基于神经元的异步电机直接转矩控制系统速度辨识
高金生,高宏洋,喻寿益
(中南大学 信息科学与工程学院,湖南 长沙,410083)
摘 要:为避开传统的模型参考自适应(MRAS)方法需要求解反馈增益矩阵的问题,在直接转矩控制理论基础上,基于DSVM-DTC系统,在静止两相α-β坐标系下建立异步电机数学模型,推导出定子电流状态方程,并转化为带有5个输入节点、1个输出节点的神经元定子电流自适应辨识可调模型。采用Window-Hoff学习规则,推导出速度辨识公式,把辨识出的速度估计值反馈回可调模型中,在线修改可调模型参数,使其输出的定子电流估计值逼近于实时检测的定子电流,产生自适应性,提高定子电流和电机转速的辨识精度。最后,使用37 kW异步牵引电机参数在Matlab/Simulink软件平台上进行仿真。仿真结果表明:辨识转速能够准确地跟踪实际转速,动态响应性能好,尤其当参数发生突变时,系统具有很好的鲁棒性,并且实现简单。
关键词:神经元;转速辨识;DSVM;直接转矩控制
中图分类号:TM301.2 文献标识码:A 文章编号:1672-7207(2009)05-1367-07
Speed identification in direct torque control system of
induction motor based on neuron
GAO Jin-sheng, GAO Hong-yang, YU Shou-yi
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: In order to avoid solving the problems of obtaining feedback gain matrix in traditional model reference adaptive system (MRAS), the asynchronous motor mathematical model was established in stator α-β coordinate system based on direct torque control (DTC) theory, discrete space vector modulation (DSVM)-DTC system and stator current equation were gained according to this model and then the equation was transformed into neural element with five input nodes, and an output node as stator current adaptive identification modules. According to speed identification formula, the speed of motor was real-time estimated and transferred back to adjustable model whose parameters were modified and made close to the real value. Finally, the simulation was made in the Matlab/Sinulink using parameters of 37 kW asynchronous motors. The results show that the identified speed can accurately track the actual speed and perform good dynamic response. When system parameters change, the system has good robustness and is easy for application.
Key words: neuron; speed identification; discrete space vector modulation (DSVM); direct torque control
在异步电机直接转矩控制(DTC)系统中,为了提高系统的静态和动态性能,采用速度闭环控制,由速度传感器检测电机的速度。但是,安装速度传感器会降低系统可靠性,增大电机体积,增加系统成本。无速度传感器控制技术已成为目前交流传动的研究热 点[1-2]。李磊等[3-4]应用模型参考自适应(MRAS)速度估计方法,虽然实现了速度的闭环,但其参考模型和可调模型均含有电机参数。在实际运行中,电机参数变化会影响速度估计的精度,而且该方法需要引入和求解反馈增益矩阵,给模型建立和参数计算带来不便。此外,一般无速度传感器转速辨识方法多采用转子磁链作为转速辨识模型的状态变量,Lascu等[5-6]在直接转矩控制中,不是以转子磁场定向。由于转子磁链计算精度受转子参数变化的影响很大,在实际应用中,可能产生计算误差,为此,Kukolj等[7-8]利用神经网络对非线性函数的映射能力实现转速辨识,降低了对电动机参数的依赖,但需要大量的样本离线训练神经网络,使系统实现较困难。在此,本文作者基于自适应控制原理,在直接转矩控制(DTC)系统中采用二层神经元结构分别构造定子电流与速度辨识单元。根据电动机定子电流实际值和经神经网络得出的定子电流估计值之间的误差,实时调整网络权值,并实现转速辨识。最后,在Matlab/Simulink环境下仿真,并对仿真结果进行分析。
1 异步电机数学模型
在定子静止两相坐标系下,异步电机的磁链方程描述为[9]:

异步电动机的电压方程为:

由式(1)和(2)可得异步电机电压电流方程:

机电动力学方程为:
式(1)~(4)可作为异步电机参考模型。
2 基于神经元的定子电流辨识和转速辨识
静止两相α-β坐标系下,由异步电机数学模型(1)和(3)可推出定子电流状态方程[10]:

式(5)可作为定子电流的估计模型。应用后向差分法对(5)式进行离散化,得:

式(6)可表示为:
离散化后的定子电流估计方程可以看作神经元结构。该神经元结构有5个输入节点和1个输出节点。w1,w2,w3,w4和w5分别为各节点的权值。当采样周期确定后,w1,w3和w5相对于转速ωr变化极其缓慢,在转速变化过程中可当作定值处理。而在w2和w4中,除含有电机固定参数外,还包含转速ωr,其值可变。因此,通过在线调整ωr,就可以改变w2和w4,从而实时修改定子电流的估计值,辨识出正确的定子电流,同时,也实现转速的在线辨识。
下面推导基于神经元的转速辨识公式。由式(7),在k组采样输入下神经元的输出为:


转速辨识单元结构如图1所示。

图1 转速辨识单元
Fig.1 Unit of speed identification
3 速度辨识系统
由式(16)可以看出,计算转速估计值时,除要输入定子电流外,还要输入定子磁链值。而且直接转矩控制的关键是精确获得定子磁链。
针对传统异步电机直接转矩控制系统采用纯积分的电压模型作为磁链观测器,获得理想的定子磁链较困难,而且存在转矩脉动等缺点,依据文献[13],采用基于离散空间矢量调制(DSVM)技术的DTC系统。转速辨识系统结构如图2所示。
基于离散空间矢量调制技术,利用合成的19种电压矢量(如图3所示),使每一扇区可供选择的电压矢量数增加,既可以获得较好的定子磁链轨迹,又可以提高转矩调节器的控制精度。

图2 转速辨识系统结构
Fig.2 Structure of speed identification system

图3 采用DSVM技术合成电压空间矢量
Fig.3 Synthesized voltage vector obtained using DSVM technique
采用电压矢量Un(n为磁链所处的扇区),可把每个扇区分为“+”和“-”2个对等部分,并施加不同的电压矢量。假设定子磁链位于扇区1(分为“1+”和“1-”2部分),如图4所示。当ψs处于扇区“1-”部分时,要增加定子磁链与转矩可使用工作电压矢量U1代替U2;当ψs处于扇区“1+”部分时,要增加磁链与转矩,选择使用电压矢量U2。由此可得到优化后新的开关表,如表1所示[14]。其中,磁链调节器采用2级滞环调节,输出磁链控制信号Cψ为-1或1。考虑到转矩需要动态响应快,采用5级滞环调节,输出转矩控制信号CT分别为-2,-1,0,1,2。
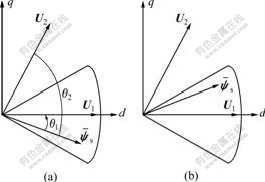
(a) 位于扇区1-;(b) 位于扇区1+
图4 第1扇区磁链与电压矢量U1和U2作用示意图
Fig.4 Respective demonstration of stator flux vector and voltage U1 and U2 in the first sector
表1 改进后的DSVM-DTC开关
Table 1 Switch of modified DSVM-DTC

