DOI: 10.11817/j.issn.1672-7207.2019.01.007
����λ��������ȫ��������̨��ǥ�˶�λ�㷨
������1, 2��������1, 2������3������Ӣ1, 2�������1, 2
(1. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083��
2. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
3. �й������ع���������˾������ ��ɳ��410100)
ժҪ�����ȫ��������̨�����ڿ�ʱǥ�˵Ķ�λ����Ҫ��ǥ��ĩ��λ�������Ƕȳ�������DH�˶�ѧģ��Ϊ����������ۼܵĶ�̬���;�̬������ǥ�˶�λ�����˶�ѧģ�ͣ����ö���Ⱥ�Ŵ��㷨(MPGA)����������������˶�ѧ������ùؽڱ���(�ǶȺ;���)�Ż����ؽ�ֵ��������Χ������������Ӻ��˹�ѡ�����ӽ��в��м��㣬��������ǥ���˶�ѧ����ģ�ͺ�MPGA�����ȷ���ؽڱ�����ǥ�˶�λ�㷨���о������������������ģ�ͽ���ǥ�˶�λʱ��ʵ��ǥ�˶�λ���С��0.1 m�����㹤��ʵ�ʶ�λҪ��
�ؼ��ʣ�ȫ��������̨����ǥ�˶�λ��DH�˶�ѧģ�ͣ�λ������������Ⱥ�Ŵ��㷨
��ͼ����ţ�TP241.2 ���ױ�־�룺A ���±�ţ�1672-7207(2019)01-0044-08
Positioning algorithm of drill rod for full computer-controlled rock-drilling jumbo based on pose error compensation
XIA Yimin1, 2, LI Zhengguang1, 2, LUO Jianli3, ZENG Guiying1, 2, MA Jiesong1, 2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China;
3. China Railway Construction Heavy Industry, Changsha 410100, China)
Abstract: With consideration of the drill rod accuracy requirement of full computer-controlled rock-drilling jumbo, and the pose error compensation of the drill rod, an error compensation kinematics model of the drill rod was proposed based on the DH kinematic model and the dynamic and static error of the arm. A positioning algorithm of drill rod based on kinematic error compensation model of drill rod was established by using multiple population genetic algorithm(MPGA) which optimized search range of each joint according to the analytic solutions