ҙуРНЧФР¶іө·ӯіөұЈ»ӨҪб№№УРПЮФӘ·ЦОц
МЖ»ӘЖҪ1Ј¬АҙјС·е1Ј¬ҪӘУАХэ1Ј¬№щҪріЙ1,2Ј¬БхіҜ·е1
(1. ЦРДПҙуС§ »ъөз№ӨіМС§ФәЈ¬әюДП іӨЙіЈ¬410012Ј»
2. ҙуМЖ»ӘТшОэБЦәЖМШПоДҝІҝЈ¬әюДП іӨЙіЈ¬410001)
ХӘТӘЈәАыУГНЁУГУРПЮФӘИнјюANSYSҪЁБўЧФР¶іө»ъјЬәН°ІЧ°ФЪјЭК»КТЙПөД·ӯіөұЈ»ӨҪб№№(ROPS)өД·ЗПЯРФУРПЮФӘДЈРНЈ¬ФЩАыУГНЁУГПФКҪ¶ҜБҰ·ЦОціМРтLS-DYNAҪшРРЗуҪвәНәуҙҰАнЈ¬И·¶ЁІаПтјУФШөДј«ПЮФШәЙЈ¬ЙијЖІаПтЎўҙ№ПтәНЧЭПт3ёц·ҪПтөДјУФШЗъПЯЈ¬ЗуҪвөГөҪROPSјУФШөДұдРОЗйҝцЎЈҪ«УРПЮФӘ·ЦОцҪб№ыУл№ъјКұкЧјISO 3471:2008ҪшРРұИҪПЈ¬СйЦӨЛщЙијЖјУФШЗъПЯөДәПАнРФЎЈёщҫЭЙијЖөДјУФШЗъПЯҪшРРПЦіЎ·ӯіөұЈ»ӨКФСйЈ¬МбИЎөДКФСйКэҫЭУл·ВХжҪб№ыОЗәПҪПәГЈ¬ЧоҙуПа¶ФОуІоҪцОӘ3.33%Ј¬ЛөГчІЙУГУРПЮФӘ·ВХж·Ҫ·ЁМжҙъПЦіЎКФСй¶ФҙуРНЧФР¶іөјЭК»КТ°ІИ«РФҪшРРЖА№АКЗҝЙРРөДЎЈ
№ШјьҙКЈәҙуРНЧФР¶іөЈ»УРПЮФӘ·ЁЈ»°ІИ«РФЈ»·ӯіөұЈ»ӨҪб№№
ЦРНј·ЦАаәЕЈәTH114 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2013)12-4847-08
Finite element analysis on roll-over protective structure of large dump truck
TANG Huaping1, LAI Jiafeng1, JIANG Yongzheng1, GUO Jincheng1, 2, LIU Zhaofeng1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410012, China;
2. Datang Huayin Program in Xilihaote, Changsha 41001, China)
Abstract: By using ANSYS, nonlinear finite element model of dump truck frame and roll-over protective structure (ROPS) fixed on cab was built, then by making use of LS-DYNA as equation solver and post-processor, maximum load force of lateral loading was determined. Loading curves of lateral, vertical, longitudinal direction were designed and the deformation after loading on ROPS was got. By comparing the result with international standards ISO3471:2008, rationality of the designed loading curves was verified. Corresponding experiment was performed according to curves designed by simulation. Statistics from experiment show good accordance with simulation results, and the biggest relative error is just 3.33%. This approves the feasibility of evaluating safety performance of cab of large dump truck using finite element analysis instead of experiments.
Key words: large dump truck; finite element method; safety performance; roll-over protective structure (ROPS)
