DOI: 10.11817/j.issn.1672-7207.2019.01.013
网络化牵引控制系统H∞采样控制及其应用
陈刚1, 2,王信1, 2,罗昌胜1, 2,肖伸平1, 2
(1. 湖南工业大学 电气与信息工程学院,湖南 株洲,412007;
2. 电传动控制与智能装备湖南省重点实验室,湖南 株洲,412007)
摘要:基于Lyapunov-Krasovskii稳定性定理,采用采样控制方法,研究具有时滞的网络化牵引控制系统H∞控制问题。利用闭环泛函方法,构造新的包含更多采样点信息的Lyapunov-Krasovskii泛函,从而获得具有更小保守性的稳定性判据。随后,将此判据拓展到含有外部输入以及参数不确定的网络化牵引控制系统中,并给出H∞采样控制器求解方法。实例仿真结果表明:所得H∞控制器能使牵引电机模型状态趋于稳定,说明该求解方法有效的。
关键词:Lyapunov-Krasovskii泛函;网络化牵引控制系统;H∞采样控制器
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2019)01-0091-09
H∞ sampled-data control of networked traction control system and its application
CHEN Gang1, 2, WANG Xin1, 2, LUO Changsheng1, 2, XIAO Shenping1, 2
(1. School of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China;
2. Key Laboratory for Electric Drive Control and Intelligent of Hunan Province, Zhuzhou 412007, China)
Abstract: Based on the Lyapunov-Krasovskii stability theorem, the H∞ control problem of networked traction control system with time delay was studied by sampled-data control approach. By constructing new Lyapunov-Krasovskii functional with loop-functional approach which contains more information of sampling points. A less conservative stability criterion was obtained. Then, the criterion was extended to the network control system with external inputs and uncertain parameter, and the H∞ sampling controller was derived. Finally, in simulink examples, the obtained controller can make the states of networked traction control system stable, which proves that the method is feasible.
Key words: Lyapunov-Krasovskii functional; networked traction control system; H∞ sampling controller
网络化牵引控制系统(networked traction control system,NTCS)是一种拥有独立功能的网络控制系统,它能实现交流异步牵引电机的网络化控制功能。网络控制系统中各个节点信号和数据通过网络进行传输和交换,可以实现远程操作控制要求,并且维护方便、易拓展、灵活性强,具有网络化、智能化和集成化的功能特点。近年来,人们对交流异步电机的网络化控制进行了研究,主要是通过计算机网络的形式来实现1台或多台异步电机组的集群或分散控制,如在动车组中,由于异步牵引电机空间分布的特殊性,要求牵引电机必须通过网络控制系统来实现。然而,网络控制系统的引入必将对列车牵引控制系统产生影响,如产生网络延迟和数据丢包等问题[1-3]。