桥式吊车自适应滑模模糊竖直起降控制器设计
王鹏程,方勇纯,马博军
(南开大学 机器人与信息自动化研究所,天津,300071)
摘要:针对欠驱动桥式吊车在起降过程中的定位与防摆问题,提出一种基于滑模模糊方法的自适应竖直起降控制策略,所提出的控制策略包括负载起降控制器与自适应防摆控制器2个部分。其中,起降控制器的目的是使负载平稳地达到指定高度,为此首先根据目标位置规划了一条理想的起降运动轨迹,然后通过将前馈与PD(Proportional-derivative)控制相结合来实现对理想轨迹的跟踪。防摆控制器将滑模控制与模糊控制相结合,它对系统参数变化、外界噪声具有很强的鲁棒性,同时引入了反映绳长变化的自适应调整机制,增强了起降过程中控制系统对绳长等参数变化的适应能力。通过大量的实验结果,验证了所提出的竖直起降控制策略可以有效地抑制负载的摆动,从而使其在起降过程中水平位置基本保持不变,并快速准确地达到指定的高度。
关键词:欠驱动系统;桥式吊车;滑模模糊控制;竖直起降
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0090-07
Adaptive sliding-mode fuzzy control of
an overhead crane system for hoisting and lowering process
WANG Peng-cheng, FANG Yong-chun, MA Bo-jun
(Institute of robotics and automatic information system, Nankai University, Tianjin 300071, China)
Abstract: An adaptive sliding mode fuzzy anti-swing hoisting and lowering control approach is proposed for an underactuated overhead crane system. The strategy includes a hoisting and lowering controller and an adaptive anti-swing controller. The former controller aims to transport the payload to the desired height smoothly. To achieve that, a reference hoisting or lowering trajectory for the payload is firstly planned according to the destination position. The payload is driven to track the planned trajectory by a controller consisting of PD (Proportional-derivative) and feedforward control method. The latter one, consisting of a sliding mode mechanism and a fuzzy logic law, presents strong robustness over the variety of the system parameters and various noises. In addition, an on-line tuning mechanism is introduced to deal with the uncertainties including varying rope length which further reinforces its adaptability of the crane control system. Superior performance of the constructed controller is demonstrated by multiple experiments on a prototype overhead crane, which results prove that the strategy can suppress the swing of the payload effectively and keep the horizontal position of the payload invariable during the hoisting or lowering process.
Key words: underactuated system; overhead crane; sliding mode fuzzy control; hoisting and lowering operations
桥式吊车因其具有简单的结构,良好的可操纵性,在工业与运输领域中有着十分广泛的应用。在操作过程中,主要依靠台车将悬挂在吊绳上的负载牵引到指定的空间位置,同时应尽可能减小负载的摆动,以提高运送效率与安全水平。分析桥式吊车的动力学模 型[1]可以得知:它是一种典型的非线性欠驱动系统。为了解决这类欠驱动系统的控制问题,研究人员先后设计了输入整形[2]、最优控制[3]、反馈线性化[4]、基于能量分析的非线性控制[5-6]等多种控制策略,力求在准确定位台车的同时有效地抑制负载的摆动,或考虑吊车系统在紧急制动情况下的控制器设计[7]。由于桥式吊车的欠驱动特性,要同时实现这2方面的要求难度很大,近年来,很多专家尝试应用模糊控制[8]、神经网络[9]等智能控制方法来提升桥式吊车系统的性能,其中尤以模糊控制应用最为普遍。有些学者将运输过程中的台车位置误差与负载摆角作为输入量,并利用经验制定模糊规则;然后,根据这些规则计算得到合适的控制量,最终实现负载的快速定位与摆动抑 制[10]。对于被控对象中存在的死区特性,文献[11]中引入了切换控制策略,提高了台车的定位精度。考虑到风力、碰撞、摩擦等不确定因素对系统性能的影响,Chang等设计了一种自适应模糊控制器,它可对输入变量模糊集进行在线调整,增强了系统的鲁棒性[12]。考虑到变结构控制可以提高系统的鲁棒性,王伟等将滑动模态嵌入模糊控制方法中,将位置误差与角度误差的滑模面作为模糊控制的输入,构造得到了一种合适的模糊滑模控制器,并将其应用于桥式吊车系统中,取得了较好的控制效果[13-14]。进一步考虑到滑模面斜率对系统状态变化的影响,在上述控制器中引入了自适应机制,根据误差情况对滑模面斜率进行在线调整,提高了系统的自适应能力[15]。值得指出的是:当前在桥式吊车控制系统设计方面的研究大都集中在运送过程中的台车定位与负载防摆控制,而对于负载起降过程的研究则非常少。在起降过程中,当吊绳没有处在完全竖直的位置,或者受到意外碰撞、风力等因素的影响时,负载很容易发生摆动,这种摆动将对周围的工作人员或其他设备构成严重威胁,因此,需要实现负载的竖直起降控制,以提高吊车系统的安全性。基于这种原因,本文作者设计并实现了一种基于滑模模糊方法的自适应竖直起降控制策略,它可以使负载快速准确地达到指定的高度,并将其水平位置基本保持不变。为此,首先设计了竖直方向上的控制器来升降负载,同时为了抑制负载的摆动,将文献[16]的控制策略进行了改进,引入了针对吊绳长度变化的自适应机制,构造了一种负载竖直起降控制器,它能很好地抑制起降过程中由于外界干扰导致的负载摆动,使负载迅速回到原来的水平位置。后通过大量实验结果验证了这种竖直起降控制器的良好性能。
1 系统分析与整体控制策略设计
本文研究的三维(3D)桥式吊车系统的模型如图1所示[1],系统有5个自由度,包括:台车的水平位置x和y,负载2个方向摆角 和
和 ,以及吊绳的长度l(在起降过程中,绳长不断变化),而控制向量则为三维,即台车2个方向的控制力fx和fy,以及吊绳的控制力fl。 显然,桥式吊车是一种欠驱动系统,台车任一方向的控制力都需要同时实现抑制负载摆角和准确定位台车2个目标。
,以及吊绳的长度l(在起降过程中,绳长不断变化),而控制向量则为三维,即台车2个方向的控制力fx和fy,以及吊绳的控制力fl。 显然,桥式吊车是一种欠驱动系统,台车任一方向的控制力都需要同时实现抑制负载摆角和准确定位台车2个目标。

