基于SSI算法的多模态振动信号在线监测仿真
武冬星,叶庆卫,周宇,王晓东
(宁波大学 信息科学与工程学院,浙江 宁波,315211)
摘要:针对多模态振动信号的在线监测指标,提出基于随机子空间(SSI)算法的振动信号在线监测方法。首先采集获得一段振动信号,通过SSI算法得到系统的状态矩阵和输出矩阵,同时提取出振动信号的多模态参数;对于模态参数进行在线监测,发生异常时则进行报警处理;然后利用SSI得到的系统状态矩阵和输出矩阵设计卡拉曼(Kalman)滤波器,对信号进行滤波得到降噪后的信号。对滤波信号进行在线监测,超出幅度阈值则进行报警处理;最后获取下一段振动信号重复进行在线监测。同时针对结构的系统特性(模态参数)和结构的振动幅度进行在线监测,满足实际工程的需求。对这种监测算法进行了理论与仿真分析,获得良好的分析结果。
关键词:卡尔曼滤波;随机子空间;振动信号;在线监测
中图分类号:TN919.5 文献标志码:A 文章编号:1672-7207(2011)S1-0642-05
Simulation of on-line monitoring of
multi-mode vibration signal based on SSI algorithm
WU Dong-xing, YE Qing-wei, ZHOU Yu, WANG Xiao-dong
(Institute of Information Science and Engineering, Ningbo University, Ningbo 315211, China)
Abstract: A new online monitoring algorithm of vibration signal based on the stochastic subspace identification algorithm (SSI) was put forward. At first, a vibration signal was obtained, the state matrix and output matrix are obtained by SSI. The mode parameters of vibration signal were extracted at the same time. The mode parameters extracted by SSI algorithm were monitored, and the alarm processing was started while the mode parameters are in abnormal. Secondly, the system state matrix and the system output matrix were obtained by SSI algorithm. So the Kalman filter was designed by state matrix and output matrix dynamically. The vibration signal was de-noised with the Kalman filter. And another alarm processing was started while the amplitude of de-noised vibration signal is larger than the threshold. Finally, the next one vibration signal was obtained, and the same procession will be repeated by the above two steps. In sum, the mode parameters and the amplitude of vibration signal will be monitored effectively with the monitoring algorithm. The simulation experiments indicate that the monitoring algorithm can monitor the exceptions of vibration signal effectively.
Key words: Kalman filter; stochastic subspace identification; vibration signal; online monitoring
结构健康监测具有重大的社会效益,对社会的安全具有重要的意义[1-2]。目前,结构健康监测获得了越来越多的研究关注,有了很多的研究热点与成果。对于大型结构(如桥梁、大坝、轨道和体育馆等),人们构建了许多复杂有效的在线监测系统[3-7]。在线监测中对结构本身的特性和外在的特性均需进行严密的监测。例如大桥的斜拉索在线监测,一方面需要对斜拉索的索力进行监测,另一方面还需要对斜拉索的振幅进行监测。目前已有的监测算法很少同时对结构内外两个特性进行监测,本文作者利用SSI算法进行了这方面的尝试。