of the forward kinematics without error compensation and combined migration operator and artificial selection operator. The results show that when the drill rod is positioned based on the error compensation model, the positioning error of the drill rod is less than 0.1 m, which meets the requirement of the actual positioning of the project.
Key words: full computer-controlled rock-drilling jumbo; drill rod positioning; DH kinematics model; pose error compensation; multiple population genetic algorithm
ȫ��������̨����һ�ּ���е�����ӡ�Һѹ�ȶ�ѧ�Ƽ�����һ�������ʩ���豸���봫ͳ�����豸��ȣ�ȫ��������̨������Ч���Ƴ�����[1]�����������ԭ�������ʩ���¹ʣ����Ϲ�����Ա��ʩ����ȫ����ʩ�������У��ؼ�����֮һ��ǥ�˵Ŀ���ȷ��λ��ǥ�˵��Զ���λ���ȺͶ�λ�ٶȾ������ֲ����㹤��ʵ����������������Ӱ��������ʩ��Ч�ʺ�ʩ��������Ŀǰ������̨���ڽ���ǥ�˶�λʱ���о���Ҫ�����˶�ѧ�������������˶�ѧ�����2���֡���������������ѧ�߶�����̨�����˶�ѧ�о��϶࣬�磺JIANG��[2-3]�����6r-2p����̨�������ʱ��Ϊ������������ϵͳ���ı�ؽ�����������������̲��漰��ֵ�����Ͳ��ݾ���WANG��[4]���ö�ż��Ԫ�������DH�����н�ģ���������ɶ�����̨���������˶�ѧ��⣻���廪��[5]�����˶�ؽ���۵��˶�ѧ���̣�������۵�ʵ�ʹ����ص������Χ�����һ�������ķ����������е�[6]�����һ�ֻ����˶��켣������ؽ�����������˶�ѧ��ⷽ���������о���δ��ֿ�������̨���ۼ��˶�ѧ����Ӱ�죬����δ�����������ʱ�������㷽����Ϊ�ˣ��������߽����ҵ�������˶�ѧ�����о�[7-10]���Ŵ��㷨�ڹ����е�Ӧ��[11-14]����DH�������ۼ������˶�ѧģ�ͣ�ͨ������ۼܶ�̬���;�̬�������˶�ѧ����ģ�ͣ��ڽ���ǥ�˶�λʱ�����ö���Ⱥ�Ŵ��㷨������������˶�ѧ��������������Ӻ��˹�ѡ�����ӣ���������ģ����⣬��֤����̨��ǥ�˵Ķ�λ���Ⱥ��ٶȡ�
1 ǥ�˶�λ����
1.1 �ۼܽṹ
ȫ��������̨���ۼܰ���6����ת�ؽں�2���ƶ��ؽڣ�ǥ�˰�װ���ƽ����ϣ�����Ҫ�ṹ��ͼ1��ʾ��
1.2 ǥ�˶�λ����
Ӱ������̨��ǥ��λ��������Ҫ���ط�Ϊ��̬���;�̬�����У���̬�������������������ȵ��µĵ��Ա��κ�������̬�������ṹ��������������(�¶ȡ�ĥ��)���µijߴ����ʹ��������ȡ�
�ڸ���ǥ��ĩ��λ������£����Ը�������������˶�ѧģ�������õ���Ӧ�Ĺؽڱ���(�ǶȺ;���)����������Ϊ����ۼܶ�̬����̬��������ֵ��ǥ������ģ�������ij�ʼ����ֵ��ͬʱ��Ϊ��֤�����ٶȺͼ��㾫�ȣ�Ԥ���趨����������ͨ��MPGA�㷨�Ը��ؽ�ֵ�����������������õ��ۼ��Ż��ؽ�ֵ��ʹǥ�˴ﵽ����λ�ˡ�����������о�˼·����ǥ�˶�λ��������о��������о�·����ͼ2��ʾ��

ͼ1 ����̨���ۼܽṹͼ
Fig. 1 Boom structure of rock-drilling jumbo
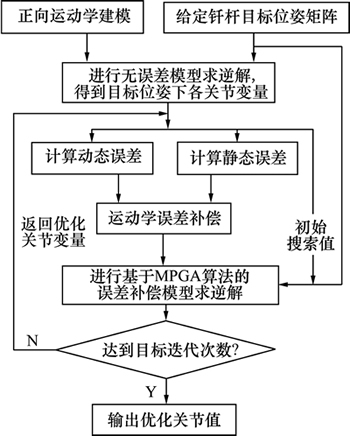
ͼ2 ����̨��ǥ�˶�λ�о�
Fig. 2 Positioning research on drill rod for rock-drilling jumbo
2 ǥ���˶�ѧ����ģ��
2.1 ǥ��������˶�ѧ���
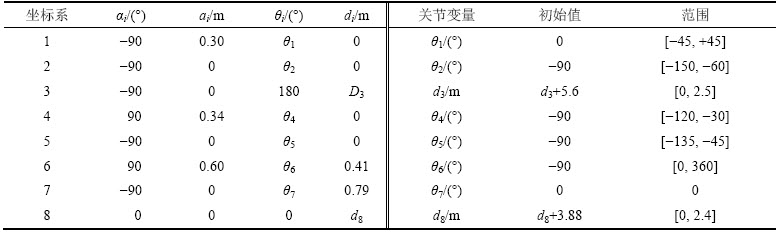
����ֻ��ê���̶���һ�㹤���������ۣ���ê�˹ؽ�Ϊ���ɹؽڣ��ؽڽǺ�Ϊ0�㡣����DH�����ڲ�����ģ����������ϵ��Ҫ�����ڹؽ�����ӳ����ϣ���ˣ����ڲ��ı��˶�ѧ�����ǰ���¶Բ�������ϵ����λ�˱任����������̨���ṹ�������������ؽ�����ϵ�����ƽ�����ת����ϵԭ��o6�عؽ���z6�ƶ�����d6��x7o7z7ƽ�棬��ê������ϵo7�عؽ���x7�ƶ�����a6��y8o8z8ƽ�档�ۼ�D-H�������1��ʾ���ۼ��˶�ѧģ����ͼ3��ʾ��
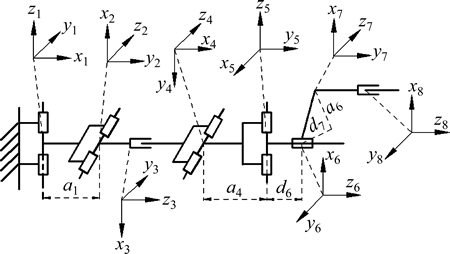
ͼ3 ǥ�������˶�ѧģ��
Fig. 3 Forward kinematics model of drill rod
����������ؽ�����任����
 (1)
(1)
���ñۼ������˶�ѧģ��Ϊ

 (2)
(2)
ʽ�У�i��ʾ��i���ؽڣ� ��
�� ��
�� ��Ϊǥ��λ�þ���
��Ϊǥ��λ�þ��� ��Ϊǥ�˵���̬����
��Ϊǥ�˵���̬����
















ʽ�У� ��
�� ��
��
 ��
�� ����ʵ��ʩ�������У�Ϊ����ʱ�۲����һ��Ĺ����������Ҫ�ڱۼܿ���滮����ȷ���ƽ�����ת�ؽڦ�6����0�㣬90�㣬180���270����4�ֹ�����
����ʵ��ʩ�������У�Ϊ����ʱ�۲����һ��Ĺ����������Ҫ�ڱۼܿ���滮����ȷ���ƽ�����ת�ؽڦ�6����0�㣬90�㣬180���270����4�ֹ�����
���ݱۼ������˶�ѧģ�ͽ����Ƶ�����
 (3)
(3)
��1 �ۼ�DH����
Table 1 DH parameters of boom
Ϊ��ֹ���ַ�ĸΪ0���¼�����������˶�ѧ������Ϊ ��һ�㹤����
��һ�㹤���� ���������
���������
2.1.1 һ�㹤�����
��ʱ��
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)

 (8)
(8)

 (9)
(9)

 (10)
(10)
 (11)
(11)

 (12)
(12)
��һ�㹤���£��˶�ѧ�������˳��Ϊ ��
��
2.1.2 ��������
��ʱ�� ��������ֵ�ⲻ��գ��ж���⣬���ȸ�����������ؽ�d3��
��������ֵ�ⲻ��գ��ж���⣬���ȸ�����������ؽ�d3��

 (13)
(13)
 (14)
(14)
 (15)
(15)

 (16)
(16)
 (17)
(17)
��������£��˶�ѧ�������˳��Ϊ ��
��
2.2 �ۼܶ�̬����
2.2.1 ��ۼ��ƽ�����̬������
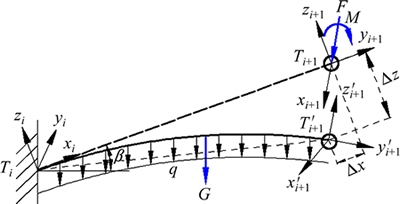
����ۺ��ƽ����ֱ��Ϊһ�˹̶���Bernoulli-Euler�����ۼܵ�Чģ����ͼ4��ʾ�����ڴ��ĩ�˵��ƽ����IJ�������������2 t�����ĩ�������δﵽ0.1 m���ϣ����ڴ��Ӷȱ��Σ������Ӷȹ�ʽ�������ã������¶��Ӷȹ�ʽ���иĽ���
ͼ4 �ۼܵ�Чģ��
Fig. 4 Equivalent model of boom
1) ���ۼ�ĩ���ܼ����غ�ʱ���ۼ�����һ���Ť��Ϊ
 (18)
(18)
ʽ�У�MeΪ�ۼ�ĩ�����ܼ���Ť�أ�FΪĩ�����ܼ�������xA��zA�ֱ�Ϊĩ��λ��x�����z�����λ�ƣ���AΪת�DZ��Σ�Me��F���ƽ�������λ��Ӱ�죬��Ӱ�����Ϊ��۸���ֵ��2���ƽ�������ֵ��4���ƽ�������ֵd8��
�ۼ�������λ�õı���Ϊ
 (19)
(19)
ʽ�У�zΪ�Ӷȱ��Σ���Ϊ�˽���ת�DZ��Σ�xΪ������Σ�EΪ�ۼܵ���ģ����IΪ��Чת��������
�����㣬�õ��ۼ�ĩ�˽Ƕȱ���Ϊ
 (20)
(20)
ʽ�У�LΪ�ۼܵ�ȫ�����ۺ�ʽ(18)~(20)��
 (21)
(21)
2) �ۼ��ܾ����غ�ʱ������ʽ(19)����
 (22)
(22)
����߽����� ��
�� (����
(���У� Ϊĩ�˽Ƕȱ���)��
Ϊĩ�˽Ƕȱ���)�� ����ֵ
����ֵ ��
�� ����
����
 (23)
(23)
ʽ�У� ��qΪ�����غɣ���Ϊ�ۼܸ���
��qΪ�����غɣ���Ϊ�ۼܸ���
�Ƕȣ����ۼܶ�ӦΪ���ʱ�� �����ۼܶ�ӦΪ�ƽ���ʱ��
�����ۼܶ�ӦΪ�ƽ���ʱ�� ��
��
��ʽ(19)��
 (24)
(24)
ʽ�У�
 (25)
(25)
Ӱ��ۼ��ӶȺͶ˽���ת�ǵIJ���Ϊ�������ֵd3����۸���ֵ��2���ƽ�������ֵd8���ƽ�������ֵ��4�����У���ҪӰ�����Ϊ��۸���ֵ��2�ʹ������ֵd3������ת�ؽڦ�2���ƶ��ؽ�d3�Ŀɱ䷶Χ�ڶԴ�۱�����⣬�趨��4��d8������λ����2���غ�ʩ�ӷ�ʽ�������Ե��ӣ��Ӷȱ��Φ�z�Ͷ˽���ת�Ǧ��ȱ��ν���ֱ���ͼ5��ͼ6��ʾ���Ӷȱ��Φ�z�ֲ���0.02~0.12 m֮�䣬�˽���ת�Ǧ��ȷֲ���0.46��~1.86��֮�䣬�������۳��ȳ�����ء����������Φ�x��С��������Ϊ ����ʵ�������п��Ժ��ԡ��ƽ�����̬���������۵Ķ�̬��������ͬ��������������С���ڶ�̬���������пɺ��ԡ�
����ʵ�������п��Ժ��ԡ��ƽ�����̬���������۵Ķ�̬��������ͬ��������������С���ڶ�̬���������пɺ��ԡ�
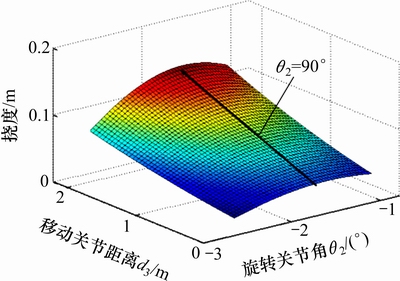
ͼ5 ����Ӷȱ���
Fig. 5 Deflection of large arm
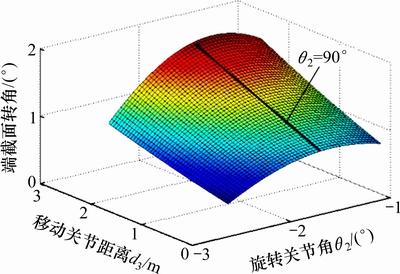
ͼ6 ��۶˽���ת��
Fig. 6 Cross rotation angle of large arm
2.2.2 �ۼܶ�̬����
�Դ���ƶ��ؽ�d3���ж�̬�������ڽ��бۼܶ�λʱ������������ģ����������ø��ؽ�ֵ�������õ��Ӷȱ��Φ�z�Ͷ˽���ת�Ǧ��ȣ�������ֵ���봫�ݾ��� ���任��ʽ��ͼ7��ʾ��
���任��ʽ��ͼ7��ʾ��
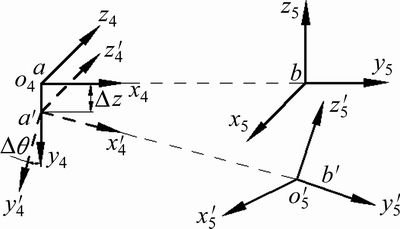
ͼ7 ��̬��������任
Fig. 7 Coordinate transformation of dynamic error compensation
ͼ7�У�����ϵo3����x���ƶ��Ӷ�ֵ��z������ ����ת�˽���ת�Ǧ��ȣ��任������ϵ
����ת�˽���ת�Ǧ��ȣ��任������ϵ ����������ϵ���ݱ任��
����������ϵ���ݱ任�� ���任��ϵΪ
���任��ϵΪ


 (26)
(26)
ʽ�У�T��Ϊ��̬��������
2.3 �ۼܾ�̬����
���ڹ�ҵ���������߱궨����������ȫվ�ǺͽǶ��Ƕ����ڹؽ�����о���궨��ƫת�Ƕȱ궨���������ؽڽṹ����(����a���ȣ�d)�������㶯�����ۣ���ʽ(1)���ݾ�����ƫ������

 (27)
(27)
ʽ�У�Ϊ��i�ؽڵĴ��ݾ���
2.4 ǥ�������˶�ѧģ�ͽ���
��ϱۼܶ�̬���;�̬�������õ�ǥ���˶�ѧ����ģ�ͣ�

 (28)
(28)
ʽ�У� ��
��
3 ǥ������ģ������㷨
����ǥ�˵�����λ�˺ͽ���������̨��ǥ���˶�ѧ����ģ�ͣ����ö���Ⱥ�Ŵ��㷨(MPGA)������ģ������⣬�Ը��ؽڱ�������������������������ؽ��Ż�ֵ��ʹǥ�˴ﵽ����λ�ˡ�
3.1 ǥ���˶�ѧMPGAģ��
3.1.1 �����ʼ��Ⱥ
��ʼ��ȺΪMPGA�㷨�����������㡣���Ĺ���ij�ʼ��Ⱥ��Ϊ10����ÿ����Ⱥ������Ϊ100�����趨ÿ���ؽ�ֵ�ڸ����Ⱦɫ����ռ��20������λ�ã���֤�㷨����⾫�ȡ�
3.1.2 ����Ŀ�꺯��
��֪ǥ������λ��Ϊ
 (29)
(29)
ʽ�У�RgΪǥ��������̬����PgΪ����λ�þ���
����Ⱥ�и�������Ĺؽ�ֵ����ۼ��˶�ѧ����ģ�ͣ��õ�����ĵ�ǰǥ��λ�˾���
 (30)
(30)
ʽ�У�RcΪǥ�˵�ǰ��̬����PcΪ��ǰλ�þ���
����Ŀ�꺯����
 (31)
(31)
ʽ�У� ��Ϊ����Ⱥ�и����ǥ�˼�����̬��������̬����̬��
��Ϊ����Ⱥ�и����ǥ�˼�����̬��������̬����̬�� ��Ϊǥ�˼���λ�ú�����λ�õ�λ����
��Ϊǥ�˼���λ�ú�����λ�õ�λ����
3.1.3 ���Լ������
���������˶�ѧ��������������ת�ؽڽǷ�Χ����Ϊ �������ƶ��ؽھ��뷶Χ����Ϊ
�������ƶ��ؽھ��뷶Χ����Ϊ ���Ż��˸��ؽڱ�����������Χ��������㷨������ٶȡ�
���Ż��˸��ؽڱ�����������Χ��������㷨������ٶȡ�
������Pc�������Ŵ��㷨��ȫ��������������ͳ������Pcȡֵ��ΧΪ0.7~0.9��MPGA���ö�㽻�淽ʽ����ǿ���㷨������������������������
������Pm�����˾ֲ�������������ͳPmȡֵ��ΧΪ0.001~0.050������������Χ�Ѿ���Լ�С����Ҫ��ǿ�ֲ�������������ˣ�������Pm�������ȡPmΪ0.05��
3.1.4 ������Ӧ�Ⱥ���
�������̶ķ�ѡ����Ӧ�ȸߵĸ��������һ����������Ӧ�Ⱥ���FΪ
 (32)
(32)
ʽ�У�a��b�ֱ�Ϊ��̬����λ������Ȩ��ϵ������̬������λΪrad��λ�ò�����λΪm��������������ͬ��������������ȷ��Ȩ��ϵ��Ϊa=1��b=1.5~2.5��
3.1.5 �Ż�����
�����������ӣ����Ƹ���Ⱥ�Ķ����ԣ�������Ⱥ�����Ÿ�������������Ⱥ�����������Ⱥ�е����Ӹ��壬ʵ�ָ���ȺЭͬ������
�����˹�ѡ�����ӣ���ÿ�������Ÿ�����뾫����Ⱥ��������Ⱥ������ѡ����ͱ���Ȳ�����ֻ��¼����ÿһ��������Ⱥ��
3.2 ��⾫�ȷ���
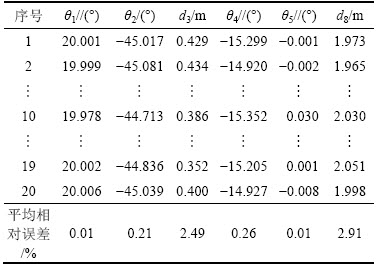
����һ��ؽ�ֵ(��1=20�㣬��2=-45�㣬d3=0.4 m����4=-15�㣬��5=0�㣬d8=2.0 m)���ƽ�����ת�ؽڽǦ�6��ê�˹ؽڽǦ�7Ϊ0�㣬����MATLAB�����㷨��̣������˶�ѧ����ģ�����õ���ǥ��λ�˼���20����⡣�Աȼ���ؽ�ֵ�����ؽ�ֵ������ƽ��ֵ��������2��ʾ����ת�ؽڵ�������ԶС���ƶ��ؽڵ�������������1����������������Ϊ����̨���ṹ�ߴ�ϴ���ת�ؽڶ�λ������Ӱ��ҪԶ�����ƶ��ؽڵ�Ӱ�졣��������ؽ�d3���ƽ��������ؽ�d8�������Ի�����ϵ�������ʵ������Ӧ�Ⱥ�����λ������Ȩ��ϵ��b�������ƶ��ؽڶ�ĩ��λ�˵�Ӱ�졣
��2 ������ؽ�ֵ��������ƽ��ֵ
Table 2 Inverse calculation of joint value and average relative error value
�ֱ�ѡȡ�㷨������������Ⱥ�Ľ������̽��жԱȣ������ͼ8��ʾ��MPGA�㷨��400����ʹ��Ӧ�ȴﵽ0.99���ϣ��������ǿ�������ٶȿ죬�������ȶ��ɿ������ᷢ����������������ˣ����㷨������������Ϊ���㵽��400����Ⱥ��
4 ������֤
