�������ݵ�����ʽ��̬�滮�ڷֽ�¯
�¶ȿ����е�Ӧ��
��С�壬����
(������ѧ ��������ѧԺ������ ������530004)
ժҪ�����ô�ˮ�������ֳ��ɼ��ķֽ�¯���ݣ��Էֽ�¯����������������ݽ�ģ��������������ģ����������Ӧ��̬�滮�����㷨�У��γɻ������ݵ�����ʽ��̬�滮(HDP)�㷨����ѵ���ֽ�¯�����������ƽ������������������ģ���ܺܺõط�ӳ�ֽ�¯��״����ʵ�ַֽ�¯�¶ȵ��Ż����ƣ�ʹ�ֽ�¯�е�ȼ�ա����ȼ�̼���ηֽ���̵õ��Ż���
�ؼ��ʣ��ֽ�¯�������磻�Ż����ƣ�����ʽ��̬�滮������Ӧ��̬�滮
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0979-06
Applications of data-based heuristic dynamic programming temperature control of cement decomposition furnace
LIN Xiao-feng, SUN Xin
(School of Electrical Engineering, Guangxi University, Nanning 530004, China)
Abstract: The data of decomposition furnace was collected from cement production site, the data was used to model the model data of decomposition furnace with neural network. Then, the data model was used in iteration adaptive dynamic programming, the data-base iteration heuristic dynamic programming was formed. At the same time, the decomposition furnace controller was trained. The controlled result indicates that the constructed model has a good performance for decomposition furnace, and the temperature optimal control of decomposition furnace is achieved. The burning, heat exchange and decomposition process of Portland in decomposition furnace are optimized.
Key words: decomposition furnace; neural network; optimal control; heuristic dynamic programming; adaptive dynamic programming
���ɷ�ˮ������������������Ԥ�Ⱥ�Ԥ�ֽ⼼��Ϊ���ģ����ִ���ѧ�����㷺Ӧ����ˮ������ȫ���̣�ʹˮ���������и�Ч�����ʡ����ܡ���ࡢ���ϻ�������Ҫ�����װ�����ͻ������������Զ�����ʵ�п�ѧ�����ִ�����ˮ���������������ɷ�ˮ��������������Ԥ�����ͻ�תҤ֮������ֽ�¯�����ֽ�¯���¶ȿ�����Ӱ��ˮ�������������ȶ��Ĺؼ����أ��ֽ�¯�¶ȿ��ƹ��̾��з����ԡ���ȷ���Լ�ʱ�͵ȸ���ϵͳ����������ͨ�����������侫ȷ����ѧģ��[1]���ֽ�¯ÿ�춼�ڲ�������������������������ݣ��洢�����������ſ���ϵͳ���豸���еȵ���Ϣ��Ȼ������Щ���ݻ������������ţ����ڷֽ�¯�¶ȵĿ����������Ĵ�����������˵ľ��飬��û����������ʵ���������ݶԸù��̽��п��ơ���ˣ�������ڽ�������ϵͳ��ȷ��ѧģ��״���������Ч�������������������Ĵ������ݣ�ʵ�ֶ�ˮ��ֽ�¯�¶ȿ���ϵͳ�Ŀ���,�ѳ�Ϊ����ʵ��������Ҫ��������⡣