УЙУЪ№ӨіМіөБҫ№ӨЧч»·ҫіёҙФУЎўРРК»В·ҝц¶сБУәНі¬ЦШФШФЛРРөИФӯТтЈ¬К№іөЙнХыМеОИ¶ЁРФПВҪөЈ¬ИЭТЧФміЙ·ӯіөКВ№КЎЈөұ№ӨіМіөБҫ·ўЙъ·ӯіөКВ№ККұЈ¬ҫЮҙуөДіе»чФШәЙ»бөјЦВјЭК»КТөДҪб№№өДҙуұдРОЈ¬ЦұҪУОЈј°јЭК»ФұөДИЛЙн°ІИ«ЎЈТтҙЛОӘјхЙЩјЭК»ФұФЪ·ўЙъ·ӯіөКВ№ККұұ»ј·ЙЛөДҝЙДЬРФЈ¬ФЪјЭК»КТҪб№№ЙијЖҪЧ¶ОЈ¬¶Ф°ІЧ°ФЪјЭК»КТЙПөД·ӯіөұЈ»ӨҪб№№ҪшРР°ІИ«РФДЬЖА№АКЗІ»ҝЙЙЩөДЎЈОӘБЛЖА№АROPSөДРФДЬЈ¬№ъНвФЪХв·ҪГжҪшРРБЛҙуБҝөД№ӨЧчЎЈReynoldsөИ[1]ОӘБЛҝјІмЦШРНҝЁіөјЭК»КТөЦҝ№·ӯіөФШәЙөДДЬБҰЈ¬¶ФЖдҪшРРБЛ90Ўг·ӯіөКөСйЈ»KimөИ[2]НЖөјБЛ»щУЪБәөҘФӘАнВЫөДROPSЙијЖјЖЛг·Ҫ·ЁЈ¬МбіцБЛЛЬРФҪВјт»ҜјЖЛг·Ҫ·ЁЈ¬ОӘФзЖЪROPSЙијЖјЖЛгМṩБЛКөУГ№ӨҫЯЎЈGuzzomiөИ[3]НЁ№э¶ФІ»Н¬№ӨҝцПВөДНПАӯ»ъ·ӯіөКВ№КДЈДвЈ¬ХТөҪБЛ»ъЖчЦКБҝУлДЬБҝЦ®јдөД·ЗПЯРФ№ШПөЎЈAlfaroөИ[4]МбіцУГУРПЮФӘ·Ҫ·ЁјЖЛгЧоҙуІОҝј»ъЖчЦКБҝөД·Ҫ·ЁЈ¬ІўНЁ№э¶Ф4ёцІ»Н¬РНәЕНПАӯ»ъ·ӯіөұЈ»ӨҪб№№ҪшРРКФСйЈ¬СйЦӨБЛёГ·Ҫ·ЁөДҝЙРРРФЎЈHarrisөИ[5]МбіцФЪ·ӯіөұЈ»ӨҪб№№ЙијЖЗ°ЖЪЈ¬АыУГУРПЮФӘКЦ¶О¶ФЖдРФДЬҪшРРФӨІвөД·Ҫ·ЁЈ¬Іў¶ФFord-3000РНәЕіөБҫөД·ӯіөұЈ»ӨҪб№№ҪшРРБЛКФСйСйЦӨЈ¬ёГКФСйЦҙРРөДұкЧјОӘSAE J2194ЎЈ№ъДЪ¶ФROPSөДСРҫҝЖрІҪҪПНнЈ¬СоБҰ·төИ[6]¶ФZL40AЧ°ФШ»ъROPSЧчБЛАнВЫСРҫҝІўҪшРРБЛ·ӯіөКФСйЈ¬КФСй»ъРН»ъЖчЦКБҝОӘ13.3 tЈ¬ЦҙРРұкЧјОӘISO3471-1986ЎЈ№ұҝӯҫьөИ[7]¶ФХы»ъЦКБҝОӘ27tөДCXZL80SЧ°ФШ»ъROPSҪшРРАнВЫәНКФСйЈ¬өГөҪБЛБҪЦщROPSФЪөҜРФұдРОәНЛЬРФұдРОҪЧ¶ОөДО»ТЖјЖЛг·Ҫ·ЁЎЈНхјМРВ[8]МбіцБЛ№ӨіМіөБҫ·ӯіөұЈ»ӨҪб№№јЖЛг»ъ·ВХж·Ҫ·ЁәНОьДЬҝШЦЖөДЙијЖ·Ҫ·ЁЈ¬ІўЗТМбіцТФІаПтОьДЬВъЧг№ъјКұкЧјТӘЗуКұҝМөДІаПтБҰУлұкЧј№ж¶ЁөДЧоРЎІаПтіРФШБҰЦ®ІоЧоРЎЧчОӘДҝұкәҜКэЈ¬ІЙУГТЕҙ«Лг·Ё¶Ф·ӯіөұЈ»ӨҪб№№ҪшРРИ«ҫЦУЕ»ҜЙијЖЎЈЛҫҝЎөВ[9]ІЙУГҝЙКУ»ҜјЖЛг»ъДЈДвәНОпАнСщ»ъКФСй·Ҫ·ЁЈ¬¶Ф·ӯіөәуИЛМеөДЛрЙЛіМ¶ИҪшРРФӨІвәНЖА№АЈ¬МбіцБЛУЙ»әіеОьДЬФӘјюәНҪрКфҝтјЬҪб№№ЧйіЙөДРВРН·ӯіөұЈ»ӨҪб№№ёЕДоЎЈУлЗ°ИЛСРҫҝөДРЎ¶ЦО»іөБҫІ»Н¬Ј¬ұҫОДЧчХЯТФЦКБҝҙп300 tөДҙуРНҝуУГЧФР¶іөөДROPSҪб№№ОӘСРҫҝ¶ФПуЈ¬ҝјВЗЧФР¶іө»ъјЬЎўБ¬РшјУФШәНұдРО»ШөҜөИТтЛШЈ¬ҪЁБў·ЗПЯРФУРПЮФӘДЈРНЈ¬ІўҪшРРПФКҪ¶ҜБҰ·ЦОцЈ¬ёщҫЭ·ЦОцҪб№ыЙијЖёчёц·ҪПтөДјУФШЗъПЯЈ¬»сИЎёчЦЦФШәЙПВОьКХДЬБҝ»тХЯұдРОЗйҝцЈ¬Іў·ЦОцЖдКЗ·сҙпөҪ№ъјКұкЧјISO 3471:2008(ТФПВјтіЖ№ъјКұкЧј)№ж¶ЁөДТӘЗуЎЈ
1 јУФШКФСй¶ФROPSөДРФДЬТӘЗу
ёщҫЭПЦРР№ъјКұкЧјISO3471:2008Ј¬ҪбәПROPSөДҪб№№МШөгЈ¬өГіцјУФШКФСй¶ФROPSөДТӘЗуЦчТӘУР4ПоЈ¬јҙЧоРЎІаПтіРФШДЬБҰЎўЧоРЎДЬБҝОьКХДЬБҰЎўЧоРЎҙ№ПтіРФШДЬБҰәНЧоРЎЧЭПтіРФШДЬБҰЎЈ
1.1 ROPSөДЧоРЎІаПтіРФШДЬБҰРФДЬТӘЗу
ROPSөДЧоРЎІаПтіРФШДЬБҰКЗТӘЗуROPSҫЯУРТ»¶ЁөДІаПтЗҝ¶И¶шҙ©ИлОҙ¶іНБИАЈ¬К№ROPSДЬЖрөҪЧиЦ№іөБҫҪшТ»ІҪ·ӯ№цөДЧчУГ[5]ЎЈФЪҪшРРІаПтіРФШДЬБҰКөСйКТКФСйКұЈ¬јУФШөДЛЩ¶ИУҰёГИПОӘКЗҫІМ¬өДЛЩ¶И(јҙФЪФШәЙК©јУөг№№јюұдРОЛЩ¶ИІ»ҙуУЪ5 mm/s)Ј¬ЗТТФјУФШЦРРДО»ТЖФцБҝЎЬ15 mm/sОӘјдёфЈ¬јЗВјБҰәНјУФШЦРРДөДО»ТЖБҝЈ¬Аҙ»жЦЖБҰ-О»ТЖЗъПЯЎЈ
