DOI: 10.11817/j.issn.1672-7207.2018.02.014
基于滑移率的电子机械制动模糊滑模控制
彭晓燕,何磊,吕以滨
(湖南大学 机械与运载工程学院,汽车车身先进设计制造国家重点实验室,湖南 长沙,410082)
摘要:建立汽车电子机械制动系统及1/2车辆动力学模型。针对电子机械制动系统的不确定性和非线性问题,提出一种基于滑移率的电子机械制动模糊滑模控制算法用于实现常规制动和紧急制动。该算法结合车辆制动过程中前、后轴载荷的动态变化设计滑模等效控制量,采用模糊校正器调整滑模切换控制量。采用硬件在环实验验证该算法的有效性。研究结果表明:该算法与PID控制和滑模控制相比,能够快速平衡地达到目标值,具有较强的抗干扰能力,对各种路况及工况的适应性更好,对提高车辆制动的稳定性具有积极作用。
关键词:电子机械制动;滑移率;模糊滑模控制;硬件在环
中图分类号:U463.5 文献标志码:A 文章编号:1672-7207(2018)02-0360-11
Fuzzy sliding mode control based on vehicle slip ratio for electro-mechanical braking systems
PENG Xiaoyan, HE Lei, L Yibin
Yibin
(State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,
College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China)
Abstract: The model of the electro-mechanical brake(EMB) system and the half-vehicle dynamic model were established. Due to the fact that the EMB system is nonlinear and uncertain, a fuzzy sliding mode control(SMC) strategy based on wheel slip ratio for the EMB system was proposed, with both the normal and emergency braking conditions being taken into account. The equivalent control law of sliding mode controller was designed based on the variation of the front and rear axle load during the brake process, while the switching control law was adjusted by the fuzzy corrector. The hardware-in-loop(HIL) experiment was conducted to verify the validation of the developed methodology. The results show that the fuzzy SMC strategy has superior performance and better adaptability to various types of roads compared to PID control and SMC. It can make the target value more quickly and smoothly and has strong anti-interference ability. The fuzzy SMC has a positive effect on improving the stability of vehicle braking.
Key words: electro-mechanical brake; wheel slip ratio; fuzzy sliding mode control; hardware-in-loop