时滞的存在往往使实际工程系统的性能退化,甚至变得不稳定。而在网络化牵引控制系统的分析与设计中,考虑时滞项也会使研究过程变得更复杂。网络控制系统是一种闭环反馈控制系统,其结构由传感器、控制器以及执行器通过无线网络连接而成。对其H∞性能进行控制有多种控制方法,如状态观测器控制[4]、自适应控制[5]、脉冲控制[6]、采样控制[7]等。控制策略要求数字反馈以及数字控制具有及时性、小型化、精确性以及低成本。采样控制作为一种实用、简洁的控制方法,已被广泛运用于实际工程领域。现有的网络控制系统分析方法都是基于线性控制网络[8]实现的,因此,要实现交流异步牵引电机的网络化控制,就必须先对异步电机进行线性化解耦。交流异步牵引电机是一种复杂的非线性系统[9],对其线性化解耦的主要方法是通过非线性状态反馈或输出反馈将非线性系统变换为线性系统。张兴华等[10-11]提出了一种逆系统方法,其实质是应用反馈线性化方法来实现对变量、强耦合、非线性系统线性化。因其不依赖于对非线性系统的求解以及稳定性分析,只需研究系统的反馈变换,因此,这种方法更具有一般性,李欣[12]对此进行了深入分析。对于含有时滞项的线性网络控制系统稳定性的研究,人们常采用基于Lyapunov-Krasovskii稳定性定理的Lyapunov-Krasovskii泛函方法以及线性矩阵不等式方法,该方法的核心包括2个方面:1) Lyapunov- Krasovskii泛函的构建;2) 泛函导数中积分二次型的界定。在对前者的研究中,为获得更小保守性条件,KWON等[13-14]构建的增广泛函以及TIAN等[15-16]提出的分时滞泛函方法都有很好的效果。采样系统的泛函构建中,将更多的采样信息导入泛函中,有可能获得更优判据,但一直没有找到一种普遍方法来构建泛函,在大多数情况下都是根据前人的研究以及经验构建。为此,人们致力于对导数界定方法进行研究,其中最主要的是对积分项的界定方法进行研究,提出了多种方法,如Jensen不等式方法[17]、Writinger不等式方法[18]、自由权积分不等式方法[19-20]、逆凸不等式方法[21]等,本文采用自由权积分不等式方法,对二次型进行界定。首先简单介绍交流异步牵引电机的数学模型,通过逆系统方法得到电机广义逆系统状态状态空间描述。同时,基于此电机系统控制对象,构造网络化牵引控制系统的状态空间模型。其次,利用Lyapunov-Krasovskii泛函方法以及线性矩阵不等式方法对线性网络控制系统进行研究,得到保证系统稳定的充分性条件,并将其拓展到含有外部干扰以及参数不确定的系统中,得到H∞采样控制器的设计方法。在Lyapunov-Krasovskii泛函构建方法中,根据两侧闭环泛函方法[22-23],得到1个新的泛函,其关键是充分导入采样点x(tk)到x(t)以及x(t)到x(tk+1)的信息,并推导出更优稳定性条件。最后,对于网络化牵引电机控制模型,设定具体的数学参数,得到可行H∞采样控制器,同时采用状态轨迹图证明控制器的可行性。
1 问题描述
采用如下标号:矩阵上标“T”和“-1”分别表示转置矩阵以及逆矩阵; 和
和 分别代表n维向量和n×n维矩阵;矩阵P>0表示矩阵P是正定的;diag{b1,…, bn}表示块对角矩阵;0和I分别表示1个合适维度的零矩阵以及合适维度的单位矩阵;sym{P}代表矩阵
分别代表n维向量和n×n维矩阵;矩阵P>0表示矩阵P是正定的;diag{b1,…, bn}表示块对角矩阵;0和I分别表示1个合适维度的零矩阵以及合适维度的单位矩阵;sym{P}代表矩阵 ;标记“*”表示块对阵矩阵中的对称项。
;标记“*”表示块对阵矩阵中的对称项。
1.1 交流异步牵引电机模型
目前,在交流传动电力机车以及动车组上,普遍采用三项交流异步电机作为实现电能量转换的装置。因为交流异步电机在模型上是1个极为复杂、非线性、强耦合且多变量的控制对象,要实现其可行的网络化控制策略,必先进行线性网络化处理。进行如下假设:1) 异步电机中定子、转子绕组是空间对称分布的,且所生成的磁势沿气隙空间正弦分布;2) 不考虑电机铁心的磨耗以及磁路饱和影响,绕组互感、自感为恒定值;3)忽略频率和温度变化对电阻的干扰。
基于上述假设,三相交流异步电机物理模型见图1。图1中,A,B和C表示定子三相绕组轴线;a,b和c表示转子绕组轴线; 表示转子a轴与定子A轴间的电角度,
表示转子a轴与定子A轴间的电角度, 为转子a的转动单速度;ia,ib和ic为转子三轴电流;ua,ub和uc为转子三相电压;iA,iB和iC为定子三相电流;uA,uB和uC为定子三相电压。