图1 3D桥式吊车模型
Fig.1 Model of 3-dimensional overhead crane
竖直起降的目的在于使负载的升降过程快速、平稳,台车定位准确并尽可能保证吊绳竖直。为此,需要及时抑制负载在起降过程中由于干扰引起的摆动,使其达到目标高度的同时尽量维持水平位置不变。桥式吊车是一种强耦合的非线性被控对象,台车位置与负载摆角之间存在很强的动力学耦合特性,而且台车在2个方向上的状态量之间也互相耦合。同时,系统中存在的摩擦等扰动也呈现出高度的非线性特性[1],需要在控制过程中对其进行有效补偿。此外,对于不同的起降过程,吊绳的长度和负载的质量都有所差异,而系统通常要求无需调整控制增益即可保持其性能指标基本不变。综合以上因素可以看出,如何设计一种高性能的控制器,使其对于不同的负载均能实现竖直起降是一个具有重要意义的问题。
根据控制目标与吊车系统的欠驱动特性,设计了一种基于自适应滑模模糊策略的竖直起降器,其整体结构如图2所示。其中:起降控制器通过吊绳拉力来控制绳长的变化,以实现负载的升降。对于防摆控制,首先将三维桥式吊车近似解耦为x方向和y方向2个互相独立的二维子系统[15-16],然后在这2个单方向上分别设计防摆控制器来抑制负载的摆动。