4 仿真结果及分析
在Matlab/Simulink环境下,对此方法进行仿 真,选用电机的参数为:额定功率Pe=37 kW,定子电阻Rs=0.092 ?,转子电阻Rr=0.015 ?,额定转速Ne=787 r/min,定子电感Ls=0.028 H,转子电感Lr=0.028 H,定转子互感Lm=0.027 H,电机极对数Pn=3,转动惯量Jn=0.8 kg?m2,额定转矩Te=650 N・m。给定磁链为1 Wb,转矩容差为1 N?m,磁链容差为0.02 Wb。
当采用不同的采样周期T和学习速率η时,系统的响应时间和精度不尽相同。对于采样时间T,当学习速率η确定时,采样时间T越大,系统响应越慢,精度越低,反之,响应越快,精度越高。经反复试验,最终确定在所用电机参数和现有实验设备的条件下,选用采样时间T=0.1 ms,能够满足系统的精度与速度要求,无需再减小采样时间,否则,会增大系统计算量,加大系统开销。对于学习速率η,当采样时间T确定时,η越小,得出的结果精度越高,但系统的响应时间越长,反之,精度越低,响应时间越短。当转速为700 r/min时,学习速率η与给定转速的响应时间和精度(误差百分比)的关系特性曲线如图5所示。在其他转速条件下,该特性曲线与此相似。学习速率取η=0.002为宜。
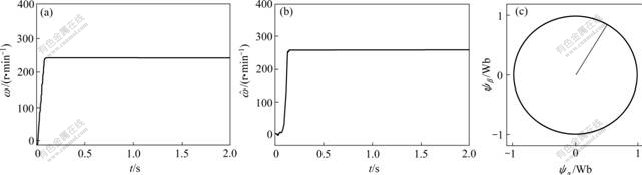
图6和图7所示分别为在给定转速n为700 r/min和250 r/min时,电机转速、辨识转速和定子磁链曲线。可以看出,应用本方法辨识得到的转速接近于给定值,在高速和低速下,稳态运行时转速辨识误差分别为1.36%和2.23%,且运行稳定。定子磁链轨迹接近圆形,系统达到稳定状态时间分别为0.24 s和0.11 s。图8所示是在给定负载转矩为200 N・m,转速给定值从400 r/min阶跃到600 r/min时的转矩响应。从图8可以看出,在转速阶跃前、后,稳态运行时转速辨识精度分别为1.67%和1.92%。当转速发生阶跃时,转矩出现短时间上升,最后仍回落到预设值。这表明系统转矩响应特性良好,运行稳定。

(a) 学习速率η与响应时间的关系;(b) 学习速率η与精度的关系
图5 当ωr=700 r/min时系统响应时间和精度与学习速率η的关系特性曲线
Fig.5 Characteristic curves of system response time and accuracy about learning rate η under ωr=700 r/min