为转子a的转动单速度;ia,ib和ic为转子三轴电流;ua,ub和uc为转子三相电压;iA,iB和iC为定子三相电流;uA,uB和uC为定子三相电压。
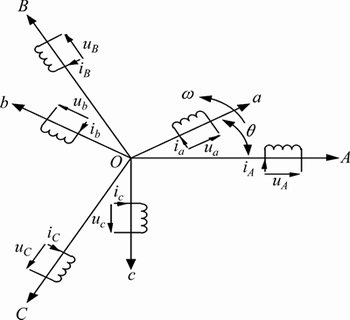
图1 3项交流异步电机物理模型
Fig. 1 Three physical models of AC asynchronous motor
对于该交流异步电机非线性系统,其状态方程在任意时刻的解可写成
 (1)
(1)
其中:x为系统n维状态向量;u为系统n维控制向量;y为系统n维输出向量。
根据李欣[12]提出的异步牵引电机动态等效电路图以及数学模型,可以获得以下交流异步电机状态方程:
 (2)
(2)
其中:
 ;
; ;
;
 ;
;
Rs和Rr分别为定子电阻和转子电阻;Ls,Lr和Lm分别为定子自感、转子自感和定转子互感;ωr为电机转子角速度;pn为电机的极对数;TL为电机的负载转矩; 为状态分量;u为控制输入;y为输出变量。
为状态分量;u为控制输入;y为输出变量。
采用广义逆系统方法对交流异步牵引电机进行线性化解耦,便可以得到以下广义逆系统标准形式:
 (3)
(3)
其中:a10,a11,a12,a20,a21和a22为广义逆系统中不同的参数。对这些参数进行调节,并配置伪线性系统的极点,便可获得系统性能。
1.2 网络化牵引控制系统模型
由于网络的引入,牵引控制系统中的信号传输必将产生延时。在一般情况下,主要存在2种形式的时延:一种是传感器到网络控制器的时延,另一种是网络控制器到牵引控制单元的时延。网络化牵引控制系统结构见图2。
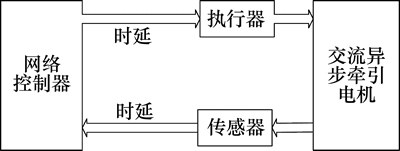
图2 网络化牵引控制系统结构
Fig. 2 Structure of networked traction control system
假设:1) 传感器以时间驱动,以采样周期T对控制对象的输出进行周期采样;2) 网络控制系统以事件驱动,并由外部事件中断机制实施;3) 执行器以事件驱动;4) 网络中存在不确定时延,且不能超过 同时不考虑数据包丢失。当控制率一定时,系统中的2种时延可以合并为闭环网络时延h(t),其值在0到T之间任意变化。
同时不考虑数据包丢失。当控制率一定时,系统中的2种时延可以合并为闭环网络时延h(t),其值在0到T之间任意变化。
基于前面得到的牵引电机系统线性化模型,网络化牵引控制系统的状态空间描述可以写成
 (4)
(4)
其中:x(t),u(t),y和 分别为控制对象状态、控制输入、控制输出以及控制系统的初始状态;A,B和C为具有适当维度的矩阵。
分别为控制对象状态、控制输入、控制输出以及控制系统的初始状态;A,B和C为具有适当维度的矩阵。
假定系统的状态是完全可测的,则有
 (5)
(5)
其中:K为状态反馈输入器;h(t) ∈ [0, T],表示时延,且其变化是随机的。
综合式(4)和(5),网络化牵引控制系统的装填空间模型为
 (6)
(6)
在利用采样方法对该系统进行控制时,首先设2个采样点(tk ,tk+1)之间满足
 (7)
(7)
其中:h1和h2为正标量,表示最大采样间隔。
假设1 系统时滞h(t)总是小于或等于h,且将状态量中的时滞看成采样间隔量,即 ,于是,系统(6)可写成
,于是,系统(6)可写成
 (8)
(8)
本文基于此系统展开研究。
1.3 引理介绍
引理1[20] 对于任意正定对称矩阵Y,2个标量 和β满足β>>0,任意向量ξ1,ξ2∈
和β满足β>>0,任意向量ξ1,ξ2∈ ,以及任意矩阵N1,N2,N3 ∈
,以及任意矩阵N1,N2,N3 ∈ ,则有下面不等式成立:
,则有下面不等式成立:
 (9)
(9)
其中:

 ;
;
 ;
; ;
;
 ;
; ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 。
。
引理2[24] 对于任意合适维度矩阵Y1和Y2,以及1个对称矩阵Y3<0,函数h(t) ∈ [0, h],满足
 <0 (10)
<0 (10)
当且仅当 <0和
<0和 <0同时成立。
<0同时成立。
引理3[25] 存在合适维度的矩阵Ω1,Ω2和Ω3,其中Ω1是对称矩阵,Ω2是对称正定矩阵,则有
 <0 (11)
<0 (11)
当且仅当 <0或者
<0或者 <0成立。
<0成立。