目前,采用线控制动(brake-by-wire, BBW)技术构建的电动汽车电控制动系统具有制动响应高效稳定、节省空间及便于整合其他功能模块等优点[1],极大地提高了车辆制动时的安全性能,成为车辆制动系统的研究热点。不同于电子液压制动(electro-hydraulic brake, EHB)系统,电子机械制动(electro-mechanical brake, EMB)系统是完全线控制动系统,它采用电机驱动制动器执行机构实现车辆制动,所有动作都由电子控制单元控制电机实现,因此,EMB系统对控制系统的设计提出了更高的要求[2]。轮胎滑移率对轮胎力的影响非常明显,通过控制滑移率可以控制轮胎的纵向力和侧向力;另外,滑移率的采集无需增加其他传感器,与制动器夹紧力等其他控制量相比更容易实现,因此,轮胎滑移率常作为汽车动力学控制系统的被控变量[3-5]。目前,防抱死制动系统(ABS)、电子制动力分配(EBD)和电子稳定性控制系统(ESC)等汽车主动安全的重要技术均采用滑移率作为被控对象,基于滑移率的控制方法也一直是近年来研究的热点。德国戴姆勒克莱斯勒公司最早与挪威科技大学合作研究了用于EMB系统的基于滑移率的增益调度控制方法[6]。CHOI[7]设计了监测后轮状态的方法估计ABS控制的最佳滑移率,并控制前轮滑移率跟随目标滑移率来实现ABS控制。DOUSTI等[8]设计了一组多模切换的EMB系统控制器来实现各种类型道路上的ABS控制,同时研制了一种多模切换观测器来估计不同路面的摩擦因数和最佳滑移率。然而,目前人们主要针对ABS这类紧急制动情况进行研究,而对常规制动的控制技术研究较少。为此,本文作者提出一种基于滑移率的EMB系统控制架构。在此结构中,常规制动工况与紧急制动工况都被考虑,并通过最佳滑移率辨识器进行路面辨识,得到不同路面下的最佳滑移率及附着系数。由于EMB系统的不确定性与非线性问题,很难建立一个准确的数学模型来进行描述,因此,控制器必须具有很强的鲁棒性以适应轮胎特性、制动器摩擦特性、路面条件、车辆负载等参数的变化。滑模控制(SMC)具有反应快速、对参数变化不敏感、鲁棒性强等特点,能很好地解决以上问题。TANELLI等[9-10]采用滑模控制方法设计了基于滑移率的EMB控制器,发现SMC控制器的控制性能以及对路面的适应性均优于PID控制。然而,现有研究在设计控制器时忽略了制动过程中车轴负载的变化,这将对控制器的性能研究造成不利影响;另外,SMC控制器存在的抖振问题会对控制精度和稳定性造成负面影响。为此,本文设计一种模糊滑模控制器来实现EMB系统基于滑移率的控制。该控制器结合车辆制动过程中前、后轴载荷的动态变化设计滑模等效控制量,并采用模糊校正器调整滑模切换控制量来削弱抖振现象。最后,在不同制动强度、初速度、路面条件下对控制器进行仿真对比,并通过硬件在环实验验证该算法的有效性。
1 EMB系统描述及建模
基于滑移率的EMB系统控制架构如图1所示。图1中:ω为车轮角速度,可以直接通过轮速传感器测量得到;v为车速;μ为制动力系数,表征地面纵向摩擦力与垂直载荷的比值; ,为驾驶员的目标制动强度;
,为驾驶员的目标制动强度; 为对应的制动减速度;g为重力加速度;λp为路面最佳滑移率;μp为峰值附着系数;λ*为控制目标滑移率;λ为实际滑移率;Ia为电机电枢电流;Tb为制动器输出力矩。v可以采用拓展卡尔曼滤波方法(EKF)进行估算[11-12],μ可以通过文献[13]中介绍的GPS与加速度传感器数据融合的方法进行估算,这种方法无需对制动器的输出力矩进行测量;λp和μp则通过最佳滑移率辨识器进行估计。假设这些状态量都可以通过观测得到,而且观测器的估计特性都已知。
为对应的制动减速度;g为重力加速度;λp为路面最佳滑移率;μp为峰值附着系数;λ*为控制目标滑移率;λ为实际滑移率;Ia为电机电枢电流;Tb为制动器输出力矩。v可以采用拓展卡尔曼滤波方法(EKF)进行估算[11-12],μ可以通过文献[13]中介绍的GPS与加速度传感器数据融合的方法进行估算,这种方法无需对制动器的输出力矩进行测量;λp和μp则通过最佳滑移率辨识器进行估计。假设这些状态量都可以通过观测得到,而且观测器的估计特性都已知。
由于EMB系统取消了制动踏板与制动器的直接连接,目前的研究大多数通过分析传统汽车的制动踏板与车辆减速度之间的关系,根据驾驶员产生的踏板力和位移,确定车辆所需的制动减速度及制动强度。本文按照文献[14]中设计的踏板力与车辆制动减速度的关系曲线,用制动强度z来表征驾驶员的制动意图。
