多自由度非线性结构参数识别的鲁棒性研究
朱旭东,吕西林
(同济大学 土木工程防灾国家重点实验室,上海,200092)
摘要:由于多自由度非线性结构参数识别是反问题,其解具有不确定性,为提高识别效率及识别结果的精度,基于序列二次规划法并通过数值试验分析研究影响参数识别鲁棒性能的各个因素。研究结果表明:噪声不影响识别效率但影响识别结果精度;基于时域信息构建优化目标函数时,时程长度影响识别效率和识别结果的精度,一般时程长度选取8倍结构基本周期时能取得较好效果;在描述非线性力学行为时,Bouc-Wen模型相比双线性模型适应性更强,具有更好的识别效果;非线性结构在激励强度较大情况下识别得到的参数值更具可靠性;对相关性较弱参数,可通过分步骤识别,减小参数识别数量,从而提高参数识别效率。
关键词:参数识别;鲁棒性;序列二次规划法;优化目标函数;Bouc-Wen模型
中图分类号:TU311.3;O224 文献标志码:A 文章编号:1672-7207(2013)01-0303-06
Robust study on parametric identification of multi-degree-of-freedom nonlinear structure
ZHU Xudong, L Xilin
Xilin
(State Key Laboratory for Disaster Reduction in Civil Engineering, Tongji University, Shanghai 200092, China)
Abstract: As the parametric identification of multi-degree-of-freedom nonlinear structure is an inverse problem, and the solution may be of nonuniqueness. For improving the efficiency and accuracy of the identification result, numerical experiments based on sequential quadratic programming method were conducted to study the various factors affecting the robust performance. The results show that noise does not affect the efficiency of the identification algorithm but the accuracy of the identification results; since the objective function is constructed from the time-domain information, time-length affects the efficiency and accuracy of the algorithm, and generally can achieve good results when it is taken as 8 times of the basic period; compared to the bilinear model, Bouc-Wen model has better ability in describing the nonlinear mechanical behavior; to nonlinear structure, the identified parameter values are more reliable at larger excitation intensity; for reducing the number of parameter identification and enhancing the efficiency of parameter identification, weak correlation parameters can be identified step by step.