引理4[26] 存在E,F以及 w(t) 为合适维度的矩阵,且w(t) 满足 wT(t) w(t) ≤ In。对于任意标量ε>0,有下面不等式成立:
 (12)
(12)
2 主要结果
为了使表达更加简洁,首先给出下列定义:
 ;
; ;
;
 ;
;
 ;
;
 ;
;
 ;
; ;
;
 ;
; ;
;
 ;
;
 ;
; 。
。
2.1 系统稳定性分析
定理1 给定正常数h1和h2,若存在正定对称矩阵P∈,以及任意矩阵Q∈,Z∈,Xi∈ (i=1, 2),Ti∈(i=1, 2),U12∈,U22∈,Mi ∈(i=1, 2, 3),Ni ∈(i=1, 2, 3),任意对称矩阵U11∈,U13∈,U21∈,U23∈,任意矩阵F∈,则对于h∈[h1,h2],有下面不等式成立:
 <0 (13)
<0 (13)
 <0 (14)
<0 (14)
其中:



 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
; ;
; ;
;
 ;
; ;
; ;
;
 ;
; ;
;
 ;
; ;
;
 ;
; ;
;
 ;
; ;
;
 ;
;
 ;
; ;
;
 ;
; ;
;
 ;
;
 。
。
系统(9)是渐进稳定的。
证明 构建如下增广泛函:
 <
< (15)
(15)
其中:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 。
。
显然,当 <,V(t)是正定的。对函数V(t)求导得
<,V(t)是正定的。对函数V(t)求导得
 < (16)
< (16)
其中:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

 ;
;

 ;
;
对此导数线性化,关键在于对其中2个积分项进行处理。根据引理1,可以得到下列不等式:

 (17)
(17)

 (18)
(18)
其中:N1,N2,N3,M1,M2和M3为任意合适维度的矩阵。
引入1个零项等式:

 (19)
(19)
其中:F为任意合适维度的矩阵。
由式(16)~(19),当tk≤t<tk+1,可以得到下列不等式:

 (20)
(20)
据引理2以及引理3,当式(13)和式(14)成立时, 为负定,
为负定, 正定,故系统(9)是稳定的。
正定,故系统(9)是稳定的。
推论1 在定理1中,因自由矩阵F存在,使得其保守性大大降低。从定理1的推导过程中可以看到:在式(19)中,F出现了3次,为此,不妨可以设3个不同的自由矩阵F1,F2和F2来分别替代其中的F,由此得到的系统(9)稳定性条件能够获得更小的保守性。
2.2 H∞控制器设计
定理1可以拓展到含有时变参数不确定以及外部干扰的网络控制系统之中,构建有如下系统状态方程:
 (21)
(21)
其中:x(t),u(t),y,和 分别表示控制对象状态、控制输入、控制输出、控制系统的初始状态以及系统的外部干扰;A,B,C和D为具有适当维度的矩阵;
分别表示控制对象状态、控制输入、控制输出、控制系统的初始状态以及系统的外部干扰;A,B,C和D为具有适当维度的矩阵; 表示时变参数不确定,且满足
表示时变参数不确定,且满足
 (22)
(22)
其中:H和E为已知常矩阵; 为未知时变矩阵函数,且满足
为未知时变矩阵函数,且满足 。
。
在给出结论之前,先给出如下定义。
定义1 当满足以下2个条件:
1) 闭环系统(21)在没有外部干扰的情况下即 时,是稳定的;
时,是稳定的;
2) 对于存在外部干扰的系统(21),存在标量 ,控制输出
,控制输出 满足
满足
 <
< (23)
(23)
时,闭环系统(21)是关于H∞范数界为稳定的。
为满足定义中条件1),假定系统(21)无外部干扰,则系统状态方程为
 (24)
(24)
于是,根据定理1,可以得到如下定理。
定理2 给定正常数h1 和h2以及矩阵H和E,若存在正定对称矩阵P ∈,以及任意矩阵Q ∈,Z ∈,Xi ∈(i=1, 2),Ti ∈ (i=1, 2),U12∈,U22∈,Mi ∈(i=1, 2, 3),Ni ∈(i=1, 2, 3),任意对称矩阵U11∈,U13∈,U21∈,U23∈,任意矩阵F∈,任意标量ε>0,则对于h ∈ [h1,h2],有下列不等式成立:
 <0 (25)
<0 (25)
 <0 (26)
<0 (26)
其中: ,
, ,
, ,
, ,
, ,
, 和
和 在定理1中已被定义,且
在定理1中已被定义,且 ,
, 。系统(25)是稳定的。
。系统(25)是稳定的。