ФЪКөСйКТҫІМ¬КФСйКұЈ¬ОӘБЛДЈДвіөБҫКөјКЗгө№КұУлөШГжөДПа¶Ф№ШПөЈ¬№ъјКұкЧјТэИлБЛІаПтДЈДвөШЖҪГж(Lateral simulate group planeЈ¬јтіЖLSGP)өДёЕДоЈ¬LSGPөДИ·¶Ё·Ҫ·ЁИзНј1ЛщКҫЈ¬НјЦРAОӘІаПтФШәЙЧчУГөДROPSЙПІҝ№№јюЈ»bОӘҙУ№№јюAөД¶ЛІҝҝҙИҘЧоНвөДөгЈ»cОӘНЁ№эөгbөДҙ№ЦұПЯЈ»dОӘЖҪРРУЪ»ъЖчЧЭПтЦРРДПЯЈ¬ЗТНЁ№эПЯcөДҙ№ЦұЖҪГжЎЈФЪROPSөДұдРО№эіМЦРЈ¬LSGPУҰЛжіРФШ№№јюөДТЖ¶Ҝ¶шТЖ¶ҜЈ¬ө«ұШРлұЈіЦУлҙ№ЦұЖҪГжіЙ15ЎгҪЗЎЈ
ЕР¶ПROPSКЗ·сВъЧгЧоРЎІаПтіРФШДЬБҰөДұкЧјКЗЈәФЪВъЧг№ъјКұкЧј№ж¶ЁөДФШәЙҙуРЎөДЗ°МбПВЈ¬КФСйЦРұдРОөДROPSәНІаПтДЈДвөШЖҪГжLSGP¶јІ»өГҪшИлDLVЎЈ
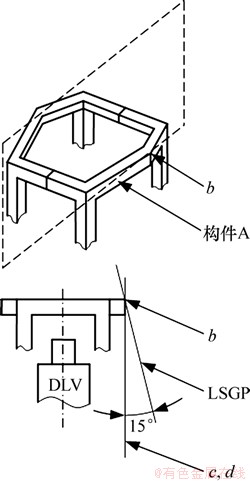
Нј1 LSGPөДИ·¶Ё
Fig. 1 Determination of LSGP
1.2 ROPSөДЧоРЎДЬБҝОьКХДЬБҰТӘЗу
ЧоРЎДЬБҝОьКХДЬБҰТӘЗуЦчТӘКЗҝјВЗіөБҫ№ц·ӯәуROPSУРіРКЬБ¬Ршіе»чөДДЬБҰ[10]ЎЈROPSДЬБҝОьКХДЬБҰКЗУГROPSФЪІаПтјУФШКФСйЦРЈ¬ІаПтФШәЙФЪХыёцјУФШ№эіМЦРЛщЧчөД№ҰАҙәвБҝөДЈ¬јЖЛгДЬБҝөД·Ҫ·ЁИзНј2ЛщКҫЎЈROPSөДДЬБҝОьКХДЬБҰҝЙёщҫЭПВКҪјЖЛгЈә
 (1)
(1)
КҪЦРЈәUОӘДЬБҝЈ¬JЈ»ЎчiОӘөЪiёцФШәЙЛ®ЖҪөДұдРОҙуРЎЈ¬mmЈ»FiОӘөЪiёцФШәЙЛ®ЖҪөДФШәЙЈ¬NЈ»NОӘјУФШЛ®ЖҪЧЬКэЎЈ
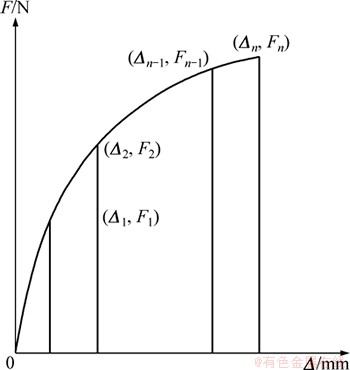
Нј2 јУФШКөСйөДО»ТЖ-БҰЗъПЯ
Fig. 2 Curves of displacement-force of loading experiments
ЧоРЎДЬБҝОьКХДЬБҰКөСйКТКФСйөДҫЯМе№ж¶ЁУлЧоРЎІаПтіРФШДЬБҰПаН¬ЎЈТ»°гЗйҝцПВЈ¬ФЪROPSөДІаПтјУФШКФСйЦРЈ¬ДЬБҝОьКХәНІаПтіРФШДЬБҰұкЧјІ»ҝЙДЬФЪКФСйҪшРРөДН¬Т»КұҝМөҪҙпЈ¬ХвКұУҰБ¬РшјУФШөҪROPSБҰәНДЬБҝОьКХ¶јВъЧгТӘЗуОӘЦ№ЎЈ
1.3 ROPSөДЧоРЎҙ№ПтіРФШДЬБҰРФДЬТӘЗу
ТӘЗуROPSУРТ»¶ЁөДҙ№ЦұіРФШДЬБҰөДДҝөДФЪУЪөұіөБҫ№ц·ӯәуЈ¬ұдРОөДROPSДЬЦ§іЕЧЎХыёцөЯёІөДіөБҫЈ¬ұЬГвЛҫ»ъФюЙЛ[10]ЎЈФЪҪшРРҙ№ПтіРФШДЬБҰКөСйКТКФСйКұЈ¬јУФШөДЛЩ¶ИУҰёГИПОӘКЗҫІМ¬өДЛЩ¶ИЈ¬ЗТјУФШөҪ№ъјКұкЧј№ж¶ЁФШәЙөДКұәтЈ¬ROPSҪб№№Ц§іРХвСщөДФШәЙ5 min»төҪНЈЦ№ұдРООӘЦ№Ј¬ИЎҪП¶МХЯЎЈ
ЕР¶ПROPSКЗ·сВъЧгЧоРЎҙ№ПтіРФШДЬБҰөДұкЧјКЗЈәФЪВъЧг№ъјКұкЧј№ж¶ЁөДФШәЙҙуРЎөДЗ°МбПВЈ¬КФСйЦРұдРОөДROPSІ»өГҪшИлDLVЎЈ
1.4 ROPSөДЧоРЎЧЭПтіРФШДЬБҰРФДЬТӘЗу
ЧЭПтіРФШДЬБҰТӘЗуКЗОӘБЛұЈЦӨөұіөБҫәбПт№ц·ӯКұROPSДЬҙ©ИлОҙ¶іНБИА¶ш·АЦ№іөБҫҪшТ»ІҪ№ц·ӯ[10]ЎЈФЪҪшРРҙ№ПтіРФШДЬБҰКөСйКТКФСйКұЈ¬јУФШөДЛЩ¶ИУҰёГИПОӘКЗҫІМ¬өДЛЩ¶ИЈ¬ФШәЙУҰіЦРшөҪВъЧгЧЭПтјУФШТӘЗуОӘЦ№ЎЈ
ЕР¶ПROPSКЗ·сВъЧгЧоРЎЧЭПтіРФШДЬБҰөДұкЧјКЗЈәФЪВъЧг№ъјКұкЧј№ж¶ЁөДФШәЙҙуРЎөДЗ°МбПВЈ¬КФСйЦРұдРОөДROPSІ»өГҪшИлDLVЎЈ
2 УРПЮФӘДЈРНөДҪЁБў
2.1 јёәОДЈРНөДҙҙҪЁ
2.1.1 ФШәЙ·ЦЕдЖчLDD(Load distribution device)И·¶Ё
LDDКЗУГАҙ·АЦ№ROPS№№јюФЪФШәЙЧчУГөгҫЦІҝҙ©ИлөДЧ°ЦГЈ¬ёщҫЭ№ъјКұкЧј№ж¶ЁЈ¬Лҫ»ъЧщТОЖ«Ал»ъЖчЦРРДПЯКұЈ¬ІаПтФШәЙУҰјУФШҝҝҪьЧщТОІаПтҪб№№јюөДНвұЯЈ»ҙ№ПтФШәЙЦРРДУҰјУФШН¬Т»ёцҙ№ЦұГжЈ¬ёГЖҪГжҙ№ЦұУЪROPS№№јюөДЧЭПтЦРРДПЯЈ¬ФЪІаПтјУФШұдРОЗ°УЪҪб№№ЙПИ·¶ЁЈ»ЧЭПтФШәЙУҰСШROPSөДЧЭПтЦРРДПЯЈ¬ЧчУГФЪROPSөДЙПІҝ№№јюЙПЎЈУЙҙЛИ·¶ЁLDDәНROPSөДО»ЦГИзНј3ЛщКҫЎЈ
