DOI: 10.11817/j.issn.1672-7207.2016.08.019
基于线性函数型权重的RBF-ARX模型的磁悬浮球系统预测控制
覃业梅1, 2, 3,彭辉1, 3, 4,阮文杰1, 3
(1. 中南大学 信息科学与工程学院,湖南 长沙,410083;
2. 湖南商学院 计算机与信息工程学院,湖南 长沙,410205;
3. 先进控制与智能自动化湖南省工程实验室,湖南 长沙,410083;
4. 两型社会与生态文明协同创新中心,湖南 长沙,410083)
摘要:为了充分描述磁悬浮球系统具有非线性、开环不稳定性及响应快速性等特性,建立一个带线性函数权重的RBF-ARX(linear functional weight RBF networks-based ARX model, LFWRBF-ARX)模型。与一般的RBF-ARX模型不同之处在于,它引入1个与工作点状态相关的局部线性结构作为RBF网络输出层的权值。该模型随系统工作点的变化而变化,固定工作点时为局部线性ARX模型,当工作点变化时为全局非线性ARX模型。根据该模型的结构特点,采用结构化非线性参数优化方法(structured nonlinear parameter optimization method, SNPOM)来辨识模型的结构及线性、非线性参数。然后,以辨识的模型为基础,根据模型的局部线性及全局非线性特征设计预测控制器。仿真结果表明:以该建模方法建立的模型能很好地局部和全局描述磁悬浮球系统的动态特性,并能实现小球的稳定悬浮控制,比以一般ARX模型、RBF-ARX模型为基础的控制效果更好。
关键词:非线性ARX模型(NARX);线性函数权重RBF-ARX模型(LFWRBF-ARX);SNPOM(structured nonlinear parameter optimization method);非线性预测控制;磁悬浮球
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2016)08-2676-09
Modeling and predictive control of magnetic levitation ball system based on RBF-ARX model with linear functional weights
QIN Yemei1, 2, 3, PENG Hui1, 3, 4, RUAN Wenjie1, 3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. School of Computer and Information Engineering, Hunan University of Commerce, Changsha 410205, China;
3. Hunan Engineering Laboratory for Advanced Control and Intelligent Automation, Changsha 410083, China;
4. Collaborative Innovation Center of Resource-Conserving &
Environment-Friendly Society and Ecological Civilization, Changsha 410083, China)
Abstract: In order to fully describe the dynamic behavior of the magnetic levitation ball system which has nonlinear, open-loop instable and rapid response characteristics, RBF-ARX model with linear functional weights (LFWRBF-ARX model) was established. Different from a general RBF-ARX model, the LFWRBF-ARX model introduces a local linear structure as the weights of output layer. This model varies with the working-point, it is a locally linear ARX model when the working-point