Key words: parametric identification; robust performance; sequential quadratic programming; objective function; Bouc-Wen model
系统识别理论经过几十年的发展,人们对其研究越来越深入。系统识别方法依据研究对象的不同而有不同分类[1-3],其中对结构物理参数的识别既可通过频域信息实现,也可通过时域信息实现。在对非线性结构物理参数识别上,与频域法相比较,时域法具有可直接利用结构动力响应的时程信息进行识别的优势。目前大多数时域识别算法研究基于差分方程或者状态空间方程,而在结构分析中最常用的结构模型是有限元模型。这些识别算法不能很好地结合结构的正分析和反分析,同样对复杂结构也不适用,因此,将优化方法和有限元模型相结合是解决系统识别这一问题的一条出路。优化方法有很多,如最小二乘法、序列二次规划法和单纯形法等传统方法以及神经网络和遗传算法等新型的优化方法[1, 4-6]。不少国内外学者采用不同优化方法对非线性结构进行参数识别,如:吕西林等[7]发展了一种识别非线性结构动力参数的迭代方法,参数优化方法主要采用单纯形循环法,并用算例和地震模拟振动台模拟试验数据进行了识别检验;Lu[8]采用带下降段的三折线模型对钢筋混凝土柱子进行了建模,通过振动台试验测量数据,采用自适应步长随机搜索法对恢复力模型参数进行了识别;Koh等[9]基于2种混合遗传算法对一多自由度线性结构进行了识别,并考虑了测量信息不完备情况和噪声影响;Charalampakis等[4]基于位移反应数据,采用混合进化算法对滞回系统进行了参数识别;Monti等[10]研究了不同编码形式和不同识别准则的遗传算法,证实了它在非线性结构识别上的有效性和正确性。由于多自由度非线性结构参数识别是反问题,无论是传统的还是新型的优化算法都不能保证识别结果为真实值,如单纯形法和序列二次规划法等传统型优化算法结果一般与初始值的选取有很大关系,而遗传算法虽然是全局优化算法,但也存在容易出现早熟现象的缺陷,因此,提高算法的鲁棒性是将其应用于对实际结构进行系统识别的关键。而无论是传统型优化算法还是新型优化算法,其算法鲁棒性能都与优化目标函数、恢复力模型、优化参数相关性等因素有关。本研究基于序列二次规划法通过数值试验研究影响参数识别鲁棒性能的各个因素,并提出相应的改进识别鲁棒性能的措施。
1 优化目标函数
优化目标函数构建的质量将直接影响识别算法的鲁棒性能,合理的优化目标函数将以更高的概率收敛到真值。优化目标函数一般为结构响应的仿真值和测量值之间的误差构造而成:
 (1)
(1)
式中:θ为待识别参数;x为结构响应参量;其可以为位移、速度、加速度或者推导向量;下标m和s分别表示计算值和测量值;N为总时程步数;W为加权系数,一般可取时程峰值的倒数。
由于线性和非线性结构优化目标函数构造形式相同,本节优化目标函数构造不涉及待识别参数间关系,为消除恢复力模型等因素影响,也为了使分析简单,这里以线性结构来说明结构响应参量和时程长度对算法鲁棒性能的影响。以3层剪切型结构为数值试验模型,其中质量mj=1 000 kg,刚度kj=1 kN/mm(j=1, 2, 3),如图1所示。结构的一阶和二阶阻尼比均为2%,其前3阶周期分别为0.45,0.16和0.11 s。以El-Centro地震波(NS,1940)为激励荷载,最大峰值加速度(PGA)值为0.1 g,采样间隔为0.02 s,共2 688个时间步。此处假设质量和阻尼比均已知,待识别参数θ仅为刚度,即 ,设定刚度的上、下限分别为真实值的0.5和2.0倍。在限定区间内随机选取60组参数作为初值,定义最终收敛到真实值的比例为收敛概率。
,设定刚度的上、下限分别为真实值的0.5和2.0倍。在限定区间内随机选取60组参数作为初值,定义最终收敛到真实值的比例为收敛概率。

图1 待识别剪切型结构
Fig.1 Lumped mass system for identification
另外,在实际工程或试验中,噪声不可避免,这里在位移、速度和加速度响应时程中加入白噪声来模拟测量噪声。噪声采用零均值均匀白噪声,噪声水平按噪声时程峰值与结构响应时程峰值的比值来决定[11]。
1.1 结构响应参量
