蒸汽动力舰船回汽制动机理与系统建模仿真
朱泳1,金家善1,刘东东2
(1. 海军工程大学 船舶与动力学院,湖北 武汉,430033;
2. 中国人民解放军91550部队 87分队,辽宁 大连,116023)
摘要:针对大型蒸汽动力舰船传统制动方法机动性差的问题,分析回汽制动技术的机理,并基于Matlab-Simulink环境,建立由调节阀、正车汽轮机、倒车汽轮机、螺旋桨及舰船负载等组成的回汽制动系统各组成部分及全系统的仿真模型。通过舰船的自然滑行试验和回汽制动试验,对模型进行验证。实验结果表明:仿真结果与试验结果基本一致,在汽轮机强度允许的范围内,回汽制动较传统制动方法能大幅度缩短制动时间,增加舰船机动性。
关键词:蒸汽动力舰船;回汽制动;机动性;倒车汽轮机;建模仿真
中图分类号:TK267 文献标志码:A 文章编号:1672-7207(2013)07-2771-07
Numerical modeling and mechanism of back-steam braking for steam-powered ships
ZHU Yong1, JIN Jiashan1, LIU Dongdong2
(1. College of Power Engineering, Naval University of Engineering, Wuhan 430033, China;
2. 87 Unit of No.91550 Troops of PLA, Dalian 116023, China)
Abstract: For the defects of poor maneuverability in traditional braking method of steam-powered ships, the mechanism of back-steam braking for steam-powered ships was analyzed. The simulation models of the composition units and whole system for the braking system were created based on the Matlab-Simulink, including the models of valves, head steam turbines, back steam turbines, screw propellers and the ship loads. The model was validated through natural coasting test and back-steam braking test. The results show that the simulation results are consistent with the test data. Back-steam braking technology can reduce braking time and improve maneuverability of the ships obviously. Also, the technology can be used for braking problem of the nuclear-powered ships with the same braking principles.
Key words: steam-powered ships; back-steam braking; maneuverability; back steam turbines; modeling and simulation