is fixed and it becomes a globally nonlinear ARX model when the working-point changes. According to the model structure, a structured nonlinear parameter optimization method (SNPOM) was applied to identify the structure, linear and nonlinear parameters of model. Then the identified model-based predictive controller was designed. The results show that the LFWRBF-ARX model may capture the local and global dynamic characteristics of the magnetic levitation ball system well, and the ball may be controlled to levitate stably. The control results are better than those of the general ARX model and RBF-ARX model-based control.
Key words: nonlinear ARX model; RBF-ARX model with linear functional weights (LFWRBF-ARX); SNPOM; nonlinear model predictive control; magnetic levitation (maglev) system
磁悬浮技术因其无接触、低噪声及摩擦小等特点已广泛应用于磁悬浮列车、磁悬浮轴承等工程领域。磁悬浮小球系统是一个复杂的非线性、开环不稳定的系统,易受电源及外界环境的影响,某些参数具有较强的不确定性,无法精确测量,常作为实验室研究平台。近年来,对磁悬浮装置的控制研究已取得了很多成果,如将非线性模型进行线性化处理后对磁悬浮系统采用线性控制方法[1-2],应用反馈线性化或前馈线性化技术设计非线性控制器。此外,还有研究者应用PID结合其他方法[3]或广义PID[4]来提高磁悬浮控制的鲁棒性,扩大稳定控制的范围。自适应控制[5]、变结构或滑膜控制[6]、鲁棒控制[7]、神经网络控制[8]等非线性控制方法也被用于磁悬浮系统。在实际工业过程中,一种被广泛应用的先进控制方法是预测控制,它是20世纪70年代直接从工业过程中诞生的一类基于预测模型的先进控制算法。基于线性模型的预测控制已经在实际工业过程中得到广泛应用[9-10],而基于非线性模型的预测控制(NMPC)[11]通过不断改进也逐步用于实践。KEMIH等[12]在1个线性化的磁悬浮模型基础上运用带约束的广义预测控制(GPC)来保证系统的稳定控制。WANG等[13]采用网络反馈线性化预测控制来补偿网络延时的影响。为了提高计算效率和改善实时控制性能,ULBIG等[1]建立了1个磁悬浮系统的分段仿射的线性模型,并提出1种显式NMPC策略。BACHLE等[14]通过将磁悬浮球系统非线性模型求导后实施梯度优化方法来提高稳定性和计算速度。实现预测控制的一个重要环节是建立系统的模型[15],这是实现和提高其预测控制效果的重要环节。上述研究成果大多是以磁悬浮球系统的物理模型为基础得到的。由于系统的复杂性,其物理模型和某些参数难以得到,或在一些假定条件下近似获得。而由于预测控制算法不需要深入了解被控对象的内部机理以及对模型结构要求的不唯一性,使得它可以根据工业过程的特点和控制要求,根据系统的输入输出信息建立预测控制的内部模型。这一特点使得预测控制在实际工业过程中有了更广泛的应用空间。彭辉等[16]提出在不同平衡点对磁悬浮小球建立多个线性ARX模型,实现了多模型线性预测控制,但为了实现大范围的稳定控制,需要建立一组这样的模型,同时对切换机制也提出了较高要求。QIN等[17]在工作范围内建立1个全局非线性的RBF-ARX模型,实现了磁悬浮球的非线性预测控制,获得了较好的控制效果。本文作者在此基础上提出1种改进模型,用1个具有状态回归的局部线性权函数逼近一般RBF-ARX模型中的常数系数,进一步提高模型的局部线性及全局非线性的描述能力,以便更全面地刻画磁悬浮球系统的非线性动态特性。
1 带线性函数权重的RBF-ARX模型