根据文献[15],由于地面附着系数的限制,车辆实际上所能达到的最大制动减速度为 。若驾驶员需要紧急制动,此时目标制动减速度超过了最大制动减速度,即
。若驾驶员需要紧急制动,此时目标制动减速度超过了最大制动减速度,即 ,则对应的制动器制动力大于地面附着力,车轮将抱死,这将对车辆的制动稳定性造成不利影响。
,则对应的制动器制动力大于地面附着力,车轮将抱死,这将对车辆的制动稳定性造成不利影响。
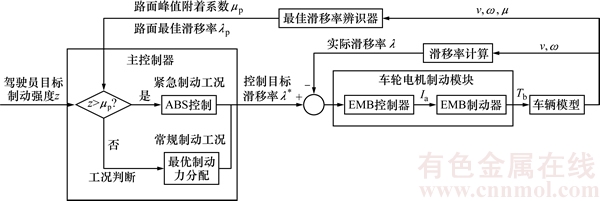
图1 基于滑移率的EMB控制系统架构图
Fig. 1 Diagram of EMB control system based on wheel slip ratio
对此,本文设计的主控制器通过比较z与μp进行工况判断,选择不同的制动力分配方法计算得到每个EMB控制器的控制目标λ*,既可以满足紧急制动的要求,又可以实现常规制动的控制。若 ,则车辆处于常规制动工况,主控制器根据z的要求,按照基于滑移率的最优制动力分配策略计算λ*;否则,车辆处于紧急制动工况,主控制器启动ABS功能,将λp作为λ*传给EMB控制器。EMB控制器则通过闭环控制实现系统λ跟随λ*的变化。
,则车辆处于常规制动工况,主控制器根据z的要求,按照基于滑移率的最优制动力分配策略计算λ*;否则,车辆处于紧急制动工况,主控制器启动ABS功能,将λp作为λ*传给EMB控制器。EMB控制器则通过闭环控制实现系统λ跟随λ*的变化。
1.1 1/2车辆模型
假设车辆在平直路面上制动,忽略车辆的空气阻力、滚动阻力矩和旋转质量减速时产生的惯性力矩,在左、右车轮受到的垂直载荷相等的前提下,可以通过建立1/2车辆模型表示其受力情况,如图2所示。
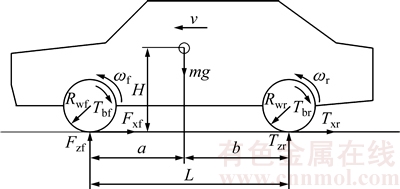
图2 1/2车辆动力学模型
Fig. 2 Half-vehicle dynamic model
车辆的纵向动力学方程为
 (1)
(1)
轮胎动力学方程则表示为
 (2)
(2)
式中:i=1,2,3,4,分别表示左前轮、右前轮、左后轮和右后轮;m为车辆质量; 为车辆的加速度;
为车辆的加速度; 为序号为i的车轮受到的地面纵向摩擦力;Ji为对应的车轮的转动惯量;
为序号为i的车轮受到的地面纵向摩擦力;Ji为对应的车轮的转动惯量; 为对应的车轮的角加速度;
为对应的车轮的角加速度; 为对应的车轮的滚动半径;
为对应的车轮的滚动半径; 为对应的车轮制动器的输出力矩。
为对应的车轮制动器的输出力矩。
地面纵向摩擦力很难通过直接测量得到,可以根据制动力系数的定义,用下式对进行估算:
 (3)
(3)
式中:μi为序号为i的车轮的制动力系数; 为对应的轮胎受到的地面法向反作用力,
为对应的轮胎受到的地面法向反作用力,
 (4)
(4)
式中:L为轴距;a和b分别为质心到前、后轴的距离;H为质心高度。
序号为i的车轮的滑移率λi为
 (5)
(5)
1.2 最佳滑移率辨识器模型
BURCKHARDT轮胎模型[16]采用指数函数和线性函数的组合来拟合试验结果,在忽略车辆速度变化和轮胎载荷影响的前提下,给出描述 的函数表达式[16]:
的函数表达式[16]:
 (6)
(6)
式中:c1,c2和c3为实验数据拟合参数,与路面状态有关,不同路面下的取值见文献[17]。
本文采用BURCKHARDT轮胎模型[16]构建最佳滑移率辨识器。用带工况参数的径向基(RBF)神经网络来逼近BURCKHARDT轮胎模型[16]中的非线性函数参数,用粒子群算法与结构化非线性参数优化算法相结合的混合参数优化方法辨识RBF网络工况参数;获得实时的μ和λ,与计算得到不同路况的曲线进行比较,辨识最接近的路面工况,得到实时路面最佳滑移率。详细计算过程见文献[18]。
1.3 EMB制动器模型
选用浮动钳盘式EMB制动器,其结构原理如图3所示[10],建立的模型包括驱动电机模型、行星齿轮机构模型、滚珠丝杠副模型和制动盘模型。

图3 EMB制动器结构原理图
Fig. 3 Principle diagram of EMB actuator
1.3.1 驱动电机模型
选用直流力矩电机作为EMB制动器的驱动电机。制动器的制动垫片与制动盘接触后,电机处于连续堵转状态下,此时的电机输出力矩为
 (7)
(7)