��������̨��ʩ��ʱ��ʵ��ͣ��λ�ú�������ƣ�����18������̨��ǥ������λ��ֵ������λ����ͼ9��ʾ�����У�Բ��λ�ô���ǥ�˶�λλ�ã������������߶�Ϊǥ����Ҫ�ﵽ����̬���������ϵ�ͶӰ���趨ֱ��Ϊ11 m�������������������̨����ۺ�����ľ���Ϊ12 m��ͼʾ����ϵˮƽ����Ϊy�ᣬ��ֱ����Ϊz�ᣬ��ֱ����������Ϊx�ᡣ���л�������ģ�͵����˶�ѧ��⣬�õ����ؽڶ�Ӧ��ֵ���ڳ���ʹ��ȫվ���ڴ�ۺ��������վ�������ۼܸ��ؽ�������ؽڱ���������ȫվ�Dz���ǥ��λ�ã�����������3��ʾ(���У�[x, y, z]Ϊ�������꣬ Ϊ�ۼ��ƶ����ǥ��ʵ������)��
Ϊ�ۼ��ƶ����ǥ��ʵ������)��
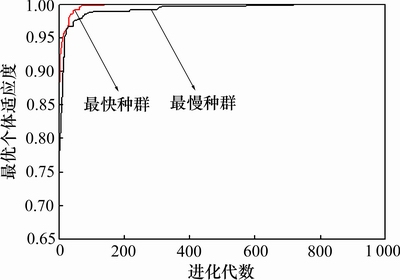
ͼ8 MPGA�Ŵ��㷨��������
Fig. 8 Evolution curves of MPGA genetic algorithm
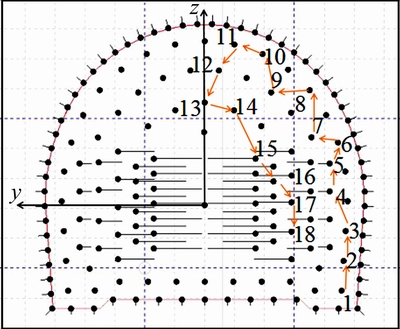
ͼ9 ��������ͼ
Fig. 9 Borehole of tunnel
��3 ǥ�˲������
Table 3 Measuring results of drill rod
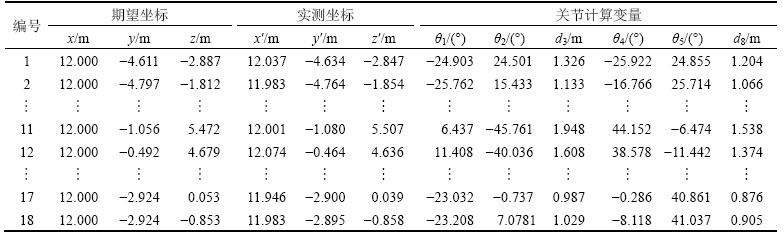
�ԱȲ���λ��������λ�õ�λ���������ͼ10��ʾ����ͼ10�ɼ���x����ƽ�����Ϊ0.031 m��y����ƽ�����Ϊ0.028 m��z����ƽ�����Ϊ0.029 m���ܾ���ƽ�����Ϊ0.056 m�������ܾ�������С��0.100 m�����㹤��ʵ�ʶ�λҪ��
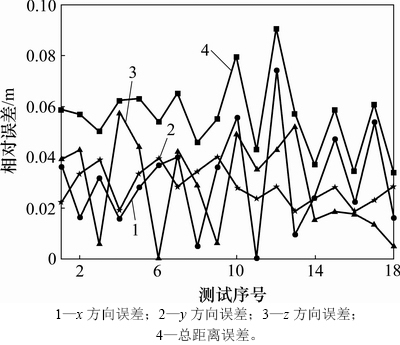
ͼ10 ǥ��ĩ��λ�����
Fig. 10 End position errors of drill rod
5 ����
1) �ۼܸ��غ����ز����Ķ�̬���ݺ��ԣ�����Ӷȱ��η�ΧΪ0.04~0.12 m���˽���ת�Ƿ�ΧΪ0.46��~1.86�㣻�������������Ϊ10-5~10-4�����ν�С���ƽ����Ķ�̬���������۵Ķ�̬��������ͬ��
2) ��Թ�����ȫ��������̨��ǥ�˿��ٶ�λ���⣬�����һ�ֻ����˶�ѧ����ģ�ͺ�MPGA�㷨������ǥ�˶�λ��������������������˶�ѧ������Ż����ؽڱ�����������Χ������������Ӻ��˹�ѡ�����ӣ�����㷨������ٶȺ��������ȣ��õ�����λ���µ��Ż��ؽڱ�����
3) �ڳ����ȫ��������̨������ǥ�˶�λ���飬����ǥ������λ�˾��������õ��Ż��ؽڱ����������ۼܸ��ؽ�����Ӧ�ؽڱ�����ʵ��ǥ��λ��������λ��ֵ���С��0.100 m�����㹤��ʵ�ʶ�λҪ��
�ο����ף�
[1] KIM Y K, MOON H K. Application of the guideline for overbreak control in granitic rock masses in Korean tunnels[J]. Tunnelling & Underground Space Technology, 2013, 35(3): 67-77.
