DOI: 10.11817/j.issn.1672-7207.2016.02.021
基于自适应迭代UKF的纯距离目标定位算法
王璐,刘忠
(海军工程大学 电子工程学院,湖北 武汉,430033)
摘要:针对迭代无迹卡尔曼滤波(IUKF)需要人工设定迭代次数的问题,引入遗传算法中适应度函数的概念,提出一种自适应迭代卡尔曼滤波的跟踪算法(AIUKF)。该算法利用观测预测值与实际观测值、系统采样点与实际观测值的适应度函数作为评价标准,根据适应度函数的比值自适应确定是否进行迭代。仿真结果表明:新算法适用于纯距离系统,可以有效解决IUKF人工设定迭代数的问题,且算法性能与IUKF性能相当,均优于UKF性能。
关键词:迭代测量更新;IUKF算法;遗传算法;适应度函数;自适应;纯距离;UKF算法
中图分类号:TN953 文献标志码:A 文章编号:1672-7207(2016)02-0503-05
Range-only target location algorithm based on adaptive IUKF
WANG Lu, LIU Zhong
(College of Electronic Engineering, Naval University of Engineering, Wuhan 430033, China)
Abstract: Since the iterated unscented Kalman filter(IUKF ) has the problem of setting iterative times , according to the fitness function from genetic algorithm, an adaptive iterated unscented Kalman filter(AIUKF) was proposed. The new algorithm calculated the fitness of the predicted values and the observed values, the fitness of the sampling points and the observed values, then adaptive adjust whether iteration or not based on the ratio of fitness functions. The simulation results indicate that the AIUKF has better performance than standard UKF in range-only target motion analysis, and can solve the problem of setting iterative times in IUKF.
Key words: iterated measurement update; iterated unscented Kalman filter (IUKF); genetic algorithm; fitness function; adaptive; range-only; unscented Kalman filter (UKF)
纯距离目标跟踪定位问题又称为纯距离目标运动分析,通过获取观测站与目标的距离信息,并利用这些随时间变化的距离序列来实时估计目标运动参数的技术[1-3]。近年来随着水下无线传感器网络技术的发展,对纯距离目标运动分析问题的研究越来越迫切。由于纯距离问题具有较强的非线性,传统的估计方法如PLE和MGEKF等已不再适用。无迹卡尔曼滤波(UKF)是目前受到广泛关注的非线性估计方法[4-6],其基本思想是基于无味变换(unscented transformation,UT),使用线性最小均方估计的方法进行测量更新,假设状态估计和测量之间呈线性关系,使用二阶矩对状态估计进行测量更新,但在纯距离目标定位与跟踪中,当测量误差较大时,存在易发散的问题。一种易于工程实现的提高非线性近似精度的方式是使用迭代测量更新方式[7-8],使用状态估计值代替预测值来重新进行UT变换,得到滤波参数,并再次利用观测值来改善状态估计,从而提高状态估计的精度,即迭代无迹卡尔曼滤波算法(IUKF)[9-10]。但是IUKF算法需要人工设定迭代数(一般为2~3次)[11],无法根据实际情况自动选择是否迭代,目前尚无文献对此问题进行报道。本文作者引入遗传算法[12-13]中适应度函数的概念,提出一种自适应迭代测量更新方式,将观测预测值、系统采样点与实际观测值的适应度函数作为评价标准,根据适应度函数比值自适应确定是否进行测量更新,从而有效解决IUKF算法人工设定迭代数的问题。