Нј3 LDDО»ЦГ
Fig. 3 Position of LDD
2.1.2 ДУЗъј«ПЮБҝDLV(Deflection-limiting volume)И·¶Ё
ОӘБЛК№·ВХжДЈРНёьМщҪьКөјКЗйҝцЈ¬ФЪЧЬДЈРНЦРФцјУБЛЛҫ»ъәНёұјЭК»өД·ВХжДЈРНЎЈDLVҫНКЗТ»ёцёЯҙуЎўҙ©ЧЕЖХНЁТВ·юЎўҙч°ІИ«ГұЎўЧшЧЛДРРФөДҙ№ЦұН¶У°ҪьКУЦөЎЈёщҫЭ№ъјКұкЧјISO 3164Ј¬И·¶ЁDLVНвРОіЯҙзЎЈ
¶ФDLVҪшРР¶ЁО»КұЈ¬КЧПИұШРлҪ«ЧщО»өчөҪЧоәуәНЧоөНО»ЦГЈ¬И»әуёщҫЭ№ъјКұкЧјISO 5353Ј¬УГөЧЧщЙПГжөДЛ®ЖҪЦРПЯәНҝҝұіЗ°ГжөДҙ№ЦұЦРПЯөДҪ»өгЧчОӘ DLV өД¶ЁО»өгSIP(Seat index point)Ј¬НЁ№эSIPЗТҙ№ЦұУЪЛҫ»ъЧщЧЭПтЖҪГжөДПЯЧчОӘDLVөД¶ЁО»ЦбПЯLA(Locating axis)[11]ЎЈФЪИ·¶ЁБЛ DLV өД¶ЁО»өгSIPәН¶ЁО»ЦбПЯLAәуЈ¬јҙҝЙ¶ФDLVҪшРР¶ЁО»ЎЈDLV¶ЁО»әуЈ¬ROPSҪб№№ДЪІаУлDLVөДПа¶ФО»ЦГ№ШПөИзНј4ЛщКҫЎЈёщҫЭROPSјУФШО»ЦГЈ¬УЙНј4ҝЙЦӘЈәROPSІаПтҝЙұдҫаАлОӘ176 mmЈ¬ROPSҙ№ПтҝЙұдҫаАлОӘ125 mmЈ¬ROPSЧЭПтҝЙұдҫаАлОӘ407 mmЎЈ
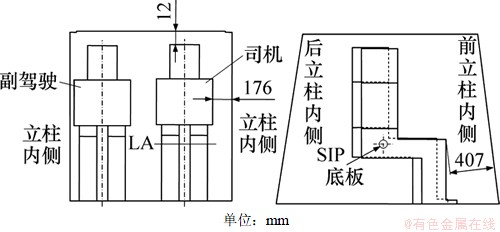
Нј4 ROPSҪб№№ДЪІаУлDLVПа¶ФО»ЦГ
Fig. 4 Relative position of inner side of ROPS structure and DLV
2.1.3 јёәОДЈРНөДҙҙҪЁ
УЙУЪёГЧФР¶іө·ӯіөұЈ»ӨҪб№№өДёҙФУРФЈ¬ФЪSolidWorksЖҪМЁПВҪЁБўБЛЧФР¶іө»ъјЬәНROPSөДИэО¬ДЈРНЎЈОӘБЛјхРЎУРПЮФӘДЈРНөДјЖЛг№жДЈЈ¬¶ФУЪәс¶ИПа¶ФЖдіӨ¶ИәНҝн¶ИәЬРЎөД°е¶јІЙУГійИЎЦРГжөД·ҪКҪ»ӯіЙГжҪб№№Ј¬УЙУЪDLVЦ»КЗОӘБЛДЈДвИЛөДО»ЦГЈ¬ОӘБЛјхЙЩDLV¶ФROPSёХ¶ИәНЗҝ¶ИөДУ°ПмЈ¬ёщҫЭDLVНвРОіЯҙзҪ«Жд»®іЙГжҪб№№Ј¬¶ФУЪ3ёц·ҪПтіЯҙзПаҪьөДҪб№№ЦұҪУ»ӯіЙМеҪб№№Ј¬И»әу·ЦұрөјИлANSYSЦРҪшРРұШТӘөДІј¶ыФЛЛгЎЈ¶ФУЪҪб№№ЦРКөјКБ¬ҪУУРВЭЛЁБӘҪУөДІҝ·ЦЈ¬ЦұҪУјт»ҜҙҰАнОӘХіҪУФЪТ»ЖрЎЈ
2.2 өҘФӘАаРНәНКөіЈКэЙиЦГ
ГжҪб№№ІЙУГ»щУЪKirchhoffјЩ¶ЁөД°еҝЗөҘФӘSHELL163ДЈДвЈ¬ФЪКөІОКэЦРЙиЦГЖдјфЗРТтКэЎў»э·ЦөгКэЦөәНәс¶ИөИІОКэЈ¬ОӘБЛјхЙЩDLV¶ФROPSёХ¶ИәНЗҝ¶ИөДУ°ПмЈ¬Ҫ«DLV¶ФУҰГжҪб№№өДКөіЈКэәс¶ИЙиОӘәЬРЎЈ»МеҪб№№ІЙУГ8ҪЪөгИэО¬КөМеөҘФӘSOLID164ДЈДвЎЈ
2.3 ІДБПДЈРН¶ЁТе
УЙУЪёГКөСйТӘҝјВЗҪб№№өДҙуұдРООьДЬЈ¬№КЧФР¶іө»ъјЬәНROPSІДБПДЈРНЙиЦГОӘөҜЛЬРФІДБПЈ¬КдИлЛщСЎУГІДБПөДёХ¶ИЎўІҙЛЙұИәНЗь·юј«ПЮЈ¬УЙУЪұҫДЈРНІЙУГАнПлөҜЛЬРФјЩЙиЈ¬ТтҙЛЗРПЯДЈБҝОӘБгЎЈёщҫЭЛщЙијЖКФСйМЁјЬЦРЧФР¶іө»ъјЬФјКшөДІҝО»Ј¬Ҫ«ҙуБъГЕБәөЧІҝәН»ъјЬОІІҝБҪІаЙиЦГОӘёХРФМеІДБПЈ¬КдИлЛщСЎУГІДБПөДёХ¶ИЎўІҙЛЙұИЈ¬ФјКшЛщУРЖҪ¶ҜәНЧӘ¶ҜЧФУЙ¶ИЎЈОӘұЬГвјУФШ№эіМЦРLDDҪб№№ұдРОУ°ПмROPSҪб№№өДёХ¶ИЈ¬¶ФLDDЙиЦГІДБПДЈРНЧӘ»»Ј¬ФЪјУФШЖЪјдLDDОӘёХРФІДБПДЈРНЈ¬ФЪ·ЗјУФШЖЪјдLDDОӘёХ¶ИәЬРЎөДөҜРФІДБПДЈРН[12]ЎЈ
2.4 Ншёс»®·Ц
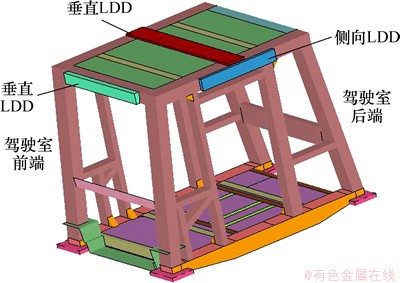
ЙиЦГөҘФӘАаРНЈ¬ёщҫЭКөјКҪб№№ЦР°еәсёшјт»ҜөДГжҪб№№ёіУиПаУҰәс¶ИөДКөіЈКэЈ¬МеҪб№№І»УГЙиЦГКөіЈКэЈ¬¶ЁТеПаУҰөДІДБПДЈРНЈ¬ЙиЦГККөұөДНшёсіЯҙзҙуРЎЈ¬¶ФДЈРНҪшРРНшёс»®·ЦЈ¬№ІөГөҪ93 905ёцөҘФӘЈ¬86 028ёцҪЪөгЈ¬өГөҪУРПЮФӘНшёсИзНј5ЛщКҫЎЈ