根据输入输出数据驱动建立系统的模型是一种常用且实用的方法,如用带外部输入的自回归(ARX)模型可以很精确地描述线性系统。但对于一般的非线性系统,它的描述能力很弱,只能在局部小范围内对非线性系统的局部动态特性进行刻画,这使复杂系统基于此模型实施全局有效控制难度很大。为了更好地描述非线性系统的动态特性,将线性ARX模型扩展成非线性ARX模型,即1个非线性系统可用如下一般NARX表示:

 (1)
(1)
其中: 表示非线性结构;y(t)为系统输出量;u(t)为系统输入量;ny和nu分别为输出与输入的阶次;ξ(t)为白噪声。不同类型的函数可以被用来近似式(1)中的系统未知结构,如用可变化的多项式[18]、模糊神经网络[19]或径向基函数(RBF)神经网络[17, 20]作为各回归量的可变系数。这些模型能较好地描述非线性系统,而基于这些模型的控制也取得了较好的控制效果。RBF网络具有很强的函数逼近能力,通用结构下连接隐含层与输出层的权值一般为常数,为了达到较高的逼近精度,所需的隐含节点数较多。为了减少节点数目及充分利用RBF的局部逼近能力,甘敏等[21]扩展了RBF神经网络,将RBF网络的常数系数进一步用1个回归权值逼近,并用来预测混沌时间序列,取得了较高的预测精度。为了提高模型的非线性描述能力,本文以此为参考,将RBF网络的常数系数用1个依存于工作点状态的局部线性函数逼近,并用该改进的RBF网络来逼近NARX模型(1)的非线性回归系数,构建1个带依存于系统工作点状态的局部线性函数权值的RBF-ARX模型。不失一般性,假设仅有1个输出节点,改进的RBF结构如图1所示。
表示非线性结构;y(t)为系统输出量;u(t)为系统输入量;ny和nu分别为输出与输入的阶次;ξ(t)为白噪声。不同类型的函数可以被用来近似式(1)中的系统未知结构,如用可变化的多项式[18]、模糊神经网络[19]或径向基函数(RBF)神经网络[17, 20]作为各回归量的可变系数。这些模型能较好地描述非线性系统,而基于这些模型的控制也取得了较好的控制效果。RBF网络具有很强的函数逼近能力,通用结构下连接隐含层与输出层的权值一般为常数,为了达到较高的逼近精度,所需的隐含节点数较多。为了减少节点数目及充分利用RBF的局部逼近能力,甘敏等[21]扩展了RBF神经网络,将RBF网络的常数系数进一步用1个回归权值逼近,并用来预测混沌时间序列,取得了较高的预测精度。为了提高模型的非线性描述能力,本文以此为参考,将RBF网络的常数系数用1个依存于工作点状态的局部线性函数逼近,并用该改进的RBF网络来逼近NARX模型(1)的非线性回归系数,构建1个带依存于系统工作点状态的局部线性函数权值的RBF-ARX模型。不失一般性,假设仅有1个输出节点,改进的RBF结构如图1所示。
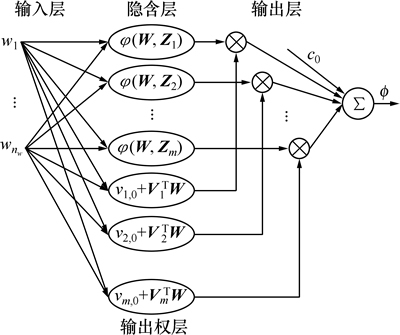
图1 带线性函数权值的RBF网络结构
Fig. 1 RBF network structure with linear functional weight
图1中,输出层的输出为

 (2)
(2)
其中: 为径向基函数;
为径向基函数; ,为系统工作点的状态向量;nw为W的维数;Z为m个网络的中心;
,为系统工作点的状态向量;nw为W的维数;Z为m个网络的中心; ,为引入的随工作点状态向量W变化的输出权函数;c0为偏差。当vk,i(i=0,1,…,nw)为常数时,vk为工作点状态的线性函数。将一组上述RBF网络引入到非线性ARX模型(式(1))中,用来逼近输入、输出各回归量的非线性系数,从而构建1个带有与工作点状态相关的局部线性的权函数作系数的RBF-ARX模型(LFWRBF-ARX)。其具体结构如式(3)所示。这里选取高斯函数作为RBF径向基函数。
,为引入的随工作点状态向量W变化的输出权函数;c0为偏差。当vk,i(i=0,1,…,nw)为常数时,vk为工作点状态的线性函数。将一组上述RBF网络引入到非线性ARX模型(式(1))中,用来逼近输入、输出各回归量的非线性系数,从而构建1个带有与工作点状态相关的局部线性的权函数作系数的RBF-ARX模型(LFWRBF-ARX)。其具体结构如式(3)所示。这里选取高斯函数作为RBF径向基函数。

 (3)
(3)