舰船的制动能力是舰船一个重要技术指标,它决定舰船的机动性,通常以舰船从航行状态转换为停止状态所需要的时间来度量[1]。蒸汽动力舰船的传统制动方法主要包括:完全关闭工作汽轮机进汽阀,停止工作汽轮机进汽,使舰船滑行至停止状态;或在工作汽轮机进汽阀完全关闭后,打开不工作汽轮机进汽阀,向不工作汽轮机进汽,加速舰船停止[2]。鉴于大型蒸汽动力舰船在国内外大型水面舰船中不可或缺的地位,蒸汽动力舰船制动一直是重要研究方向。如:田兆斐等[3-4]建立湿蒸汽轮机功率及转速全工况实时仿真模型,分析了通过改变主机喷嘴阀开度,进而改变高、低压汽轮机功率,实现舰船制动的过程。Zimmer[5] 建立了船舶蒸汽轮机蒸汽膨胀做功及推进系统模型,仿真分析主机喷嘴阀完全关闭后船舶自然滑行制动过程。Fredrik[6]基于Simulink环境建立倒车汽轮机功率模型,仿真正车汽轮机关闭后启用倒车汽轮机制动船舶的过程。传统方法虽然保证了蒸汽动力舰船制动的可行性与安全性,但是制动时间过长,降低了舰船的机动性。为了缩短蒸汽动力舰船的制动时间,提高其机动性,本文作者提出了正、倒车汽轮机同时进汽以加速舰船制动的回汽制动技术,首先分析该技术的机理,然后建立倒车汽轮机回汽制动功率计算模型,在此基础上建立了蒸汽动力舰船回汽制动系统的数学模型,并基于Matlab-Simulink环境建立仿真模型,对蒸汽动力舰船的回汽制动过程进行了仿真分析。
1 蒸汽动力舰船回汽制动机理
图1所示为蒸汽动力舰船回汽制动系统的结构原理图。该制动系统装置由调节阀、高压汽轮机、低压汽轮机、倒车汽轮机、传动设备、轴系和推进器组成。调节阀用于控制蒸汽流量,高压汽轮机及低压汽轮机通过传动设备及轴系驱动推进器产生推力推动舰船,倒车汽轮机产生阻力制动舰船。
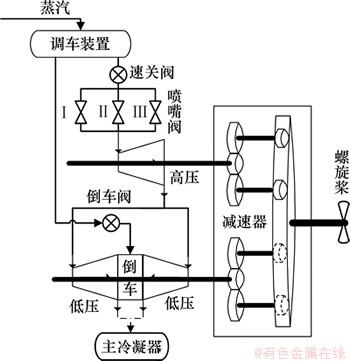
图1 回汽制动系统的结构原理图
Fig.1 Construction principle chart of back-steam braking system
从现象上看,回汽制动技术是指在正车汽轮机进汽阀开度关小的过程中,向不工作的倒车汽轮机供汽。从原理上看,它是指通过与当前工作汽轮机做功方向相反的汽轮机(称为不工作汽轮机)的进汽并做功,产生与主汽轮机当前旋转方向相反的作用力,使主汽轮机在该反向作用力与螺旋桨阻力的共同作用下,很快停车。从本质上看,它是动力监控系统的一组计算机程序,用于控制主汽轮机的正倒车进汽阀门,在工作的正车汽轮机仍有进汽的状态下,向不工作的倒车汽轮机供汽,实现回汽制动功能。由于正车和倒车汽轮机的喷嘴阀分别由不同的执行机构控制,两者之间没有机械方面的动作约束,因而2个喷嘴阀不仅可以同时关闭,也允许同时打开,这为回汽制动的实现提供了条件。
因此,可以将制动过程分为2个阶段:首先,根据锅炉负荷变化能力,确定正车喷嘴阀允许的最大关闭速度,以此速度关闭正车喷嘴阀减少正车汽轮机供汽,同时逐步合理的打开倒车调节阀,使倒车汽轮机发出回汽制动功率,这时高、低压汽轮机转子、齿轮减速器、轴系、螺旋桨,在惯性力作用下仍以正车方向继续转动,舰船向前滑行,倒车转矩使正车方向旋转的正车汽轮机加速停止转动,此时舰艇仍以正航方向航行;然后,倒车汽轮机开始倒转,随着倒车功率的逐渐增大,舰船停止向前滑行。
2 回汽制动系统数学模型
由于蒸汽动力舰船的回汽制动是一个很复杂的过程,伴随着流动、传热、能量转化及转子、桨轴的机械运动等过程。建模之前要根据工作机理进行环节划分,然后根据质量方程、动量方程、能量方程、热力学参数方程等对各模块进行计算。因此,在构建该回汽制动系统的数学模型时,首先对调节阀、正车汽轮机、倒车汽轮机、船桨等系统各主要组成部件和船体的运动分别进行数学建模,然后将各分模型有机连接起来,最终构建出完整的回汽制动系统的总体模型。