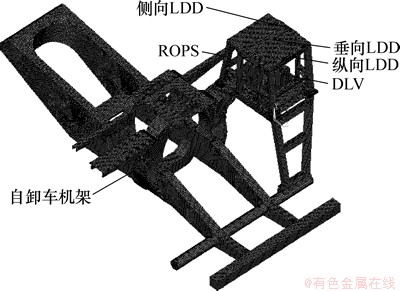
Нј5 ЧФР¶іө»ъјЬәНROPSөДУРПЮФӘНшёс
Fig. 5 FEA model of frame and ROPS of dump truck
2.5 К©јУФШәЙ
ёщҫЭКөСйјУФШіМРтөДТ»°гТӘЗуЈ¬јУФШЛіРтОӘІаПтЎўҙ№ПтЎўИ»әуЧЭПтЎЈёГЧФР¶іөөДЦКБҝОӘ145 tЈ¬ёщҫЭ№ъјКұкЧј¶ФROPSРФДЬөДТӘЗуЈ¬И·¶ЁЛщРиТӘК©јУөДІаПтЎўҙ№ПтәНЧЭПтФШәЙөДБҰәНДЬБҝКэҫЭИзұн1ЛщКҫЎЈ
ұн1 БҰәНДЬБҝКэҫЭ
Table 1 Force and energy data

2.5.1 ІаПтј«ПЮФШәЙИ·¶Ё
К©јУІаПтФШәЙКұЈ¬І»ҪцТӘЗуROPSҪб№№јюҫЯУРЧг№»өДІаПтёХ¶ИК№ROPSФЪіРКЬІаПтБҰФШәЙөДЗ°МбПВЈ¬ROPSұдРОІ»ФКРнЖдИОәОІҝ·ЦЗЦИлDLVЈ¬ЗТТӘЗуROPSҪб№№јюҫЯУРЧг№»өДЛЬРФұдРОК№ROPSФЪІаПтјУФШКФСйЦРЈ¬ІаПтФШәЙФЪХыёцјУФШ№эіМЦРЛщЧцөД№ҰҙпөҪЧоРЎДЬБҝОьКХДЬБҰТӘЗуЎЈ№ъјКұкЧј№ж¶ЁЈ¬ФЪІаПтјУФШКұЈ¬БҰәНДЬБҝТӘЗуҝЙІ»Н¬КұҙпөҪЈ¬јҙФЪДіТ»ёцҙпөҪТӘЗуЗ°Ј¬БнТ»ёцҝЙТФі¬№э№ж¶ЁЦөЈ¬ТтҙЛұШРлПИИ·¶ЁІаПтј«ПЮФШәЙЎЈ
УЙУЪ№ъјКұкЧјТӘЗуІаПтјУФШКұұдРОөДЛЩ¶ИИПОӘјУФШКЗҫІМ¬өДЈ¬ұҫОДНЁ№эёшLDDК©јУІ»ҙуУЪ5 mm/sөДІаПтО»ТЖФШәЙЈ¬ОӘБЛКдіцДЈРНөДНвБҰ№ҰәНLDDЙПөД·ҙБҰЈ¬ФЪKОДјюАпГжМнјУКдіцҪЪөгБҰПа№Ш№ШјьЧЦЈ¬НЁ№эLS-DYNAҪшРРЗуҪвЈ¬өГөҪБЛёчёцКұјдөгДЈРНөДНвБҰ№ҰәНLDDЙПЛщУРҪЪөгөД·ҙБҰЈ¬И»әуАыУГMATLABИнјюҪшРРКэҫЭҙҰАнөГөҪДЈРНөДНвБҰ№ҰУлІаПтФШәЙөДұд»ҜЗъПЯИзНј6ЛщКҫЎЈ
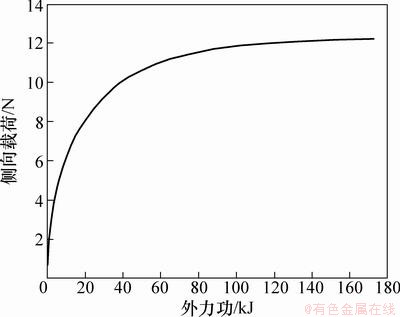
Нј6 НвБҰ№Ұ-ІаПтФШәЙЗъПЯ
Fig. 6 Curves of external work-lateral load
УЙНј6ҝЙЦӘЈәК©јУО»ТЖФШәЙөД№эіМЦРЈ¬ІаПтФШәЙҝӘКјЦрҪҘФцҙуәуАҙЦрҪҘЗчПтЧоҙуЦөЎЈөұНвБҰ№ҰҙпөҪ№ъјКұкЧј№ж¶ЁТӘЗу(172.718 kJ)КұЈ¬ІаПтј«ПЮФШәЙОӘ1 223 kNЈ¬ТСҫӯі¬№эБЛ№ъјКұкЧј№ж¶ЁЦөЎЈ
2.5.2 јУФШЗъПЯЙијЖ
ёщҫЭКөјКјУФШКФСй·Ҫ°ёЈ¬јУФШЗъПЯ°ьАЁјУФШ¶ОЎўәгФШ¶ОЎўР¶ФШ¶ОәН»ШөҜ¶ОЈ¬јУФШ¶ОФШәЙЦрҪҘЙПЙэөДЈ¬ҝЙТФјхЙЩјУФШ№эіМЦРөДіе»чФШәЙЈ¬ұҫОДОӘБЛЛх¶МЗуҪвКұјдЈ¬іхІҪЙијЖФШәЙҪПөНКұЙПЙэ·щ¶ИұИҪПҝмЈ¬ФШәЙҝмҙпөҪЧоҙуЦөКұЙПЙэ·щ¶ИПа¶ФВэР©Ј¬И»әуёщҫЭ№ъјКұкЧјПЮ¶ЁөДҫІМ¬ұдРОЛЩ¶И5 mm/sЈ¬ККөұөчХыФШәЙЙПЙэөД·щ¶ИЈ¬ЦұөҪROPSөДұдРОЛЩ¶ИҙпөҪ№ъјКұкЧј№ж¶ЁөДТӘЗуОӘЦ№Ј»әгФШ¶ОФШәЙОИ¶ЁФЪЧоҙуФШәЙЈ¬ЧоҙуФШәЙіЦРшөҪДЬБҝҙпөҪТӘЗу»тХЯROPSөДұдРОҙпөҪОИ¶ЁәуҪбКшЈ»Р¶ФШ¶ОФШәЙЦрҪҘПВҪөЈ¬ҝЙТФјхЙЩР¶ФШ№эіМЦРROPSұдРО»ШөҜІъЙъөДіе»чФШәЙЈ¬ФШәЙПВҪөөД·щ¶ИН¬Сщ°ҙХХ№ъјКұкЧјПЮ¶ЁөДұдРОЛЩ¶ИТӘЗуККөұөчХыЈ¬ЦұөҪROPSөДұдРОЛЩ¶ИҙпөҪ№ъјКұкЧј№ж¶ЁөДТӘЗуОӘЦ№Ј»»ШөҜ¶ОФШәЙОӘБгЈ¬ДҝөДКЗИГROPSНкИ«»ШөҜЦұөҪұдРО»щұҫҪбКшЎЈТ»ёц·ҪПтөДјУФШҪбКшЦ®әуФЩ°ҙН¬СщөД·Ҫ·ЁК©јУПВТ»ёц·ҪПтөДФШәЙЎЈұҫОДОӘБЛЛх¶МЗуҪвКұјдЈ¬ФЪІ»У°ПмјЖЛгҪб№ыөДЗ°МбПВККөұЛх¶МБЛёчёцФШәЙ¶ОөДјУФШКұјдІўНЁ№э¶аҙОКФЛгөГіцЧоЦХјУФШЗъПЯИзНј7ЛщКҫЎЈ
