezoelectric actuator based on new piezoelectric ceramic materials is used as the electricity-machine converter of the proposed piezoelectric electro-hydraulic servo valve.
2) Because of high nonlinearity and uncertainty of the proposed piezoelectric electro-hydraulic servo valve system, the precision requirements for position are influenced seriously. Hence, a high-precise fuzzy control method with Preisach hysteresis nonlinear model in feedforward loop was proposed. The proposed control method can availably eliminate the influence of the nonlinearity and uncertainty, and improve the performance of the new type of piezoelectric electro-hydraulic servo valve system.
References
[1] KIM J D, NAM S R. Development of a micro-depth control system for an ultra-precision lathe using a piezo-electric actuator[J]. International Journal of Machine Tools & Manufacture, 1997, 37(4): 495-509.
[2] KATSUSHI F, MITSUNORI U, NAOTAKE M. Displacement control of piezoelectric element by feedback of induced charge[J]. Nanotechnology, 1998, 9(2): 93-98.
[3] SUN Li-ning, SUN Shao-yun, QU Dong-shen, et al. Micro-drive positioning system based on PZT and its control[J]. Optics and Precision Engineering, 2004, 12(1): 55-59. (in Chinese)
[4] WEI Yan-ding, LU Yong-gui, CHEN Zi-chen. Research on open-loop precision positioning control of a microdisplacement platform based on piezoelectric actuators[J]. Chinese Journal of Mechanical Engineering, 2004, 40(12): 81-85. (in Chinese)
[5] ZHOU Miao-lei, YANG Zhi-gang, GAO Wei, et al. Fuzzy control of a new type of piezoelectric direct drive electro-hydraulic servo valve[C]// Proceedings of the Fourth International Conference on Machine Learning and Cybernetics. Guangzhou: IEEE Computer Soc, 2005: 819-824.
[6] YI You-ping, SEEMAN W, GAUSMAN R, et al. A new hybrid piezoelectric ultrasonic motor with two stator[J]. Journal of Central South University of Technology, 2005, 12(3): 324-328.
[7] YOKOTA S, HIRAMOTO K. Ultra high-speed electro-hydraulic servo valve by making use of a multilayered piezoelectric device (PZT) (compensation of a hysteresis by introducing a software algorithm)[J]. Transactions of Japan Society of Mechanical Engineers Part B, 1991, 57(533): 182-187.
[8] LU Hao, ZHU Cheng-lin, ZENG Si, et al. Study on the new kind of electro-hydraulic high-speed on-off valve driven by pzt components and its high-powerful and speedy technique[J]. Chinese Journal of Mechanical Engineering, 2002, 38(8): 118-121. (in Chinese)
[9] GE P, MUSE J. Modeling hysteresis in piezoceramic actuators[J]. Precision Engineering, 1995, 17(3): 211-221.
[10] LIU Shao-jun, HUANG Zhong-hua, CHEN Yi-zhang. Automobile active suspension system with fuzzy control[J]. Journal of Central South University of Technology, 2004, 11(2): 206-209.
[11] UDDIN M N, RADWAN T S, RAHMAN M A. Fuzzy-logic-controller-based cost-effective four-switch three-phase inverter-fed IPM synchronous motor drive system[J]. IEEE Transactions on Industry Applications, 2006, 42(1): 21-30.
[12] GREEN A, SASIADEK J Z. Heuristic design of a fuzzy controller for a flexible robot[J]. IEEE Transactions on Control Systems Technology, 2006, 14(2): 293-300.
[13] ZOU En, LIU Jun-ping, LI Xiang-fei, et al. A chaos optimization design of fuzzy controller―inverted pendulum system[J]. Journal of Central South University: Science and Technology, 2006, 37(3): 567-571. (in Chinese)
[14] HU H, MRAD R B. On the classical Preisach model for hysteresis in piezoceramic actuators[J]. Mechatronics, 2003, 13(2): 85-94.
[15] ZHANG Zeng-ke. A kind of method to improve controlling precision of fuzzy controller[J]. Journal of Tsinghua University: Science & Technology, 1998, 38(3): 58-61. (in Chinese)
[16] ZHANG Zeng-ke, CHANG Jin. A fuzzy control algorithm with high controlling precision[J]. Fuzzy Sets and Systems, 2003, 140(2): 375-385.
(Edited by YANG Hua)
Foundation item: Project(2001AA423270) supported by the National High-Tech Research and Development Program of China; Project (2005037185) supported by the Postdoctoral Science Foundation of China
Received date: 2007-03-02; Accepted date: 2007-04-18
Corresponding author: GAO Wei, PhD; Tel: +86-13504465144; E-mail: gaow@jlu.edu.cn