式中:Tdi为序号为i的车轮制动器的电机输出力矩;Tei为对应的电机电磁力矩;Tfi为对应的电机摩擦力矩。电磁力矩可以表示为
 (8)
(8)
式中:KTi为序号为i的车轮制动器的电机力矩系数;Iai为对应的电机电枢电流。
力矩电机在堵转时存在静摩擦力矩。在已知最大静摩擦力矩前提下,电机的摩擦力矩表示为
 (9)
(9)
式中: 为序号为i的车轮制动器最大静摩擦力矩。
为序号为i的车轮制动器最大静摩擦力矩。
将式(8)和(9)代入式(7),经整理得
 (10)
(10)
1.3.2 行星齿轮机构模型
本文采用行星齿轮系作为减速机构,将电机输出的力矩传递给滚珠丝杠副的丝杠。该机构的输出力矩可以表示为
 (11)
(11)
式中: 为序号为i的车轮制动器的行星齿轮机构输出力矩;jxi为对应的行星齿轮机构传动比;
为序号为i的车轮制动器的行星齿轮机构输出力矩;jxi为对应的行星齿轮机构传动比; 为对应的行星齿轮机构的机械效率。
为对应的行星齿轮机构的机械效率。
1.3.3 滚珠丝杠副模型
滚珠丝杠副将行星齿轮轴的旋转运动转换成丝杠螺母的直线运动,通过制动垫片对制动盘施加压力。制动垫片对制动盘作用产生的压力表示为
 (12)
(12)
式中: 为序号为i的车轮制动器的夹紧力;
为序号为i的车轮制动器的夹紧力; 为对应的滚珠丝杠副的机械效率;
为对应的滚珠丝杠副的机械效率; 为对应的丝杠导程。
为对应的丝杠导程。
1.3.4 制动盘模型
车辆制动时,制动盘与两侧的制动垫片发生摩擦,制动盘有效半径处的摩擦力产生摩擦力矩,即为制动器输出力矩。在已知制动盘有效半径和制动垫块摩擦系数的前提下,得到制动器输出力矩为
 (13)
(13)
式中: 为序号为i的车轮制动器的制动垫块摩擦因数;
为序号为i的车轮制动器的制动垫块摩擦因数; 为对应的制动盘有效半径。
为对应的制动盘有效半径。
将式(10)~(13)进行整理,得到直流力矩电机处于堵转状态时的EMB制动器输出力矩为
 (14)
(14)
式中: ,为序号为i的车轮制动器的输出力矩系数。
,为序号为i的车轮制动器的输出力矩系数。
2 EMB模糊滑模控制器设计
在汽车制动过程中,由于路面状况和行驶工况的变化、轮胎变形与磨损、机电作动器非线性伺服特性、测量延迟及测量噪声等因素的影响,使得线控制动系统具有时变、非线性及不确定性,难以精确建模[19]。滑模变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点,能有效地实现对滑移率的跟踪控制,但缺点是存在抖振问题,影响控制精度,甚至使系统产生振荡失稳[20-21]。本文利用滑模控制的强鲁棒性设计EMB控制器,同时为了削弱抖振现象,采用模糊控制方法设计模糊校正器,根据滑模到达条件调整切换控制量。模糊滑模控制器结构如图4所示。
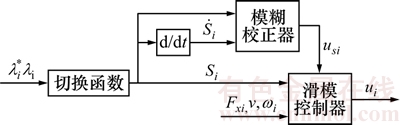
图4 模糊滑模控制器的控制结构图
Fig. 4 Diagram of fuzzy sliding mode controller
2.1 滑模控制器设计
将EMB制动器模型式(14)代入1/2车辆模型的动力学方程式(1)和(2)整理得
 (15)
(15)
将式(5)进行求导,并将式(15)代入得
 (16)
(16)
式中: 为序号为i的车轮的滑移率的导数;
为序号为i的车轮的滑移率的导数; ,为对应的EMB控制器的控制量。
,为对应的EMB控制器的控制量。
控制器通过滑模变结构控制算法调整ui,使跟踪误差 趋近于0。定义切换函数为
趋近于0。定义切换函数为
 (17)
(17)
按等速趋近律 设计滑模控制器时,切换函数应满足条件:
设计滑模控制器时,切换函数应满足条件:
 (18)
(18)
式中:si为序号为i的EMB控制器的切换函数; 为对应的切换函数的导数;
为对应的切换函数的导数; 为等速趋近律常数。
为等速趋近律常数。
满足式(18)也就满足了广义滑模条件,控制器就可以使系统按等速趋近律趋近切换面。此条件下设计滑模控制器的控制律为
 (19)
(19)
式中: 为序号为i的EMB控制器的等效控制量;
为序号为i的EMB控制器的等效控制量; 为对应的EMB控制器切换控制量,K为对应的切换增益。
为对应的EMB控制器切换控制量,K为对应的切换增益。
2.2 等效控制量求解
由于 ,对式(17)求导得
,对式(17)求导得
 (20)