2.1 调节阀流量模型
系统中调节阀主要有喷嘴阀及倒车调节阀,都是对数特性阀[7],在给定阀门开度和前后压差后,即可计算阀门的入口过热蒸汽流量。
当(P0-P1)/P0<FKXT时,调节阀进汽流量可以表示为:
 (1)
(1)
式中:P0和P1为调节阀前、后蒸汽压力;KV为调节阀的流量系数;G为过热蒸汽的质量流量;y为膨胀系数;XT为喷嘴阀的临界压差比;ρs为喷嘴阀前蒸汽的密度,可由水蒸汽热力计算函数[8]得到;FK为比热比系数,对于过热蒸汽,FK=k/1.4(k为过热蒸汽的绝热指数)。
 (2)
(2)
对数阀的流量特性方程[9]:
 (3)
(3)
式中:KVmax为调节阀全开时的流量系数;R为调节阀可调比;θt为t时刻调节阀开度;lt为调节阀t时刻阀芯位移与全开位移之比,lt与θt一一对应。
当(P0-P1)/P0>FKXT时,调节阀进汽流量可以表示为:
 (4)
(4)
2.2 正车汽轮机推进模型
正车级由调节级、非调节级组成,采用速度三角形法计算两类级的推进功率:首先,计算各级入口蒸汽流量,然后,作出各级的速度三角形,最后,根据流量与动叶入口、出口的蒸汽速度得到推进功率。
2.2.1 调节级的流量模型
调节级进汽流量可以用下式计算[3]:
 (5)
(5)
式中:VP为速关阀开关位置;P1r和P0r分别为变工况和设计工况下的调节级前压力;G1r和G0r分别为变工况和设计工况下调节级蒸汽流量;T1r和T0r分别为变工况和设计工况下的调节级前温度;β为可调节的修正系数;f(θ)为流量与凸轮转角的拟合关系式。
2.2.2 非调节级的流量模型
根据Flugel公式,可得非调节级在变工况前后处于临界状态的进汽流量方程[10]:
 (6)
(6)
式中:G0和G1分别为额定工况下、变工况下非调节级入口蒸汽流量;P0和P1分别为额定工况下、变工况下非调节级前蒸汽压力;T0和T1分别为额定工况下、变工况下非调节级前蒸汽温度。
非调节级在变工况前后处于非临界状态的进汽流量方程[11]:
 (7)
(7)
式中:P20和P2分别为额定工况下、变工况下级后蒸汽压力。
2.2.3 正车级推进功率模型
对于高、低压汽轮机内的蒸汽膨胀做功过程,在一元流动假设下,按平均半径上的基元级进行计算,求出汽流速度和蒸汽参数的变化,最后得到第i级动叶栅发出的功率:
 (8)
(8)
式中:Wgi为正车第i级动叶栅发出的功率;G为级入口蒸汽流量;ω1和ω2为动叶入口、出口蒸汽相对于动叶栅的相对速度;β1和β2为蒸汽切入、切出动叶角;△Wi为正车第i级内除喷嘴、动叶、余速损失外的其余各种功率损失,计算公式多为在试验基础上建立的经验公式[12]。
喷嘴入口、出口过热蒸汽速度计算方程:
 ,
, (9)
(9)
式中:h0为喷嘴入口过热蒸汽焓值;h1t为不考虑流动损失时喷嘴出口过热蒸汽焓值;c0为喷嘴入口过热蒸汽速度;c1为喷嘴出口过热蒸汽速度;φ为喷嘴速度系数;ν0为过热蒸汽的比热容。
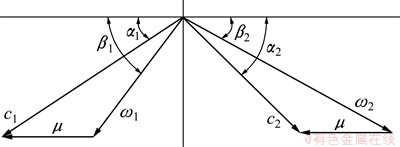
图2 汽轮机级的速度三角形
Fig.2 Velocity triangle of steam turbine stage
图2所示为汽轮机级的速度三角形,根据速度三角形的几何关系式可以得出:
 (10)
(10)
式中:c2为动叶出口蒸汽的绝对速度;μ为动叶栅的圆周速度;ψ为动叶速度系数; 和
和 分别为蒸汽流出喷嘴、动叶的汽流角;σ为动叶栅的反动度;△han为蒸汽在喷嘴内焓降。