关于优化目标函数中结构响应参量选用位移、速度还是加速度或者是它们的组合,目前没有明确的结论。已有研究中,优化目标函数有采用位移的[4],也有的采用加速度的[10],有的采用它们的组合的[7],还有的采用对加速度的Hilbert变换后的幅值[10]。对上述剪切型结构选用不同结构响应参量构建优化目标函数进行辨识,时程步取前300步,其收敛概率如表1所示。
从表1可以看出:选用哪种结构响应参量和噪声水平基本不影响收敛概率。虽然各工况下收敛概率相差不大,但对同一组初始参数值,有的工况收敛到真实值,有的工况则不能收敛到真实值。Monti等[10]指出优化目标函数采用Hilbert变换后的幅值具有更好的收敛性能,这主要由于文献[10]中样本范围较小,对某些初始参数值,采用Hilbert变换后的幅值有更佳收敛性能。
表1 选用不同结构响应参量时的收敛概率
Table 1 Probability of convergence for different quantities %
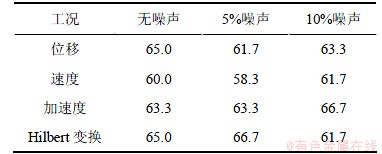
在实际结构中,一般只测量一种结构响应向量。加速度较容易测量,应用中也以加速度响应构建目标函数居多,故本文数值试验也采用加速度响应构建目标函数。
1.2 时程长度
从式(1)可以看出:目标函数值是为结构响应的仿真值和测量值之间的误差的均方和。由于每一时刻的仿真值都依赖于以前一时刻的仿真值,当待识别参数与真实值存在误差时,随着时程长度增加,仿真与测量时程曲线之间相位误差将加大,两者误差也将累积变大。这样,由较优的待识别参数值仿真得到的优化目标函数值不一定小于较差的待识别参数仿真值,从而优化目标函数的多峰性增强,陷入局部最优解的概率增大。可见:时程长度过长将降低算法的收敛概率。仍以上述剪切型结构为数值模型,结构响应参量选用加速度。为研究不同时程长度对收敛概率的影响,这里时程长度分别取0.5,1,2,4,8,16和32倍结构基本周期,由于结构基本周期为0.45 s,即时程长度分别取0.22,0.44,0.9,1.8,3.6,7.2和14.4 s。为消除不同时程区段对算法收敛概率的影响,这里时程总长度均取前14.4 s,对时程长度小于14.4 s的工况,优化目标函数,采取分段仿真计算再求其误差。算法收敛概率随时程长度的变化如图2所示。
从图2可以看出:收敛概率随时程长度增加而降低;当时程长度不大于0.9 s时,即不大于2.0倍基本周期时,收敛概率达到100%。
另一方面,时程长度影响算法的辨识精度。在10%噪声水平下,刚度参数识别值随时程长度的变化如表2所示。从表2可以看出:时程长度为前2 s时,最大识别误差为9.4%,而当时程长度为前32 s时,最大识别误差仅为0.2%。这说明在噪声污染情况下,时程长度的增加有助于识别精度的提高。

图2 收敛概率随时程长度的变化
Fig.2 Probability of convergence under different length of time history
表2 10%噪声水平情况下参数识别值
Table 2 Identified parameter values under 10% level noise
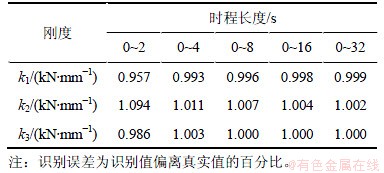
综合考虑收敛概率和识别精度2项参数,优化目标函数构造时,不需要选取一整段时程,一般选取8倍基本周期长度即可。这样既提高了识别的效率,也能达到识别精度。对实际问题进行识别时,可以先采用较短时程长度识别得到一参数值,再以此参数值为初始值选用较长时程长度获得更精确的参数值。
2 恢复力模型
对于线性结构,结构反应与激励强度成正比例关系,因此,激励强度不影响结构的识别鲁棒性能。对非线性结构,结构反应与激励强度不成正比例关系,这里同样通过数值试验来说明激励强度及恢复力模型与识别算法鲁棒性能的关系。
非线性恢复力模型可大致分为光滑型模型和折线形模型[12]。对迟滞非线性系统,常用到的恢复力模型有双线性模型和Bouc-Wen模型。其中双线性模型为折线形模型,物理意义清晰,目前工程中应用此模型较多。Bouc-Wen模型为光滑型模型,其用微分方程描述,对各种光滑的滞回曲线都能较好地近似描述,具有极强的适应性。经典的Bouc-Wen模型存在冗余参数[13],Ikhouane等[14-15]提出将Bouc-Wen模型标准化。标准化后的Bouc-Wen模型为:
 (2)
(2)
 (3)
(3)