其中:y(t)为系统输出量;u(t)为系统输入量; 表示2-范数;ny和nu分别为输出y(t)和输入u(t)的阶次。式(3)中的W(t-1)是时变的系统工作点状态,可以是输入信号、输出信号或系统的其他可测信号及其组合。该模型具有ARX的回归结构,对RBF网络中心的要求较宽松,即使所有的RBF网络共用同一个中心,回归系数也会不同,因而RBF网络需要的节点数目很少,而且该结构中回归权函数vk也由系统的工作点状态W(t-1)决定,可能使RBF网络需要的节点数目更少。当W(t-1)确定后,式(3)就是1个简单的线性ARX模型,因此,能反映系统的局部线性特征。而从整体来看,由于工作点状态W(t-1)是不断变化的,故模型(3)也显示了全局的非线性特性。这种方法在某些神经网络系统中表现出很好的性能[22],而且这样处理后的结构可以大大减少网络及其中心的数目,减少计算时间,为快速系统实施基于模型的预测控制奠定了基础。
表示2-范数;ny和nu分别为输出y(t)和输入u(t)的阶次。式(3)中的W(t-1)是时变的系统工作点状态,可以是输入信号、输出信号或系统的其他可测信号及其组合。该模型具有ARX的回归结构,对RBF网络中心的要求较宽松,即使所有的RBF网络共用同一个中心,回归系数也会不同,因而RBF网络需要的节点数目很少,而且该结构中回归权函数vk也由系统的工作点状态W(t-1)决定,可能使RBF网络需要的节点数目更少。当W(t-1)确定后,式(3)就是1个简单的线性ARX模型,因此,能反映系统的局部线性特征。而从整体来看,由于工作点状态W(t-1)是不断变化的,故模型(3)也显示了全局的非线性特性。这种方法在某些神经网络系统中表现出很好的性能[22],而且这样处理后的结构可以大大减少网络及其中心的数目,减少计算时间,为快速系统实施基于模型的预测控制奠定了基础。
2 磁悬浮球系统的建模与辨识
本文的研究对象是本实验室的1套磁悬浮小球控制系统。该套装置主要包括2部分,即由磁悬浮本体和控制该装置的1台计算机组成。磁悬浮小球控制装置的本体如图2所示。电磁铁、电源功放模块、光电传感器、LED光源和被控钢球等元件共同组成了磁悬浮小球控制装置的本体。小球质量为 22 g,直径为 12.5 mm,运动范围为 0~18 mm。该实验装置是1个典型的吸附式单自由度的磁悬浮控制系统,只能控制被控对象的上、下移动,为单输入单输出系统。电磁铁下表面为原点,竖直向下的方向为y轴负方向,电磁铁与小球间的空隙为位移。控制目标是使钢球稳定悬浮在指定的位置或跟踪给定轨迹。一般地,基于磁悬浮机理建立的模型是在一定假设条件下建立的近似模型,存在较大非线性误差。为了提高非线性逼近能力,本文按前面提出的建模方法构建磁悬浮小球系统的线性权函数RBF-ARX模型(LFWRBF-ARX)。模型具体结构与式(3)所示的相同,电磁铁的控制电压为输入控制变量u(t),钢球向下的位移为输出变量y(t),将输出序列作为工作点的状态,即W(t-1)=[y(t-1),…,y(t-nw)]T。
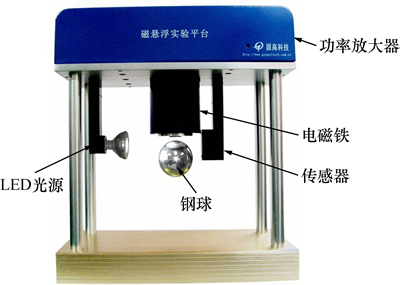
图2 磁悬浮实验平台
Fig. 2 Platform of maglev experiment system
LFWRBF-ARX模型的辨识主要包括模型的结构及参数辨识,模型的结构主要取决于各变量的阶次即ny,nu,m和nw。从式(3)可看出,该模型的参数含有线性参数和非线性参数。这类模型可应用PENG等[23]针对神经网络类模型提出的结构化非线性参数优化方法(SNPOM)。该方法根据模型结构特点,将模型参数分为线性参数和非线性参数,用Levenberg- Marquardt方法(LMM)来优化非线性参数,用最小二乘法(LSM)优化线性参数,优化过程以非线性参数循环优化为中心,交叉优化线性参数。这种方法不同于非结构化的一般梯度搜索方法,搜索最优解的过程更加灵活、快速、有效,尤其对于线性参数较多的系统,而且它是一种离线辨识方法。模型(3)包括非线性参数 和
和 、线性参数c0和
、线性参数c0和 ,因此,模型(3)共有(1+m(nw+1))(ny+nu+1)个线性参数和(m+m×nw)个非线性参数待估计,线性参数远多于非线性参数,故本文采用该优化方法。模型的阶次估计以Akaike信息准则(AIC值)最小为衡量标准,同时综合考虑阶跃响应的动态特性。
,因此,模型(3)共有(1+m(nw+1))(ny+nu+1)个线性参数和(m+m×nw)个非线性参数待估计,线性参数远多于非线性参数,故本文采用该优化方法。模型的阶次估计以Akaike信息准则(AIC值)最小为衡量标准,同时综合考虑阶跃响应的动态特性。