1 纯距离系统描述
假设目标作匀速直线运动,观测站机动,只考虑运动平面的二维情形,坐标系如图1所示。取y轴为北,x轴为东,坐标原点为观测站的初始位置,tk时刻目标的运动状态为 ,观测站运动状态为
,观测站运动状态为 。其中:
。其中: 和
和 分别为目标、观测站位置的X轴分量;
分别为目标、观测站位置的X轴分量; 和
和 分别为目标、观测站位置的Y轴分量;
分别为目标、观测站位置的Y轴分量; 和
和 分别为目标、观测站速度的X轴分量;
分别为目标、观测站速度的X轴分量; 和
和 分别为目标、观测站速度的Y轴分量。则目标与观测站的相对运动状态可表示为
分别为目标、观测站速度的Y轴分量。则目标与观测站的相对运动状态可表示为
 ,
,
记作 。
。
系统状态方程为
 (1)
(1)
其中: ;Ts为采样时间间
;Ts为采样时间间
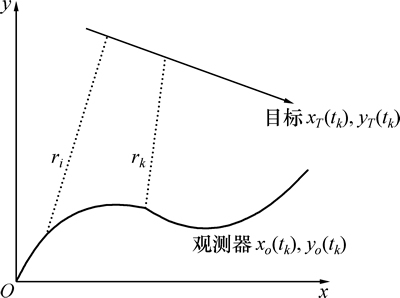
图1 观测站和目标在二维空间几何关系
Fig. 1 Geometrical relation between observer and target in 2D space
隔;系统噪声U(tk)是均值为0、方差为Q(tk)的高斯白噪声。
测量方程为
 (2)
(2)
其中:r(tk)为tk时刻目标与观测站的距离;测量噪声 是均值为0、方差为R(tk)的高斯白噪声。
是均值为0、方差为R(tk)的高斯白噪声。
2 自适应迭代UKF滤波算法(AIUKF)
2.1 IUKF算法
UKF算法的核心是UT变换[14],使用线性最小均方估计方法进行测量更新,该测量更新方法假设状态估计是观测量的线性函数,对于非线性系统来说,这只是一种近似的更新方式。由于纯距离系统具有较强的非线性,使用UKF算法进行状态估计时,容易出现发散的情况。
如果系统根据状态估计重新进行UT变换,可以得到更加准确逼近真实估计的采样点,然后再一次利用观测值改善对状态的估计,可以进一步提高状态估计的精度,即IUKF算法。算法流程如下。
步骤1:初始化。
1) 系统初始化状态估计:

步骤2:选取采样点。
2) 采样点的选取和权值的确定:
其中:α常取0.001,它决定了采样点相对于均值的分布情况;β在高斯分布时最佳取值为2,它表示关于状态变量分布的先验知识; 为矩阵
为矩阵 的均方根的第i列;
的均方根的第i列; 为尺度调节因子,
为尺度调节因子, 通常取0;
通常取0; 为均值权值;
为均值权值; 为协方差的权值。
为协方差的权值。
步骤3:时间更新。
3) 利用系统状态方程变换采样点 。
。
4) 计算预测估计值 。
。
5) 计算预测协方差:
 。
。
步骤4:迭代更新。
6) 根据 ,
, 重新选取采样点,直至迭代数结束,得到新的采样点
重新选取采样点,直至迭代数结束,得到新的采样点 、预测估计值
、预测估计值 和预测协方差
和预测协方差 。
。
步骤5:计算预测测量值。
7) 通过测量方程计算采样点对应的测量值  。
。
8) 计算预测测量值 。
。
步骤6:量测更新。
9) 计算新息方差:
 。
。
10) 计算和 的协方差
的协方差  。
。
11) 计算Kalman增益 。
。
12) 更新误差协方差 
 。
。
13) 更新状态 。
。
2.2 AIUKF算法
IUKF算法需要人工设定迭代次数,不能根据采样点与真实估计值的逼近程度自动选择是否迭代,为了解决这个问题,引入遗传算法中的个体适应度函 数[15]对IUKF算法进行改进。分别计算预测测量值与实际观测值、采样点与实际观测值的适应度函数,根据适应度函数比值确定采样点与目标真实估计的偏差度,从而自适应确定是否进行迭代重新采样。具体步骤如下。
