�����з�����������ȶ��Է���
����Ȩ1��������1������2������ΰ1��������1
(1. ���������̴�ѧ ���繤��ѧԺ�������� ��������150001��
2. ���������̴�ѧ �Զ���ѧԺ�������� ��������150001)
ժҪ��Ϊȷ��������Բ������˽ṹ�İ�������������ȶ��Լ��ȶ�ԣ�������1�������ڰ�������������ȶ����ж��������������������ṹ���г����ʹ�ñջ�ʸ��������������������֮������λ�ù�ϵ��Ӧ�ù淶�������ȶ�ԣ��(SNESM)������������˾�̬�ȶ��Խ����������������ӻ����»����˾�̬�ȶ�ԣ�ȵ���ѧģ�͡�ͨ����ֵ�������˻������ȶ�ԣ����������ĸ߶ȼ��������֮��Ĺ�ϵ���ȶ���ʵ�����������÷����ܹ�ȷ�ж���������˵������ȶ��ԡ�
�ؼ��ʣ���������ˣ��淶�������ȶ�ԣ��(NESM)���ȶ�ԣ��
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2014)10-3416-07
Walking stability analysis of an octopod crab-like robot
WANG Liquan1, WANG Hailong1, CHEN Xi2, XU Junwei1, REN Mengxuan1
(1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China;
2. College of Automation, Harbin Engineering University, Harbin 150001, China)
Abstract: A stability judging method for octopod robot was proposed, in order to exactly evaluate the walking stability and stability margin of a new octopod robot with circular-arc knuckle structure. The structure of the octopod robot was simplified. The relative position between the centroid and touchdown point was calculated by closed-loop vector method. According to the static stability of the octopod robot which was demonstrated by the method of normalized energy stability margin (NESM), a static stability margin mathematical model of a robot in complex conditions was given. According to the results of numerical simulation, the relationship between stability margin and the center of mass height, ground angle was proposed. Experiment based on the proposed method is carried out and the results verify that the proposed method can accurately judge the octopod robot walking stability.
Key words: octopod; normalized energy stability margin (NESM); stability margin