针对该磁悬浮小球系统,在MATLAB/ SIMULINK2010b工作环境下,在PID控制策略下用PCI1711数据采集卡采集钢球位移、电磁铁控制电压,采样周期为5 ms。为了使系统可辨识,要求小球尽可能在较大范围内稳定悬浮,同时在系统的输入端加入白噪声信号以便更好地激发其动态模式。应用PID控制策略采集的观测数据共取8 000个(如图3所示),其中前4 000个数据用于优化模型阶次和参数,后4 000个数据用于测试所估计的模型性能。从图3可看出:该组数据设置钢球跟踪1个变化多样的信号,尽可能地激发系统的各种模态,便于辨识、估计得到与实际系统更逼近的模型。利用这些观测值,应用SNPOM方法估计LFWRBF-ARX模型参数,综合考虑AIC值及阶跃动态特性的原则反复训练和比较,得到模型阶次为ny=5,nu=3,m=1和nw=1,训练和测试结果如图4和图5所示。
从图4可以看出:LFWRBF-ARX模型输出非常接近实际输出数据,建模的误差非常小,大多在-0.04~0.04 mm之内,并且基本呈高斯状分布。而从图5可见测试的模型输出与实际输出之间误差也很小,从误差直方图可看出误差有1个非常小的偏移,但整体仍呈高斯分布。这验证了该建模方法应用在磁悬浮球系统中的可行性及有效性。从图5还可看出:当小球跟踪阶跃变化时,模型输出与实际输出的误差比变化曲线平缓时的误差要稍大,这也显示了阶跃响应能充分显示系统的动态性能。
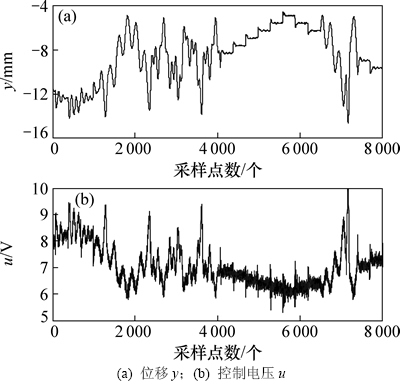
图3 磁悬浮球系统的观测结果
Fig. 3 Observation results for maglev ball system
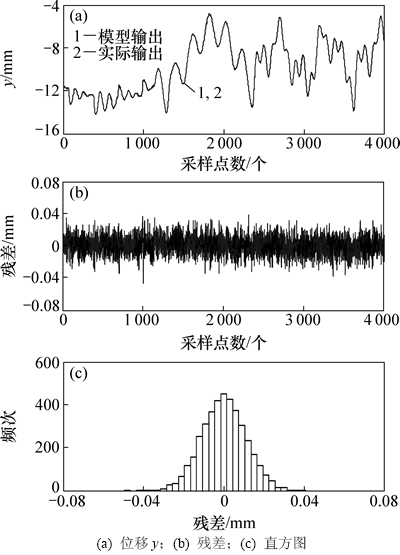
图4 LFWRBF-ARX训练数据的输出、建模残差及其直方图
Fig. 4 Output, modeling residual and its histogram of LFWRBF-ARX for training data
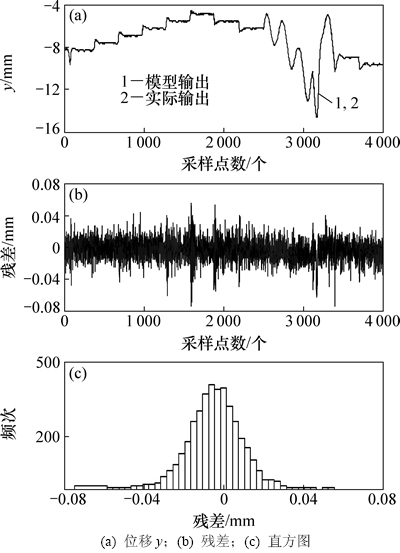
图5 LFWRBF-ARX测试数据的输出、建模残差及其直方图
Fig. 5 Output, modeling residual and its histogram of LFWRBF-ARX for testing data
3 磁悬浮球系统的预测控制器设计
LFWRBF-ARX模型依存于工作点状态,在某一时刻工作点固定时,该模型等同于1个线性ARX模型。因此,根据这一特点可以设计基于局部线性ARX模型的预测控制器。而随着时间的变化,该线性控制器也随之变化,实现了基于全局非线性RBF-ARX模型的预测控制。为了设计预测控制器,有必要将模型(3)转换为状态空间模型。根据已经辨识出的模型(3),定义如下状态变量:
 (4)
(4)
式中: 。
。
根据第2节模型辨识结果,kn=5。磁悬浮球系统(3)的状态空间模型为
 (5)
(5)
其中:
 (6)
(6)
注意: 表示系数与工作点状态W(t-1)相关。从全局非线性LFWRBF-ARX模型可得到1个局部线性的ARX模型,从而可以设计磁悬浮球系统的预测控制器。首先定义如下状态向量:
表示系数与工作点状态W(t-1)相关。从全局非线性LFWRBF-ARX模型可得到1个局部线性的ARX模型,从而可以设计磁悬浮球系统的预测控制器。首先定义如下状态向量:
 (7)
(7)
其中: 为多步预测状态向量;
为多步预测状态向量; 为多步预测输出变量;
为多步预测输出变量; 为多步预测控制变量;Np和Nc分别为预测时域和控制时域。根据模型(5),可得到如下多步预测状态空间模型:
为多步预测控制变量;Np和Nc分别为预测时域和控制时域。根据模型(5),可得到如下多步预测状态空间模型:
 (8)
(8)
需注意的是: ,
, 和
和 均与W(t)相关,可以通过式(5)和(6)得到[17]。式(8)可以进一步改写为
均与W(t)相关,可以通过式(5)和(6)得到[17]。式(8)可以进一步改写为
 (9)
(9)
则预测控制器的目标函数为
 (10)
(10)
其中: ;Q,R1和R2分别为输出误差、
;Q,R1和R2分别为输出误差、 和
和 的控制权矩阵;
的控制权矩阵;
 为期望输出变量;
为期望输出变量;
 为控制增量。在磁悬浮球系统应用中,2次规划求解时间可能超过系统采样时间5 ms,因此,考虑忽略式(10)中的输出约束,采用事后输入约束准则,将式(9)代入式(10),得到最优控制量
为控制增量。在磁悬浮球系统应用中,2次规划求解时间可能超过系统采样时间5 ms,因此,考虑忽略式(10)中的输出约束,采用事后输入约束准则,将式(9)代入式(10),得到最优控制量 :
:
 (11)
(11)