(20)
和v无法直接测量得到,一般由观测器得到的估计值及其误差表示: 和
和 (其中,
(其中, 和
和 为观测器得到的估计值,
为观测器得到的估计值, 和
和 为观测器的估计误差)。假设观测器的估计特性是已知的,即
为观测器的估计误差)。假设观测器的估计特性是已知的,即 和
和 (其中,
(其中, 和
和 为观测器的估计误差的上限值)。本文在此基础上设计鲁棒性强的滑模控制器。
为观测器的估计误差的上限值)。本文在此基础上设计鲁棒性强的滑模控制器。
当系统沿着切换面运动时, 恒成立,将此条件代入式(20)求出等效控制量为
恒成立,将此条件代入式(20)求出等效控制量为
 (21)
(21)
由式(21)得到的等效控制量可以看成是当和均为0时的最佳控制量。
2.3 模糊校正器设计
由于和v的不确定性,需要引入切换控制量 以保证系统在切换平面之外时能到达切换面。可以根据和v的定义假设系统的控制误差为
以保证系统在切换平面之外时能到达切换面。可以根据和v的定义假设系统的控制误差为
 (22)
(22)
并且可以确定该不确定源是有界的,即
 (23)
(23)
式中:fi为序号为i的EMB控制器的控制误差; 为对应的控制误差的上限值。
为对应的控制误差的上限值。
根据广义滑模条件,切换控制量应满足下列条件:
 (24)
(24)
由于切换控制量是由模型不确定性与外部扰动的上界函数确定的,因此,常常造成系统高频抖振[20],对此,本文采用模糊校正器来代替切换控制。模糊校正器的输入变量为切换函数si及其对时间的导数,输出变量为切换控制量。
将输入变量的物理论域量化到模糊集合论域{-1,0,1},将输出变量的物理论域量化到模糊集合论域{-4,-3,-2,-1,0,1,2,3,4}。根据切换函数si及其对时间的导数的实际范围和切换控制量usi的实际范围来确定量化因子的取值。
输入变量的模糊语言描述为负(N)、零(ZE)、正(P)。隶属度函数选择为三角函数,如图5所示。
输出变量的模糊语言描述为负高(NH)、负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB)、正高(PH)。隶属度函数选择为三角函数,如图6所示。
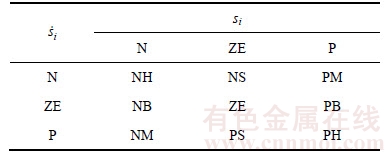
模糊控制规则的设计应该使得到的控制量usi满足式(24),采用如表1所示模糊控制规则表。
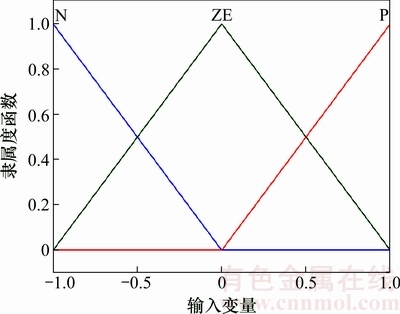
图5 输入变量的隶属度函数
Fig. 5 Membership function of input variables
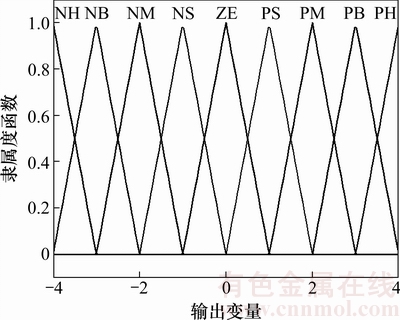
图6 输出变量的隶属度函数
Fig. 6 Membership function of output variable
表1 模糊控制规则表
Table 1 Fuzzy control rules
2.4 稳定性分析
定义Lyapunov函数为
 (25)
(25)
将式(20)代入式(25)并求导,得
 (26)
(26)
将式(19),(21)和(22)代入式(26),得
 (27)
(27)
式中: ,为正数。将式(23)和(24)代入式(27),得
,为正数。将式(23)和(24)代入式(27),得
 (28)
(28)
由此证明了该模糊滑模控制器的稳定性。
3 仿真分析
在MATLAB/Simulink中建立1/2车辆模型、最佳滑移率辨识器模型、EMB制动器模型以及FSMC控制器模型,由此搭建的仿真系统模型如图7所示。
在附着系数不同的平直路面上,选取不同的初始速度及制动强度,将所设计的FSMC控制器与PID和传统SMC进行仿真对比。
3.1 干沥青路面仿真
在平直的干沥青路面上,车辆分别以车速100和40 km/h行驶,当t=0 s时开始仿真,分别按照3种不同的目标制动强度即z为0.9,0.5和0.3进行制动,当车速降到10 km/h时终止仿真。
根据式(17)对切换函数的定义,切换面的跟踪情况可以通过滑移率反映出来。由于在单一路面上直道制动时左、右车轮的滑移率完全相等,前后车轮的滑移率变化规律相同,因此,以左前轮为例对滑移率的变化进行记录。图8所示为3种不同控制方法下的车轮滑移率。车辆制动减速度是评定制动效能的指标之一,图9所示为3种不同控制方法下的车辆制动减速度。