1) 定义适应度函数。
预测测量值与实际观测值的适应度函数fFitness1为
采样点与实际观测值的适应度函数fFitness2为
适应度函数比: 。
。
其中:为预测测量值; 为实际观测值;
为实际观测值; 为采样点;R为观测噪声方差。
为采样点;R为观测噪声方差。
2) 是否迭代判据。
若ρ<1,表示采样点有效逼近真实估计,则不进行迭代测量更新;若ρ≥1,表示采样点与真实估计偏差较大,则根据预测估计值和预测协方差,重新选取采样点,代入IUKF算法流程7)和8)可得新的预测测量值:
 (3)
(3)
其中:Wi为与第i个采样点相对应的权重; 为新的采样点对应的测量值。
为新的采样点对应的测量值。
将式(3)代入IUKF算法流程9),进行量测更新。AIUKF算法一次计算过程如图2所示。
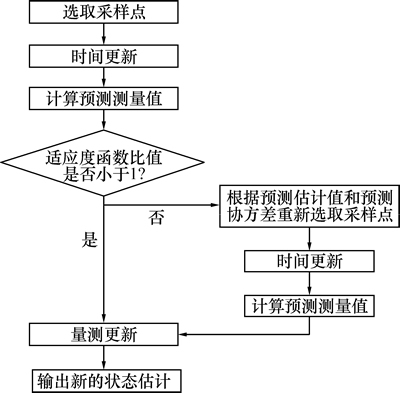
图2 AIUKF计算过程
Fig. 2 Flow chart of AIUKF arithmetic
3 仿真分析
假设目标作匀速直线运动,初始位置为(1 000 m,1 000 m),航向角 ,速度vx=10 m/s,vy=10 m/s。观测站作匀速转弯运动,转弯率ω=0.08,共进行100次仿真,仿真时间间隔为T=10 s,测距误差服从均值为0,均方差为10 m的高斯白噪声,IUKF算法的迭代次数设定为2次。采用均方根误差(δRMSE)来表示目标定位与跟踪的精度,定义
,速度vx=10 m/s,vy=10 m/s。观测站作匀速转弯运动,转弯率ω=0.08,共进行100次仿真,仿真时间间隔为T=10 s,测距误差服从均值为0,均方差为10 m的高斯白噪声,IUKF算法的迭代次数设定为2次。采用均方根误差(δRMSE)来表示目标定位与跟踪的精度,定义 (其中,X为真实值,
(其中,X为真实值, 为估计值),其仿真结果如图3~5和表1所示。
为估计值),其仿真结果如图3~5和表1所示。
表1 算法性能比较
Table 1 Performance comparison under different algorithms

由图3可以看出: UKF的位置状态估计明显偏离真实状态,IUKF和AIUKF都可以有效解决UKF算法易发散的问题。由图4和5可以看出:运用上述3种算法都可以实现目标速度的稳定估计,但是IUKF和AIUKF速度估计更接近于真实值。由表1可以看出:AIUKF性能明显优于UKF性能,且与IUKF性能相当。
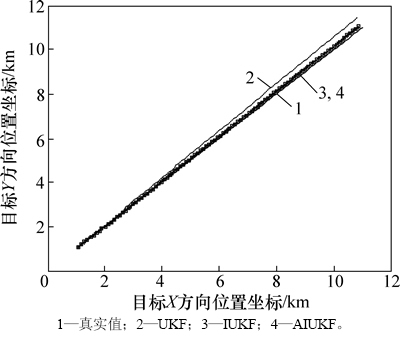
图3 目标运动轨迹估计
Fig. 3 Estimation of target trajectory
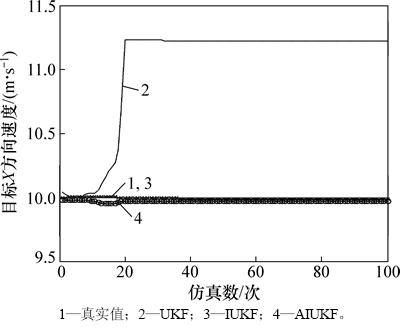
图4 目标X方向速度估计
Fig. 4 Estimation of target velocity in X direction
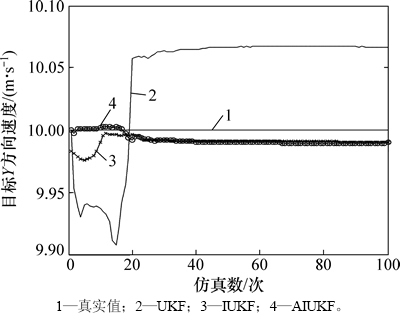
图5 目标Y方向速度估计
Fig. 5 Estimation of target velocity in Y direction
仿真结果表明:AIUKF适用于纯距离目标定位与跟踪,算法性能与IUKF性能相当,均优于UKF性能,同时可以有效地解决IUKF需要人工设定迭代数的问题。
4 结论
1) 将遗传算法中的适应度函数的思想引入IUKF算法,根据适应度函数的比值自适应确定是否进行测量更新,有效解决了人工设定迭代数的问题。
2) AIUKF算法适用于纯距离目标定位与跟踪,且算法性能良好。
参考文献:
[1] TAEK L S. Observability of target tracking with range-only measurement[J]. IEEE Journal of Oceanic Engineering, 1999, 24(3): 383-387.
[2] 孙仲康, 郭福成, 冯道旺. 单站无源定位跟踪技术[M]. 北京: 国防工业出版社, 2008: 21-29.