其中:
 (12)
(12)
令 ,可以直接得到最优控制量:
,可以直接得到最优控制量:
 (13)
(13)
优化后对控制量u(t)进行约束:
if  且
且 ,
, ;
;
if  ,
, ;
;
if  ,
, ;
;
if  ,
, ;
;
if  ,
, 。
。
从式(13)可以看出中仅仅取第1个元素 作为有效输入。这种基于LFWRBF-ARX模型的预测控制器不需在线求解模型参数,既减少了控制的复杂度,又节约了计算时间。
作为有效输入。这种基于LFWRBF-ARX模型的预测控制器不需在线求解模型参数,既减少了控制的复杂度,又节约了计算时间。
4 仿真控制
为了评估磁悬浮球系统基于LFWRBF-ARX模型的预测控制(LFWRBF-ARX-MPC)的性能,本文在MATLAB /SIMULINK 2010b环境下设计1个MPC控制系统,对钢球进行仿真控制。控制系统结构图如图6所示。
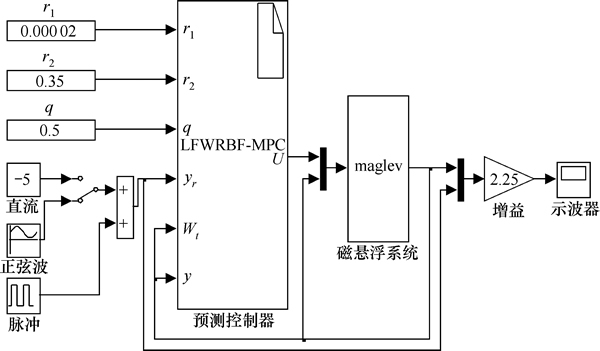
图6 磁悬浮球系统的LFWRBF-ARX-MPC
Fig. 6 LFWRBF-ARX-MPC structure of maglev ball system
图6中,r1,r2和q为式(13)中的标量权值,即 ,
, 和
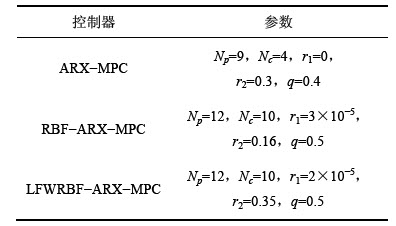
和 。为了保证钢球能稳定悬浮,通过反复试验,最终基于LFWRBF-ARX的预测控制参数如表1所示。
。为了保证钢球能稳定悬浮,通过反复试验,最终基于LFWRBF-ARX的预测控制参数如表1所示。
为了显示LFWRBF-ARX-MPC的控制性能优势,将其控制结果与1个基于线性ARX模型的MPC (ARX-MPC)和1个基于非线性RBF-ARX模型的MPC (RBF-ARX-MPC)对磁悬浮球的控制结果相比较。这2种模型的结构整体上与模型(3)相似,线性ARX模型是模型(3)中 函数为常数的模型结构,非线性RBF-ARX模型是模型(3)中vk函数为常数的模型结构。因为线性ARX模型仅能在局部小范围内描述非线性系统,故以局部小范围的yr=0.56sint-9为参考采集观测数据来辨识获得ARX模型,辨识后的模型阶次为ny=6,nu=2,m=1,nw=2。以图3中观测数据为辨识数据辨识获得RBF-ARX模型,辨识后的模型阶次为ny=7,nu=3,m=1,nw=2。为了更好地体现基于各模型的MPC的控制效果,以-9 mm(大约为钢球运动范围的中心)为中心进行阶跃响应。通过反复调试,各模型下磁悬浮球的控制参数如表1所示。
函数为常数的模型结构,非线性RBF-ARX模型是模型(3)中vk函数为常数的模型结构。因为线性ARX模型仅能在局部小范围内描述非线性系统,故以局部小范围的yr=0.56sint-9为参考采集观测数据来辨识获得ARX模型,辨识后的模型阶次为ny=6,nu=2,m=1,nw=2。以图3中观测数据为辨识数据辨识获得RBF-ARX模型,辨识后的模型阶次为ny=7,nu=3,m=1,nw=2。为了更好地体现基于各模型的MPC的控制效果,以-9 mm(大约为钢球运动范围的中心)为中心进行阶跃响应。通过反复调试,各模型下磁悬浮球的控制参数如表1所示。
表1 各控制器参数
Table 1 Controller parameters
磁悬浮球在3个控制器下对不同阶跃幅度的阶跃响应结果如图7~9所示。从图7可以看出:当阶跃幅度较小时,基于3个模型的MPC效果大致相同;在负阶跃时,基于LFWRBF-ARX模型的MPC的超调量最小。相比而言,当阶跃范围加大时,图8中LFWRBF-ARX-MPC的超调量最小,RBF-ARX- MPC的超调量适中,而ARX-MPC的超调增大很多,这将导致继续增大阶跃幅度时,ARX-MPC将无法继续控制钢球按给定的阶跃信号悬浮运动。这应归因于ARX模型的线性性能,使得该模型仅仅能描述非线性系统的局部小范围的动态特征,存在一定局限性。而LFWRBF-ARX-MPC和RBF-ARX-MPC可以使钢球持续跟踪更大的阶跃信号,如图9所示。由图9可知:当阶跃幅度达到6.75 mm时,RBF-ARX-MPC下的超调量大于LFWRBF-ARX-MPC的超调量,控制电压的震荡幅度更大。可以推断:若持续增大阶跃幅度,LFWRBF-ARX-MPC控制钢球在更宽的范围内运动时的动态性能比RBF-ARX-MPC控制下的性能优势将更明显。可见:LFWRBF-ARX模型描述非线性磁悬浮球系统的能力强于RBF-ARX模型,在基于它的预测控制器LFWRBF-ARX-MPC控制下,钢球的阶跃响应的动态性能更优。而图7说明本文所提出的LFWRBF-ARX模型描述非线性系统的局部信息的能力也并不弱于ARX模型及RBF-ARX模型。