��ʽ�������������ʽ���Ĵ�ʽ�����˵���Ҫ���ƾ��������ƽ��·����ʵ���ȶ����� [1-3]����ʽ�������˶�������Ҫ���������ȶ���Ҫ�����ܷ����㷭�����˶������У��������㷭������ܵ��»����˽ṹ����ϵͳʧ�ء���ҵʧ����������ϵͳ���ϵ�һϵ������[4]����ˣ��㷭�ȶ����о�������ʽ�����˶�����������Ҫ�ġ����е������У�����˼��ֹ��ڶ���������ȶ��Ե��ж�����������McGhee��Frank��20����60������������ͶӰ��(CG projection method)������ľ�̬�ȶ����б����䶨��Ϊ�����������������֧����Ĵ�ֱͶӰ�㵽֧�Ŷ���ε���̾��롣�÷����IJ���֮����ֻ�ܴ���ƽ̹������ȶ��ԣ�����������ƽ̹·��[5]��Ϊ�˸��õ������ȶ��ԣ�Messuri��1985������������ȶ�ԣ��(energy stability margin, ESM)�ķ��������������˵�ǰ�������㵹�������������ܲ���Ϊ�ȶ�ԣ�������÷������۶���ƽ̹·�滹�Ƿ�ƽ̹��·�涼�����ʺϵ�[6]������ESM�����ۣ������˵��ȶ����������������ȣ�����ʵ������ˣ����Ż��������������ӣ����ĸ�������Ҳ��֮�������˵��ȶ��Բ�����ɱ������������ڴˣ�Messuri��Klein�������ȶ�ԣ�����иĽ������ǵ��������ȶ��Ե�Ӱ�죬����淶�������ȶ�ԣ��[1] (normalized energy stability margin, NESM)��2005��Garcia��[7]�Թ淶�������ȶ�ԣ���������ģ���������Ӱ�쿼�ǵ��Ƶ������У�����˹淶����̬�����ȶ�ԣ��(normalized dynamic energy stability margin, NDESM)��ʹ�������Ϊ��̬�ȶ����ж����ǣ��÷���û�п������ĸ�������������ɵ�[8]����˲���֧����ѹ������������������γɵ�֧������θ��ߵ���̾��������������������ȶ��ԡ�����[4]������ȶ�(stability pyramid technique, SPT)���������㷭�ȶ���ָ���Կ��ع������˵��ȶ��Խ����ۺ��ж����ﺣ����[9]�������ʽ���λ����ˣ������㷭�ȶ���ָ���������ȶ������Ի����˵��˶��ȶ��Խ����ۺ����ۣ�����˶�̬�����ȶ��ķ���(dynamic energy stability pyramid method, DESPM)����û�жԸ�֪ϵͳ���á������ٶȵȽ��п��ǣ���ˣ����������ڽ��ʵ�����⡣����˵�������еļ����ȶ������۷����������ƣ����д���һ���о���Ϊȷ���۾���Բ����ָ�ڽṹ��������˵��˶��ȶ��ԣ����Ľ������ȶ����ж������IJ���֮������ȫ�濼�ǣ���NESM���иĽ���������Ӧ���ڰ���������˶��ȶ����о��С�
1 ���������
�����з�����˵���άģ����ͼ1��ʾ������������ṹ�����˲����������2���֡����ε����ɵװ��ǻ����˸�ϵͳ�����壬�װ��벽����֮��ͨ�����������ӡ���з�������Ժ�������Ϊ��Ҫ�����߷�ʽ��Ϊ�ṹ���Ч�ʣ������������ڻ�����ƽ�жԳƲ��á�ÿ���������ɻ��ڡ��ɽڡ��ֽں�ָ��4������ɣ����ؽڲ��ô�����ʽ����ʽ���ӣ��ֽں�ָ��֮��������˶�����ָ�����������ؽڵ���Ʋ���ģ�黯���˼�룬���͵�ģ�黯�����ؽ�����ֱ���ŷ����ͨ�������ϸ˼��������Ť�أ������ϸ˼���������������ʹ�����˼�ʹ�ڵ�����������Ȼ�ܹ����ֵ���ǰ����̬����ģ�黯�ؽھ��д�����϶С�����Ť�ش����Ժá�����ά���ŵ�[10-12]��Բ����ָ�ڽṹʹ���������˶������ܹ�������������˶�Ч����ʹ�˶����ӵ�ƽ�ȡ����ͷ�з�����˵ļ����������1��ʾ�������˵�����䱸�������������ڼ�ⲽ���������ĽӴ������ڻ����˵Ļ����Ϸ������˵������̡�GPS�������ǵȴ��������ڻ����˵ĵ�����λ���ڲ�����״̬�ļ�⡣
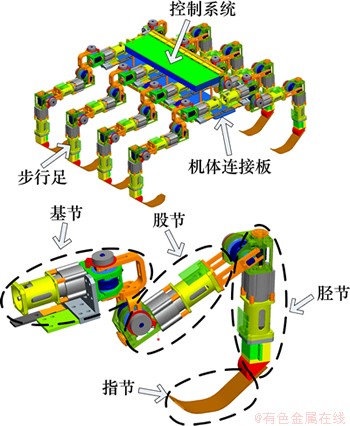
ͼ1 �����з������3άģ��
Fig.1 3D model of a octopod crab-like robot
��1 �����з�����˼�������
Table 1 Technical parameter of a octopod crab-like robot
2 ��ѧģ��
��������˻������ľ�վ����ĸ߶Ⱥ����������������λ�ù�ϵ�Ի����������ȶ�������������Ҫ��Ӱ�죬���ȶ����з�����˽ṹ�������г���ͼ�Ȼ��Լ�Ļ����˻��������˶�ѧ������������ĸ߶ȡ����������˸��ؽڽǶ�֮��Ĺ�ϵ���Ա�Ի����˰��������ȶ��Խ����о���
�������з�����˴���������վ��״̬�£����������塢�������֧�ŵ��湹��һ�����в�֧ͬ������������[13]�����ڰ�������˲��ֲ���ƽ�жԳƵķ�ʽ�������˺���ʱ�ɽ���ռ䲢��������Ϊƽ��5���˻�����������˻�����ͼ��ͼ2��ʾ�����Ц�1�ͦ�3Ϊ��������ɽ����������֮��ļнǣ���2�� ��4Ϊ�ֽ������ڹɽڵļнǣ������˹ɽڡ��ֽں�����ij��ȷֱ���L1��L2��L3��ʾ��Ϊ��ʹ���������ܹ��ɼ���ȷ�ĵش�ƫ�ǣ����ϻ����˶�λ����ϵͳ�����������������������ʵ�����߹����������Ӧʼ�մ���ˮƽ״̬�������������Բ����ָ�ڽṹ�����������߹�����û�л���ֻ�д������˶��������˻���߶�h��ǰ�������֮��Ŀ��sӦʼ�ձ��ֲ��䡣
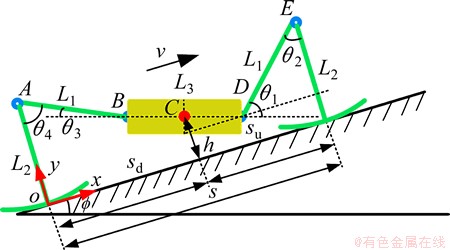
ͼ2 �����з��������������ͼ
Fig.2 Walking mechanism diagram of a octopod crab-like robot
�Լ�Ļ����˻���Ӧ�ñջ�ʸ����[14]�ã�
 (1)
(1)
ʽ�У�ri����������ϵԭ��ָ��i��ʸ����rijΪ��i��ָ��j��ʸ����i��j�ֱ�ָ��ͼ�е�A��B��C��D��E�㡣
��ʽ(1)�и�ʸ����ͼ������ϵ��x��y����ͶӰ���ɻ�û����˵����ľ�վ����ĸ߶�h����ؽڽǶ�֮��Ĺ�ϵ��
 (2)
(2)
ͬ���������˵�������վ�����ͶӰ���������������������������ľ���sd��su����ʽ(3)��ã�
 (3)
(3)