近年来,随机子空间算法(SSI)在大型桥梁工程结构的健康监测问题中越来越受到人们的关注[8]。SSI算法是以系统的离散时间状态模型为基础,该方法识别阻尼比虽然存在一定的局限性,但对于大型工程而言,阻尼比一般都很小,从绝对值角度来看,可以认为该方法识别的阻尼比具有可信度。本文作者对多模态振动信号逐段进行SSI算法提取模态参数,并设计Kalman滤波器进行滤波来监测信号的真实振幅变化情况,因此,可以适应大型结构的振动特性与健康状态变化,为结构健康监测提供可靠的依据。
1 SSI算法原理
随机子空间识别是目前较先进的结构环境激励条件下模态参数识别时域方法之一。其数学模型是状态空间方程,利用相关函数求解结构状态空间方程的系统矩阵和输出矩阵得到结构的模态参数。随机子空间算法以线性离散的状态空间方程为基础[9-10]
 (1)
(1)
其中:A为系统状态矩阵,C为系统输出矩阵。x(k)是状态向量,y(k)为测得的系统输出。w(k)和v(k)分别为过程噪声和观测噪声。根据状态向量和输出向量,可以定义下列相关序列:
 (2)
(2)
利用各通道响应信号的互相关函数Hankel矩阵H,如式(3),再通过对H的SVD分解得到系统矩阵A和输出矩阵C,最后由A和C得到系统的特征频率、阻尼比和振型。
 (3)
(3)
其中:p和q分别表示该系统中输入和输出的个数。
SSI算法以Kalman滤波为基础,可以提取得到系统方程和模态参数,对模态参数进行识别观测,然后可以根据系统方程设计kalman滤波器,得到滤波后的信号,为进一步监测预警提供保障。
设系统方程和量测方程分别如下:
其中:w(k)为过程噪声,其噪声协方差设为Q;v(k)为量测噪声,其噪声协方差设为R;f(k+1, k)是状态转移矩阵;H(k+1)为观测矩阵。
卡尔曼滤波的基本方程如下[11-13]:
 (5)
(5)
其中:K(k)为滤波增益矩阵;P(k|k-1)为预测误差协方差矩阵;P(k-1|k-1)为滤波误差协方差矩阵。利用卡尔曼滤波,可以降低由于环境噪声和机械振动干扰等噪声污染。
2 多模态振动信号在线监测算法原理
本文作者将模态参数提取算法与Kalman滤波算法相结合,主要用于在线监测预警处理系统中。根据实际监测工程的需求,一般预警判决有2个指标,分别为振动多模态参数(包括主频和阻尼比)和振幅突变。根据这2个判决指标,设计了基于SSI算法的多模态振动信号在线监测。
令 ,即代表观测信号的一段(从第i时刻到第j时刻),称为信号的第i段,其长度为
,即代表观测信号的一段(从第i时刻到第j时刻),称为信号的第i段,其长度为  。
。
首先对第k段信号 进行SSI算法获取这段信号所对应的系统方程和模态参数:
进行SSI算法获取这段信号所对应的系统方程和模态参数:
 (6)
(6)
其中:A(k)和C(k)分别为第k段信号对应的系统状态矩阵和系统输出矩阵,M(k)为第k段振动信号的多模态参数 ,包含m个模态。
,包含m个模态。
有了M(k)就可以进行模态参数判决,发生异常则报警。
接着根据A(k)和C(k)设计Kalman滤波器,并对当前第k+n个信号yk+n进行滤波,去除噪声获得滤波后的信号 。
。
 (7)
(7)
其中:w与v为系统和观测噪声。通过Kalman滤波获得当前精确的信号 。对滤波信号差分处理与设定的振幅阈值Y0进行对比,若
。对滤波信号差分处理与设定的振幅阈值Y0进行对比,若 则进行预警,认为发生了信号振幅超标。
则进行预警,认为发生了信号振幅超标。
根据算法思路,监测信号分别为振动信号模态参数突变和信号振幅突变,算法的流程图如图1所示。
3 算法仿真分析
根据上述的监测算法进行了多种仿真试验。在正常的多模态信号中分别掺杂了突变信号、其他模态信号等,来验证当振动系统结构发生故障时本算法是否能够有效检测出变化而作出预警。
设正常多模态仿真信号为
 (8)
(8)
式(8)包含两个模态,其主频分别为16 Hz和20 Hz,衰减系数分别为1.2和1.5。
设异常多模态信号如下:
 (9)
(9)
其中:异常信号从t0时刻开始到tr时刻结束,其他时间为0,其模态主频为35 Hz。
设突变信号如下:
 (10)
(10)
其中:突变信号仅仅在第d1时刻和第d2时刻取较大的信号,其他时刻均为0。
这样最终的仿真信号为三者的叠加:
 (11)
(11)
其中:v(t)为零均值的白噪声。
针对仿真信号,设定所需要的模态参数变化异常监测阈值和振幅监测异常阈值分别如下:
第1阶主频w1允许的正常预警范围为19.85~20.15;第2阶主频w2允许的正常预警范围为15.5~16.5;振幅监测异常时,设差分后信号幅度阈值在噪声方差Q=0.1时为0.4.