图2 竖直起降控制系统结构图
Fig.2 Structure of hoisting and lowing control system
2 起降控制器设计
这里针对起降过程中负载在竖直方向上的位移(表现为吊绳长度的变化)进行控制,首先根据平稳性方面的要求设计了一条负载起降参考轨迹;然后,利用前馈补偿结合反馈控制器使实际绳长变化可以跟踪该参考轨迹,以达到平稳控制的目标。
根据实际吊车的操作流程,将起降过程依次分为3部分:加速段、匀速段与减速段。在规划轨迹时,考虑到起降效率和平稳性两方面的要求,在加速段和减速段均选择匀加速运动,加速度为系统允许的最大加速度;而在匀速段,负载以允许的最大速度匀速升降。这样就保证了吊车具有较高的运送效率,而且台车速度连续平稳变化,从而为随后设计跟踪控制器带来方便。
为了使台车跟踪设定的轨迹,我们将前馈环节与比例-微分(PD)控制相结合来生成控制量。其中:前馈力fl1主要用来补偿负载(质量为m)重力mg,并在竖直方向上提供期望的加速度al。为此,设计前馈补偿环节如下:
 (1)
(1)
在理想情况下,即无摩擦与负载无摆动, 且
且 时,
时, 可保证负载沿着规划好的理想轨迹运动。
可保证负载沿着规划好的理想轨迹运动。
在抑制负载摆动并将其拉回水平方向原位置的过程中,台车移动的牵引力和负载摆动的离心力都会在竖直方向上产生耦合运动,因而使负载无法跟踪参考曲线。如果应用前馈的方法补偿这部分由负载摆动引起的拉力,就需要根据台车、负载的相对位置、运动速度和加速度,经过复杂计算得到补偿力。然而,在实际系统中,测量噪声等因素会使这部分补偿严重失真。由于上述原因,通过前馈方法无法对这些因素进行完全补偿。在本文中,综合分析吊车系统的特点和实验结果,在前馈环节之外,采用PD反馈控制器来实现控制目标:
 (2)
(2)
其中:Kp和Kd分别为比例控制增益与微分控制增益,el则为实际长度l与参考轨迹lr之间的误差:

综合以上分析,通过将上述前馈环节与PD反馈控制相结合,如下复合控制方法使负载在竖直方向上跟踪规划好的理想轨迹:
 (3)
(3)
3 防摆控制器设计
在起降过程中,当负载没有完全处在竖直位置,或者受到各种不确定干扰的影响时,负载会在水平方向上产生位移。为此,需要设计一种合适的防摆控制器来抑制负载的摆动,考虑到升降过程中绳长的变化,这种防摆控制器应对绳长等参数具有较强的鲁棒性。
为了简化随后的设计和分析,将原来的三维定绳长模型进行分析解耦之后,可以得到2个近似独立的二维吊车模型。由于2个方向上的模型结构相同,因此,可以采用类似的控制方法。本文以其中一个方向为例来设计防摆控制器,该方向的定绳长模型如 下[15]:

 (4)
(4)

 (5)
(5)
其中: ,表示系统状态与其变化率的向量,
,表示系统状态与其变化率的向量, ;x1,x2,x3和x4分别为台车在该方向的位移和速度、负载摆角及角速度;f1(x),b1(x),f2(x)和b2(x)是关于x的非线性函数。
;x1,x2,x3和x4分别为台车在该方向的位移和速度、负载摆角及角速度;f1(x),b1(x),f2(x)和b2(x)是关于x的非线性函数。
为了简化设计,将整个抗摆控制器分解为2步来设计:首先忽略绳长等因素,通过滑模模糊控制方法来实现抗摆的目标;在此基础上,通过引入一种自适应环节来处理升降过程中的绳长变化。
3.1 滑模模糊控制
对于系统(4)和(5),若暂不考虑绳长变化,则防摆控制器的期望状态为 :
:

因此,定义跟踪误差 为:
为:

根据上述误差信号,分别构造如下的位置滑模s1与摆角滑模s2 2个一级滑模:
 (6)
(6)
 (7)
(7)
其中:λ1>0, λ2>0,分别为2个滑模面的斜率。
进一步,为了综合考虑台车位移和负载摆角两方面的因素,并减少模糊规则的条数,降低系统的复杂度,通过将2个一级滑模面进行综合来构造如下的二级滑模面s:
 (8)
(8)
其中:kS为比例系数;λ3则为滑模面s的斜率。为了提高滑模控制器的性能,在升降过程中,系统根据摆角等状态利用模糊调节器在线调整参数λ2和λ3。具体而言,根据误差e3对参数λ2进行在线调节,以尽可能减少负载的摆动;同时,根据s2来调节参数λ3,使控制器能同时兼顾台车定位误差与抑制负载摆角两方面的要求。
对于上述滑模模糊控制策略,根据操作经验和实验结果制定了模糊规则,其中2个模糊调节器各有3条,而模糊控制器有5条。模糊规则与隶属度函数的确定充分考虑了误差在不同值时控制器所需的输出力与滑模面斜率,并包含饱和与死区特性。从而将滑模变量作为输入,采用三角形隶属度函数进行模糊化处理,然后利用模糊规则,并以重心法解模糊输出,可以计算得到系统的控制量。
3.2 针对绳长变化的参数自适应调整
对于起降过程,在消除负载摆动的过程中,吊绳长度也在不断变化,这个因素对负载的摆角会产生一定的影响。此外,在操作过程中,对负载摆动的抑制需要通过台车的移动来实现。根据实际操作和实验结果可以得知:在防摆过程中,抑制摆角所需的台车移动距离主要决定于负载在水平方向上的摆动幅度,而不是摆角。显然,在摆角相同时,绳长越长则摆动幅度越大,此时需要的台车移动距离以及施加在台车上的控制量也随之增大。
基于以上分析可知:在起降过程中,需要设计一种能处理绳长变化的参数自适应调整机制。为此,首先将角度滑模面修改为负载的摆幅滑模面,并使模糊调节器在线调节负载摆幅与台车位置误差滑模之间的权重,提高防摆控制器对于绳长变化的适应能力。因此,考虑绳长的变化,在式(8)中的斜率因子λ3中引入与绳长相关的部分,将斜率因子修改如下:
 (9)
(9)
其中: 为修改之后的斜率因子;l为当前时刻的绳长;常数c根据实验结果来设定。利用(9)式可将(8)式修改如下:
为修改之后的斜率因子;l为当前时刻的绳长;常数c根据实验结果来设定。利用(9)式可将(8)式修改如下:
 (10)
(10)
式(10)即为考虑绳长变化的二级滑模面。式中,由于变量 随绳长l变化,因此,它不但可以描述摆角的大小与变化趋势,还可以在一定程度上衡量负载的摆幅。在此基础上,利用式(10)得到的二级滑模面s是负载摆幅与台车位置误差的综合,防摆控制器的目标则相应调整为抑制负载的摆幅,因此,减小了升降过程中绳长变化对防摆控制器性能的影响。随后的实验结果也证实了这种设计可以明显降低绳长变化对负载摆动的影响,提高了防摆控制器对不同绳长的适应能力。
随绳长l变化,因此,它不但可以描述摆角的大小与变化趋势,还可以在一定程度上衡量负载的摆幅。在此基础上,利用式(10)得到的二级滑模面s是负载摆幅与台车位置误差的综合,防摆控制器的目标则相应调整为抑制负载的摆幅,因此,减小了升降过程中绳长变化对防摆控制器性能的影响。随后的实验结果也证实了这种设计可以明显降低绳长变化对负载摆动的影响,提高了防摆控制器对不同绳长的适应能力。
4 实验结果与分析
为了验证控制器的有效性,在图3所示的吊车实验平台上进行了实验,以测试所设计的竖直起降控制器的性能。
在该实验平台中,在x方向上只有台车运动,其质量为mx=6.5 kg,在y方向上则是台车与桥架同时运动,其质量和为my=30 kg,负载为m=1.025 kg。对吊车系统经过充分调节以后,可以得到良好的控制性能,此时有关参数分别为:在x和y方向上均有λ1=0.5,c=2.25,而λ2∈[2.5, 3]与k∈[-0.7, -0.2]则由模糊调节器在线确定。由于mx和my不同,其参数也有所差异,在x方向上kS=80,而y方向上kS=200。
进行了以下2组综合性实验,分别测试升、降2个过程的响应特性。在实验过程中加入了多次扰动(在某时刻人为将负载拉离平衡位置,以模拟在负载起降过程中意外碰撞或风力的影响),记录实验过程中台车、负载位置与绳长变化跟踪情况。