分别为蒸汽流出喷嘴、动叶的汽流角;σ为动叶栅的反动度;△han为蒸汽在喷嘴内焓降。
2.3 倒车汽轮机回汽制动模型
回汽制动系统中倒车汽轮机通流部分由双流程冲动式汽轮机组成,采用倒车汽轮机回汽制动舰船时,倒车级动叶的圆周速度方向经历了由正车方向变为倒车方向的过程,倒车级的速度三角形也随之发生了变化。因此,利用速度三角形法计算回汽制动功率时分为2类,一类是倒车级动叶的圆周速度方向为倒车方向的制动功率,此时制动功率就是倒车汽轮机发出的倒车推进功率,这类制动功率的模型建立方法与正车级推进功率模型的建立方法类似;另一类是倒车级动叶的圆周速度方向为正车方向的制动功率。
图3所示为倒车级动叶的圆周速度方向为正车方向时,倒车级的两级速度三角形。首先考虑入口撞击损失和第1级动叶损失,作出第1级动叶出口速度三角形,由此得到第1级的圆周分速之和。然后,在考虑导叶入口撞击损失、导叶损失的基础上,可作出第2级动叶入口速度三角形。最后在考虑动叶入口撞击损失和动叶损失的基础上,作出该级的出口速度三角形。
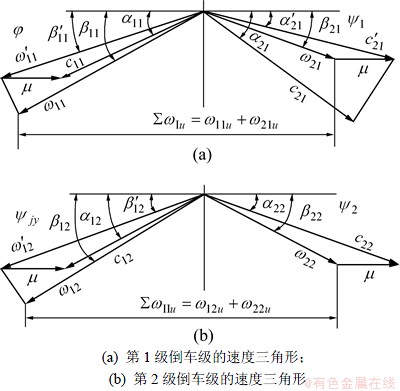
图3 圆周速度方向为正车方向时倒车级的速度三角形
Fig.3 Velocity triangle of back steam turbines while peripheral speed be head position
根据图3(a)所示的倒车级第1级速度三角形几何关系式可以得:
 (11)
(11)
式中: 和
和 分别为蒸汽流出倒车级第1级的喷嘴、动叶的汽流角;β11和β21分别为蒸汽切入、切出倒车级第1级动叶角;ω11和ω21分别为倒车级第1级动叶入口、出口蒸汽相对于动叶栅的相对速度;
分别为蒸汽流出倒车级第1级的喷嘴、动叶的汽流角;β11和β21分别为蒸汽切入、切出倒车级第1级动叶角;ω11和ω21分别为倒车级第1级动叶入口、出口蒸汽相对于动叶栅的相对速度; 和
和 分别为倒车级第1级动叶入口蒸汽冲击动叶栅的相对速度、冲击角;
分别为倒车级第1级动叶入口蒸汽冲击动叶栅的相对速度、冲击角; 为倒车级第1级动叶出口蒸汽的绝对速度;c21为导叶入口蒸汽速度;ψ1为倒车级第1级动叶的速度系数。
为倒车级第1级动叶出口蒸汽的绝对速度;c21为导叶入口蒸汽速度;ψ1为倒车级第1级动叶的速度系数。
将式(11)中各参数式代入式(12),可得倒车级动叶的圆周速度方向为正车方向时,倒车级第1级动叶栅的功率消耗量:
 (12)
(12)
式中:WDT1为倒车级第1级动叶栅的功率消耗量;GDT为倒车级第1级进汽量。
过热蒸汽流经导叶后速度发生变化,可以表示为:
 (13)
(13)
式中:ψjy为导叶速度系数;c12为导叶出口过热蒸汽速度。
同理,根据图3(b)可得倒车级动叶圆周速度方向为正车方向时,倒车级第2级动叶栅的功率消耗量:
 (14)
(14)
式中:WDT2为倒车级第2级动叶栅的功率消耗量;β12和β22分别为蒸汽切入、切出倒车级第2级动叶角;ω12和ω22分别为倒车级第2级动叶入口、出口蒸汽相对于动叶栅的相对速度。
此外,倒车级动叶圆周速度方向为正车方向时,蒸汽从进入倒车级动叶至流出动叶的过程中,有2处弹性撞击会消耗动叶功率,对舰船产生制动效果。第1处弹性撞击是流出喷嘴的蒸汽对第1列动叶栅的弹性撞击,撞击后蒸汽相对速度由降为ω11,则第1列动叶栅撞击功率损失WS1为:
 (15)
(15)
第2处弹性撞击是导叶出口蒸汽对第2列动叶栅的弹性撞击,撞击后蒸汽相对速度 变为ω12,则第2列动叶栅撞击功率损失WS2为:
变为ω12,则第2列动叶栅撞击功率损失WS2为:
 (16)
(16)