ЧцНкТФЙПЗ°ҙҰАн№ӨЧчЦ®әуЈ¬ҪшРРДЬБҝСЎПоЎўЙіВ©ҝШЦЖЎўЗуҪвКұјдәНКұјдІҪіӨөИЗуҪвІОКэөДЙиЦГЈ¬ЙъіЙKОДјюЈ¬ЧоәуУГLS-DYNAЗуҪвЖчҪшРР·ВХжјЖЛгЎЈ
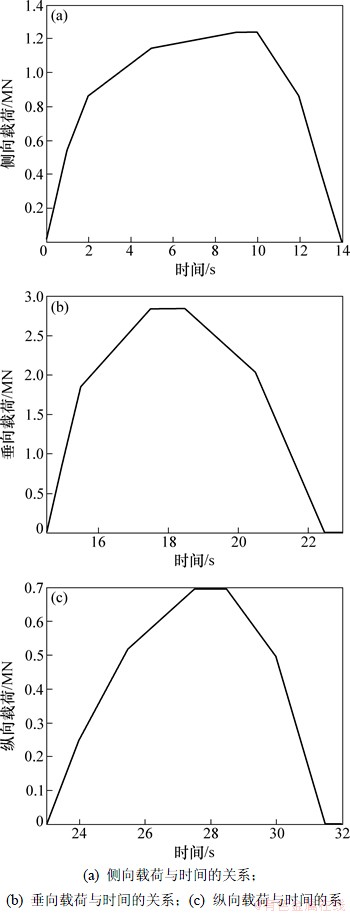
Нј7 јУФШЗъПЯ
Fig. 7 Loading curves
3 КэЦөДЈДвј°·ЦОц
НЁ№эLS-DYNAЗуҪвЈ¬өГөҪІаПтјУФШ№эіМЦРНвБҰ№ҰЛжКұјдөДұд»ҜЗъПЯИзНј8ЛщКҫЈ¬ІаПтЎўҙ№ПтәНЧЭПт3ёц·ҪПтјУФШ№эіМЦРLDDөДұдРОЛЩ¶ИЛжКұјдөДұд»ҜЗъПЯИзНј9ЛщКҫЈ»ROPSҪб№№ДЪІаУлDLVҫаАлЧоҪьКұҝМөДО»ЦГИзНј10ЛщКҫЎЈ
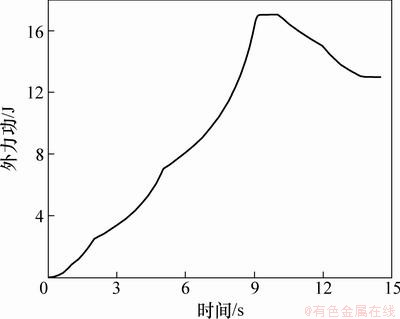
Нј8 ІаПтјУФШ№эіМЦРНвБҰ№Ұ-КұјдЗъПЯ
Fig. 8 Enteral work-time curve in lateral loading process
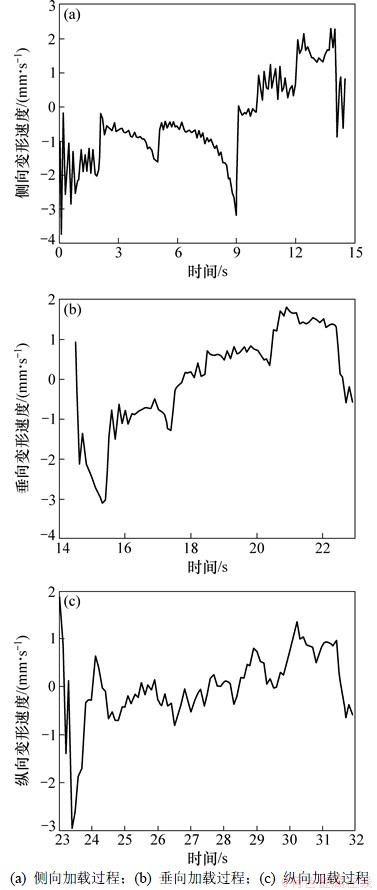
Нј9 LDDөДұдРОЛЩ¶И-КұјдЗъПЯ
Fig. 9 Deform speed-time curves of LDD
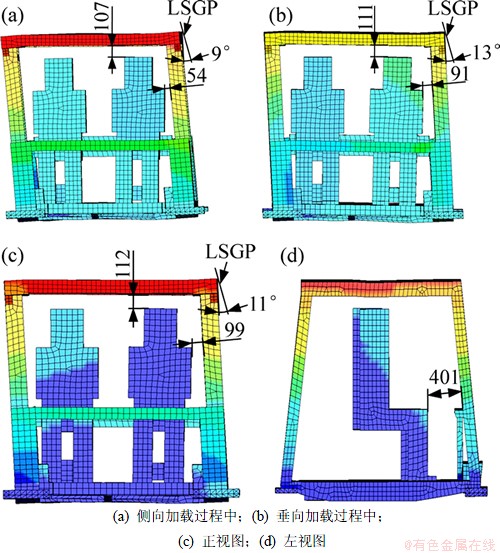
Нј10 ROPSҪб№№ДЪІаУлDLV ҫаАлЧоҪьКұҝМөДО»ЦГ
Fig. 10 Position of nearest distance from inner side of ROPS structure to DLV
УЙНј8ҝЙЦӘЈәёщҫЭЛщЗуөГөДІаПтј«ПЮФШәЙјУФШЈ¬ІаПтјУФШҙпөҪОИ¶ЁКұЈ¬ІаПтОьДЬҙпөҪ№ъјКұкЧј№ж¶ЁөДТӘЗуЈ¬ұнГчЛщЗуІаПтј«ПЮФШәЙКЗәПАнөДЈ»УЙНј9ҝЙЦӘЈә°ҙХХұҫОДЙијЖөДјУФШЗъПЯјУФШЈ¬ІаПтЎўҙ№ПтәНЧЭПт3ёц·ҪПтјУФШөДұдРОЛЩ¶ИҫщІ»ҙуУЪ5 mm/sЈ¬ҙпөҪ№ъјКұкЧј№ж¶ЁөДТӘЗуЈ¬ЛөГчёГјУФШЗъПЯөДЙијЖКЗҝЙРРөДЈ»УЙНј10ҝЙЦӘЈәФЪІаПтЎўҙ№ПтәНЧЭПтјУФШҪшРРЖЪјдЈ¬ROPSәНІаПтДЈДвөШЖҪГжLSGPГ»УРИОәОІҝ·ЦҪшИлDLVЈ¬ФЪІаПтјУФШЖЪјдЈ¬ІаПтәНҙ№ПтҝЙұдҫаАлҙпөҪЧоРЎЈ¬ЧоРЎІаПтҝЙұдҫаАлОӘ54 mmЎўЧоРЎҙ№ПтҝЙұдҫаАлОӘ107 mmЈ¬ФЪЧЭПтјУФШЖЪјдЈ¬ЧЭПтҝЙұдҫаАлҙпөҪЧоРЎЈ¬ЧоРЎЧЭПтҝЙұдҫаАлОӘ401 mmЈ¬ВъЧг№ъјКұкЧј№ж¶ЁөДТӘЗуЎЈ
4 КФСйСРҫҝ
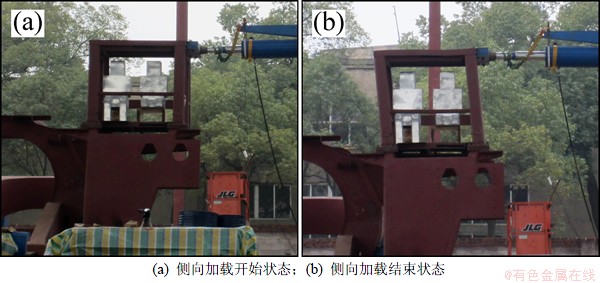
ROPSөД°ІИ«РФДЬЖАјЫКФСйКЗУГҫІФШҙъМж¶ҜФШЈ¬ёщҫЭ»ъЖчЦКБҝөДҙуРЎЈ¬ФЪ·ӯіөұЈ»ӨҪб№№ЙПІҝТАҙОК©јУ№ж¶ЁҙуРЎөДЛ®ЖҪІаПтЎўҙ№Цұ·ҪПтәНЛ®ЖҪЧЭПтФШәЙЈ¬ТФҝјәЛЖдЗҝ¶ИәНёХ¶ИЈ¬УГУЪСйЦӨROPSҝЙҝҝРФөДКФСйУР2ЦЦКФСйАаРНЈәТ»ЦЦКЗХы»ъПЦіЎКФСйЈ»Т»ЦЦКЗФЪКФСйМЁЙП¶ФROPSҪшРРЖАјЫКФСйЎЈДҝЗ°Ј¬·ӯіөұЈ»ӨҪб№№өДЖАјЫКФСйЦчТӘКЗФЪКөСйКТөДКФСйМЁЙПҪшРРЎЈКөСйКТКФСйКұІ»РиТӘУГХыМЁ»ъЖчЈ¬Ц»РиТӘ°С·ӯіөұЈ»ӨҪб№№әНУлЖдПаБ¬ҪУөДіөјЬ№М¶ЁФЪКФСйМЁЙПЈ¬ҫНҝЙТФҪшРРКФСйЎЈНј11ЛщКҫОӘІаПтјУФШКФСйЙиұёЎЈұҫКФСй¶ФПуОӘДіРНәЕҝуУГЧФР¶іөјЭК»КТәНЖдБ¬ҪУөДіөјЬЎЈКФСйЦҙРР№ъјКұкЧјISO 3471-2008ЎЈ

Нј11 ІаПтјУФШКФСйЙиұё
Fig. 11 Lateral loading experiment equipment
јУФШЙиұёИзНј11ЛщКҫЈ¬°ьАЁТәС№ёЧЎўТәС№ХҫЎўјУФШБәЎўФШәЙ·ЦЕдЖчЎўјУФШіРОСәНДў№ҪН·ЎЈјУФШБәКЗУГАҙК©јУФШәЙөДТ»ёщәбБәЈ¬әбБәБҪ¶ЛУРПъҝЧЦ§ЧщЈ¬ТәС№ёЧНЁ№эПъҪшРРБӘҪУЎЈјУФШіРОСәНДў№ҪН·КЗУГАҙ·АЦ№јУФШ№эіМЦРУЙУЪјЭК»КТұдРОІъЙъЖ«ФШөјЦВТәС№ёЧУлФШәЙ·ЦЕдЖчНСАлөДЧ°ЦГЎЈјУФШ№эіМЦРјУФШіРОСУлДў№ҪН·РОіЙЗтҪВЈ¬ҝЙіРКЬТ»¶ЁөДЖ«ФШЈ¬ЧгТФұЈЦӨјУФШ№эіМЦРјУФШіРОСУлДў№ҪН·І»»бНСАлЎЈјУФШіРОСәёҪУФЪФШәЙ·ЦЕдЖчЙПЈ¬Дў№ҪН·°ІЧ°ФЪёәәЙҙ«ёРЖчЙПГжЎЈ