ͨ����ʽ(2)��ʽ(3)������֪����������б��������ʱ���������ľ�б��ĸ߶�h��ǰ��֧��������Ŀ��s��б�����б�Ƕ� ��������ɽڵļнǦ�1�ͦ�3��ͬ������
��������ɽڵļнǦ�1�ͦ�3��ͬ������
3 �ȶ��Է���
�������з�����˴�������״̬�£����˶��ٶȽϵͣ�ͨ�����Ժ������嶯�ܶ��ȶ��Ե�Ӱ�죬�ڷ��������������ȶ���ʱ���ɲ��ù淶���������ȶ�ԣ��(NESM)���ж����ȶ��ԡ����û������Ƹ���ת����ת���ٽ��ȶ�λ��ʱ���ĵ㴹ֱ�����ϵĸ߶ȱ仯�������������˵��ȶ�ԣ�ȣ���ͼ3��ʾ��
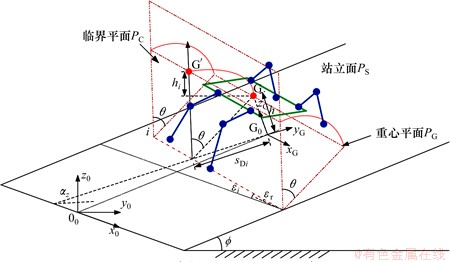
ͼ3 �����з�����˾�̬�ȶ�ԣ�ȼ����ͼ
Fig.3 Calculation diagrams of static stability margin for a octopod crab-like robot
Ϊ��ʹ���������ȷ�����ȸ���һЩ�����õ���һЩר�����ʵĶ���[15]��
֧����PSΪ����Ļ�����վ��ƽ�棻��ת����iΪ������2������������γɵĻ����˿����䷭����֧�űߣ�����ƽ��PGΪ�ɻ�����������֧�ű������γɵ�ƽ�棻�ٽ�ƽ��PCΪ���ȶ�ԣ��Ϊ0ʱ��������������ת��������γɵ�ƽ�棻б����� Ϊˮƽ��������˵�֧��ƽ��֮��нǣ����ĸ߶�hΪ���������ĵ�֧�������̾��룻��ת���ˮƽ��Ǧ�iΪ��ת�����ڻ�����֧�����ڵ�ͶӰ��֧������ˮƽ��֮��ļнǣ���ת��ߴ�ֱ��Ǧ�rΪˮƽ������ת����֮��ļнǣ�֧�ſ��sDiΪ������֧�����ڵ�ͶӰ�㵽֧�ű��ߵ���̾��룻�ȶ�ԣ��SNESMijΪ���������˵ֿ�����i��j������γɵ�֧�ű��߷������������ȶ�ԣ��SNESMiΪ���������˵ֿ���֧�Ŷ���ε�i��֧�ű߷�����������
Ϊˮƽ��������˵�֧��ƽ��֮��нǣ����ĸ߶�hΪ���������ĵ�֧�������̾��룻��ת���ˮƽ��Ǧ�iΪ��ת�����ڻ�����֧�����ڵ�ͶӰ��֧������ˮƽ��֮��ļнǣ���ת��ߴ�ֱ��Ǧ�rΪˮƽ������ת����֮��ļнǣ�֧�ſ��sDiΪ������֧�����ڵ�ͶӰ�㵽֧�ű��ߵ���̾��룻�ȶ�ԣ��SNESMijΪ���������˵ֿ�����i��j������γɵ�֧�ű��߷������������ȶ�ԣ��SNESMiΪ���������˵ֿ���֧�Ŷ���ε�i��֧�ű߷�����������
��������˴�������״̬��ռ���̬��ͼ3��ʾ������x0��y0��z0Ϊ�����ڴ���ϵ�ȫ������ϵ��xG��yG��zGΪ֧��������ϵ��������������֧�����ڵĴ�ֱͶӰ�� ��Ϊ������ϵ��ԭ�㣬 xG�����������᷽����ͬ��yG�ػ����ǰ�����������˶���3�㴦��֧��״̬ʱ�����˶�·�治������֧������ܲ�����ͬһƽ�棬��ʱ�����˵�֧����ѡ����ʹ���ĸ߶�h���������ͼ4�еļ��ι�ϵ������û��������������֧�ű�i��SNESMiΪ��
��Ϊ������ϵ��ԭ�㣬 xG�����������᷽����ͬ��yG�ػ����ǰ�����������˶���3�㴦��֧��״̬ʱ�����˶�·�治������֧������ܲ�����ͬһƽ�棬��ʱ�����˵�֧����ѡ����ʹ���ĸ߶�h���������ͼ4�еļ��ι�ϵ������û��������������֧�ű�i��SNESMiΪ��
 (4)
(4)