针对仿真信号y(t)进行仿真测试,仿真信号参数t=linspace(0, 10, fs),fs=10 000,t0=t(400),tr=t(1 000), d1=t(1 501),d2=t(1 700)。本仿真实验从第1个采样点开始,以步长N=1 024间隔进行模态参数提取,循环迭代1 000次后,再对信号y(1 000 : 2 023)进行Kalman滤波。图 2所示为噪声方差Q=0.1,A=B=2 时原仿真信号y(t)的前3 000个信号点的仿真结果。实验中从t=0时刻开始进行仿真监测。图3和图4所示分别为在噪声方差Q=0.1时模态参数和滤波信号的监测结果。
仿真实验表明,本文算法能够监测出主频突变和幅值突变等信号异常。仿真异常多模态信号为y(400: 1 000),即第400个采样点到1 000采样点之间。监测到模态参数发生突变是在SSI算法执行100次至670次之间,也即信号y(100 : 1 123)之后至信号y(670: 1 693)之间。仿真结果表明,振动信号故障消失时恢复正常时,模态主频能够立即恢复正常状态。突变信号发生在第 1 501 和第 1 700 个采样点处,可见本算法能够准确监测出信号幅值突变点的时刻。随着噪声方差的增大,滤波后的信号幅值之差在增大,所以在实际监测过程中要合理的设置监测阈值,以降低误判概率。
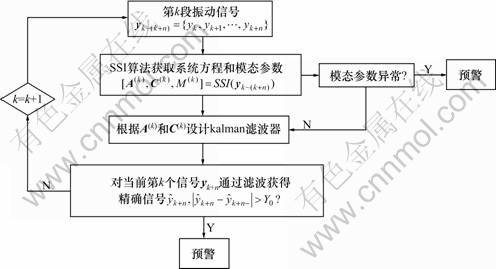
图1 算法流程
Fig.1 Algorithm process

图2 噪声方差Q=0.1时前3 000个信号点的仿真信号
Fig.2 Simulation signal in former 3 000 signal points at noise variance (Q) of 0.1

图3 噪声方差Q=0.1时滤波信号监测结果
Fig.3 Monitoring results of filtering signal at noise variance (Q) of 0.1

图4 噪声方差Q=0.1时模态参数的监测结果
Fig.4 Monitoring results of modal parameters at noise variance (Q) of 0.1
4 结论
(1) 通过随机子空间算法对振动信号处理,获取系统方程同时获振动信号取模态参数。传统的Kalman 滤波方法用于桥梁工程施工和监测是利用 Kalman 滤波预测振动信号的模态参数,根据模态参数的变化作出故障判决依据。
(2) 与传统方法相比,算法有2个参数作为故障诊断的依据,分别为振动信号模态主频和信号突变。仿真分析表明算法能够快速有效地进行故障检测,因此,可以应用于桥梁工程施工和监测等领域,通过两次损伤判决,判断工程结构是否处于健康范围,为进一步监测和预警提供检测依据。
参考文献:
[1] 王真之, 王晓东, 周宇, 等. 一种新型的桥梁结构健康远程监控系统[J]. 计算机应用研究, 2008(2): 637-640.
WANG Zhen-zhi, WANG Xiao-dong, ZHOU Yu, et al. Novel system for bridge structure health remote monitoring[J]. Application Research of Computers, 2008(2): 637-640.
[2] Messina A, Williams E J, Contrusi T. Structural damage detection by a sensitivity and statistical-based method[J]. Journal of Sound and Vibration, 1998, 216(5): 791-808.
[3] 占晴, 周宇, 叶庆卫, 等. 基于ERA算法的大桥斜拉索索力检测方法[J]. 电子测量与仪器学报, 2010, 24(8): 743-747.
ZHAN Qing, ZHOU Yu, YE Qing-wei, et al. Detection of bridge cable force based on ERA[J]. Journal of Electronic Measurement and Instrument, 2010, 24(8): 743-747.