式中:R为恢复力;w为内部滞后变量; ,n和σ为控制滞后变量w曲线形状的参数,当n趋向无穷大时,Bouc-Wen模型将等同于双线性模型。标准化后的Bouc-Wen模型参数的物理意义及与双线性模型之间的相互关系见文献[16]。
,n和σ为控制滞后变量w曲线形状的参数,当n趋向无穷大时,Bouc-Wen模型将等同于双线性模型。标准化后的Bouc-Wen模型参数的物理意义及与双线性模型之间的相互关系见文献[16]。
2.1 数值试验一
数值试验一研究激励强度的影响。模型同图1中的线性结构,只是增加该模型结构的非线性信息。此时设定双线性模型参数为:k1j=1 kN/mm,k2j=0.6 kN/mm,δj=10 mm (j=1, 2, 3)。则与之对应的Bouc-Wen模型参数为:kwj=4 kN,kxj=0.6 kN/mm,ρj=0.1/mm,取σj=0.5,nj=2 (j=1, 2, 3)。不同PGA时的延性比如表3所示,此处延性比为广义延性比,定义为顶层位移与三层屈服位移和的比值。
表3 不同PGA时的延性比
Table 3 Ductility ratio under different PGA
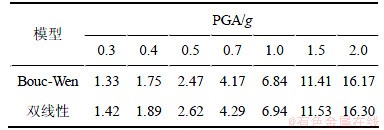
这里同样假定质量和阻尼比均已知,待识别参数为剩余其他参数。参数约束条件为0.5~2.0倍真实值,在约束条件范围内随机取20组参数值作为初始值,时程取前300步。对2个恢复力模型参数进行识别,在不同位移延性比情况下的收敛概率如图3所示。
从图3可以看出:对2个恢复力模型,收敛概率均随延性比的增大而增大;当延性比大于4时,收敛概率均有显著提升。与双线性模型相比,识别算法对Bouc-Wen模型结构都具有更高的收敛概率。这一方面是由于在相同延性比情况下,Bouc-Wen模型相对双线性模型滞回曲线更饱满,包含非线性信息更多;另一方面,Bouc-Wen模型作为光滑型模型,其优化目标函数将随参数变化而平滑改变;而双线性模型存在拐点,优化目标函数将随参数变化而急剧改变,从而容易陷入局部极值点。

图3 不同激励强度下收敛概率
Fig.3 Probability of convergence under different levels of PGA
另外,激励强度的增加也提高了识别参数的精度。表4给出了上述双线性模型各参数在同一初始值、不同激励强度下的识别结果。从表4可以看出:随着激励强度的增加,参数识别的精度越来越高。吕西林等[7]提出最优化方法多解性的概念。对此,可以用激励强度的影响加以解释。对非线性结构,除噪声对识别精度产生一定偏差,很大一部分原因归结于其所承受的激励强度。当激励强度较弱时,优化目标函数所包含的非线性信息较少,非线性参数对优化目标函数
表4 不同激励强度下各参数识别结果
Table 4 Identified parameter values under different levels of PGA

值的影响也较小,从而当非线性参数偏离真实值较大时也有较小的优化目标函数值。这说明,对同一非线性结构,在较大激励强度作用下识别得到的参数值更具可靠性。
2.2 数值试验二
为进一步说明Bouc-Wen模型相比双线性模型在描述非线性力学行为上更具适应性,这里数值试验设置为:(a) 实验Ⅰ,假设2.1节中Bouc-Wen模型结构为实际结构,采用双线性模型对其建模并进行识别;(b) 实验Ⅱ,假设2.1节中双线性模型结构为实际结构,采用Bouc-Wen模型对其建模并进行识别。数值试验中,固定地震波PGA值为0.5g(1g=9.8 m/s2),其他条件同2.1节。由于Bouc-Wen模型参数较多,显然较多参数有更好的适应性。为了便于比较,在数值试验Ⅱ中固定σj=0.5,nj=2 (j=1, 2, 3),则待识别参数数量同数值试验Ⅰ也为9个。各待识别参数约束条件均为真实值的0.5~2.0倍,在约束条件范围内随机取20组参数值作为初始值。
由于目标函数值会随数据点的多少而变化,为方便比较各目标函数值下识别的优劣,将目标函数值的误差水平定义为
 (4)
(4)