ʽ�У�i��ʾij��֧�űߣ�hiΪ������֧�ű�iת�����ٽ��ȶ�λ��ʱ���Ĵ�ֱ�߶ȵı仯��
������������˶������в�̬�ȶ�ԣ�ȿ�ͨ����ʽ���㣺
 i=1, 2, ��, n (5)
i=1, 2, ��, n (5)
���У�nΪ��������������γɵ�֧������εı�����
ͨ��ʽ(4)������ð�������˵ľ�̬�ȶ�ԣ�ȡ�����������£��� Ϊ����ʱ�������˴��ڲ��ȶ�״̬���������㷭��������0ʱ�������˴����ٽ��ȶ�״̬��������ʵ��Ӧ����һЩ��е����λ�ÿ������Ĵ��ڣ��������ڴ�״̬��Ҳ���п���ʧ�ȣ���ˣ�Ҳ������Ϊ���ȶ�״̬��������0ʱ�������˴����ȶ�״̬����ӱ����˻������ȶ��ij̶ȣ�����Ϊ�ȶ�ԣ�ȣ�Խ������Խ�ȶ����ֿ��Ŷ�������Ҳ��Խǿ��
Ϊ����ʱ�������˴��ڲ��ȶ�״̬���������㷭��������0ʱ�������˴����ٽ��ȶ�״̬��������ʵ��Ӧ����һЩ��е����λ�ÿ������Ĵ��ڣ��������ڴ�״̬��Ҳ���п���ʧ�ȣ���ˣ�Ҳ������Ϊ���ȶ�״̬��������0ʱ�������˴����ȶ�״̬����ӱ����˻������ȶ��ij̶ȣ�����Ϊ�ȶ�ԣ�ȣ�Խ������Խ�ȶ����ֿ��Ŷ�������Ҳ��Խǿ��
3.1 ��������������ȶ��Է���
��ǰ������۷�����֪��ֻҪ���ֻ����˵��ȶ�ԣ������0�������˼������ȶ�״̬��Ϊ�˸��õض��ȶ������۽������⣬����һ�������Ӧ��ʵ����������˫���㲽̬��б���¶ȷ����������Ϊ��������������˵������ȶ���(������̬���Բ�����ͬ���о�����)������������˵IJ��������ǰ�㿪ʼ������ʱ��ķ������α�ţ�����˫���㲽̬�˶�ʱ8���������Ϊ2�飬������1��4��6��7Ϊһ�飬������2��3��6��8Ϊ��һ�飬2���㽻��̧������£�ÿһʱ�̶�ֻ��4�������㴦��֧��״̬���˶���ijһ˲ʱ���������ĺ������ͶӰͼ��ͼ4��ʾ��ͼ������Ϊ��������γɵ�֧������Ρ�
�ɵ�2���˶�ѧ������֪����վ���������֪������û��������ĸ߶�h����sd��su��Ĺ�ϵ��
 (6)
(6)
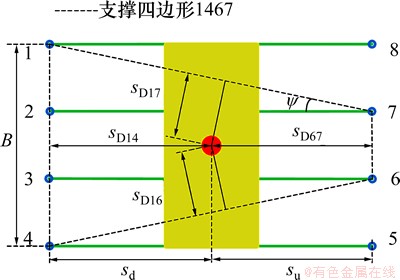
ͼ4 ˫���㲽̬�������ļ������ͶӰͼ
Fig.4 Projection figure of gravity center and touchdown points under walking of double tetrapod gait
�����������1467���γɵ�֧���������ͼ4������ʾ���������Ǻ�����ϵ����ã�
 (7)
(7)
ʽ�У�sDijΪ����ͶӰ������i��j����㹹�ɵ�֧�űߵľ��룬i��jȡֵΪ1��4��6��7��BΪ����������Ŀ��ȡ�
����������б�������¶ȷ������ʱ��֧�������Ϊ��������������֧�ű���67����14��Ϊ�㷭��ת��ʱ����ʱ��ת�ߵĴ�ֱ��ˮƽ��Ƿֱ��ǣ���r=0��ͦ�i=0�㡣����ʽ(4)��(6)��(7)�ɵã�
 (8)
(8)
�Բ���֧�ű���17����64��Ϊ�㷭���ʱ����ת�ᴹֱ��Ǧ�r������ֵ��ͨ��ʽ(9)��ã�
 (9)
(9)
��ʽ(4)��(6)��(7)��(9)���������
 (10)
(10)
ʽ�У�

 s=su+sd��
s=su+sd��
��ʽ(8)��(10)��õ���Сֵ��Ϊ��ǰ�����˵��ȶ�ԣ�����ӹ�ʽ(8)��(10)���Կ������ڻ����˽ṹ����ȷ��������£��ȶ�ԣ����վ�������б�ǶȺͻ������ĵĸ߶��йء�
3.2 �����з�����������ȶ��Է��������
����б����Ǻͻ������ĵı仯����ʽ(8)��(10)������ֱ�۵ػ�û����������ȶ��Եı仯���ơ�Ϊ�˶��Եõ�����������ȶ�ԣ����б����Ǻͻ������ĸ߶ȵĹ�ϵ����������ȶ��Է��档Ӧ��MATLAB������վ������б�Ƕȴ�0��仯��35�㣬���ĸ߶ȴ�70 mm�仯��260 mm����������˫���㲽̬��ʽ����ʱ�ľ�̬�ȶ�ԣ�Ƚ��з���õ���ͼ5��ʾ�����ߣ�����ͼ5(a)��ʾΪ�������������ת��14���ȶ�ԣ��SNESM14���������������ת��67���ȶ�ԣ��SNESM67�Ա����ߡ���ͼ5��֪������б���¶Ⱥ����ĸ߶ȵ����ӣ������˵��ȶ��Խ��ͣ�������߶�С��ijһֵʱ(����Ϊ157 mm)���������������ת��14���ȶ�ԣ�ȴ����������������ת��67���ȶ�ԣ�ȣ���������߶ȴ��ڸ�ֵʱ���������������ת��14���ȶ�ԣ�������½�����С���������������ת��67���ȶ�ԣ��������ڲ�����ת��17��64���ȶ�ԣ��������ͼ5(b)��ʾ���ۺ�ͼ5(a)��5(b)������֪�������˵ľ�̬�ȶ�ԣ������վ��������Լ��������ĸ߶ȵ����Ӷ����͡�
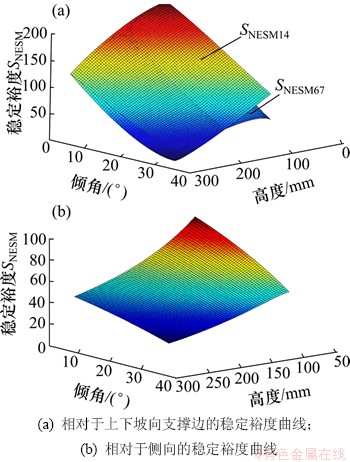
ͼ5 ��֧��������״̬���ȶ�ԣ������
Fig.5 Curve of stability margin under four support legged walking
4 ʵ���о�
Ϊ��֤ǰ�������о��ͷ���������ȷ�ԣ�Ӧ�ð��������ʵ���������һ�����������ȶ��Բ���ƽ̨������������˷��ڿ��㸲��ľ���ϣ���ģ�ⲻͬ������ǣ�ʹ��dSPACE����������ƽ̨�ɼ����������֧����R��ʵ���л�����ͬ������˫�����㲽̬���ߡ���ʵ�������ʹ�������������ڻ��������ĵ����Ϸ�ƽ���ڻ��巽��Ի����˻���ʩ������F (ʩ���������ĵĸ߶ȱ��ֲ���)���������������֧�����ı仯�������֧����R=0ʱ��˵�������˴����ٽ��ȶ�״̬����ʱ����������������������Ϊ�����Ŷ�������ֵ���Լ�ӱ����ȶ��̶ȣ������Ŷ���Խ���������˵ֿ��Ŷ�������Խǿ��Ҳ���ǻ�����Խ�ȶ�����������ʵ��ԭ�����Ի����˽����ȶ���ʵ�飬���3�ֵ��͵������¶ȣ�(0�㣬15���20��)�����ĸ߶ȴ�70 mm��230 mmÿ��20 mm����1�Ρ�ʵ���õIJ�ͬ���ĸ߶��µļ����Ŷ������������õ���SNESM���߶Ա���ͼ6��ʾ������ͼ6�е�ʵ�����߿�֪���������ĵĸ߶ȵ����ӣ������˵��˶��ȶ��Ա���б�����Ϊ0��ʱ����������������������ȶ�����ͬ����˼����Ŷ��������غϣ�ʵ��ͷ����õ����߽���һ�£���б����Dz�Ϊ0�㣬�����ĸ߶�С��ijһ�ٽ�ֵʱ��������������������㷭���ȶ�ԣ�ȴ����������㷭���ȶ�ԣ�������ĵĸ߶ȳ������ٽ�ֵʱ�������������㷭���ȶ�ԣ���������������ȶ�ԣ����2�ֲ�ͬ�¶ȵ��ٽ����ĸ߶�ֵ�ֱ�Ϊ160 