最后,将式(12),(14),(15),(16)相加,可得当动叶圆周速度方向为正车方向时,倒车级两级动叶的功率消耗量,即回汽制动功率WDT:

 (17)
(17)
2.4 船桨系统数学模型
回汽制动工况下,主汽轮机组为双轴输出功率,即高压汽轮机转子与低压汽轮机转子分别输出功率到减速器上。决定汽轮机转子运动的因素首先是倒车级制动功率,其次是正车级推进功率,再次是负载反功率,最后是摩擦功率。不平衡功率使转子产生角加速度。高、低压转子动力学方程[13]分别为:
 (18)
(18)
 (19)
(19)
式中:ng和nd分别为高、低压转子转速;Jg和Jd分别为高、低压转子的转动惯量;∑Wgi和Wd分别为高、低压转子产生的驱动功率;Wgf和Wdf分别为高、低压转子的摩擦功率;Wgl和Wdl分别为高、低压转子负荷消耗功率。
桨轴的动力学方程为:
 (20)
(20)
式中:ns为螺旋桨转速;Js为桨轴的转动惯量;为考虑到螺旋桨附加水的系数;Wgd为桨轴上的驱动功率;Wsf为桨轴的摩擦功率;Wz为螺旋桨的转动功率。
传动比关系:
 ,
, (21)
(21)
式中:ig和id分别为高、低压转子减速器的传动比。
在有减速装置的情况下,应考虑减速装置的效率,文中假设高、低压转子经减速装置传递功率的效率相等,即
 (22)
(22)
式中:η为减速装置的机械效率。
螺旋桨的转动功率WZ[14]由式(23)给出:
 (23)
(23)
 (24)
(24)
式中:KQ为扭矩系数,与进程比λP和螺距θ相关,通常用螺旋桨图谱表示它们之间的关系;ρ为水的质量密度;D为桨的直径;ξ为伴流系数;Vs为舰船航速。
船体平动模型将推力作为输入量,根据式(25)可计算船舶的速度[15]:
 (25)
(25)
 (26)
(26)
式中:Vs0和Vs分别为0时刻、t时刻的舰船航速;T和R分别为船体推力、阻力;α2为考虑船体附加水的系数;m为全船总质量;KT为推力系数;与进程比λP和螺距θ相关;t1为推力减额系数;t2为调距桨附加推力系数;Cs为船体负荷系数(包括装载量、风浪等因素);r和Z为阻力系数,一般Z取常数2,r与舰船载重、污底、风浪、水流等因素有关。
3 仿真模型
3.1 回汽制动系统Simulink仿真模型
在构建上述回汽制动系统各主要组成部件和船体运动的数学模型后,采用Matlab/Simulink仿真工具箱建立回汽制动系统仿真模型(如图4所示)。图中包含正车汽轮机功率计算单元、倒车汽轮机回汽制动功率计算单元、转子及桨轴单元、船体平动单元等封装的子系统模块。
3.2 仿真曲线及计算结果
给定主要仿真参数如下:舰船排水量为60 000 t,螺旋桨直径为6 m,伴流系数为0.3,海水密度为1 025 kg/m3,正车喷嘴阀匀速关闭,倒车调节阀匀速开启。
建立仿真模型,结合仿真参数,对某型蒸汽动力舰船采用高参数过热蒸汽回汽制动的过程进行仿真,最终得到舰船在不同工况下制动所需的时间。
图5所示为舰船从最大航速开始,以160 s时间匀速关闭正车喷嘴阀、舰船自然滑行制动时,航速与时间对应关系的试验曲线与仿真曲线。图中,t和t0分别为仿真时间与全速自然滑行降速至停止时间;v和vmax分别为舰船速度与舰船最大速度。图6所示为舰船从58%最大航速开始,以90 s时间匀速关闭正车喷嘴阀、同时以110 s匀速打开4个倒车调节阀回汽制动时,舰船航速与时间对应关系的试验曲线与仿真曲线。由图5和图6可知:模型建立正确,可以用于蒸汽动力舰船回汽制动的全系统仿真。