3.2 雪地路面仿真
在平直的雪地路面上,车辆以车速v=40 km/h行驶,当t=0 s时开始仿真,分别按照z为0.3和0.1的目标制动强度进行制动,当车速降到10 km/h时终止仿真。在雪地路面上,3种不同控制方法下的左前轮滑移率和车辆制动减速度分别如图10和图11所示。
3.3 变路面仿真
车辆在平直的路面上分别以车速100和40 km/h行驶,当t=0 s时首先在湿沥青路面上分别按照z为0.9和0.3的目标制动强度进行制动,当t=0.5 s时转入干沥青路面,当车速降到10 km/h时终止仿真。在变路面工况下,3种不同控制方法下的左前轮滑移率和车辆制动减速度分别如图12和图13所示。
3.4 仿真结果分析
由式(4)可知,车辆前后轴的载荷偏移量是随车辆制动减速度变化的。从图9可以看出:选取不同的制动强度时,车辆的制动减速度不同,前后轴的载荷偏移量也不同。分析图8可知:在不同制动强度下,本文设计的FSMC算法的动态特性均最优,该算法对前后轴载荷的动态变化的适应性更好。
通过对比分析图8(d)和图10(a)可以发现:在干沥青路面上,3种控制算法的滑移率均无超调,其中FSMC算法到达稳态的时间最短;而在雪地路面上,仅FSMC算法的滑移率仍保持无超调且快速稳定,其他2种控制策略均出现超调,这说明FSMC算法对不同附着系数路面的适应性更好。对比图9(d)和图11(a)可以发现:在2种路面上,车辆制动强度相同,但制动减速度不同。这是因为本文设计的EMB控制系统可识别出不同的路面,选择不同的制动工况,产生不同的制动力。
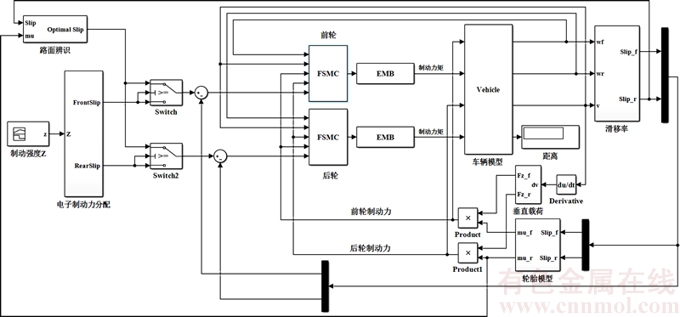
图7 FSMC系统仿真模型
Fig. 7 FSMC system simulation model
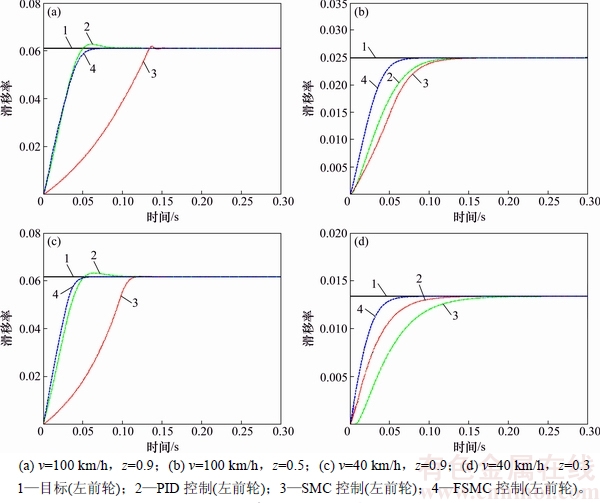
图8 干沥青路面上的滑移率变化曲线
Fig. 8 Curves of wheel slip ratio on dry asphalt road
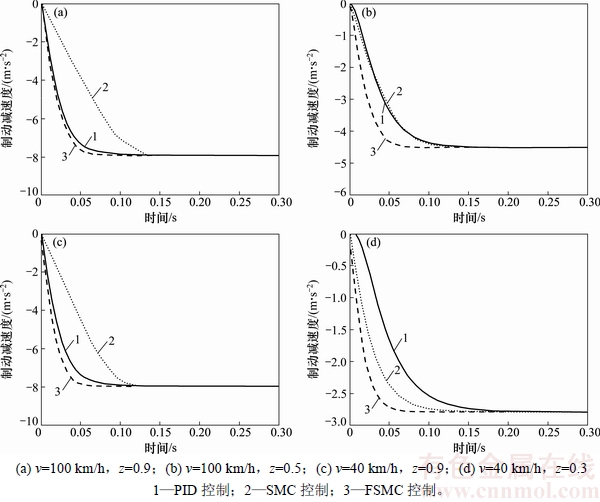
图9 干沥青路面上的制动减速度变化曲线
Fig. 9 Curves of braking deceleration on dry asphalt road
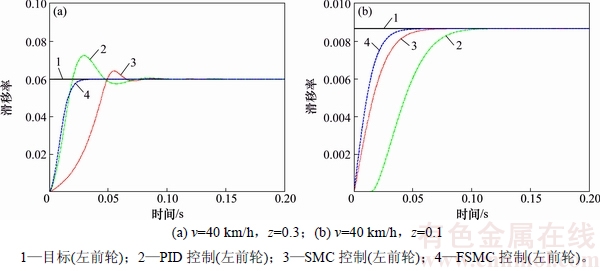
图10 雪地路面上的滑移率变化曲线
Fig. 10 Curves of wheel slip ratio on snow road
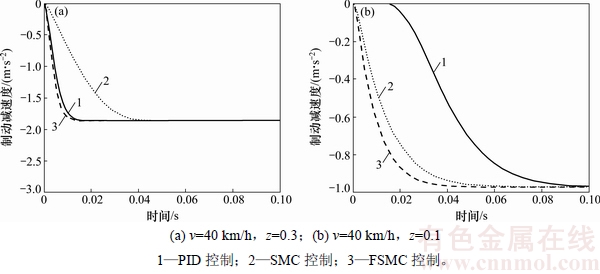
图11 雪地路面上的制动减速度变化曲线
Fig. 11 Curves of braking deceleration on snow road
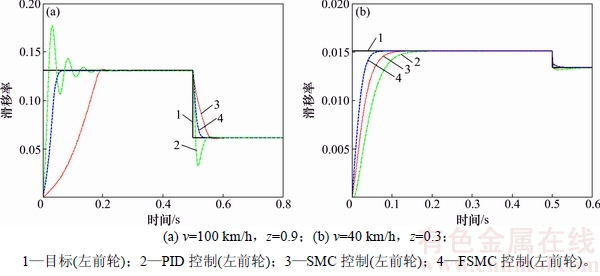
图12 变路面仿真的滑移率变化曲线
Fig. 12 Curves of wheel slip ratio on variable road
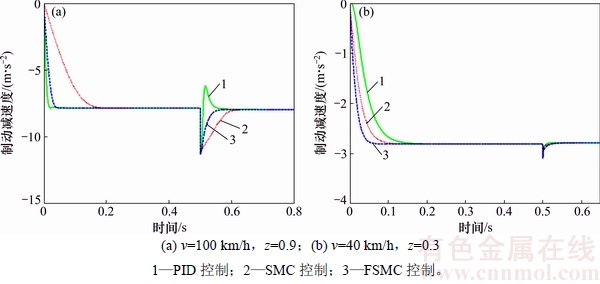
图13 变路面仿真的制动减速度变化曲线
Fig. 13 Curves of braking deceleration on variable road
从图12可以看出:在路面变化时,控制系统会实时调整控制目标滑移率,FSMC算法的滑移率能够稳定、快速地达到新的稳态值,而PID和SMC算法的滑移率会出现比较严重的震荡或是响应滞后的问题,这说明FSMC策略的鲁棒性更好。从图13(a)可知:车辆在湿沥青路面上的制动减速小于干沥青路面上的制动减速。这是由于此时湿沥青路面的峰值附着系数小于目标制动强度所需的路面附着系数,系统进入紧急制动模式。从图13(b)可知:车辆始终处于常规制动模式,制动减速度保持不变,FSMC算法在扰动时能最快地回稳,这对提高车辆制动的稳定性具有积极作用。
4 硬件在环实验
4.1 实验方案
为了调试EMB车轮电机制动模块FSMC控制器的参数并验证其实时性,搭建基于dSPACE为实时仿真系统的EMB硬件在环实验平台,如图14所示。图14中,主机负责编写程序和数据分析,dSPACE实时仿真系统负责运行实时车辆模型,接口系统负责进行信号采集与输出,主控制器负责进行制动力分配,计算目标滑移率。车轮电机制动模块包括EMB控制器、驱动器、EMB制动器、夹紧力传感器等,它负责控制电机实现夹紧运动,获得对应的制动夹紧力。控制器之间采用FlexRay总线通信。