图3 三维桥式吊车实验平台
Fig.3 3-dimensional overhead crane testbed
第1组:在绳长由0.15 m增至0.85 m的降落过程中,负载在不同方向上在t 1,t 2和t 3时刻分别施加3次人为扰动,得到的控制效果如图4~6所示。
第2组:在绳长由0.80 m降至0.20 m的提升过程中,对负载施加1次扰动,控制效果如图7~9所示(t 1时刻施加扰动)。
在2组实验结果中,图4和图7所示为绳长变化跟踪效果,其中l和l r分别为实际绳长与绳长变化参考轨迹;图5和图8所示为起降过程中台车的位置变化;图6和图9所示则为负载两维摆角的变化曲线。
从图4和图7可以发现:在负载摆动和台车运动时,吊绳长度l能够很好地跟踪参考轨迹lr。在加速与减速段变速过程比较平缓,基本无超调和静差;在匀速段可以保持在允许的最大速度,兼顾了效率与安全性2个方面的要求。
从图9可以看出:虽然对负载施加的扰动摆角达30°以上,但控制器可使其在2个摆动周期内收敛至很小的范围。从图6可以看出:在降落过程中从不同方向分别施加了3次扰动(表现为负载摆角的突然变化),尽管扰动作用时的吊绳长度不同,但是摆角抑制过程并没有明显差别,且负载升降平稳,验证了抗摆控制器对不同绳长的适应能力。
从图5和图8可以看出:台车位置的稳态误差很小。特别是在图5中,虽然系统受到多次扰动,但台车调整方式与稳态误差未发生明显变化。
为进一步说明本文设计的竖直起降控制器的良好性能,分别利用PD控制器与常规滑模控制器对第2组实验的负载提升过程进行控制,并将实验结果与图7~9进行对比分析。
当只根据台车位置误差进行PD控制时,由于系统不会主动利用台车的运动来衰减负载的摆动,因此,这种控制器的摆动抑制效果很不明显。

图4 绳长实际变化与参考曲线对比(实验一)
Fig.4 Comparison of cable length trajectories (Experiment 1)

图5 台车x和y方向位置曲线(实验一)
Fig.5 Trolley’s 2-dimensional position (Experiment 1)

图6 负载两维摆角曲线(实验一)
Fig.6 Payload’s 2-dimensional swing angles (Experiment 1)

图7 绳长实际变化曲线与参考曲线对比(实验二)
Fig.7 Comparison of cable length trajectories (Experiment 2)

图8 台车x和y方向位置曲线(实验二)
Fig.8 Trolley’s 2-dimensional position (Experiment 2)
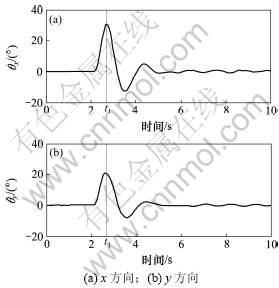
图9 负载两维摆角曲线(实验二)
Fig.9 Payload’s 2-dimensional swing angles (Experiment 2)
将本文中控制器的模糊调节器去掉,即固定各滑模面斜率于适当值(实验中将其设为λ2=2.7与k=0.45),此时的控制器可以看作一种对台车位置和负载摆角同时进行反馈的线性控制器。重复第2组实验过程,得到的台车与负载运动情况分别如图10和图11所示(系统在t 1时刻施加扰动)。
将图10和图11与图8和图9进行对比可以看出:由于缺少模糊调节器实时调节滑模面斜率,摆角的抑制时间与超调量(图11)均明显增加,而负载需要经过若干个周期的摆动方能达到稳定,因此,台车的稳定时间也相应延长(图10)。
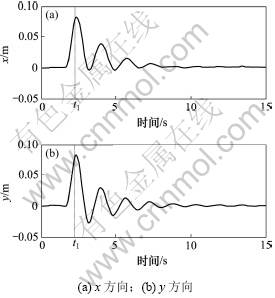
图10 台车x和y方向位置曲线(滑模控制)
Fig.10 Trolley’s 2-dimensional position (SMC)

