�綯���õ���ֱ��ϡ��������ˢ���ϵͳ
������1, 2���눐��1������3���2
(1. ���ϴ�ѧ ��������Ϣ����ѧԺ������ ��ɳ��410082��
2. ���ϻ���ְҵ����ѧԺ������ ��ɳ��410151��
3. ��̶����ɷ�����˾������ ��̶��411101)
ժҪ����Ե綯�����ŷ����������Ƽ����о���״�����һ�ֵ���ֱ��ʽϡ��������ˢ���ϵͳ����ϵͳѡ����ת������ͬ���綯��(PMSM)��ת�Ӵ�·���ñ������ʽ�ṹ�����ȣ�������ת��PMSM�Ľṹ���������Ե����ŷ��������о������1̨3 kW��6���ij�����ת��PMSM��������������������ԣ���Σ��о�PMSM����λ�ô�����ʸ�����ƣ��������Ƶĵ������������MATLAB/Simulink�������ŷ�ϵͳ���з���������о������������ת��PMSM����Ч�ʸߡ�ת���ܶȴ��ʺϵ������е��ص㣬��ֱ�������綯���������á��ų�����Ԫ��������ϡ���Ч��·���㡱�ķ�������������ߵ����Ʒ�����ȷ�ȣ��Ըõ��ϵͳʵʩ��������ʸ�����Ʋ��ԣ�ȡ���˽Ϻõ�Ч�������û�ģ�۲����ܹ���ȷ�ع�����ת�ٺ���ת��λ�ã����Ը��ر仯������Ŷ����н�ǿ��³���ԡ�
�ؼ��ʣ�����ֱ������ת�ӣ�ϡ��������ˢ�����ʸ������
��ͼ����ţ�TM315 ���ױ�־�룺A ���±�ţ�1672-7207(2013)05-1842-07
Motor system of low-speed direct-drive rare-earth permanent magnet brushless for electric vehicles
LIU Jianlin1, 2, FENG Yaojing1, ZENG Yi3, YANG Hai2
(1. College of Electrical and Information Engineering, Hunan University, Changsha 410082, China;
2. Hunan Mechanical & Electrical Polytechnic, Changsha 410151, China;
3. Xiangtan Electrical Machine Co. Ltd., Xiangtan 411101, China)
Abstract: Based on the research status of servo motor and its control technology for electric vehicles, a low-speed direct-drive rare-earth permanent magnet brushless motor system was proposed, which used an outer-rotor permanent magnet synchronous motor (PMSM) with a surface plug-in magnetic structure. Firstly, the main structural features were analyzed and electromagnetic design research was carried out. A 3 kW 6-pole prototype was fabricated and tested when the outer-rotor PMSM for electric vehicles was designed. Then, the sensorless vector control of PMSM was studied, and simulation of the servo system was implemented by using MATLAB/Simulink software based on the designed parameters. The results show that the outer-rotor PMSM has the advantages of high efficiency, high torque density and low speed, which makes it suitable for direct driving in electric vehicles. The design method that combines magnetic field finite element analysis with equivalent magnet circuit calculation can improve the accuracy of the motor design and analysis. The sensorless control strategy used for the PMSM was achieved good effects as the sliding mode observer can accurately estimate the motor speed and track the rotor position. The system has good robustness to the disruption caused by load variation.