图7所示为舰船从最大航速以不同方式制动时,航速与时间的关系曲线。曲线1是舰船自然滑行方式下航速与时间的关系曲线。由于受到汽轮机强度条件的限制,对开始回汽制动时的汽轮机转速要加以限制,以保证主机的安全,因此不能在关闭正车喷嘴阀的同时,直接完全打开倒车调节阀给倒车级进汽,必须等舰船自然滑行至一定航速,才能开始回汽制动。因此,曲线2为以160 s时间匀速关闭正车喷嘴阀,待舰船自然滑行降速至75%最大航速后,以5 s时间匀速开启4个倒车阀进行回汽制动时航速与时间的关系曲线。曲线3为以60 s时间匀速关闭正车喷嘴阀,同时以60 s时间匀速缓慢打开4个倒车阀至50%开度,倒车汽轮机以较低功率制动舰船,待舰船航速降至75%最大航速时以5 s时间完全打开倒车阀,倒车汽轮机以全功率制动舰船的关系曲线。从图7可以看出,回汽制动方式能迅速制动舰船,相对于自然滑行制动时间能缩短60%~70%,且在汽轮机强度允许范围内,倒车汽轮机回汽时刻越早,舰船制动时间就越短。
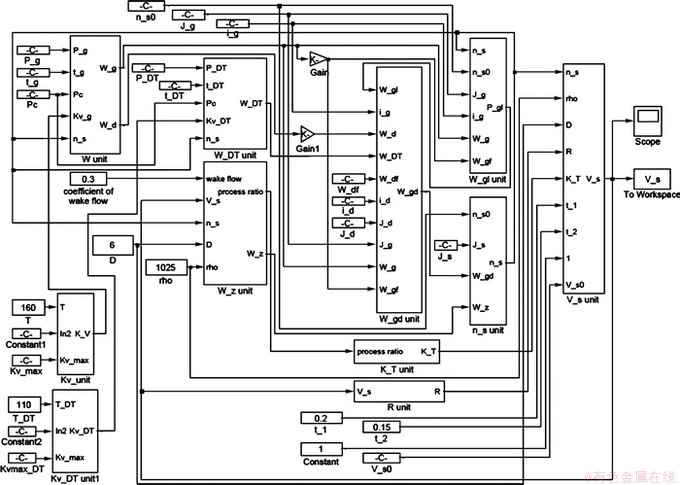
图4 回汽制动系统仿真模型
Fig.4 Simulation model of back-steam braking system
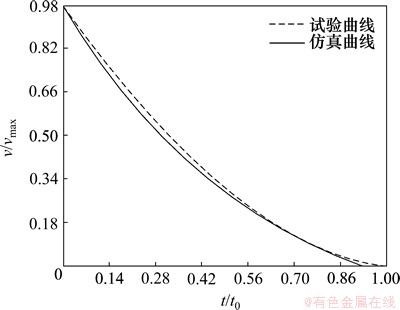
图5 关闭主机自然滑行制动时航速与时间的试验与仿真对比
Fig.5 Comparison of test and simulation for velocity and time in natural coasting braking with closed main engines
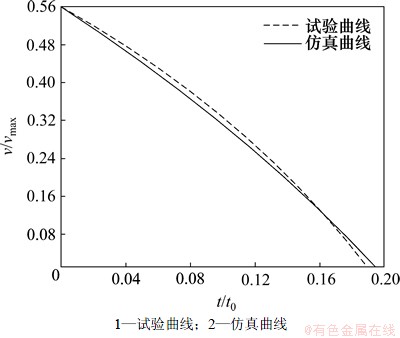
图6 回汽制动下航速与时间的试验与仿真对比
Fig.6 Comparison of test and simulation for velocity and time in back-steam braking system
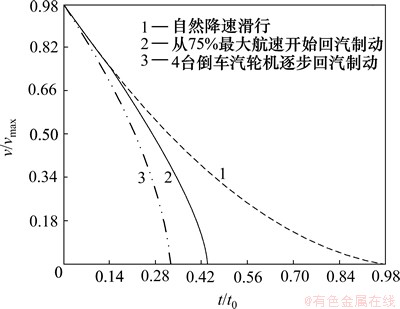
图7 以不同方式回汽制动时航速与时间的变化曲线
Fig.7 Curve of velocity-time in different back-steam braking systems
4 结论
(1) 建立蒸汽动力舰船回汽制动系统的联合数学模型,基于Matlab-Simulink对该模型进行数值仿真,并与试验结果进行比较。结果表明,仿真结果与试验结果偏差较小,该模型可以正确描述蒸汽动力舰船回汽制动过程,使得回汽制动技术的广泛使用成为可能。
(2) 采用回汽制动方法可以大幅提高蒸汽动力舰船的机动性。相对于舰船的传统制动方法,回汽制动效果更为显著,且回汽时刻越早,舰船制动时间就越短,最大能缩短约70%的制动时间。
参考文献:
[1] Piacentino A, Cardona F. On thermoeconomics of energy systems at variable load conditions: integrated optimization of plant design and operation[J]. Energy Conversion and Management, 2007, 48(3): 2341-2355.
[2] FU Ling, FU Zhongguang, BI Ke. The application of objective-oriented utility-based association rules in the operation optimization of the thermal power plant[C]. Hang Zhou: ICOPE 2007, 597-600.