图11 负载两维摆角曲线(滑模控制)
Fig.11 Payload’s 2-dimensional swing angles (SMC)
综合分析以上实验结果可以看出:本文所设计的竖直起降控制策略具有很好的控制效果,即使在负载受到大的扰动时,控制系统也可以使其摆动很快得到衰减。同时,这种控制方法对于绳长变化具有很强的适应能力,非常便于实际应用。
5 结论
本文设计并实现了一种桥式吊车负载竖直起降控制策略,使负载在起降过程中因扰动引起的摆动可以得到快速抑制,并且整个起降过程非常平稳。该控制策略包括起降控制器和防摆控制器2个部分。其中,结合PD与前馈环节的起降控制器可以使负载较好地跟踪参考轨迹,克服摆动对吊绳拉力的影响,最终使负载垂直定位准确;而防摆控制器则是一种自适应模糊滑模控制器,它通过引入自适应机制增强了系统对于升降过程中绳长变化的鲁棒性。最终通过大量实验,有力地验证了本文所设计的竖直起降控制器的有效性。在后续工作中,将进一步优化控制器,使其对小幅持续扰动具有较好的控制效果;此外,考虑在控制器中引入切换机制,以更好地补偿系统中存在的摩擦力等因素,减小负载定位的稳态误差。
参考文献:
[1] 马博军, 方勇纯, 刘先恩, 等. 三维桥式吊车建模与仿真平台设计[J]. 系统仿真学报, 2009, 21(12): 3798-3803.
MA Bo-jun, FANG Yong-chun, LIU Xian-en, et al. Modeling and simulation platform design for 3D overhead crane[J]. Journal of System Simulation, 2009, 21(12): 3798-3803.
[2] Auernig J W, Troger H. Time optimal control of overhead cranes with hoisting of the load[J]. Automatica, 1987, 23(4): 437-447.
[3] Singhose W E, Porter L J, Seering W P. Input shaped control of a planar gantry crane with hoisting[C]//Proceedings of the American Control Conference. Albuquerque, New Mexico, USA, 1997: 97-100.
[4] Boustany F, d'Andrea-Novel B. Adaptive control of an overhead crane using dynamic feedback linearization and estimation design[C]//Proceedings of the 1992 IEEE International Conference on Robotics and Automation. Nice, France, 1992: 1963-1968.
[5] Fang Y, Dixon W E, Dawson D M, et al. Nonlinear coupling control laws for an overhead crane system[J]. IEEE/ASME Transactions on Mechatronics, 2003, 8(3): 418-423.
[6] Fang Y, Dixon W E, Dawson D M, et al. Nonlinear coupling control laws for a 3-DOF overhead crane system[C]// Proceedings of the IEEE Conference on Decision and Control. Orlando, Florida, USA, 2001, 4: 3766-3771.
[7] Ma B, Fang Y. Switching based emergency braking control for an overhead crane system[J]. IET Control Theory Appl, 2010, 4(9): 1739-1747.
[8] Chang C, Huang G. Fuzzy control of nonlinear crane system[C]//Proceedings of the 2006 IEEE/SMC International Conference on System of Systems Engineering. Los Angeles, California, USA, 2006: 155-160.
[9] Toxqui R, Yu W, Li X. Anti-swing control for overhead crane with neural compensation[C]//Proceedings of the 2006 International Joint Conference on Neural Networks. Vancouver, British Columbia, Canada, 2006: 4697-4703
[10] Chang C, Chiang K, Hsu S. Fuzzy controller for the 3-D overhead crane system[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Biomimetics. Hong Kong and Macau, China, 2005: 724-729.
[11] Chang C, Hsu S, Chiang K. The switching fuzzy controller of the overhead crane system[C]//Proceedings of the 2004 IEEE Conference on Control Applications. Taibei, China, 2004: 753-758.
[12] Chang C, Chiang K. Fuzzy projection control law and its application to the overhead crane[J]. Mechatronics, 2008, 18: 607-615.
[13] 王伟, 易建强, 赵冬斌, 等. 桥式吊车系统的分级滑模控制方法[J]. 自动化学报, 2004, 30(5): 784-788.
WANG Wei, YI Jian-qiang, ZHAO Dong-bin, et al. Hierarchical sliding-mode control method for overhead cranes[J]. Acta Automatica Sinca, 2004, 30(5): 784-788.
[14] 王伟, 易建强, 赵冬斌, 等. 基于滑模方法的桥式吊车系统的抗摆控制[J]. 控制与决策, 2004, 19(9): 1013-1016.
WANG Wei, YI Jian-qiang, ZHAO Dong-bin, et al. Anti-swing control of overhead cranes based on sliding-mode method[J]. Control and Decision, 2004, 19(9): 1013-1016.
[15] LIU Dian-tong, YI Jian-qiang, ZHAO Dong-bin, et al. Adaptive sliding mode fuzzy control for a two-dimensional overhead crane[J]. Mechatronics, 2005, 15: 505-522.
[16] Cho S, Lee H. An anti-swing control of a 3-dimensional overhead crane[C]//Proceedings of the 2000 IEEE American Control Conference. Illinois, USA, 2000: 1037-1041.
(编辑 陈灿华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(60875055);天津市应用基础研究计划项目(07JCYBJC05400)
通信作者:王鹏程(1985-),男,天津人,硕士研究生,从事欠驱动系统包括吊车系统控制研究;E-mail: wangpc@robot.nankai.edu.cn