mm��220 mm������ֵ������ȡ��157 mm���в�ͬ��ƫ��ij�����Ҫ��ʵ���д��ڵ�һЩ�����ɵģ���������������һ�µģ���֤���ٽ����ĸ߶ȵĴ��ڡ��Ա�6(a)��6(b)��6(c)���Կ�������������0�㣬15���20��б���ϵ�������Ŷ����ֱ�Ϊ75��70��50 N����֪����վ������б�Ƕȵ����ӣ������˵��ȶ��������͵ģ�����ֵ������ý����ͬ��ͼ6������ʵ������MATLAB�����������Ի����Ǻϣ��Ӷ���֤�˱���������ȶ����ж���������ȷ�ԡ�
5 ����
1) Ϊ��ȷ���۷�з�����˵��˶��ȶ��ԣ�ͨ����Բ��ʽ��˽ṹ�İ�������������˶�ѧ������Ӧ�ù淶�������ȶ�ԣ���оݣ�����˰���������ڸ��ָ��ӻ����¾�̬�ȶ�����ѧ����������
2) ��������ﳣ���õ�˫���㲽̬���߷�ʽ�µĻ������ȶ�ԣ�Ƚ����˷����о����ó��˾�̬�ȶ�ԣ���������վ������ǡ�����߶ȵĺ�����ϵ����֤�����ٽ����ĸ߶ȵĴ��ڡ�
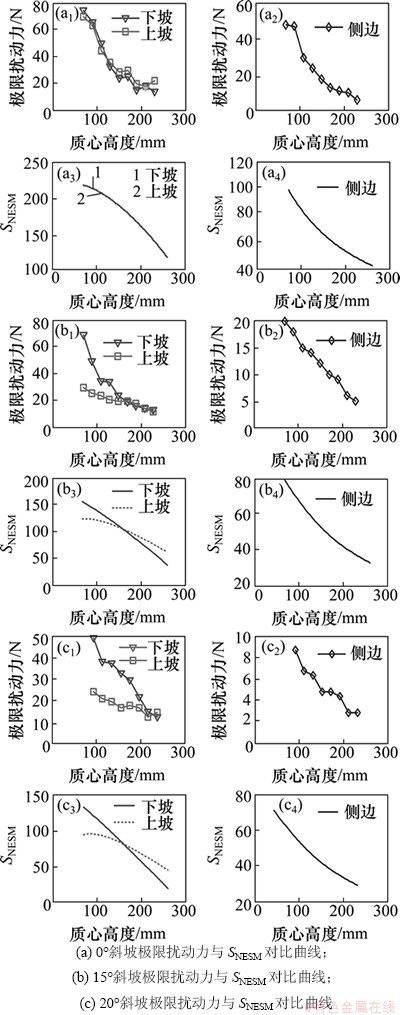
ͼ6 ��ͬ���ĸ߶ȼ����Ŷ�����SNESM����
Fig.6 Limit disturbance force and SNESM curve of different centroid heights
3) ��������˾�̬�ȶ�ԣ����ѧ���㷽������Ч���ܹ�ȷ�ж���з�������˶��������ȶ��Լ��ȶ�ԣ���仯�����ȶ����ж�����Ϊ�о���������������ڸ��ӵ�ò�����µ����߷�ʽ�Լ�ʧ��״̬�µ���̬�ָ������ṩ�����ݡ�
�ο����ף�
[1] Hirose S, Tsukagoshi H, Yoneda K. Normalized energy stability margin and its contour of walking vehicles on rough terrain[C]// Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, 2001: 181-186.
[2] �ƿ���, ������, ��Ϊ. ���㲽�л������о�״����չ��[J]. ������Һѹ, 2008, 36(5): 187-191.
HUANG Junjun, GE Shirong, CAO Wei. Multi-feet walk robot research and its forecast[J]. Machine Tool& Hydraulics, 2008, 36 (5): 187-191.
[3] �¸�, ��ϣ��, �Ƽ̺�, ��. �ʺϺ��е��������������Spider������[J]. ���ִ�ѧѧ��(��ѧ��), 2011, 41(3): 765-770.
CHEN Fu, ZANG Xizhe, YAN Jihong, et al. Development of navigable hexapod biomimetic robot spider[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(3): 765-770.
[4] ���, �����, ̸����. ���ع�ģ��������㷭�ȶ����о�[J]. ������, 2005, 27(3): 241-246.
LI Bin, LIU Jinguo, TAN Dalong. Research on the tipover stability of a reconfigurable modular robot[J]. Robot, 2005, 27(3): 241-246.