°ІЧ°ІўјмІйНкКФСйЙиұёЦ®әуҝӘКјҪшРРКФСйЈ¬Жф¶ҜҝШЦЖМЁҪшРРјУФШЈ¬ёщҫЭҙ«ёРЖчКдіцКэҫЭҝШЦЖјУФШЛЩ¶ИЈ¬Н¬Кұ№ЫІмКУЖөКдіцЈ¬өұФШәЙТӘЗуәНДЬБҝТӘЗуҫщҙпөҪөДКұәтНЈЦ№јУФШЈ¬іЦРшФШәЙЦБұдРОНЈЦ№Ј¬И»әуҝӘКјР¶ФШЈ¬НЈЦ№ҝШЦЖМЁЎЈНј12ЛщКҫОӘКФСйҪбКшәуХыёцјЭК»КТ·ўЙъөДЛЬРФұдРОЗйҝцЎЈ
Нј13ЛщКҫОӘ·ВХжУлКФСйІаПтјУФШҪб№ыұИҪПЎЈУЙНј13ҝЙЦӘЈә·ВХжөГөҪөДјЭК»КТІаПтјУФШҪбКшЧҙМ¬УлКФСй»щұҫТ»ЦВЈ¬ЙПәбБәәНПВәбБәБҪ¶ЛІъЙъЛЬРФҪВЈ¬ұдРОДЈКҪПаН¬Ј¬ЗТROPS№№јюОҙЗЦИлDLVЎЈ
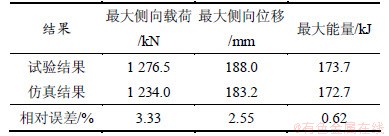
КФСйІвөГөДІаПтФШәЙәНДЬБҝЛжІаПтО»ТЖұд»ҜЗъПЯУл·ВХжөДІаПтФШәЙЛжІаПтО»ТЖұд»ҜЗъПЯ¶ФұИИзНј14ЛщКҫЎЈКФСйәН·ВХжөДІаПтФШәЙ-ІаПтО»ТЖЗъПЯТФј°ДЬБҝ-ІаПтО»ТЖЗъПЯұдРОЗчКЖТ»ЦВЈ¬ҫЯМеКэҫЭјыұн2ЎЈКФСйІвөГЧоҙуІаПтФШәЙОӘ1 276.5 kNЈ¬·ВХжөГөҪЧоҙуІаПтФШәЙОӘ1 234.0 kNЈ¬КФСйІвөГЧоҙуІаПтФШәЙОӘ188.0 mmЈ¬·ВХжөГөҪөДЧоҙуІаПтО»ТЖОӘ183.2 mmЈ»ІвКФЦРјУФШІҪіӨҪПҙуЈ¬ЧоҙуДЬБҝОӘ173.7 kJЈ¬ТСҫӯі¬№эЧоРЎДЬБҝТӘЗуЈ¬·ВХжөДјУФШІҪіӨәЬРЎЈ¬өГөҪөДЧоҙуДЬБҝОӘ172.7 kJЈ¬ёХёХҙпөҪЧоРЎДЬБҝТӘЗуЎЈКФСйәН·ВХжКэҫЭөДПа¶ФОуІоЧоҙуҪцОӘ3.33%Ј¬ЛөГчУРПЮФӘ·ВХж·Ҫ·ЁКЗУРР§өДЈ¬ДЬ№»ОӘ·ӯіөұЈ»ӨҪб№№ЙијЖәНКөСйКТКФСйМṩІОҝјТАҫЭЎЈ
Нј12 ІаПтјУФШКФСйЧ°ЦГ
Fig. 12 Equipment of lateral loading experiment
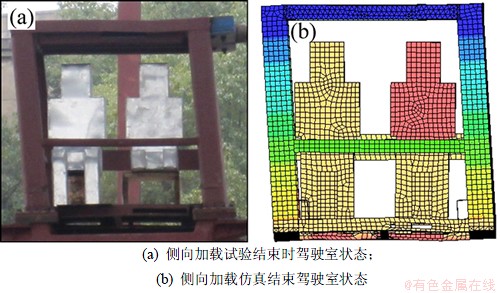
Нј13 ·ВХжУлКФСйІаПтјУФШҪб№ыұИҪП
Fig. 13 Comparison of results of simulation and lateral loading experiment
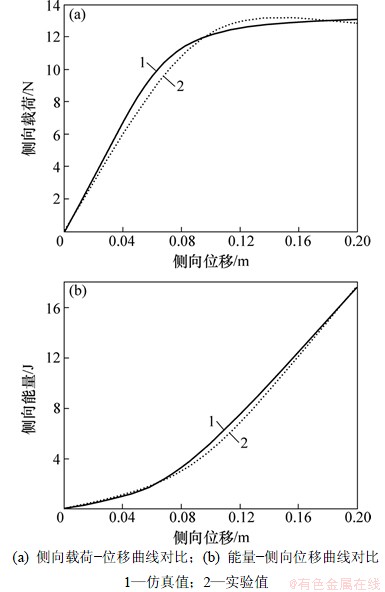
Нј14 КФСйУл·ВХжҪбЛщөГФШәЙЎўДЬБҝҪб№ы¶ФұИ
Fig. 14 Comparison of load and energy results of simulation and test
ұн2 КФСйУл·ВХжКэҫЭ¶ФұИ
Table 2 Comparison of test and simulation data
5 ҪбВЫ
(1) ёщҫЭ№ъјКұкЧј¶ФІаПтјУФШКұұдРОөДЛЩ¶ИТӘЗуЈ¬И·¶ЁБЛROPSІаПтјУФШөДј«ПЮФШәЙЎЈ
(2) ·ЦұрЙијЖБЛІаПтЎўҙ№ПтәНЧЭПтөДјУФШЗъПЯЈ¬ІўСйЦӨБЛЛщЙијЖјУФШЗъПЯөДәПАнРФЈ¬ОӘёГЧФР¶іөјЭК»КТROPS·ӯіөКФСйМṩБЛІОҝјЎЈ
(3) ёщҫЭЙијЖөДјУФШЗъПЯҪшРРПЦіЎКФСйЈ¬КФСйЛщөГКэҫЭУлУРПЮФӘ·ВХжҪб№ыТ»ЦВРФҪПәГЈ¬ұнГчІЙУГУРПЮФӘ·ВХж·Ҫ·ЁМжҙъПЦіЎКФСй¶ФҙуРНЧФР¶іөјЭК»КТ°ІИ«РФҪшРРЖА№АКЗҝЙРРөДЎЈ
(4) ёГЧФР¶іөјЭК»КТROPSФЪІаПтФШәЙәНДЬБҝЎўҙ№ПтФШәЙәНЧЭПтФШәЙҙпөҪ№ъјКұкЧј№ж¶ЁТӘЗуөДН¬КұЈ¬ROPS·ўЙъЛЬРФұдРОЈ¬ө«ЖдИОәОІҝ·Ц¶јОҙЗЦИлDLVЈ¬ұнГчёГЧФР¶іөјЭК»КТROPSВъЧг°ІИ«Зҝ¶ИТӘЗуЈ¬ёГЧФР¶іө·ӯіөұЈ»ӨҪб№№КөСйКТКФСйКЗҝЙРРөДЎЈ
ІОҝјОДПЧЈә
[1] Reynolds S J, Groves W. Effectiveness of roll-over protective structures in reducing farm tractor fatalities[J]. American Journal of Preventive Medicine, 2000, 18(4): 63-69.
