多关节凿岩机械手快速定位方法
来源期刊:中南大学学报(自然科学版)2001年第6期
论文作者:周友行 何清华 徐海良 邹湘伏
文章页码:622 - 625
关键词:机械手;凿岩机器人;钻臂;运动学方程
Key words:manipulator; the tunnel-drilling robot; boom; kinematics equations
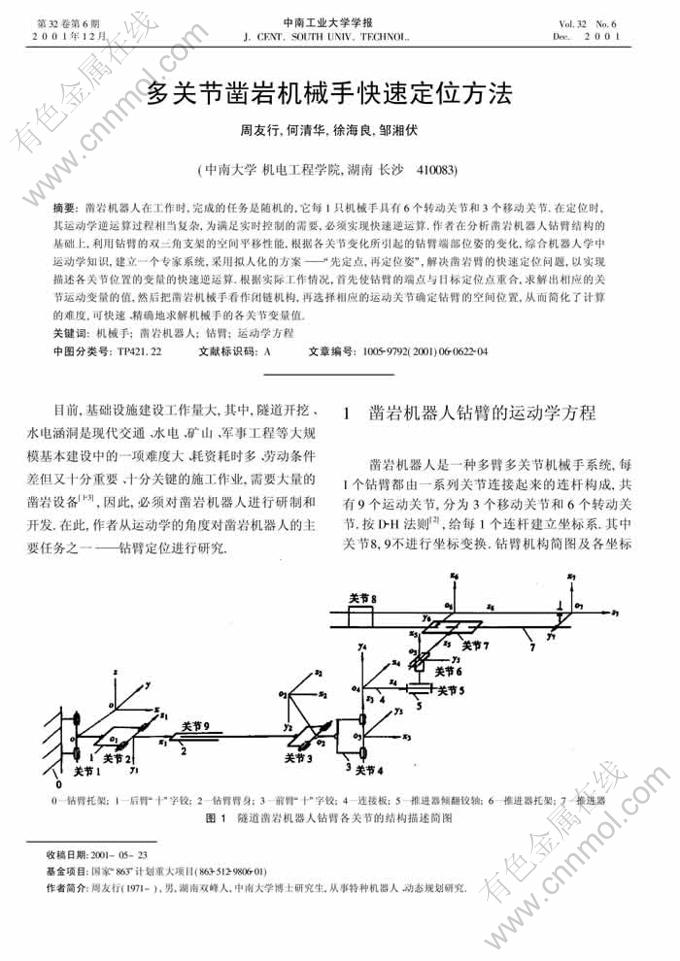
摘 要:凿岩机器人在工作时,完成的任务是随机的,它每1只机械手具有6个转动关节和3个移动关节.在定位时,其运动学逆运算过程相当复杂,为满足实时控制的需要,必须实现快速逆运算.作者在分析凿岩机器人钻臂结构的基础上,利用钻臂的双三角支架的空间平移性能,根据各关节变化所引起的钻臂端部位姿的变化,综合机器人学中运动学知识,建立一个专家系统,采用拟人化的方案―――“先定点,再定位姿”,解决凿岩臂的快速定位问题,以实现描述各关节位置的变量的快速逆运算.根据实际工作情况,首先使钻臂的端点与目标定位点重合,求解出相应的关节运动变量的值,然后把凿岩机械手看作闭链机构,再选择相应的运动关节确定钻臂的空间位置,从而简化了计算的难度,可快速、精确地求解机械手的各关节变量值.
Abstract: The bore assignment of the multi-joint tunnel-drilling robot is stochastic sequent. Each manipulator has six turn joints and three moving joints, the kinematics contradictory operation of orientation is very complex, and the speediness contradictory operation must be realized to satisfy real time control. Based on the foundation of anatomizing the structure of robot, taking full advantage of parallel move performance of the double triangle boom of the rock-drilling robot ac- cording to the condition of the diversification of the boomend location brought by the change of each joint, integrating the knowledge of robot kinematics, an expert system is established to adopt the personate means, that is“ the first toorientate the end, then to orientate the location ”to realize the speediness orientation. At first, the value of each joint movement variable must be solved to locate the end of the boom, then some relevant joints are chosen to fix on the space position.This method can solve the value of each joint variable quickly and exactly.