[4] 张启伟, 周艳. 桥梁健康监测技术的适用性[J]. 中国公路学报, 2006, 19(6): 54-58.
ZHANG Qi-wei, ZHOU Yan. Applicability of bridge health monitoring technology[J]. China Journal of Highway and Transport, 2006, 19(6): 54-58.
[5] 张启伟. 大型桥梁健康监测概念与监测系统设计[J].同济大学学报, 2001, 29(1): 65-69.
ZHANG Qi-wei. Conception of long-span bridge health monitoring and monitoring system design[J]. Journal of TongJi University, 2001, 29(1): 65-69.
[6] 叶庆卫, 赵挺凯, 周宇, 等. 基于模态小波连续变换的密频模态参数识别[C]//2010中国模式识别会议. 重庆: 2010: 602-605.
YEI Qing-wei, ZHAO Ting-kai, ZHOU Yu, et al. Concentrated modal parameter identification Based on modal wavelet continuous transform[C]//CCPR2010. Chongqing: 2010: 602- 605.
[7] 陈博, 俞立, 张文安. 具有测量数据丢失的离散不确定时滞系统鲁棒Kalman滤波[J].自动化学报, 2010, 37(1): 123-128.
CHEN Bo, YU Li, ZHANG Wen-an. Robust Kalman Filtering for uncertain discrete time-delay systems with missing measurement[J]. Acta Automatic Sinica, 2010, 37(1): 123-128.
[8] 樊可清, 倪一清, 高赞明. 改进随机子空间系统辨识方法及其在桥梁状态监测中的应用[J]. 中国公路学报, 2004, 17(4): 70-73.
FAN Ke-qing, Ni Yi-qing, GAO Zan-ming. Improved stochastic system identification approach with is application in bridge condition monitoring[J]. China Journal of Highway and Transport, 2004, 17(4): 70-73.
[9] 刘东霞, 何敏, 焦建伟. 基于随机子空间的桥梁损伤识别[J]. 工程结构, 2008, 8(4): 105-106.
LIU Dong-xia, HE Min, JIAO Jian-wei. Bridge damage identification based on the stochastic system identification[J]. Engineering Structure, 2008, 8(4): 105-106.
[10] 彭细荣, 路新瀛, 陈肇元. 结构应变模态识别的随机子空间方法[J]. 振动与冲击, 2008, 27(6): 4-6.
PENG Xi-rong, LU Xin-ying, CHEN Zhao-yuan. Stochastic subspace method for structural strain modal parameter identification[J]. Journal of Vibration and Shock, 2008, 27(6): 4-6.
[11] 冯道旺, 于红旗, 周一宇, 等. 一种基于平方根卡尔曼的二阶滤波算法的研究[J]. 信号处理, 2008, 24(2): 268-271.
FENG Dao-wang, YU Hong-qi, ZHOU Yi-yu, et al. A second-order filter based on square-root Kalman algorithm[J]. Signal Processing, 2008, 24(2): 268-271.
[12] 任宜春, 易违建. 结构物理参数识别的多尺度参数卡尔曼滤波方法[J]. 工程力学, 2008, 25(5): 1-5.
REN Yi-chun, YI Wei-jian. Identification of physical parameters by multi-scale parameter Kalman filter[J]. Engineering Mechanics, 2008, 25(5): 1-5.
[13] 戴海峰, 孙泽昌, 魏学哲. 利用双卡尔曼滤波算法估计电动汽车用锂离子动力电池的内部状态[J]. 机械工程学报, 2009, 45(6): 95-100.
DAI Hai-feng, SUN Ze-chang, WEI Xue-zhe. Estimation of internal states of power lithiun-ion batteries used on electric vehicles by dual extended Kalman filter[J]. Journal of Mechanical Engineering, 2009, 45(6): 95-100.
(编辑 龙怀中)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61071198);浙江省教育厅基金资助项目(Y200908502)
通信作者:武冬星(1987-),女,河北承德人,硕士,从事振动信号分析研究;电话:15258254087;E-mail: wudongxing1987@163.com