4.2 EMB制动器特性测量实验
本实验采用自行软件开发的EMB控制器与电机驱动电路给EMB制动器电机输入不同的电流,电机带动执行机构使制动器夹紧制动盘,由夹紧力传感器测量对应的夹紧力。测量得到EMB制动器特性曲线如图15所示。
从图15(a)可见:EMB制动器电机的电枢电流与EMB控制器输出的PWM占空比之间的关系可以设为分段函数,分别为占空比≤0.6和占空比>0.6,其中每段曲线均采用不同的线性函数拟合。从图15(b)可见:EMB制动器的输出夹紧力与EMB制动器电机的电枢电流之间满足线性关系,由于静摩擦力矩存在,在电枢电流≤2.5 A时,EMB制动器的输出夹紧力不会随着电枢电流增大而增大。
4.3 算法实时性实验
根据线控系统应用的要求,电机闭环控制周期应小于2 ms[22]。为了验证所设计算法的实时性,采用MC9S12XF512控制芯片进行EMB控制算法软件开发,通过示波器对设计的控制算法的控制周期进行测量,得到控制周期为1.57 ms,满足实时性要求。
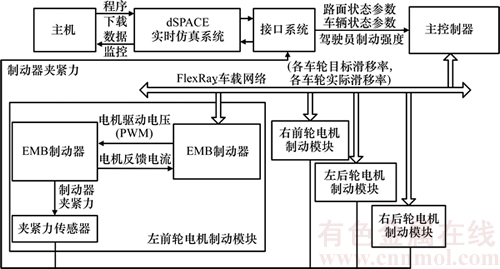
图14 EMB硬件在环实验台结构图
Fig. 14 Diagram of EMB hardware-in-loop test system
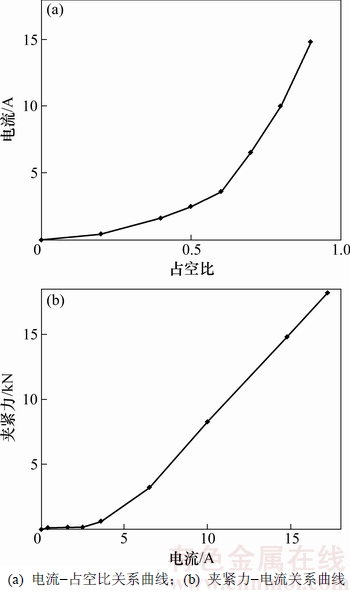
图15 EMB制动器特性曲线
Fig. 15 Characteristic curves of EMB actuator
5 结论
1) 基于滑移率的EMB控制系统分析了常规制动与紧急制动的控制原理,设计了2种不同制动模式下的控制功能。
2) 建立的1/2车辆动力学模型能描述制动过程中的前后轴载荷偏移,并应用于EMB模糊滑模控制器的设计。
3) 采用模糊校正器来调整滑模切换控制量,能有效地抑制滑模控制器的高频抖振问题。
4) 与PID和一般滑模控制相比,本文设计的FSMC控制器控制性能更好,对路面以及工况变化的适应性更强。硬件在环实验结果表明该FSMC控制器满足实时性要求。
参考文献:
[1] ZHANG Lipeng, LI Liang, LIN Cheng, et al. Coaxial-coupling traction control for a four-wheel-independent-drive electric vehicle on a complex road[J]. Proceedings of the Institution of Mechanical Engineers. Part D: Journal of Automobile Engineering, 2014, 228(12): 1398-1414.
[2] 宗长富, 李刚, 郑宏宇, 等. 线控汽车底盘控制技术研究进展及展望[J]. 中国公路学报, 2013, 26(2): 160-176.
ZONG Changfu, LI Gang, ZHENG Hongyu, et al. Study progress and outlook of chassis control technology for x-by-wire automobile[J]. China Journal of High Way and Transport, 2013, 26(2): 160-176.
[3] 王治中, 于良耀, 宋健. 基于制动系统的汽车车轮滑移率控制研究现状[J]. 汽车工程, 2014, 36(1): 81-87.
WANG Zhizhong, YU Liangyao, SONG Jian. The status quo of research on vehicle wheel slip control based on brake system[J]. Automotive Engineering, 2014, 36(1): 81-87.
[4] 李顶根, 张绿原, 何保华. 基于滑移率的汽车电子机械制动系统的模糊控制[J]. 机械工程学报, 2012, 48(20): 121-126.