[3] 田兆斐, 张志俭. 船舶饱和蒸汽轮机动态特性仿真[J]. 汽轮机技术, 2005, 47(2): 90-92.
TIAN Zhaofei, ZHANG Zhijian. Simulation on the dynamic characteristic of marine saturated steam turbine[J]. Turbine Technology, 2005, 47(2): 90-92.
[4] 田兆斐. 核动力装置二回路蒸汽系统仿真研究[D]. 哈尔滨: 哈尔滨工程大学核科学与技术学院, 2006: 55-59.
TIAN Zhaofei. Simulation on steam system of the secondary loop of nuclear-powered plant[D]. Harbin: Harbin Engineering University. College of Nuclear Science and Technology, 2006: 55-59.
[5] Zimmer G. Modelling and simulation of steam turbine processes: individual models for individual tasks[J]. Mathematical and Computer Modelling of Dynamical Systems, 2008, 14(6): 469-493.
[6] Fredrik H. A review on the use of gas and steam turbine combined cycles as prime movers for large ships[J]. Energy Conversion and Management, 2008, 49(5): 3468-3475.
[7] 相晓伟, 毛静儒, 孙弼, 等. 汽轮机调节阀全工况三维流场特性的数值研究[J]. 西安交通大学学报, 2006, 40(3): 289-293.
XIANG Xiaowei, MAO Jinru, SUN Bi, et al. Numerical investigation of flow characteristic of control valve of steam turbine in the entire range of operating mode[J]. Journal of Xi’an Jiao Tong University, 2006, 40(3): 289-293.
[8] Wagner W, Cooper J R, Dittmann A, et al. The IAPWS industrial formulation 1997 for the thermodynamic properties of water and steam[J]. Journal of Engineering for Gas Turbines and Power, 2000, 122(1): 150-182.
[9] HU Jimin, JIN Jiashan, YAN Zhiteng. Fluid-solid coupling numerical simulation of charge process in variable-mass thermodynamic system[J]. Journal of Central South University, 2012, 19(4): 1063-1072.
[10] ZHANG Chunfa, CUI Yinghong, YANG Wenbin, et al. Proof for part of the sttla flow experimental conclusion and the improvement of flugel formula[J]. Science in China: Series E, 2002, 45(1): 35-46.
[11] 张春发, 王惠杰, 宋之平, 等. 火电厂单元机组最优运行初压的定量研究[J]. 中国电机工程学报, 2006, 26(4): 36-40.
ZHANG Chunfa, WANG Huijie, SONG Zhiping, et al. Quantitative research of optimal initial operation pressure for the coal-fired power unit plant[J]. Proceeding of the Chinese Society for Electrical Engineering, 2006, 26(4): 36-40.
[12] Alireza B, Hari B. Vuthaluru. Estimation of performance of steam turbines using a simple predictive tool[J]. Applied Thermal Engineering, 2010, 30(5): 1832-1838.
[13] 周德佳, 王善铭, 柴建云. 基于Matlab-Simulink的舰船综合电力推进系统仿真[J]. 清华大学学报: 自然科学版, 2006, 46(4): 460-464.
ZHOU Dejia, WANG Shanming, CHAI Jianyun. Simulation of an integrated electrical ship propulsion system using Matlab-Simulink[J]. Journal of Tsinghua University: Science & Technology, 2006, 46(4): 460-464.
[14] 高键, 姜长生. 调距桨的舰船航速智能控制技术研究[J]. 南京航空航天大学学报, 2003, 35(2): 157-161.
GAO Jian, JIANG Changsheng. Intelligent control of marine speed based on controllable pitch propeller[J]. Journal of Nanjing University of Aeronautics & Astronautic, 2003, 35(2): 157-161.
[15] Christoph K, Frank C, George T. Optimization of combined cycle power plants using evolutionary algorithms[J]. Chemical Engineering and Processing, 2007, 46(6): 1151-1159.
(编辑 赵俊)
收稿日期:2012-06-20;修回日期:2012-09-11
基金项目:国家自然科学基金资助项目(10905093)
通信作者:朱泳(1986-),男,江苏靖江人,博士研究生,从事舰船动力及热力系统研究;电话:13517123482;E-mail: zhuyong198674@163.com