SUN Zhongkang, GUO Fucheng, FENG Daowang. Passive location and tracking technology by single observer[M]. Beijing: National Defense Industry Press, 2008: 21-29.
[3] BRANKO R, SANJEEV A, JAMES M. Target motion analysis using range-only measurements algorithm performance and application to ISAR data[J]. Signal Processing, 2002, 82(2): 273-296.
[4] 高博, 黄耀光, 李建新. 基于自适应UKF的单站无源定位算法[J]. 信息工程大学学报, 2012, 13(5): 578-582.
GAO Bo, HUANG Yaoguang, LI Jianxin. Single-observer passive location algorithm based on adaptive UKF[J]. Journal of Information Engineering University, 2012, 13(5): 578-582.
[5] ZHEN L, HUA J F. Modified state prediction algorithm based on UKF[J]. Journal of System Engineering and Electronics, 2013, 24(1): 135-140.
[6] 王璐, 李光春, 乔相伟, 等. 基于极大似然准则和最大期望算法的自适应UKF算法[J]. 自动化学报, 2012, 38(7): 1200-1210.
WANG Lu, LI Guangchun, QIAO Xiangwei, et al. An adaptive UKF algorithm based on maximum likelihood principle and expectation maximization algorithm[J]. Acta Automatic Sinica, 2012, 38(7): 1200-1210.
[7] 常国宾, 许江宁. 一种新的混合迭代UKF[J]. 武汉大学学报(信息科学版), 2012, 37(6): 701-703.
CHANG Guobin, XU Jiangning. A new kind of hybrid iterated unscented kalman filter[J]. Geomatics and Information Science of Wuhan University, 2012, 37(6): 701-703.
[8] 刘学, 焦淑红. 自适应迭代平方根UKF的单站无源定位算法[J]. 哈尔滨工程大学学报, 2011, 32(3): 372-377.
LIU Xue, JIAO Shuhong. Adaptive interated SRUKF for single observer passive location[J]. Journal of Harbin Engineering University, 2011, 32(3): 372-377.
[9] FENG Z, JIANG N X, JING S L, et al. IUKF neural network modeling for FOG temperature drift[J]. Journal of System Engineering and Electronics, 2013, 24(5): 838-844.
[10] 谢恺, 金波, 周一宇. 基于迭代测量更新的UKF方法 [J]. 华中科技大学学报(自然科学版), 2007, 35(11): 13-16.
XIE Kai, JIN Bo, ZHOU Yiyu. Iterated unscented Kalman filter[J]. J Huazhong Univ of Sci Tech (Natural Science Edition), 2007, 35(11): 13-16.
[11] 程水英, 毛云祥. 迭代无味卡尔曼滤波器[J]. 数据采集与处理, 2009, 24(7): 43-48.
CHENG Shuiying, MAO Yunxiang. Interated unscented kalman filter[J]. Journal of Data Acquisition & Processing, 2009, 24(7): 43-48.
[12] WANG Hong, LI Haijuan, ZHAO Yue, et al. Genetic algorithm for scheduling reentrant jobs on parallel machines with a remote server[J]. Transactions of Tianjin University, 2013, 19(6): 463-469.
[13] FAN Wenhao, LIU Yuanan, WU Fan. Optimal resource allocation for transmission diversity in multi-radio access networks: a coevolutionary genetic algorithm approach[J]. Science China (Information Sciences), 2014, 57(14): 1-14.
[14] 刘健, 刘忠. UKF算法在纯方位目标运动分析中的应用[J]. 南京理工大学学报(自然科学版), 2008, 32(2): 222-226.
LIU Jian, LIU Zhong. Application of UKF in bearings-only target motion analysis[J]. Journal of Nanjing University of Science and Technology (Natural Science), 2008, 32(2): 222-226.
[15] LIANG Yue, LIU Zhong. Passive target tracking using an improved particle filter algorithm based on genetic algorithm[C]//Lecture Notes in Electronical Engineering (ISNN2010). Shanghai: Springer Verlag, 2010: 559-566.
(编辑 陈爱华)
收稿日期:2015-02-13;修回日期:2015-04-20
基金项目(Foundation item):总装预研基金资助项目(9140A01060113JB11001)(Project (9140A01060113JB11001) supported by GAD advanced Research Found)
通信作者:王璐,博士研究生,讲师,从事目标跟踪与定位、系统建模与仿真研究;E-mail:wanglu_1984@126.com