证明 将不等式(13)和(14)中的A用A+ 替代,并根据引理3以及引理4,便可得到不等式(25)和(26),其证明过程与定理1的证明过程相同。
替代,并根据引理3以及引理4,便可得到不等式(25)和(26),其证明过程与定理1的证明过程相同。
注释1 因定理1中的3个自由矩阵F相同,故可以将它提出来,在定理2的 和
和 中已经体现出来。这种处理方法有利于后面控制器的求解。
中已经体现出来。这种处理方法有利于后面控制器的求解。
对于系统(21),其H∞控制器的求解方法如下。
定理3 给定正常数h1,h2和γ,以及矩阵H和E,若存在正定对称矩阵P ∈,以及任意矩阵Q∈,Z ∈,Xi ∈(i=1, 2),Ti ∈ (i=1, 2),U12∈,U22∈,Mi ∈(i=1, 2, 3),Ni ∈(i=1, 2, 3),任意对称矩阵U11∈,U13∈,U21∈,U23∈,任意矩阵 ∈,G∈,任意标量ε>0,则对于h ∈ [h1,h2],有下面不等式成立:
∈,G∈,任意标量ε>0,则对于h ∈ [h1,h2],有下面不等式成立:
 <0 (27)
<0 (27)
 <0 (28)
<0 (28)
其中: ,
, ,,,,,
,,,,, 和
和 在定理1中已被定义,且
在定理1中已被定义,且

 ;
; ;
;
 ;
; ;
;
 ;
; 。
。
闭环系统(21)是关于H∞范数界为稳定的,其控制器 。
。
证明 在定理1的推导基础上,设
 (29)
(29)
对于系统(24),有如下零项等式:
 ×
× (30)
(30)
对式(30)进行分解,有
 (31)
(31)
设可逆矩阵F,对式(31)中间项两边同时乘以1个可逆矩阵:
 (32)
(32)
其中: 。显然,式(31)依然等于0。
。显然,式(31)依然等于0。
根据定义1中的条件2),有
 <0 (33)
<0 (33)
即
 <0 (34)
<0 (34)
故
 <0 (35)
<0 (35)
在定理2中,证明了定理3是系统(21)在无外部输入稳定的充分条件,同时满足定义1中的条件1)。设可逆矩阵 ,类似定理1中的推导过程,若不等式(27)和(28)同时成立,则式(35)成立,此时,将满足定义1中的条件2),则闭环系统(21)是关于H∞范数界为稳定的。证毕。
,类似定理1中的推导过程,若不等式(27)和(28)同时成立,则式(35)成立,此时,将满足定义1中的条件2),则闭环系统(21)是关于H∞范数界为稳定的。证毕。
注释2 在定理2中,存在非线性项 ,控制器K不能直接通过Matlab工具箱求解。在定理3的证明中,通过在零项等式中间两侧同乘
,控制器K不能直接通过Matlab工具箱求解。在定理3的证明中,通过在零项等式中间两侧同乘 ,可以解决这一问题。
,可以解决这一问题。
3 仿真实例
针对于1.1节得到的网络化牵引控制控制系统模型,选取a10=1,a11=3,a12=1,a20=1,a21=5,a22=1,可得:
 ;
; ;
;
 ;
; ;
;
 ;
; 。
。
假设初始状态γ=0.9,h1=10-5,h2=0.4,g(t)= diag{sin (0.1t),sin(0.3t),sin(0.1t),sin(0.3t)},w(t) =[0.1,0.1,0.1,0.1]T。利用定理3,可以得到H∞控制器参数为

当初始状态为=[3,-4,1,-2]T时,仿真结果见图3和图4。从图3和图4可知此控制器是可行的。
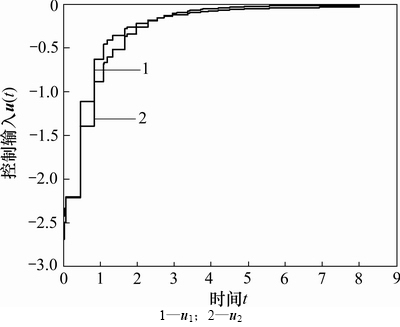
图3 系统(21)的控制输入u(t)
Fig. 3 Control input u(t) of system (21)
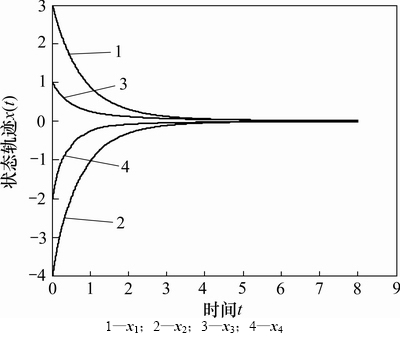
图4 系统(21)的状态轨迹
Fig. 4 State trajectories of system (21)
4 结论
1) 基于采样控制系统,利用闭环泛函方法,构建了1个新的含有更多时滞以及采样点信息的Lyapunov泛函,获得了新的稳定性条件,并通过Matlab工具箱获得了可行控制器参数。
2) 交流异步电动机在电气工程中的应用非常广泛,基于交流异步电动机数学模型并结合采样控制策略,得到保证H∞性能的采样控制器设计方法。
参考文献:
[1] 张敏, 罗安. 一类非线性系统鲁棒控制及应用[J]. 中南大学学报(自然科学版), 2003, 34(2): 188-191.