����Ӧ��̬�滮���ں϶�̬�滮���������ǿ��ѧϰ�ķ�����ͨ������Bellman��̬�滮�����еĴ��ۺ���(cost-to-go)���Ӷ����⡰ά���֡����⣬���ǽ�����ģ������ϵͳ�Ż�����������ʵ���е����ۺͷ�����������������Ӧ��̬�滮�����Ѿ������˶����ѧ������ͨѶ����[2]������������[3]�͵���ϵͳ����[4]������ȡ�÷�˶�ijɹ�������Ӧ��̬�滮�ڻ������ݵ��Ż����Ʒ���Ҳȡ����һ���Ľ�չ��Si��[5]���һ������ǿ��ѧϰ(On-line reinforcement learning)����; Lee��[6]�����һ�ֲ��þֲ���Ȩƽ�������ƽ�����Q-Learning ǿ��ѧϰ��ADP�㷨���������߽��������ݵĿ���������Ӧ��̬�滮���ϣ������������ݵ�����ʽ��̬�滮(HDP)�㷨�����ؽ����ֽ�¯��ȷ����ѧģ�ͣ���������ʵ���������ݽ�ģ������Ʒֽ�¯����ϵͳ��������ʵ�ֶԷֽ�¯���¶��Ż����ơ�
1 �ֽ�¯���乤�ս���
�ֽ�¯����������ͼ1��ʾ�����Ϸ۾�������Ͳ����Ԥ����������Ͳ������������ֻ�ϣ������Ƚ�����Ȼ�����ֽ�¯������ӷֽ�¯�ϲ������ú�ۻ��ȼ�գ����ҵؽ��зֽⷴӦ�����Ͼ����ֽ�¯�ֽ�Ϊ���Ϻ���뵽��תҤ[7]���ֽ�¯��Ԥ�ֽ�Ҥϵͳ�ĺ��IJ��֣����е���Ԥ�ֽ�Ҥϵͳ��ú��ȼ�ա����̻����Լ�̼���ηֽ�����Ҥ¯ϵͳ��ȼ�ϵ�60%�����ֽ�¯��Ϊ̼���ηֽ��ṩ������̼���ε���Ч�ֽ���Ҫһ������ȶ����¶ȣ��¶ȹ����߹��ͽ�������豸��ˮ�������½�����ˣ����ַֽ�¯�ڵ��¶��ڹ���Ҫ����¶ȷ�Χ����������Ϸֽ��ʺ��ȶ�����������Ϊ��Ҫ��

ͼ1 �ֽ�¯��������ͼ
Fig.1 Flow-chart of decomposing furnace
2 �������ݵķֽ�¯ģ��
Ӱ��ֽ�¯�¶ȵ����غܶ࣬���������պ��ֳ��������ݵķ����Լ�������Ա�����ܽ�[8]�������ܽ��Ӱ��ֽ�¯�¶ȵ���Ҫ����Ϊ��ιú����3�η�����������������3��������ʵ�����ݴ�ˮ�೧�����ֳ��ɼ�(�����е�DCSϵͳ�е���Excel��ʽ������)���ɼ������ݽ���Ϊ�ֽ�¯ģ�͵�ѵ������������
����ѵ����������ʱ�����ݹ���Ҫ��Ͳ������飬�ܽ�����ɼ������IJ�����Χ��Ȼ��������ֵ��Сֵ���ķ�����������һ���ֲ��ڴ˷�Χ�ڵ����ݡ��ô����ú�����ݵ�5 000����Ϊѵ������������100����Ϊ�������������������������Ҫ�Ƚ����ݽ��й�һ������������(-1��1)֮�����ֵ��Ȼ��ͨ��ͼ2��ʾ�����ݽ�ģ��ʽ���������編�����������ݵķֽ�¯ģ�͡�
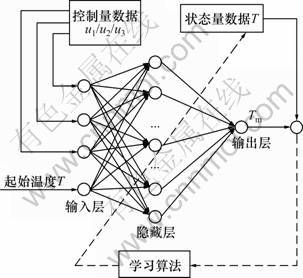
ͼ2 �������ݵķֽ�¯��ģ�ṹͼ
Fig.2 Decomposition furnace modeling system based on data
ͼ2�У�����������u1��u2��u3�ֱ��ʾ����Ŀ�����3�η�����ιú��������������״̬������T������ʵ�ʿ��ƶ��������¶ȣ�Tm��ģ��������¶ȣ������ھ��DZ��о���������ģ�͡���������ģ�������������ݺ����3��BP������ѵ����Ȩϵ��(Ҳ����Ȩֵ)���õ��Ļ������ݵ�������ģ�͡���������������ô�ˮ�೧�����ֳ��ɼ���3�η�����ιú�������������Լ��¶�4��������ʵ�����ݣ����������뵽�������У�����ͨ��ѧϰ�����ϵ���Ȩֵ�����ͬʱͨ������ѧϰ�ʣ�������������ݵķֽ�¯ģ�͡��������ز�ļ����ȡS�ʹ��亯���������ļ����ȡ���Դ��亯����ͼ3��ʾΪ��������ģ�������������ͼ����ͼ3���Կ�������������ģ���ܽϺõ�ģ��ֽ�¯ʵ�������Ĺ��̡�
3 �������ݵ�HDPԭ��
3.1 ��ɢʱ��HJB����
���ȿ���������ɢʱ����������ϵͳ��
 (1)
(1)
����x Rn��f(x)Rn��g(x)Rn��m������uRm�����跽��(1)�ڦ�Rn���ȶ��������ҵ�u(xk)��ʹ�ô��ۺ�����С�����ۺ���ͨ������ʽ�Ӹ�����
Rn��f(x)Rn��g(x)Rn��m������uRm�����跽��(1)�ڦ�Rn���ȶ��������ҵ�u(xk)��ʹ�ô��ۺ�����С�����ۺ���ͨ������ʽ�Ӹ�����
 (2)
(2)
���� Ϊ������Ч�ú�����Ч�ú������Դ���ϵͳ�������ⲿ���������ȸ��־���ʵ�����������ָ�꺯�����������ʽ���Ը��ݲ�ͬʵ�ʹ�ҵ����������о���ķ����Ͷ��塣ʽ(2)��QRn��n��RRm��m�������ģ���
Ϊ������Ч�ú�����Ч�ú������Դ���ϵͳ�������ⲿ���������ȸ��־���ʵ�����������ָ�꺯�����������ʽ���Ը��ݲ�ͬʵ�ʹ�ҵ����������о���ķ����Ͷ��塣ʽ(2)��QRn��n��RRm��m�������ģ��� x��0��
x��0�� ��x=0ʱ��xTQx=0����ˣ������������ȶ��ұ�֤����(2)���н�ģ����ܱ�֤uxΪ��������(Admissible controls)[9]��
��x=0ʱ��xTQx=0����ˣ������������ȶ��ұ�֤����(2)���н�ģ����ܱ�֤uxΪ��������(Admissible controls)[9]��
���� �������ƣ����u(x)�ڦ���������u(0)=0��uʹ��ʽ(1)�ڦ����ȶ�������x0����ʹ��V(x0)�н磬����Զ���һ���ڦ�������ڷ���(2)����������u(x)������(2)��дΪ��

 (3)
(3)
���ݱ���������ԭ����Hamilton-Jacobi-Bellman (HJB)���̿���д�ɣ�
 (4)
(4)
���ſ��ƶ���u*����һ�ױ�Ҫ����������(4)�ұ߲��ֶ���u���ݶȣ���
 (5)
(5)
��ˣ����Եõ���
 (6)
(6)
��ʽ(6)����ʽ(4)���Եõ���ɢʱ���HJB���̣�
 (7)
(7)
����ڽ�Ӧ�õ���HDP[10]�㷨�����HJB����(7)��ֵ����V*��
3.2 ��������HDP�㷨��ʵ��
��������HDP�㷨��3�������繹���Ķ������硢ģ�����������������ɣ���ͼ4�е��㷨������ʾ��
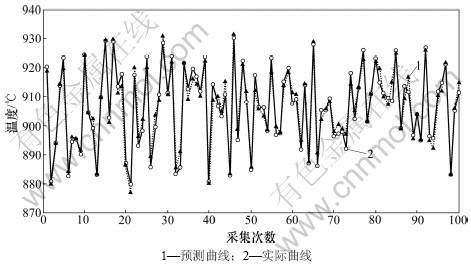
ͼ3 �������ݵķֽ�¯ģ�����������������
Fig.3 Fitting ability test curves of data-base decomposition furnace model
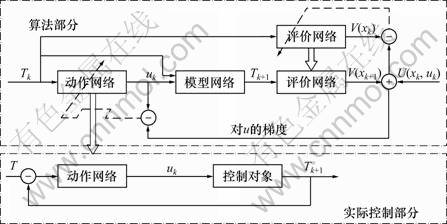
ͼ4 �������ݵķֽ�¯�¶ȿ���ϵͳ�ṹͼ
Fig.4 System chart of decomposition furnace temperature control based on data
(1)ģ�����硣ģ����������ģ�ⱻ�ض���Ԥ�ⱻ�ض������һ״̬��ͼ4�е�ģ��������ͨ�����ݽ�ģ�ķ������������ķֽ�¯ģ�ͣ���ͼ2��ʾ��
(2)�������硣���������������㷨�ĺ��IJ��֣���������������ָ�꺯�����������ǶԶ�������Ķ����������ۡ�
(3)�������硣��������������һ������������������ƿ��Ʋ��ԡ����������������������������Ʋ��ԡ����������Ŀ�꺯����ʽ(6)������
һ������£�HJB����(7)�е�V(xk)Ϊ״̬����xk��ǿ�����Ժ���������������Ҫ�õ�����ָ�꺯������һʱ�̵�ֵV(xk+1)�����V(xk)����ˣ�����ָ�꺯��V(xk)ͨ����δ֪�ġ���ϵͳ��״̬����δ֪������£�����ָ�꺯��V(xk)��������ȷ������ʹ�û��ڶ�̬�滮HJB����ֱ������ü��������ܡ���ˣ����һ�ֻ������ݵ�ֵ���������㷨����Ż��������������������i(Ҳ��Ϊ����ָ��)(i=0, 1, 2, ��)�����ȴӳ�ʼ����ָ�꺯��V0(x)=0��ʼ������ÿһ���������������綼�����������ui(xk)��������ui(xk)��������������ģ�͵ó�״̬����xk+1����ͨ����������õ�����Vi(xk+1)������i=0, 1, 2, ��������
 (8)
(8)
���Կ�������������ָ�꺯��Vi(xk)�Ӹ����ij�ʼ����ָ�꺯��V0(x)��ʼ����������ui(xk)�ĸ��¶����ϸ���,�γɻ������ݵ�HDP�㷨��������������繹��ϵͳ��������ͬʱ�ƽ�����ָ�꺯����ui(xk)������ôVi+1(xk)������ˣ�ͨ��ֵ����������(8)����������Ż����ƿ��С�
4 ���������
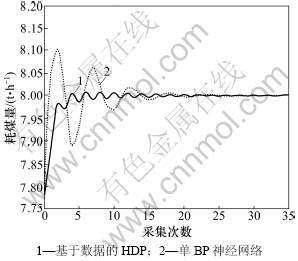
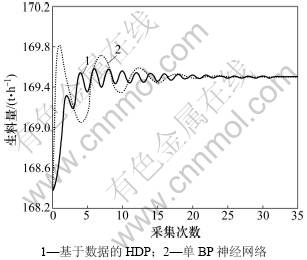
��ѵ���õķֽ�¯ģ����Ϊ��������HDP�㷨�е�ģ�����磬�������ݵķֽ�¯�¶ȿ���ϵͳ�ṹͼ��ͼ4��ʾ����Ϊ����ˮ����豸�ڿ�������һ��Ԥ�ȵĹ��̣���ˣ��Ƚ��ֽ�¯���¶��˹��ؿ��Ƶ�850 �档ͬʱ���ݹ���Ҫ��Ͳ�����Ա�ľ��飬��Ŀ���¶����900 �档ͼ5��ʾΪ�¶ȿ���Ч���Ƚ�ͼ����ͼ5���Կ�����������С��ʱ�䲨�����ֽ�¯���¶ȱ����Ƶ�900 �棬�ֽ�¯�е�ú��ȼ�ա����̻����Լ�̼���εķֽ���̵õ����Ż���ͼ6��8�ֱ���ʾ��3���������ı仯�������ͼ�п��Կ���3�η�������ú������������������С��ʱ�䲨�����ﵽ����Ӧ���Ż���������
�ѻ������ݵ�HDP�㷨�ķֽ�¯�¶ȿ��ƹ����뵥BP������ֽ�¯�¶ȿ��ƹ������Ƚϡ���2���㷨�¶ȿ��ƱȽ�ͼ(��ͼ5)���Կ������������ݵ�HDP�㷨������������ʱ���ϻ����ڿ��ƹ����в�������϶����ֳ������õĿ���Ч������ͼ6��8��3���������Ŀ��ƹ��̱Ƚ�ͼ���Կ������������ݵ�HDP�㷨3��������������ʱ��Ϳ��ƹ��̵IJ�����������Աȵ�BP�������㷨�ĺá�
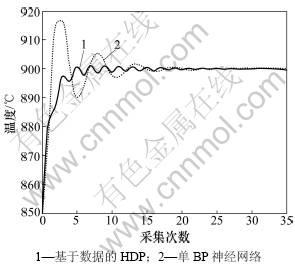
ͼ5 �¶ȿ���Ч���Ƚ�ͼ
Fig.5 Comparison chart of temperature control effect
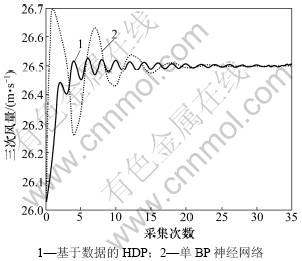
ͼ6 3�η�������Ч���Ƚ�ͼ
Fig.6 Comparison chart of three air volume control effects
ͼ7 ιú������Ч���Ƚ�ͼ
Fig.7 Comparison chart of coal volume control effect
ͼ8 ����������Ч���Ƚ�ͼ
Fig.8 Comparison chart of raw material control effect
5 ����
������Խ���ˮ��ֽ�¯��ѧģ�͵�״������������˷ֽ�¯���ݽ������ݽ�ģ��ͨ������������ģ�͵����������������ģ���ܺܺõط�ӳˮ��ֽ�¯���̣�Ȼ����������ģ����������Ӧ��̬�滮ֵ�����㷨�У��γɻ������ݵ�����ʽ��̬�滮(HDP)�㷨��ͨ�����㷨ѵ�����ֽ�¯�¶ȿ���ϵͳ���Ż���������ʵ�ֶ�ˮ��ֽ�¯�¶ȵ��Ż����ơ����Ʒ������������������ݵ�HDP��ˮ��ֽ�¯�¶ȿ� �ƿ���ʹ�÷ֽ�¯�е�ȼ�ա����ȼ�̼���ηֽ���̶��õ��Ż����Ӷ������ܺĺ����ˮ��������
�ο����ף�
[1] ����Զ, ��, �Ŷ���. ���ɷ�ˮ��ֽ�¯�¶ȿ��Ƶ�ANFIS��ʶ�����[J]. ��������, 2009(11): 14-20.
XIONG Yun-yuan, WAN Chun-hong, ZHANG Dong-ning. Identification and simulation of ANFIS model for new dry-process cement production precalciner temperature control[J]. Electrical Engineering, 2009(11): 14-20.