(a) 给定电机转速;(b) 辨识转速;(c) 定子磁链
图6 给定转速700 r/min时辨识转速和定子磁链曲线
Fig.6 Curves of stator flux and identified speed under given speed of 700 r/min
(a) 给定电机转速;(b) 辨识转速;(c) 定子磁链
图7 给定250 r/min时辨识转速和定子磁链曲线
Fig.7 Curves of stator flux speed and identified speed under given speed of 250 r/min
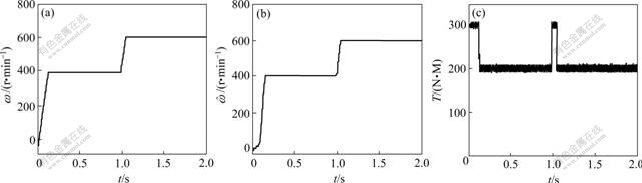
(a) 给定电机转速;(b) 辨识转速;(c)转矩变化曲线
图8 转速从400 r/min突变到600 r/min阶跃时转速变化和转矩变化曲线
Fig.8 Curves of identified speed and torque response when speed of motor changes from 400 r/min to 600 r/min
5 结 论
a. 提出了采用基于神经元的异步电机转度辨识方法, 该方法与传统MRAS方法相比,计算简单,无需计算反馈增益矩阵,便于实现。
b. 建立了电流与转速自适应辨识神经元网络,利用辨识出的转速在线修改可调模型,自适应性强,电流与转速辨识精度提高。
c. 采用基于神经元方法辨识出的转速可以跟踪实际的电机转速,且定子磁链轨迹趋近于圆形,系统运行稳定。
参考文献:
[1] 李 夙. 异步电机直接转矩控制[M]. 北京: 机械工业出版社, 1998: 100-109.
LI Su. Induction motor direct torque control[M]. Beijing: Machinery Industry Press, 1998: 100-109.
[2] 姬志艳, 李永东. 无速度传感器异步电机直接转矩控制系统的研究[J]. 电工技术学报, 1997, 4(2): 32-36.
JI Zhi-yan, LI Yong-dong. Research on speed sensor less asynchronism motor direct torque control system[J]. Trans of China Electro Technical Society, 1997, 4(2): 32-36.
[3] 李 磊, 胡育文. 新型速度自适应磁链观测器在直接转矩控制中的应用[J]. 东南大学学报, 2001, 33(2): 103-107.
LI Lei, HU Yu-wen. The application of new type of speed adapt flux observer to direct torque control[J]. Journal of Southeast University: Natural Science Edition, 2001, 33(2): 103-107.
[4] Lee J S, Takeshita T. Stator flux oriented sensorless induction motor drive for optimum low-speed performance[J]. IEEE Transaction on Industry Application, 1997, 33(5): 1170-1176.
[5] Lascu C. A modified direct torque control for induction motor sensorless drive[J]. IEEE Trans on Ind Application, 2000, 36(7): 123-127.
[6] 张海龙, 张爱玲, 崔江霞. 基于MRAS方法的无速度传感器直接转矩控制系统的研究[J]. 电力学报, 2005, 20(2): 121-124.
ZHANG Hai-long, ZHANG Ai-ling, CUI Jiang-xia. Study of speed sensorless direct torque control system based on MRAS[J]. Journal of Electric Power, 2005, 20(2): 121-124.
[7] Kukolj D. Design of the speed controller for sensorless electric drives based on AI techniques a comparative study[J]. Elsevier Science Artificial Intelligence in Engineering, 2000, 14(3): 165-174.
[8] Huang S. Sensorless speed identification of vector-controlled induction drives via neural network based estimation[J]. Elsevier Electric Power Systems Research, 1998, 48: 1-10.
[9] 粟 梅, 许心东, 张泰山, 等. 双级矩阵变换器驱动异步电动机的特性分析[J]. 中南大学学报: 自然科学版, 2005, 36(4): 658-663.
SU Mei, XU Xin-dong, ZHANG Tai-shan, et al. Performance analysis of two-stage matrix converter driven asynchronous motor[J]. Journal Central South University: Science and Technology, 2005, 36(4): 658-663.
[10] 李 斌, 王 萍. 基于DSP的无速度传感器直接转矩控制系统[J]. 微电机, 2004, 37(3): 3-5.
LI Bing, WANG Ping. Study of speed-sensorless direct torque control system on DSP[J]. Micromotors, 2004, 37(3): 3-5.
[11] 孙桂玲, 金 镇. 基于LMS算法自调整模糊温度控制器的仿真研究[J]. 系统仿真学报, 2006, 18(11): 3108-3114.
SUN Gui-ling, JIN Zhen. Simulation research of adaptive fuzzy temperature controller based on LMS[J]. Acta Simulata Systematica Sinica, 2006, 18(11): 3108-3114.
[12] 曲永印, 邵世煌. LMS算法的自适应逆控制变频调速系统[J]. 辽宁工程技术大学学报, 2006, 25(3): 396-399.
QU Yong-yin, SHAO Shi-huang. Self adaptive inverse control variable frequency speed control system based on LMS algorithm[J]. Journal of Liaoning Technical University, 2006, 25(3): 396-399.
[13] Domenico C, Giovanni S, Angelo T. Implementation of a direct torque control algorithm for Induction motors based on discrete space vector modulation[J]. IEEE Trans on Power Electronics, 2000, 15(4): 769-777.
[14] 奚国华, 胡卫华, 喻寿益, 等. 一种改善直接转矩控制低速性能的DSVM改进策略[J]. 电气传动, 2007, 37(9): 11-14.
XI Guo-hua, HU Wei-hua, YU Shou-yi, et al. A low speed Improved strategy based on DSVM in the direct torque control of an induction motor[J]. Electric Drive, 2007, 37(9): 11-14.
基金项目:国家高技术研究发展计划(“863”计划)项目(2006AA042181)
收稿日期:2008-08-10;修订日期:2008-11-09
通信作者:喻寿益(1940-),男,江西南昌人,教授,博士生导师,从事自适应控制,人工智能等研究;电话:13973184545;E-mail: s_yushouyi@sina.com