ZHANG Min, LUO An. Robust control for a class of nonlinear systems and its application[J]. Journal of Central South University(Science and Technology), 2003, 24(2): 188-191.
[2] 陈刚, 王信, 肖伸平, 等. 具有混合时变时滞主从神经网络的指数采样同步控制[J]. 中南大学学报(自然科学版), 2018, 49(6): 1432-1439.
CHEN Gang, WANG Xin, XIAO Shenping, et al. Sampled-data exponential synchronization of master-slave neural networks with time-varying mixed delays[J]. Journal of Central South University(Science and Technology), 2018, 49(6): 1432-1439.
[3] LIU Yajuan, LEE S. H∞ sampled-data control of LPV systems with time-varying delay[J]. Transactions of the Korean Institute of Electrical Engineers, 2015, 64(1): 121-127.
[4] JIANG Guoping, TANG W K, CHEN Guanrong. A state-observer-based approach for synchronization in complex dynamical networks[J]. IEEE Transactions on Circuits & Systems I: Regular Papers, 2006, 53(12): 2739-2745.
[5] LI Xiaojian, YANG Guanghong. Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults[J]. IEEE Transactions on Neural Networks & Learning Systems, 2017, 28(2): 559-569.
[6] YANG Xinsong, CAO Jinde, LU Jianquan. Stochastic synchronization of complex networks with nonidentical nodes via hybrid adaptive and impulsive control[J]. IEEE Transactions on Circuits & Systems I: Regular Papers, 2012, 59(2): 371-384.
[7] WU Zhengguang, SHI Peng, SU Hongye, et al. Exponential synchronization of neural networks with discrete and distributed delays under time-varying sampling[J]. IEEE Transactions on Neural Networks & Learning Systems, 2012, 23(9): 1368-1376.
[8] HESPANHA J P, NAGHSHTABRIZI P, XU Yonggang. A survey of recent results in networked control systems[J]. Proceedings of the IEEE, 2007, 95(1): 138-162.
[9] 冯晓云. 电力牵引交流传动及其控制系统[M]. 北京: 高等教育出版社, 2009: 48-125.
FENG Xiaoyun. Electric traction AC drive and its control system[M]. Beijing: Higher Education Press, 2009: 48-125.
[10] 张兴华, 戴先中. 基于逆系统方法的感应电机调速控制系统[J]. 控制与决策, 2000, 15(6): 708-711.