Key words: low-speed direct-drive; outer rotor; rare-earth permanent magnet brushless motor; vector control
�綯����һ����ࡢ���ܵ���ɫ��ͨ���ߣ��ܹ����������ŷš�������ʻ����������Ⱦ���ȷ���͡�����С�����������ͣ��ܵ���������Ĺ�ע[1-11]���綯��������ϵͳ�ǵ綯���ĺ��IJ���֮һ����Ҫ��Ϊֱ���綯�����첽�綯����ͬ���綯��3�����ϵͳ[1-3]�����ݳ�����ʻ�ص㣬ѡ�õ��Ҫ�������ת�ش��ٷ�Χ����Ч�ʸߺ����ܶȴ���ص㡣��������ϡ��������ˢ����������С�����ܺá��ɿ��Ըߡ����ת�ش���ŵ㣬�ڵ綯������ϵͳ�еõ���Խ��Խ�㷺��Ӧ�ã�Ҳ��Ϊ�綯������ķ�չ����[3]���������װλ�õIJ�ͬ����Ϊ����ʽ���������ʽ����[2]������ʽ�������õ綯�������ͳ�ķ�����������ϵͳ��������еʽ���ݻ���װ�á���������������������ᡢ��е�������ͳ��֡����ʽ������ֱ�ӽ��綯����װ�����������ϣ���ˣ����߽ṹ���ա�����Ч�ʸߡ���Ӧ�죬���������ֶ����ɿء��������ܸߵ��ŵ㡣���ʽ�����ַ�Ϊ����������ֱ�������������������ȣ�ֱ������ʡȥ�˼��ٻ�������С�˳�������ߴ磬�ṹ�����ա�Ч�ʸ��ߣ�ʹ����������������ʻ�Ͳ�����ƽ���Ժ�[3-7]����ֱ�������Ե��������Ҫ��Ҳ���ߣ���������ת�ء�����Ĺ������������ĵ��ٷ�Χ��[3]��Ϊ�ˣ������������һ������ͬ���ŷ����ϵͳ��������ת������ͬ����������е��١���ת�ص��ŵ㣬����ֱ��ʽ���������Ҫ���ŷ�ϵͳ����ʸ�����ƣ��������õĵ�������[4-5, 12]��
1 ��ת��PMSM���
1.1 ����Ļ����ṹ����
��ת������ͬ���綯������Ҫ�������ڶ��Ӻ���ת�ӡ�ͼ1��ʾΪ�������ṹ��3/4����ͼ��
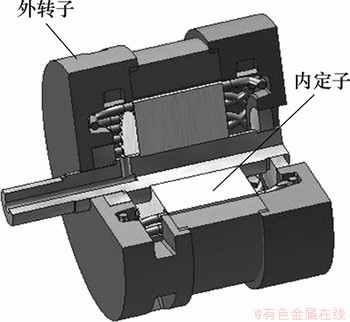
ͼ1 �������ṹ
Fig.1 Structure of motor
�ڶ����ɶ������ġ����������Ȳ�����ɡ����������ɳ�۵Ĺ��Ƭ��ѹ���ɡ����Ӳ���Ƕ�����飬���������������ͼ��������������ۺϿ��ǵ�ź���Ҫ��ѡ�ú��ʵIJ��Ρ�����������Ƶ�6�����Ϊ36�۾�����ѡ��ƽ�ײ۽ṹ������ͬ������Ķ���������ʵ������ת������Ҫ����֮һ�����Ӧ������������ơ��ڱ������У����õ��������������ӵĵ�����ʽ���顣
���������ת�ӵ������Ҫ��е֧�Ų�����Ҫ����нϸߵĻ�еǿ�Ⱥնȣ��ỹҪΪ������������ṩ�����������ڱ������У������������ͼ2��ʾ�������һ�����һ����ȵ�ä�ף�������������˲�������濪��һ����ף���ä����ͨ�����������ɴ���ä��������
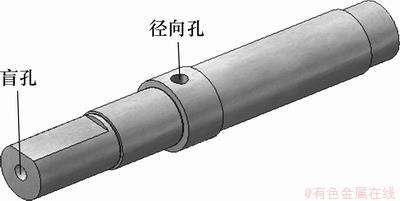
ͼ2 �����ʾ��ͼ
Fig.2 Diagram of structure of rotor
��ת���ǵ���в����ų��IJ������ڱ���������Ҫ����ת�����ġ�������Ͷ˸ǡ�
�綯���õ綯��ͨ��Ϊ��Ƶ�������У����������顣���ڵ綯��ת�ٽϵͣ���ת�ӻ�еǿ�ȵ�Ҫ���Ǻܸߣ��ɲ������칤����Լı���ʽת�Ӵ�·�ṹ������ת����תʱ��������ʩ������������ʹ�䲻�������롣���õ綯�����������й������ص㣬�����ػ����ྫ���ŷ�ϵͳ��ȣ����ƾ���Ҫ�����ر�ߣ���ˣ�����ת�صIJ���Ӱ���С���෴�����ɳ�����ô���ת������ߵ綯���ġ����š������������Ա�֤�Ͽ��ĺ㹦�����е��ٷ�Χ�����õĶ�̬���ܡ����ԣ������в��ñ������ʽת�ӽṹ����ͼ3��ʾ���ڵ�������ϱ������ԡ�ת�ӳݽ���ΪШ�Σ��ɸ����̶������塣������ѡ�þ��нϴ����������ǿ��ȥ�����ܺߴ��ܻ���ϡ�����ϣ��������в��õ��Ǿ�����������ܵ��ս���������ϡ�
�˸����ݶ��̶��ڶ��������ϣ���Ҫ������˲���������á��˸�������ͨ��������ӣ�ʹ��������ת������֮��ֻ����Բ�ܷ��������˶���
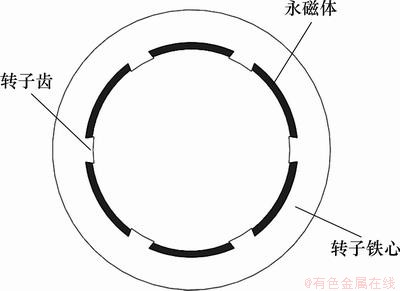
ͼ3 ת�ӽṹ
Fig.3 Structure of rotor
1.2 ��ת��PMSM������������Ԫ����
��ת������ͬ�������ŷ���������˼·����ת��ʽ��������˼·������ͬ��
�������Ҫ�ߴ�Di12Lef�ɸ���Ҫ��ĵ��ת�غ�ѡ���ĵ�Ÿ�������ʽ�ó���
 (1)
(1)
ʽ�У�TeNΪ�綯���ת��(N��m)��B��1Ϊ��϶���ܻ�����ֵ(T)��AΪ���ӵ縺����Чֵ(A/m)��Di1Ϊ��ת�ӵ�������⾶(mm)��LefΪ��ת�ӵ�����ij�(mm)��
���Ӽ����1�ı���ʽΪ
 (2)
(2)
ʽ�У�pΪ������������ͬ�������ƾ���ѡȡһ������Ҫ�ߴ��Lef /��1������ʽ(1)��ʽ(2)�ɵõ��綯������Ҫ�ߴ硣
��ʽ(1)���Կ�����Di12Lef�ںܴ�̶���ȡ������϶���ܻ�����ֵB��1�붨�ӵ縺����ЧֵA�����е縺������������ƾ�����ѡȡ�����Ÿ�����Ҫ��������ߴ��ת�Ӵ�·�ṹ������
ת��������ߴ�(����bM�����hM������LM)��������϶���ܲ��Σ���Ӱ��綯�������������⣬��Ӱ��綯����������Ŀ���©��ϵ����0���Ӷ�������������������ʡ������������LMͨ�������ij���Lef��ͬ����LM=Lef������ʽ��·�ṹ����������Ⱥͺ�ȵijߴ������ʽȷ����
 (3)
(3)
ʽ�У���rΪ���Ų��ϵ���Իظ��ŵ���(H/m)��BrΪ���Ų��ϵļ���ʣ���ܶ�(T)��B��Ϊ������϶��ͨ�ܶ�(���Ϊ�����϶��ͨ�ܶȵ���Чֵ)(T)����efΪ��϶��Ч����(mm)����pΪ���Ŵż��ļ���ϵ����
����Ԥ�ȹ��ƺͽ��Ƽ����Ӱ�죬����������ʽ����ijߴ��������ڽϴ������磺Ϊ���㣬���ʱһ����Ϊ���㼫��ϵ����i�����Ŵż��ļ���ϵ����p������ȡ����ڱ���ʽת�Ӵ�·�ṹ����pΪ���������bM�뼫���1֮�ȣ�����
 (4)
(4)
��ʵ���ϣ����㼫��ϵ���뼫��ϵ���Ľ�����Ƚ����������������Ϊijһ�ض�ֵʱ��������������ȵı仯�����㼫��ϵ���ı仯Ҳ�ܴ���ˣ����ܼص�ͬ�ڼ���ϵ����������
Ϊ�������е���һ���⣬�ɲ�������Ԫ���Ե���ų����з�������ȡ�Ͼ��������ٽ�ϵ�Ч��·��������Ż�����������Ԫ����ʱ��һ�����ʸ����λ�������ų�ǿ�ȡ�ͨ��������ڲ��ų�������Ϊ��άƽ�泡�ķ������⣬�������ڴų���������ȷֲ������Ƭ���ϸ���ͬ�ԣ��Ҵų������ڵ綯���ڲ����Ա����о���6������ʽת�Ӵ�·����ת�����ŵ��Ϊ����ͼ4��ʾΪ��������¶��Ӻ�ת�Ӵ���ͼʾ�����λ��ʱ����ڵĴ����߷ֲ������1�Լ��µĿ�����϶���ܲ�����ͼ5��ʾ���������xΪ��Բ�ܷ����ϵľ��롣
��1�������1����϶���ܵķֲ������������ȷֲ�����϶���ܾ��������ЧΪ���ȷֲ��ľ��β����߶�Ϊ����ͨ�ܶ�B��������Ϊ���㼫��ϵ����i����1�����࣬����i��1������
 (5)
(5)
�õ����㼫��ϵ����
 (6)
(6)

ͼ4 �����߷ֲ�
Fig.4 Distribution of magnetic flux lines
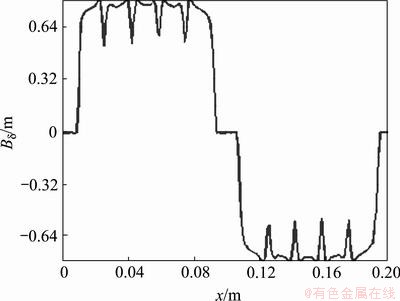
ͼ5 ������϶���ܲ���
Fig.5 Waveform of air gap flux density at no load
���У�B��avΪ1����������϶���ܾ��������ƽ��ֵ����Ȼ��ʽ(6)��ʽ(4)�����������ڵ�����ʱ���Բ���ʽ(4)���г������㣬������ʽ(6)�Ե�����ܽ��н�һ��������
2 ��ת��PMSM���������
��1̨�����Ϊ3 kW���ת��Ϊ400 r/min��6��������ת������ͬ���綯��Ϊ������Ƶõ��Ļ����ṹ����ҪԤȡ�ߴ����1��ʾ��
��1 �綯����Ҫ�ṹ�ߴ�
Table 1 Main structural parameters of motor

��ת��PMSM�������������ƽ̨��ͼ6��ʾ�������ԣ����������������ָ��Ҫ��
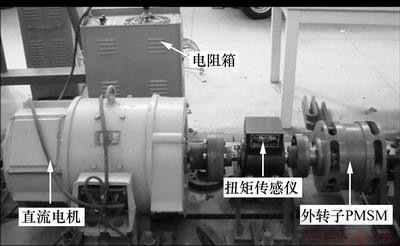
ͼ6 ��������ƽ̨
Fig.6 Test platform of prototype
3 PMSM���ŷ������о�
����ͬ�����ٿ��Ʋ��Ժܶ࣬����ʸ�������ǽϵ��͵Ŀɿ����еķ�����ʸ�����ƵĻ���˼���������ཻ�������ģ��ֱ�����ת�ؿ��ƵĹ��ɣ��ڴų����������ϣ������ӵ���ʸ���ֽ�ɲ�����ͨ�����ŵ��������Ͳ���ת�ص�ת�ص�����������ʹ2���������ഹֱ���˴˶�����Ȼ��ֱ���е��ڣ�ʵ��ת�ؿ���[12-14]����������ͬ���ŷ��綯�����Ӿ�ֹ����ABC����ϵ�任��dq����ϵ���תTem������ʽ���㣺
 (7)
(7)
��ʽ(7)���Կ�������PMSM���ת�صĿ��ƻ�����ȡ���ڶԽ��������ֱ������Ŀ��ơ�PMSM�ĵ������Ʋ���Ҫ��id=0���ơ���������ơ����ת�ص����ȿ��ơ�cos ��=1���Ƶȡ�����ѡȡ���id=0�ų�������Ʒ�ʽ���÷�ʽ�ܹ���Ч�����������෴Ӧ������ȥ�����ã�������ͭ�ģ�����������붨�ӵ��������ȣ����ڶԵ��ת�ؽ��п��ơ�
ʸ������һ��ͨ���������ת��λ�ü���ֵ�����ƶ��ӵ������ѹ����ˣ���Ҫ�õ�ȷת��λ�ú��ٶ��źţ�Ŀǰ�����ô���������ȡ�����õ�λ�ô������й����������������������ű������ȣ�Ӧ�ü���Ҳ�Ƚϳ��죬���ǣ�λ�ô������ڵ���ŷ�ϵͳ�еĴ���Ҳ����һϵ��ȱ�ݣ�ϵͳ�ɱ����ӣ���װ��ά�����ѣ������ܻ���Ӱ����ڸ��¡���ʪ���ȶ��ӻ���������������������ԭ���������ŷ����ƿ�ʼ�ںܶ����������ͳ�ŷ����ơ��綯����PMSM���������ڱȽ϶��ӵĻ������ر��Ǵ��ڽ�ǿ����ʱ������ʺϲ����������ŷ����ơ�
���Ķ���ת��PMSM���������ŷ����ƽ����о������������ŷ������У�ת��λ�ú�ת��ͨ�����ֲ�ͬ�Ĺ��㷽�����õ���ͼ7��ʾΪ����ͬ��������ʸ������ϵͳ��ͼ[13]��

ͼ7 ����ͬ��������ʸ������ϵͳ
Fig.7 Sensorless vector control system of PMSM
�ٶȺʹų��Ŀ�����dOq����ϵ����ɣ�ת�ٸ����ź���ת�ٹ۲��������ת�ٽ��бȽϣ������ٶ�PI���������õ�ת�ص���iq�����źţ�ת�ص�����PI��������õ�ת�ص�ѹ������ֱ������ջ����Ƶõ��ĵ�ѹ����������任��SVPWM����PWM�����źţ�����������ţ�ʵ������PMSM��ʸ�����ơ�
���û�ģ�۲����㷨������MATLAB /SIMULINK���ŷ�����ϵͳ���з��������ģ�Ͳ�����������IJ������������������ʼת�ظ���Ϊ2 N��m��ת���ȶ�����0.2 sʱ����ͻ��Ϊ20 N��m��
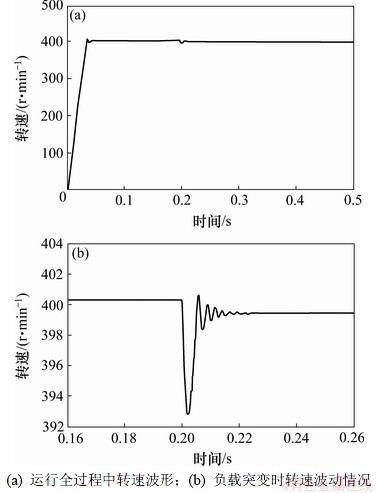
�ڸ���ת��Ϊ400 r/minʱ��ͨ����������۲����õ���ʵ��ת�ٲ�����ͼ8��ʾ�����У�ͼ8(a)��ʾΪ����ȫ�����е�ת�ٲ��Σ�ͼ8(b)��ʾΪ����ͻ��ʱת�ٲ����IJ��Ρ�
�ɻ�ģ�۲����õ��Ĺ���ת�ٲ�����ͼ9��ʾ�����У�ͼ9(a)��9(b)��ʾ�ֱ�Ϊ����ȫ������ת�ٲ��κ���ͻ��ʱת�ٲ����������
��ͼ8��ͼ9���Կ�����ת�ٵ���̬�����1 r/min���ڣ������ش�2 N��mͻ����20 N��mʱ��ת�ٲ�����ΧΪ7~8 r/min��
�ɻ�ģ�۲����õ��Ĺ���ת��λ�ý�Ĭ��Ϊ0~2�У�����沨����ͼ10��ʾ��
��ͼ10��ʾ�Ĺ���ת��λ�ýǻ��㵽0~�ޣ����������۲����õ���ʵ��ת�ӽǽ��бȽϣ���ͼ11��ʾ����ͼ11���Կ�����2���������غϣ�˵����ģ�۲����ܹ��ܺõظ���ת��λ�á�

ͼ8 �۲����õ���ʵ��ת�ٲ���
Fig.8 Waveform of actual speed obtained by observer
ͼ9 ����ת�ٲ���
Fig.9 Waveform of estimated speed
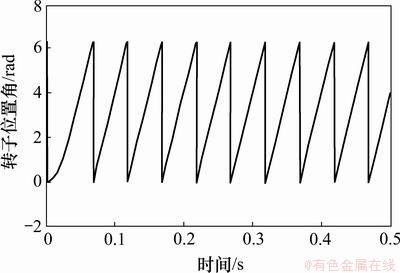
ͼ10 ����ת�ӽǶ�
Fig.10 Estimated rotor angle
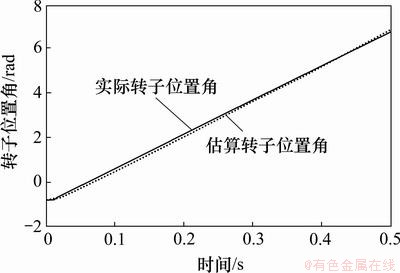
ͼ11 ����ת�ӽǶ���ʵ�ʽǶ�ƫ��
Fig.11 Deviation between estimated and actual rotor angle
�ɷ�������۲����õ������ת���붨������������ηֱ���ͼ12��ͼ13��ʾ��
��ͼ12��ͼ13���Կ�������ģ�۲����ܹ���ȷ�ط������ת�ٺ�ת��λ�ã�����ͻ���ת�ٲ�����С��ϵͳ�ɼ���ǰ����̬������غ��µ���̬�����ʱ��ԼΪ0.02 s����Ӧ�ܿ죬˵��ϵͳ������Ŷ����н�ǿ��³���ԡ�
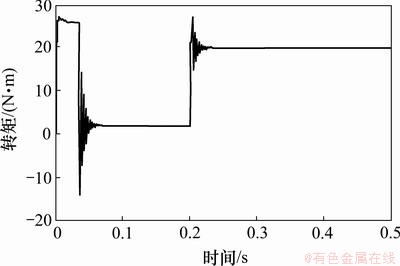
ͼ12 ���ת��
Fig.12 Output torque
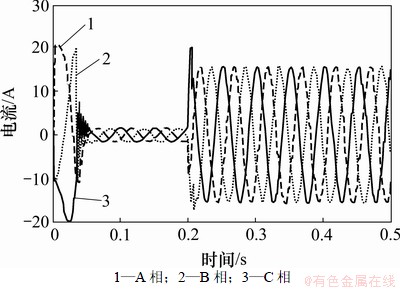
ͼ13 �����������
Fig.13 Three-phase stator current
4 ����
(1) �����һ����ת�ӽṹ�ĵ綯���õ���ֱ��ʽϡ������ͬ���綯�������ñ������ʽת�Ӵ�·��ʹ�������ܱ���һ�������ԣ���������ߵ綯���ġ����š�������������֤�Ͽ��ĺ㹦�����е��ٷ�Χ�����õĶ�̬���ܡ�
(2) ��1̨3 kW���ת��Ϊ400 r/min��6��������ת��PMSM����������ơ����������ԡ����ôų�����Ԫ��������ϵ�Ч��·����ķ������ɽ��͵������õ�Ч��·����ƴ��������Ӱ�죬��������ߵ����Ʒ�����ȷ�ȡ�
(3) ��ģ�۲����㷨�ܹ���ȷ�ع�����ת�ٺ���ת��λ�ã����Ը��ر仯������Ŷ����н�ǿ��³���ԣ���ʸ�����Ʒ��������ȡ���˽Ϻõ�Ч����
�ο����ף�
[1] ���վ�, �⺺��, ��ɭ. �綯�����������Ƽ����ķ�չ[J]. ��С�͵��, 2001, 28(1): 35-38.
YOU Linjuan, WU Hanguang, LEI Desen. Development of electrical vehicle motor and control technology[J]. Small and Medium Electric Machines, 2001, 28(1): 35-38.