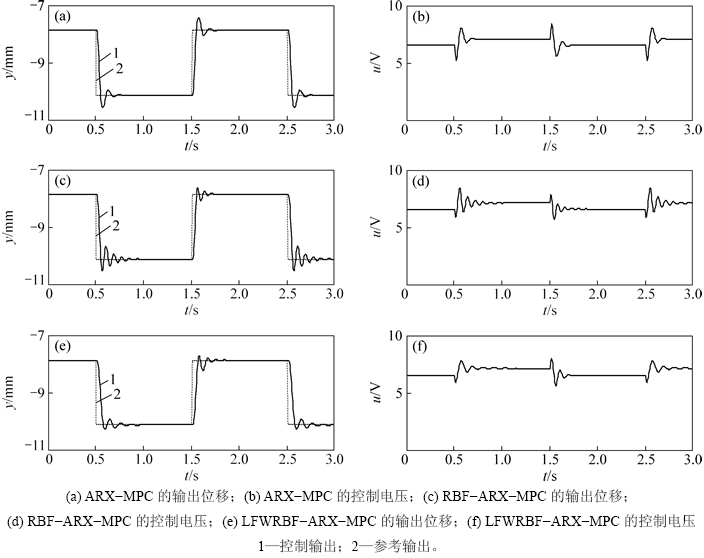
图7 幅值为2.25 mm时基于3个模型的预测控制的阶跃响应
Fig. 7 Step responses for predictive control based on three models when amplitude is 2.25 mm
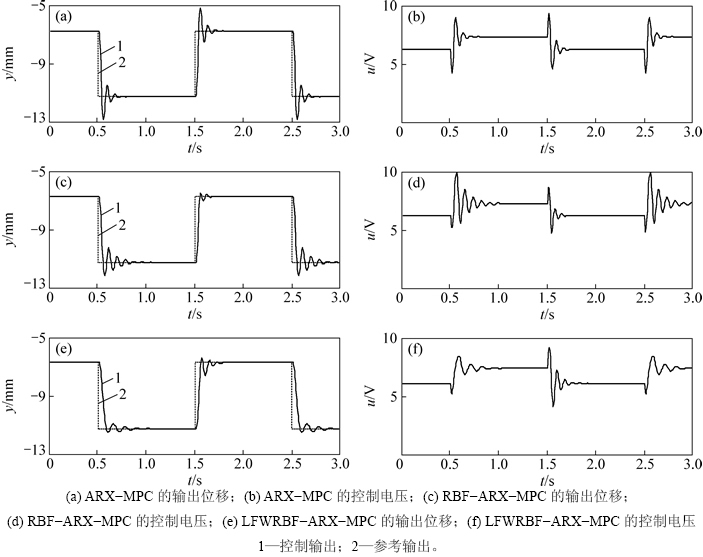
图8 幅值为4.50 mm时基于3个模型的预测控制的阶跃响应
Fig. 8 Step responses for predictive control based on three models when amplitude is 4.50 mm
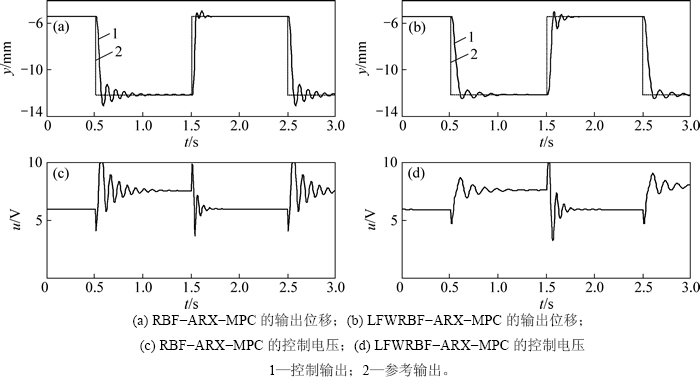
图9 幅值为6.75 mm时基于2个模型的预测控制的阶跃响应
Fig. 9 Step responses for predictive control based on two models when amplitude is 6.75 mm
5 结论
1) 采用1个与工作点状态相关的线性函数作为RBF网络的输出权值,然后以此改进的RBF网络逼近非线性ARX模型中各回归量的权值,建立了1个带线性函数权值的RBF-ARX模型。
2) 通过磁悬浮球实验系统的输入输出数据驱动建模的方法,对该系统建立LFWRBF-ARX模型,能更好地描述该系统的动态特性。
3) 结合LFWRBF-ARX模型的局部线性、全局非线性特点,设计了基于该模型的磁悬浮球系统的预测控制器。该控制器在某个工作点处为1个线性控制器,因而在线优化时间较短,为今后实现快速磁悬浮系统的实时控制提供了保障。
4) LFWRBF-ARX- MPC具有良好的局部和全局控制性能,且都优于基于ARX和基于RBF-ARX模型的预测控制效果。该建模及控制方法为快速非线性系统建模及控制提供了一种可行的方法。
参考文献:
[1] ULBIG A, OLARU S, DUMUR D, et al. Explicit nonlinear predictive control for a magnetic levitation system[J]. Asian Journal of Control, 2010, 12(3): 434-442.
[2] AHMADI I, JAVAID M A. Nonlinear model & controller design for magnetic levitation system[C]//ISPRA '09:Proceedings of the 9th Wseas International Conference on Signal Processing, Robotics and Automation. Wisconsin, USA, 2010: 324-328.
[3] LIN Chinmin, LIN Minghung, CHEN Chunwen. SoPC-based adaptive PID control system design for magnetic levitation system[J]. IEEE Systems Journal, 2011, 5(2): 278-287.
[4] MORALES R, FELIU V, SIRA-RAMIREZ H. Nonlinear control for magnetic levitation systems based on fast online algebraic identification of the input gain[J]. IEEE Transactions on Control Systems Technology, 2011, 19(4): 757-771.
[5] TORRES L H S, SCHNITMAN L, JUNIOR C A V V, et al. Feedback linearization and model reference adaptive control of a magnetic levitation system[J]. Studies in Informatics and Control, 2012, 21(1): 67-74.