[2] JIANG Qimi, AHMED S N. The kinematics of 6R-2P mining drill jumbo[J]. Journal of Mechanisms and Robotics, 2014, 6(3): 034501.
[3] WANG Yujun, FANG Can, JIANG Qimi, et al. The automatic drilling system of 6R-2P mining drill jumbos[J]. Advances in Mechanical Engineering, 2015, 7(2): 504861.
[4] WANG Hengsheng, ZHAN Deyou, HUANG Pinglun, et al. Inverse kinematics of a heavy duty manipulator with 6-DOF based on dual quaternion[J]. Journal of Central South University, 2015, 22(7): 2568-2577.
[5] ���廪, �ܺ��. ���һ�������۵��˶�ѧ�о�[J]. ���Ϲ�ҵ��ѧѧ��(��Ȼ��ѧ��), 1998, 29(5): 483-486.
HE Qinghua, ZHOU Hongbing. Kinematic study of rock drilling robot arm[J]. Journal of Central South University of Technology(Natural Science Edition), 1998, 29(5): 483-486.
[6] ������, ����ׯ, �Ž�ѫ. �����˶��켣�Ļ������˶�ѧ����о�[J]. ��е��ѧ�뼼��, 2009, 28(7): 862-866.
ZHOU Youhang, TANG Wenzhuang, ZHANG Jianxun. A study of the inverse kinematics of a multi-joint redundant robot based on its moving path[J]. Mechanical Science and Technology for Aerospace Engineering, 2009, 28(7): 862-866.
[7] WANG Wei, WANG Gang, YUN Chao. A calibration method of kinematic parameters for serial industrial robots[J]. Industrial Robot, 2014, 41(2): 157-165.
[8] WANG Wei, WANG Lei, YUN Chao. Design of a two-step calibration method of kinematic parameters for serial robots[J]. Chinese Journal of Mechanical Engineering, 2017, 30(2): 438-448.
[9] ZENG Yuanfan, TIAN Wei, LIAO Wenhe. Positional error similarity analysis for error compensation of industrial robots[J]. Robotics and Computer-Integrated Manufacturing, 2016, 42: 113-120.
[10] LI Qinchuan, HERVE J, HUANG Pengcheng. Type synthesis of a special family of remote center-of-motion parallel manipulators with fixed linear actuators for minimally invasive surgery[J]. Journal of Mechanisms and Robotics, 2017, 9(3): 031012.
[11] AYYILDIZ M, MUSTAFA Z, ETINKAYA K. Comparison of four different heuristic optimization algorithms for the inverse kinematics solution of a real 4-DOF serial robot manipulator[J]. Neural Computing and Applications, 2016, 27(4): 825-836.
[12] �ս�, ������, �����, ��. �����Ŵ��㷨��Լ������ɡϵͳ�麽�켣���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(2): 404-410.
TAO Jin, SUN Qinglin, ZHU Erlin, et al. Genetic algorithm based homing trajectory planning of parafoil system with constraints[J]. Journal of Central South University(Science and Technology), 2017, 48(2): 404-410.
[13] ZHENG J N, CHEN C F, GEN M. Multi-objective multi- population biased random-key genetic algorithm for the 3-D container loading problem[J]. Computers and Industrial Engineering, 2015, 89: 80-87.
[14] ���, �˵Ϸ�, �����. ����������ϵ�����غɷ����Ż��ĸĽ��Ŵ��㷨[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(7): 2521-2527.
HAN Kun, PAN Difu, HAN Hongfei. An improved genetic algorithm for secondary spring load equalization of railway vehicles[J]. Journal of Central South University(Science and Technology), 2016, 47(7): 2521-2527.
(�༭ �²ӻ�)
�ո����ڣ�2018-02-12�������ڣ�2018-04-16
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2012AA041803)�����ϴ�ѧ�����У��������ҵ���ר���ʽ�������Ŀ(2017zzts400) (Project(2012AA041803) supported by the National High Technology Research and Development Program(863 Program) of China; Project(2017zzts400) supported by the Fundamental Research Funds for the Central Universities of Central South University)
ͨ�����ߣ�����������ʿ�����ڣ����´��;��װ���о���E-mail: xiaymj@ csu.edu.cn