[5] McGhee R B, Frank A A. On the stability properties of quadruped creeping gaits[J]. Mathematical Biosciences, 1968, 3(3): 331-351.
[6] Hardarson F. Stability analysis and synthesis of statically balance walking for quadruped robots[D]. Stockholm: Royal Institute of Technology, 2002: 47-65.
[7] Garcia E, Gonzalez P. An improved energy stability margin for walking machines subject to dynamic effects[J]. Robotica, 2005, 23 (1): 13-20.
[8] ������, �Ʋ�, ������. ��������������ȶ����ж�����[J]. ��������ҵ��ѧѧ��, 2008, 40(7): 1063-1066.
WANG Pengfei, HUANG Bo, SUN Lining. Stability judging method for quadruped bionic robot[J]. Journal of Harbin Institute of Technology, 2008, 40 (7): 1063-1066.
[9] �ﺣ��, ���ڵ�, ����, ��. ����ʽ�������㸲�ȶ��Է��������[J]. ������, 2009, 31(2): 159-165.
TIAN Haibo, FANG Zongde, ZHOU Yong, et al. Analysis and control for tumble stability of wheel-legged robot[J]. Robot, 2009, 31(2): 159-165.
[10] ����, ����ѫ, ����Ȩ. ��з�����˽�������λ���β�̬�о�[J]. ������, 2011, 33(1): 237-243.
WANG Gang, ZHANG Lixun, WANG Liquan. On alternating equal-phase wave gait of crab-like robot[J]. Robot, 2011, 33(1): 237-243.
[11] ����. �����������з�ṹ��Ƽ�ʵ���о�[D]. ������: ���������̴�ѧ���繤��ѧԺ, 2010: 13-14.
LI Lin. The structure design and experimental study of the multi-legged bionic[D]. Harbin: Harbin Engineering University. College of Mechanical and Electrical Engineering, 2010: 13-14.
[12] ����, ����ѫ, ����Ȩ. �����з�����˲�̬�滮����[J]. ���������̴�ѧѧ��, 2011, 32(4): 486-491.
WANG Gang, ZHANG Lixun, WANG liquan. Research on a gait planning method for a crab-like octopod robot[J]. Journal of Harbin Engineering University, 2011, 32(4): 486-491.
[13] ���鲨, ������, ����ΰ, ��. �����Ȼ���������/��������鲽�л������е�Ӧ��[J]. ��е����ѧ��, 2009, 45(8): 24-30.
WANG Hongbo QI Zhengyan, HU Zhengwei, et al. Application of parallel leg mechanisms in quadruped/biped reconfigurable walking robot[J]. Journal of Mechanical Engineering, 2009, 45(8): 24-30.
[14] �ں�Ӣ, �Ƶ���, ������. ƽ����˻����˶�ѧ�Ͷ���ѧ���Է���[J]. ��������ҵ��ѧѧ��, 2007, 39(6): 940-943.
YU Hongying, TANG Dewei, WANG Jianyu. Analysis of the kinematic and dynamic characteristics of a planar five-bar mechanism[J]. Journal of Harbin Institute of Technology, 2007, 39(6): 940-943.
[15] ����ΰ. ��������˲��л��Ƽ��ȶ����о�[D]. ������: ���������̴�ѧ���繤��ѧԺ, 2011: 40-41.
XU Junwei. Study on walking mechanism and stability of the eight-legged robot[D]. Harbin: Harbin Engineering University. College of Mechanical and Electrical Engineering, 2011: 40-41.
(�༭ ���˱�)
�ո����ڣ�2013-10-23�������ڣ�2013-12-30
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(60875067)��������ʡ��Ȼ��ѧ�����ص�����(ZD200911)��Ŀ(Project (60875067) supported by the National Natural Science Foundation of China; Project (ZD200911) supported by the Natural Science Foundation of Heilongjiang Province, China)
ͨ�����ߣ�������(1988-)���У������������ˣ���ʿ�о�������Ҫ���¶�����������˵��о����绰��13654525356��E-mail��wanghailong@hrbeu.edu.cn