[6] 谢莉莉, 刘春生. 磁悬浮球系统的神经网络辨识及变结构控制[J]. 计算机测量与控制, 2007, 15(11): 1525-1527.
XIE Lili, LIU Chunsheng. Identification based on neural network and variable structure control of a magnetic levitation system[J]. Computer Measurement & Control, 2007, 15(11): 1525-1527.
[7] 李群明, 朱伶, 徐震. 磁悬浮球的鲁棒控制器设计[J]. 中南大学学报(自然科学版), 2007, 38(5): 922-927.
LI Qunming, ZHU Ling, XU Zhen. Robust controller design of maglev ball system[J]. Journal of Central South University (Science and Technology), 2007, 38(5): 922-927.
[8] CHEN S Y, LIN F J, SHYU K A. Direct decentralized neural control for nonlinear MIMO magnetic levitation system[J]. Neurocomputing, 2009, 72: 3220-3230.
[9] QIN S J, BADGWELL T A. A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003, 11(7): 733-764.
[10] DARBY M L, HARMSE M, NIKOLAOU M. MPC: Current practice and challenges[J]. Control Engineering Practice, 2012, 20(4): 328-342.
[11] 何德峰, 丁宝苍, 于树友. 非线性系统模型预测控制若干基本特点与主题回顾[J]. 控制理论与应用, 2013, 30(3): 273-287.
HE Defeng, DING Baocang, YU Shuyou. Review of fundamental properties and topics of model predictive control for nonlinear systems[J]. Control Theory & Applications, 2013, 30(3): 273-287.
[12] KEMIH K, TEKKOUK O, FILALI S. Constrained generalized predictive control with estimation by genetic algorithm for a magnetic levitation system[J]. International Journal of Innovative Computing Information and Control, 2006, 2(3): 543-552.
[13] WANG Bo, LIU Guoping, REES D. Networked predictive control of magnetic levitation system[C]//Conference Proceedings of IEEE International Conference on Systems, Man and Cybernetics. San Antonio, Texas, USA, 2009: 4100-4105.
[14] BACHLE T, HENTZELT S, GRAICHEN K. Nonlinear model predictive control of a magnetic levitation system[J]. Control Engineering Practice, 2013, 21(9): 1250-1258.
[15] 黄琳. 为什么做, 做什么和发展战略: 控制科学学科发展战略研讨会约稿前言[J]. 自动化学报, 2013, 39(2): 97-100.
HUANG Lin. Future development in control science: why, what and strategy[J]. Acta Automatica Sinica, 2013, 39(2): 97-100.
[16] 彭辉, 高杰. 多模型切换控制方法在磁悬浮系统中的应用[J]. 控制工程, 2011, 18(2): 206-209.
PENG Hui, GAO Jie. Multi-model switching control method of magnetic levitation system[J]. Control Engineering of China, 2011, 18(2): 206-209.
[17] QIN Yemei, PENG Hui, RUAN Wenjie, et al. A modeling and control approach to magnetic levitation system based on state-dependent ARX model[J]. Journal of Process Control, 2014, 24(1): 93-112.
[18] SRINIWAS G R, ARKUN Y. A global solution to the nonlinear model predictive control algorithms using polynomial ARX models[J]. Computers & Chemical Engineering, 1997, 21(4): 431-439.
[19] GOLOB M, TOVORNIK B. Input-output modeling with decomposed neuro-fuzzy ARX model[J]. Neurocomputing, 2008, 71: 875-884.
[20] PENG Hui, OZAKI T, TOYODA Y, et al. RBF-ARX model-based nonlinear system modeling and predictive control with application to a NOx decomposition process[J]. Control Engineering Practice, 2004, 12(2): 191-203.
[21] 甘敏, 彭辉. 基于带回归权重RBF-ARX模型的混沌时间序列预测[J]. 系统工程与电子技术, 2010, 32(4): 820-824.
GAN Min, PENG Hui. Predicting chaotic time series using RBF-AR model with regression weight[J]. Systems Engineering and Electronics, 2010, 32(4): 820-824.
[22] CHEN Yuehui, YANG Bo, DONG Jiwen. Time series prediction using a local linear wavelet neural network[J]. Neurocomputing, 2006, 69: 449-465.
[23] PENG Hui, OZAKI T, HAGGAN-OZAKI V, et al. A parameter optimization method for the radial basis function type models[J]. IEEE Transactions on Neural Networks, 2003, 14(2): 432-438.
(编辑 陈灿华)
收稿日期:2015-08-29;修回日期:2015-10-10
基金项目(Foundation item):国家自然科学基金资助项目(61540037,71271215);国家自然科学基金委创新群体基金资助项目(71221061);国家国际科技合作计划项目(2011DFA10440)(Projects (61540037, 71271215) supported by the National Natural Science Foundation of China; Project (71221061) supported by the Innovative Research Groups Fund of National Natural Science Foundation of China; Project (2011DFA10440) supported by the International Science & Technology Cooperation Program of China)
通信作者:彭辉,教授,博士生导师,从事复杂系统建模、控制与优化、先进控制理论与智能自动化系统研究;E-mail:huipeng@csu.edu.cn