ZHANG Xinghua, DAI Xianzhong. Control and decision making of induction motor speed control system based on inverse system method[J]. Decision and Control 2000, 15(6): 708-711.
[11] 巫庆辉. 感应电电动动机定子磁链与转矩的逆解耦及存在性[J]. 控制理论与应用, 2009, 26(9): 983-987.
WU Qinghui. Inverse decoupling and existence of stator flux and torque of induction motor drives[J]. Control Theory and Applications, 2009, 26(9): 983-987.
[12] 李欣. 基于列车通信网络的牵引控制系统建模及控制策略研究[D]. 兰州: 兰州交通大学自动化与电气工程学院, 2013: 46-50.
LI Xin. Research on modeling and control strategy of traction control system based on train communication network[D]. Lanzhou: Lanzhou Jiaotong University. College of Automation and Electrical Engineering, 2013: 46-50.
[13] KWON O M, PARK M J, JU H P, et al. Stability and stabilization for discrete-time systems with time-varying delays via augmented Lyapunov-Krasovskii functional[J]. Journal of the Franklin Institute, 2013, 350(3): 521-540.
[14] KIM J H. Note on stability of linear systems with time-varying delay[J]. Automatica, 2011, 47(9): 2118-2121.
[15] TIAN Junkang, XIONG Weijun, XU Fang. Improved delay-partitioning method to stability analysis for neural networks with discrete and distributed time-varying delays[J]. Applied Mathematics & Computation, 2014, 233(3): 152-164.
[16] ZENG Hongbing, HE Yong, WU Min, et al. Complete delay-decomposing approach to asymptotic stability for neural networks with time-varying delays[J]. IEEE Transactions on Neural Networks, 2011, 22(5): 806-812.
[17] CHEN Jie, GU Keqin, KHARITONOV V L. Stability of time-delay systems[M]. Birkh user Boston, 2003, 5(4): 213-217.
user Boston, 2003, 5(4): 213-217.
[18] SEURET A, GOUAISBAUT F. Wirtinger-based integral inequality: application to time-delay systems[J]. Automatica, 2013, 49(9): 2860-2866.
[19] ZENG Hongbing, HE Yong, WU Min, et al. Free-matrix-based integral inequality for stability analysis of systems with time-varying delay[J]. IEEE Transactions on Automatic Control, 2015, 60(10): 2768-2772.
[20] ZENG Hongbing, HE Yong, WU Min, et al. New results on stability analysis for systems with discrete distributed delay[J]. Automatica, 2015, 60: 189-192.
[21] PARK P G, LEE W I, LEE S Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems[J]. Journal of the Franklin Institute, 2015, 352(4): 1378-1396.
[22] SEURET A. A novel stability analysis of linear systems under asynchronous samplings[J]. Automatica, 2012, 48(1): 177-182.
[23] KAO Chungyao. An IQC approach to robust stability of aperiodic sampled-data systems[J]. IEEE Transactions on Automatic Control, 2016, 61(8): 2219-2225.
[24] ZHANG Yijun, YUE Dong, TIAN Engang. New stability criteria of neural networks with interval time-varying delay: a piecewise delay method[J]. Applied Mathematics and Computation, 2009, 208(1): 249-259.
[25] RAKKIYAPPAN R, LATHA V P, ZHU Quanxin. Exponential synchronization of Markovian jumping chaotic neural networks with sampled-data and saturating actuators[J]. Nonlinear Analysis Hybrid Systems, 2017, 24: 28-44.
[26] ZENG Hongbing, PARK J H, SHEN Hao. Robust passivity analysis of neural networks with discrete and distributed delays[J]. Neurocomputing, 2015, 149(PB): 1092-1097.
(编辑 陈灿华)
收稿日期:2018-02-10;修回日期:2018-04-20
基金项目(Foundation item):湖南省自然科学基金资助项目(2018JJ4075);国家自然科学基金资助项目(61672225,61304064) (Project(2018JJ4075) supported by the Natural Science Foundation of Hunan Province; Projects(61672225, 61304064) supported by the National Natural Science Foundation of China)
通信作者:陈刚,博士,副教授,从事时滞系统和鲁棒控制研究;E-mail: drchengang@163.com