式中:e为误差水平;erms(t)为仿真与测量之间的误差均方根值;nrms(t)为均匀噪声的均方根值,对在0和1间的均匀分布白噪声,其均方根值为 。数值试验Ⅰ和Ⅱ中数学模型与实际结构存在差别,这里定义优化目标函数误差水平小于5%即为收敛。计算结果为:数值试验Ⅰ中,收敛概率为50%,最小误差水平为4.96%;数值试验Ⅱ中,收敛概率为100%,最小误差水平为4.67%。这进一步证明了Bouc-Wen模型相比双线性模型在描述非线性行为时有更强的适应性。
。数值试验Ⅰ和Ⅱ中数学模型与实际结构存在差别,这里定义优化目标函数误差水平小于5%即为收敛。计算结果为:数值试验Ⅰ中,收敛概率为50%,最小误差水平为4.96%;数值试验Ⅱ中,收敛概率为100%,最小误差水平为4.67%。这进一步证明了Bouc-Wen模型相比双线性模型在描述非线性行为时有更强的适应性。
3 优化参数相关性
3.1 参数相关性定义
一般来说,在待识别参数数目增多时,优化目标函数的多峰性增强,容易陷入局部最优解。若对识别问题进行分步骤识别,即先给予某些待识别参数估计值,而识别剩余其他参数值,则可以减少优化参数数量,减少目标函数的多峰性,降低识别难度,提高识别效率。而由于预先给予某些待识别参数估计值,其估计值一般相对真实值有一定偏离,识别得到的剩余其他参数值也将偏离真实值。这里将优化过程中因某一参数偏离真实值而引起其他参数识别值偏离真实值的程度定义为参数相关性。
则依据待识别参数中相关性强弱可将参数采取分步骤识别:(1) 先给予相关性较弱参数假定值,对其他参数进行识别;(2) 再以此识别值和相关性较弱参数假定值为初值进行进一步优化。由于步骤(1)中识别值一般已经接近真实值,所以,步骤(2)中以此为初值将很快收敛到真实值。
3.2 分步骤识别可行性
由于优化目标函数基于结构响应的时程信息构建,则对结构周期影响较大的参数为相关性较强参数,反之则为相关性较弱参数。阻尼比、Bouc-Wen模型中参数σ和n均为相关性较弱参数。以1.1节中数值模型为基础,待识别参数中增加阻尼比,其他条件不变为例来说明阻尼比为相关性较弱参数及分步骤识别可行性。
由结构动力学可知[17]:单自由度粘滞系统在谐振荷载激励下的位移反应为

 (5)
(5)
其中:
 (6)
(6)
式中:ω为结构在无阻尼情况下的自振频率;ωD为有阻尼情况下的自振频率; 为激励荷载频率;
为激励荷载频率; 为阻尼比。从式(6)可以看出:在小阻尼比的情况下,阻尼比对有阻尼结构自振频率ωD基本不产生影响。而从式(5)可以看出:位移反应周期由激励频率和自振频率ω控制,阻尼比只是影响周期段内的反应幅值。同样对加速度和速度反应,阻尼比也只是影响周期段内的反应幅值。这意味着即使在错误的阻尼比工况下,真实的刚度也将为最优解或接近最优解。由于真实阻尼比为2%,这里给予不同阻尼比下算法的收敛概率及识别出的刚度,如表5所示。
为阻尼比。从式(6)可以看出:在小阻尼比的情况下,阻尼比对有阻尼结构自振频率ωD基本不产生影响。而从式(5)可以看出:位移反应周期由激励频率和自振频率ω控制,阻尼比只是影响周期段内的反应幅值。同样对加速度和速度反应,阻尼比也只是影响周期段内的反应幅值。这意味着即使在错误的阻尼比工况下,真实的刚度也将为最优解或接近最优解。由于真实阻尼比为2%,这里给予不同阻尼比下算法的收敛概率及识别出的刚度,如表5所示。
表5 不同阻尼比识别结果
Table 5 Identified parameter values under different damp ratio

从表5可以看出:在偏离真实的阻尼比时,结构刚度仍能取得好的识别效果。即使在阻尼比为10%时,识别误差最大也仅为6.57%。另外,对比表1中无噪声工况,在偏离真实阻尼比时,收敛概率不变。
4 结论
(1) 噪声不影响识别效率但影响识别结果精度。
(2) 基于时域信息构建优化目标函数时,时程长度影响识别效率和识别结果的精度,当一般时程长度选取8倍结构基本周期时能取得较好效果。
(3) 光滑型模型相比折线形模型具有更好的识别效果,Bouc-Wen模型相比双线性模型在描述非线性力学行为时适应性更强。
(4) 非线性结构在激励强度较大情况下识别得到的参数值更具可靠性。
(5) 对相关性较弱参数,可通过分步骤识别,以减小参数识别数量,提高参数识别效率。
参考文献:
[1] Ljung L. System Identification: Theory for the user[M]. 2nd ed. New Jersey: Prentice Hall, 1999: 18-167.