[2] Kim T H, Reid S R. Malt axial softening hinge model for tubular vehicle roll-over protective structures[J]. International Journal of Mechanical Sciences, 2001(43): 2147-2170.
[3] Guzzomi A L, Rondelli V, Guarnieri A, et al. Available energy during the rollover of narrow-track wheeled agricultural tractors[J]. Biosystems Engineering, 2009, 104: 318-323.
[4] Alfaro J R, Arana I, Arazuri S, et al. Assessing the safety provided by SEA J2194 standard and code 4 standard code for testing ROPS, using finite element analysis[J]. Biosystems Engineering, 2010, 105: 189-197.
[5] Harris J R, Winn G L, Ayers P D, et al. Predicting the performance of cost-effective rollover protective structure designs[J]. Safety Science, 2011, 49: 1252-1261.
[6] СоБҰ·т, ХЕјТАш, »бО«·», өИ. ВЦКҪЧ°ФШ»ъ°ІИ«ұЈ»ӨЧ°ЦГЙијЖөДМҪМЦ[J]. јӘБЦ№ӨТөҙуѧѧұЁ, 1995, 25(1): 89-95.
YANG Lifu, ZHANG Jiali, FU Weifang, et al. The safety protection device for wheel loader[J]. Journal of Jilin University, 1995, 25(1): 89-95.
[7] №ұҝӯҫь, ЦоОДЕ©, СоЗм·р, өИ. №ц·ӯұЈ»ӨЧ°ЦГРФДЬКФСйәНІаПтјУФШКұДУ¶ИөДЛЬРФјЖЛг·Ҫ·Ё[J]. »ъРө№ӨіМС§ұЁ, 1996, 32(3): 47-50.
GONG Kaijun, ZHU Wennong, YANG Qinfu, et al. Laboratory tests of rops and a plasticmethod of determining defelection during side load[J]. Journal of Mechanical Engineering, 1996, 32(3): 47-50.
[8] НхјМРВ. №ӨіМіөБҫ·ӯіөұЈ»ӨҪб№№ЙијЖ·Ҫ·ЁУлКФСйСРҫҝ[D]. іӨҙә: јӘБЦҙуС§»ъРөҝЖС§Ул№ӨіМС§Фә, 2006: 69-126.
Wang Jixin. Design method and experimental study on the roll-over protective structures for engineering vehicles[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2006: 69-126.
[9] ЛҫҝЎөВ. »щУЪИЛМеЛрЙЛөД№ӨіМіөБҫ·ӯіөұЈ»ӨПөНіРФДЬСРҫҝ[D]. іӨҙә: јӘБЦҙуС§»ъРөҝЖС§Ул№ӨіМС§Фә, 2011: 48-130.
SI Junde. Study on the performances of the rollover protection system for engineering vehicles based on operator injury[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2011: 48-130.
[10] ЗъКШЖҪ, ВҪҙФәм, әоДҪУў, өИ. ISO№ШУЪ№ӨіМіөБҫ·ӯіөәНВдОпұЈ»ӨЧ°ЦГөДёЕДоУлТӘЗу[J]. Е©Тө№ӨіМС§ұЁ, 2002, 18(4): 193-197.
QU Shouping, Lu Conghong, Hou Muying. Outline of roll-over and falling object protective structure of engineering vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering, 2002, 18(4): 193-197.
[11] ХФәмО°, іВдмҝӯ, БЦТЭ. Е©УГіө·ӯіөұЈ»ӨҪб№№·ЗПЯРФУРПЮФӘ·ЦОц[J]. Е©»ъ»ҜСРҫҝ, 2008, 10: 24-27.
Zhao Hongwei, Chen Xiaokai, Lin Yi. Nonlinear finite element analysis of the ROPS[J]. Journal of Agricultural Mechanization Research, 2008, 10: 24-27.
[12] ЙРПюҪӯ, ЛХҪЁУо. ANSYS LS-DYNA¶ҜБҰ·ЦОц·Ҫ·ЁУл№ӨіМКөАэ[M]. ұұҫ©: ЦР№ъЛ®АыЛ®өзіц°жЙз, 2006: 132-164.
Shang Xiaojiang, Su Jianwei. ANSYS LS-DYNA dynamic analysis method and engineering examples[M]. Beijing: China WaterPower Press, 2006: 132-164.
(ұајӯ іВ°®»Ә)
КХёеИХЖЪЈә2013-01-06Ј»РЮ»ШИХЖЪЈә2013-04-20
»щҪрПоДҝЈә№ъјТёЯРВјјКхСРҫҝ·ўХ№јЖ»®(Ў°863ЎұјЖ»®)ПоДҝ(SS2012AA041809)Ј»әюДПКЎҝЖјјЦШҙуЧЁПојЖ»®ПоДҝ(2010FJ1003-2)
НЁРЕЧчХЯЈәМЖ»ӘЖҪ(1964-)Ј¬ДРЈ¬әюДПЧКРЛИЛЈ¬ҪМКЪЈ¬ҙУКВЦЗДЬҪб№№ЙијЖУлҝШЦЖЎў»ъРөФЛ¶ҜУлХс¶ҜҝШЦЖәН·ВЙъ»ъ№№ЙијЖСРҫҝЈ»өз»°Јә0731-88831737Ј»E-mailЈәhuapingt@csu.edu.cn