LI Dinggen, ZHANG Lüyuan, HE Baohua. Fuzzy control based on vehicle slip-ratio for electro-mechanical braking systems[J]. Journal of Mechanical Engineers, 2012, 48(20): 121-126.
[5] IVANOV V, SHYROKAU B, SAVITSKI D, et al. Design and testing of abs for electric vehicles with individually controlled on-board motor drives[J]. SAE International Journal of Passenger Cars: Mechanical Systems, 2014, 7(2): 902-913.
[6] JOHANSEN T A, PETERSEN I, KALKKUHL J, et al. Gain-scheduled wheel slip control in automotive brake systems[J]. IEEE Transactions on Control Systems Technology, 2003, 11(6): 799-811.
[7] CHOI S B. Antilock brake system with a continuous wheel slip control to maximize the braking performance and the ride quality[J]. IEEE Transactions on Control Systems Technology, 2008, 16(5): 996-1003.
[8] DOUSTI M, BASLAMISLI S C, ONDER E T, et al. Design of a multiple-model switching controller for ABS braking dynamics[J]. Transactions of the Institute of Measurement and Control, 2015, 37(5): 582-595.
[9] TANELLI M, SARTORI R, SAVARESI S M. Combining slip and deceleration control for brake-by-wire control systems:a sliding-mode approach[J]. European Journal of Control, 2007, 13(6): 593-611.
[10] 彭晓燕, 陈昌荣, 章兢. 电子机械制动系统的滑模控制研究[J]. 湖南大学学报(自然科学版), 2010, 37(8): 35-39.
PENG Xiaoyan, CHEN Changrong, ZHANG Jing. Study of sliding mode control for electromechanical brake systems[J]. Journal of Hunan University (Natural Sciences), 2010, 37(8): 35-39.
[11] 卜未琦. 全线控纯电动汽车行驶状态估算与路面识别[D]. 吉林: 吉林大学汽车工程学院, 2014: 13-27.
BU Weiqi. State estimation and road identification for a full drive-by-wire electric vehicle[D]. Jilin: Jilin University. College of Automotive Engineering, 2014: 13-27.
[12] 陈瑶, 李以农, 韩家伟. 基于扩展卡尔曼滤波的轮毂电机驱动电动汽车状态估计[J]. 汽车工程学报, 2015, 5(1): 16-22.
CHEN Yao, LI Yinong, HAN Jiawei. State estimation of in-wheel motor electric vehicle based on extended Kalman filter[J]. Chinese Journal of Automotive Engineering, 2015, 5(1): 16-22.
[13] RAJAMANI R, PHANOMCHOENG G, PIYABONGKARN D, et al. Algorithms for real-time estimation of individual wheel tire-road friction coefficients[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6): 1183-1195.
[14] 黄源. 线控制动系统制动力分配策略研究[D]. 长沙: 湖南大学机械与运载工程学院, 2011: 31-33.
HUANG Yuan. Study of brake force distribution method for brake-by-wire system[D]. Changsha: Hunan University. College of Mechanical and Vehicle Engineering, 2011: 31-33.
[15] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009: 90-97.
YU Zhisheng. Automobile theory[M]. 5th ed. Beijing: China Machine Press, 2009: 90-97.
[16] BURCKHARDT M. Fahrwerktechnik: radschlup-fregel- systeme[M]. Würzburg: Vogel-Verlag, 1993: 39-45.
[17] KIENCKE U, NIELSEN L. Vehicle modelling[M]. Heidelberg, Berlin: Springer, 2005: 15-19.
[18] 彭晓燕, 章兢, 陈昌荣. 基于RBF神经网络的最佳滑移率在线计算方法[J]. 机械工程学报, 2011, 47(14): 108-113.
PENG Xiaoyan, ZHANG Jing, CHEN Changrong. Calculation of RBF neural network based optimal slip ratio[J]. Journal of Mechanical Engineers, 2011, 47(14): 108-113.
[19] ZHANG Xiangwen, XU Yong, PAN Ming, et al. A vehicle ABS adaptive sliding-mode control algorithm based on the vehicle velocity estimation and tyre/road friction coefficient estimations[J]. Vehicle System Dynamics, 2014, 52(4): 475-503.
[20] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418.
LIU Jinkun, SUN Fuchun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418.
[21] 刘柏楠, 郭洪艳, 余如, 等. 汽车防抱死制动系统的滑模变结构控制器设计[J]. 吉林大学学报(信息科学版), 2015, 33(1): 19-25.
LIU Bainan, GUO Hongyan, YU Ru, et al. Design of sliding mode variable structure controller for anti-lock braking system[J]. Journal of Jilin University (Information Science Edition), 2015, 33(1): 19-25.
[22] HEINER G, THURNER T. Time-triggered architecture for safety-related distributed real-time systems in transportation systems[C]//Fault-Tolerant Computing, IEEE Computer Society. München, Germany, 1998: 402-407.
(编辑 陈灿华)
收稿日期:2017-01-29;修回日期:2017-03-22
基金项目(Foundation item):国家自然科学基金资助项目(51575167)(Project(51575167) supported by the National Natural Science Foundation of China)
通信作者:彭晓燕,教授,从事汽车电子与控制研究;E-mail:xiaoyan_p@126.com