[2] Nelles O. Nonlinear system identification: from classical approaches to neural networks and fuzzy models[M]. New York: Springer, 2000: 21-34.
[3] Kerschen G, Worden K, Vakakis A F, et al. Past, present and future of nonlinear system identification in structural dynamics[J]. Mechanical Systems and Signal Processing, 2006, 20(3): 505-592.
[4] Charalampakis A E, Koumousis V K. Identification of Bouc-Wen hysteretic systems by a hybrid evolutionary algorithm[J]. Journal of Sound and Vibration, 2008, 314(3/4/5): 571-585
[5] Loh C, Mao C, Huang J, et al. System identification and damage evaluation of degrading hysteresis of reinforced concrete frames[J]. Earthquake Engineering & Structural Dynamics, 2011, 40(6): 623-640.
[6] Deep K, Thakur M. A new crossover operator for real coded genetic algorithms[J]. Applied Mathematics and Computation, 2007, 188(1): 895-911.
[7] 吕西林, 朱伯龙. 多自由度体系非线性结构模型的系统识别方法[J]. 工程力学, 1985, 2(2): 64-73.
L Xilin, ZHU Bolong. System identification of multi degree of nonlinear structure model [J]. Engineering Mechanics, 1985, 2(2): 64-73.
[8] Lu X. Application of identification methodology to shaking table tests on reinforced concrete columns[J]. Engineering Structures, 1995, 17(7): 505-511.
[9] Koh C, Chen Y, Liaw C. A hybrid computational strategy for identification of structural parameters[J]. Computers & Structures, 2003, 81(2): 107-117.
[10] Monti G, Quaranta G, Marano G C. Genetic- algorithm-based strategies for dynamic identification of nonlinear systems with noise-corrupted response[J]. Journal of Computing in Civil Engineering, 2010, 24(2): 173-187.
[11] 李杰, 陈隽. 未知输入条件下的结构物理参数识别研究[J]. 计算力学学报, 1999, 16(1): 32-40.
LI Jie, CHEN Jun. Study on identification of structural dynamic parameters with unknown input information[J]. Chinese Journal of Computational Mechanics, 1999, 16(1): 32-40.
[12] Sivaselvan M V, Reinhorn A M. Hysteretic models for deteriorating inelastic structures[J]. Journal of Engineering Mechanics, 2000, 126(6): 633-640.
[13] Ma F, Zhang H, Bockstedte A, et al. Parameter analysis of the differential model of hysteresis[J]. Journal of Applied Mechanics, Transactions ASME, 2004, 71(3): 342-349.
[14] Ikhouane F, Manosa V, Rodellar J. Dynamic properties of the hysteretic Bouc-Wen model[J]. Systems and Control Letters, 2007, 56(3): 197-205.
[15] Ismail M, Ikhouane F, Rodellar J. The hysteresis Bouc-Wen model, a survey[J]. Archives of Computational Methods in Engineering, 2009, 16(2): 161-188.
[16] Zhu X, Lu X. Parametric identification of Bouc-Wen model and its application in mild steel damper modeling[C]//12th East Asia-Pacific Conference on Structural Engineering and Construction, EASEC12. Hong Kong: Elsevier Ltd, 2011: 318-324.
[17] Clough R W, Penzien J. Dynamics of structures[M]. 3rd ed. Computers and Structures, Inc, 2003: 36-41.
(编辑 何运斌)
收稿日期:2012-01-04;修回日期:2012-04-03
基金项目:国家自然科学基金资助项目(90815029);国家自然科学基金中日国际合作项目(51021140006)
通信作者:朱旭东(1983-),男,浙江永嘉人,博士研究生,从事工程抗震与防灾研究;电话:13818164374;E-mail: zhuxudong44@163.com