[2] ����ǿ. �綯����ֱ��ʽ����ų���챵���о���ʵ��[D]. �人: ���пƼ���ѧ��������ӹ���ѧԺ, 2007: 1-10.
CHU Wenqiang. Study on in-wheel transverse-flux permanent magnet machine (TFPMM) for EV[D]. Wuhan: College of Electrical and Electronic Engineering. Huazhong University of Science and Technology, 2007: 1-10.
[3] ���Ӿ�, �. ���ٴ�����ֱ�������綯���о���Ӧ�ý�չ[J]. �ص��, 2007(5): 46-49.
WANG Yanjue, YANG Kai. New progress on the research and application of low speed high torque direct drive motors[J]. Small & Special Electrical Machines, 2007(5): 46-49.
[4] FENG Yaojing, YANG Kai, GU Chenglin. Design and optimization of external-rotor torque motor[C]//ICEMS 2009 12th International Conference on Electrical Machines and Systems. Tokyo, Japan, 2009: 15-18.
[5] YANG Kai, FENG Yaojing. Design of novel spiral magnetic poles and axial-cooling structure of outer-rotor PM torque motor[J]. IEEE Transaction on Applied Superconductivity, 2010, 20(3): 838-841.
[6] Chen G H, Tseng K J. Design of a permanent-magnet direct-driven wheel motor drive for electric vehicle[C]//27th Annual IEEE Power Electronics Specialists Conference (PESC '96 Record). Baveno, Italy, 1996: 1933-1939.
[7] Chau K T, Zhang D, Jiang J Z, et al. Design of a magnetic- geared outer-rotor permanent-magnet brushless motor for electric vehicles[J]. IEEE Transactions on Magnetics, 2007, 43(6): 2504-2506
[8] Choi J H, Chun Y D, Han P W, et al. Design of high power permanent magnet motor with segment rectangular copper wire and closed slot opening on electric vehicles[J]. IEEE Transactions on Magnetics, 2010, 46(6): 2070-2073.
[9] �����, ����, �Է�, ��. ���ø��������ŵ������ϵͳ���з�[J]. ��������, 2011, 33(10): 880-884.
WEN Xuhui, LIU Jun, ZHAO Feng, et al. Research and development of high performance permanent magnet motor drives for electric vehicles[J]. Automotive Engineering, 2011, 33(10): 880-884.
[10] Gan J Y, Chau K T, Chan C C, et al. A new surface-inset, permanent-magnet, brushless DC motor drive for electric vehicles[J]. IEEE Transactions on Magnetics, 2000, 36(5): 3810-3818.
[11] Lim S Y, Lee J. A design for improved performance of interior permanent magnet synchronous motor for hybrid electric vehicle[J]. Journal of Applied Physics, 2006, 99(8): 08R308-08R308-3.
[12] FENG Yaojing, YANG Kai. Research of sensorless control for permanent magnet synchronous motor[C]//ICEMS 2010 13th International Conference on Electrical Machines and Systems. Korea, 2010: 1282-1286.
[13] ��Ⱥ��, ����ʩ. ��ˢֱ���綯���Ķ�̬����[J]. �Ϸʹ�ҵ��ѧѧ��: ��Ȼ��ѧ��, 2000, 23(1): 53-56.
WANG Qunjing, SUN Mingshi. Dynamic simulation of BLDC motor[J]. Journal of Hefei University of Technology: Natural Science, 2000, 23(1): 53-56.
[14] WEN Jianping, CAO Binggang. A robust MTPA controller for high efficiency IPM synchronous motor[C]//2009 IEEE Intelligent Vehicles Symposium. Xi��an, China, 2009: 829-832.
(�༭ �²ӻ�)
�ո����ڣ�2012-09-07�������ڣ�2012-12-10
������Ŀ������ʡ�Ƽ��ƻ���Ŀ(2012FJ3042)�����ϴ�ѧ�������ʦ�ɳ��ƻ�����Ŀ(531107040650)�����ʿƼ���������ר��(2011DFA62240)
ͨ�����ߣ�������(1978-)���У����������ˣ������ڣ����µ�����������ܿ����о����绰��0731-84099015��E-mail: tikolin@126.com