[2] LIU De-rong, ZHANG Yi, ZHANG Hua-guang. A self-learning call admission control scheme for CDMA cellular networks[J]. IEEE Transactions on Neural Networks, 2005, 16(5): 1219-1228.
[3] Enns R, Si J. Helicopter trimming and tracking control using direct neural dynamic programming[J]. IEEE Transactions on Neural Networks, 2003, 14(4): 929-939.
[4] LIU Wen-xin, Venayagamoorthy G K, Donald C, Wunsch ��. A heuristic dynamic programming based power system stabilizer for a turbogenerator in a single-machine power system[J]. IEEE Transactions on Industry Applications, 2005, 41(5): 1377-1385.
[5] Si Jennie, WANG Yu-Tsung. On-line learning control by association and reinforcement[J]. IEEE Transactions on Neural Networks, 2001, 12(2): 264-276.
[6] Lee J M, Lee J H. Approximate dynamic programming-based approaches for input-out data-driven control of nonlinear processes[J]. Automatica, 2005, 41(7): 1281-1288.
[7] ���Z, Ԭ����, ����. ����ˮ��ֽ�¯�����������Ż�����[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 22(2): 124-127.
GUO Jing, YUAN Zhu-gang, SHEN Tao. Optimization control simulation based on the behaviour identification of cement decomposition furnace[J]. Journal of University of Jinan: Science and Technology, 2008, 22(2): 124-127.
[8] Ԭ����, ��С��, ����. ģ�����Ƽ�����ˮ��ֽ�¯��Ӧ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 20(1): 58-61.
YUAN Zhu-gang, DI Xiao-feng, SHEN Tao. Fuzzy control and it s application in cement decompose stove[J]. Journal of University of Jinan: Science and Technology, 2006, 20(1): 58-61.
[9] Abu-khalaf M, Lewis F L. Nearly optimal control laws for nonlinear systems with saturating actuators using a neural network hjb approach[J]. Automatica, 2005, 41(5): 779-791.
[10] Tamimi A, Lewis F L, Abu-Khalaf M. Discrete-time nonlinear hjb solution using approximate dynamic programming: Convergence proof[J]. IEEE Transactions on Systems, 2008, 38(4): 943-949.
(�༭ ����)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(60964002)��������Ȼ��ѧ�����ص�������Ŀ(61034002)��������Ȼ��ѧ����������Ŀ(2011jjc70001)
ͨ�����ߣ�����(1983-)���У����������ˣ�˶ʿ�о��������������Ż��о����绰��15289685487; E-mail: sun-xing-xing@163.com

