���������³�����������
��Ⱥ������ �棬�� ��
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��Ϊ�����մŸ�֧�е���ƺͿ���ԭ�������һ�����͵Ĵ�������ʵ��װ�ã������䶯��ѧģ�͡�Ӧ��H����������ȿ������ۣ�ͨ������ѡȡ��Ȩ��������Ƹ�ʵ��װ�õ�H��³�������������������ֿ��Ʒ�����������ɢ������DSPϵͳʵ�������ȶ����ơ������ʵ�����������봫ͳ��PID���Ʒ�����ȣ�����H������������ƵĴ���������������и��õĶ�̬���ܣ���ϵͳ��ʱ�ij�������0.8 mm���͵�0.4 mm����̬ƫ���ԭ����0.35 mm���͵�0.10 mm���Ҿ��и������Ӧ�ٶȺ�ǿ��³���ԡ�
�ؼ��ʣ���������ϵͳ��³�����ƣ�H����������ȣ������źŴ�����
��ͼ����ţ�TP273.24 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2007)05-0922-06
Robust controller design of maglev ball system
LI Qun-ming, ZHU Ling, XU Zhen
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: In order to understand the principle of magnetic levitated bearings and verify the control methods, a device of levitating a small steel ball was designed and its dynamic model was constructed. The H�� mixed sensitivity control method was used. The selection methods for the H�� weighting functions were discussed and a H�� controller was designed to improve accuracy and robustness. Its real-time control was implemented by DSP systems. The simulation and experimental results show that the H�� controller is more effective than previous PID controller, for example, the peak overshoot decreases from 0.8 mm to 0.4 mm, and the steady-state error decreases from 0.35 mm to 0.10 mm. The response speed is quicker, and the robustness is also improved.
Key words: maglev ball system; robust control; H�� mixed sensitivity; digital signal processor (DSP)
���������������õ��������������������ʹ���ӺͶ���֮��û���κλ�е�Ӵ���һ����������֧�м�����������Ħ������ĥ����������������֧�����ɿء��ն�����ɵ�����������һϵ���ŵ㣬�Ѿ��ںܶ�����õ�Ӧ�ã���Ÿ��г����Ÿ���С��Ÿ������������ӷ�װ����̵�[1-4]��������ϵͳ�У��������Ǻ���[5]��������ϵ���Ÿ�֧�й������ȶ��ԣ����Ҿ����Ÿ�֧�еij������Ժն��������ԣ�Ӱ��ϵͳ�Ķ�̬���ܡ�Ŀǰ�㷺����PID����[6]�����ſ���[7]����Ȼ��Щ��������ʵ�֣������ڲ����������ѣ���������Ӧ�Բ��ȱ�㡣��ṹ[8]������Ӧ����[9]����Ч���ϵͳ³���ԣ�����̬���ܽϲH��³���������·�չ��Ƶ�������ſ�������[10-12]����Ӧ������㷺����J. H. Yi��[13]��Y. Uchiyama��[14]�ֱ�Ӧ��H�����ƺ�?�ۺϿ��ƾ�ȡ���˽Ϻõ�Ч�����ڴˣ������������������ƵĴ�������ʵ��װ�ã�����H��³���������۶Կ������������Ż���ƣ�����漰ʵ�����ﵽ��Ԥ��Ҫ��
1����������ϵͳ�Ķ���ѧģ��
1.1����������ʵ��ϵͳ�Ľṹ
��������ϵͳ�Ľṹ��ͼ1��ʾ����Ҫ����о����Ȧ����Դ���������������������ʷŴ����������������Ԫ����ɡ�ͨ����������������Ȧ�ĵ��������Ƶ�������Ӷ�ƽ�����������ʹ�����ڸ���ƽ��λ�ô����ȶ�����״̬��
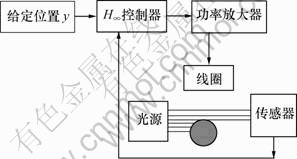
ͼ1 ��������ʵ��ϵͳ�ṹ
Fig.1 Structure of magnetic suspended ball system
1.2 ��������Ķ���ѧģ��
ͼ2��ʾΪ������������ͼ��ͼ�У�iΪ���ŵ����� Ϊ�Ŷ�������I Ϊƽ��λ�ô���������������ʱ�ĵ�����YΪƽ��λ�ô���������¶���ľ��룻yΪ��������¶����λ�ƣ�
Ϊ�Ŷ�������I Ϊƽ��λ�ô���������������ʱ�ĵ�����YΪƽ��λ�ô���������¶���ľ��룻yΪ��������¶����λ�ƣ� Ϊ����ƫ��ƽ��λ�õ�λ�ƣ����귽��涨����Ϊ����
Ϊ����ƫ��ƽ��λ�õ�λ�ƣ����귽��涨����Ϊ����
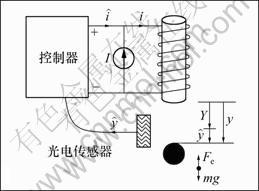
ͼ2 �Ÿ�����������
Fig.2 Force analysis for ball
�����������ƽ��λ�������˶�ʱ����紫������С��λ�õı仯�źţ������������������������ŵ���������������ƽ��λ�ô�����֮�������������ƽ��λ�������˶�ʱ�����������С���Ƶ�����������ʹ����ظ���ƽ��λ�ô����Ӷ�ʵ�ֶ�̬������
���ݵ�ų��������̼��鹦ԭ���ɵõ�����ļ��㹫ʽΪ��

��ϵͳ�У�L1=123.6 mH��L0=8.3 mH��a=4.2 mm��
��ʽ(2)����ʽ(1)��ȡƫ���õ��������ʽΪ��
 �� (3)
�� (3)
С����˶�����Ϊ��

���������ƽ��λ��ʱy=Y��i=I����ʽ(3)����ʽ(4)���������¹�ϵ������
 �� (5)
�� (5)
��ʽ(5)���Կ��������ڸ����ĵ���I�����������λ��YҲΪһȷ��ֵ��
��
 ;
;  �� (6)
�� (6)
�������������ƽ��λ�ô�̩��չ������ȥ�߽���õ����Ի��������£�
 ���� �� (7)
���� �� (7)
��ʽ(5)��(6)��(7)����ʽ(4)���Եó�С�����Ի���������˶��ַ��̣�
 �� (8)
�� (8)
��ʽ(7)�������ϱ任���Ӷ��õ�ϵͳ�Ŀ������ݺ�����
 �� (9)
�� (9)
ʽ�У�
 ��
�� ��
��
��ʽ(9)���Եó�������С��ϵͳ�Ŀ�������Ϊ��

���Կ�������������ʱϵͳ��1������λ�ڸ�ƽ����Ұ�ƽ�棬������ϵͳ�Dz��ȶ��ģ�������÷������ơ�
���Ĵ�����ϵͳ�У���������m=60 g��ƽ��λ��Y=13 mm��ƽ��ʱ��̬����I=452 mA������ز����ֱ����ʽ(8)��(9)�ɵ�ϵͳ����Ȧ���� ������λ��
������λ�� �Ŀ������ݺ���Ϊ
�Ŀ������ݺ���Ϊ
 �� (10)
�� (10)
2���Ÿ����³�����������
2.1 ³�������������
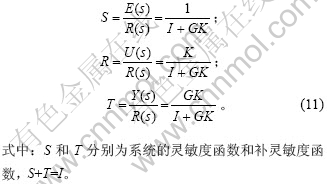
������ϵͳ�Ŀ���Ŀ����ͨ���������ڵ������Ȧ�еĵ����仯��i��ʹ�����Ӵ����ȶ������ڿ��С�����ʽ(10)�Ĵ��ݺ���ģ�ͣ�Ӧ��³���������ۣ��ɽ����������趨Ϊ��������ȿ������⣬ͨ������ѡȡ��Ȩ����ʹϵͳ�������Ⱥ����Ͳ������Ⱥ�����ϣ���Ĺ��ɱ仯������ϵͳ����ĸ�������ָ��Ҫ��H����������ȿ��Ƶı��ṹ��ͼ3��ʾ[10-14]��ͼ�У�GΪ�������ݺ�����KΪҪ���³����������r��e��u��d��n��z��y�ֱ�Ϊ�ο����롢���������������롢�������롢��������������ϵͳ�����ϵͳ����� ��W1(s)��W2(s)��W3(s)�ֱ�Ϊϵͳ������Ȩ�����������Ȩ��³��Ȩ���Ӳο�����r��e��u��y�ıջ����ݺ����ֱ�Ϊ��
��W1(s)��W2(s)��W3(s)�ֱ�Ϊϵͳ������Ȩ�����������Ȩ��³��Ȩ���Ӳο�����r��e��u��y�ıջ����ݺ����ֱ�Ϊ��
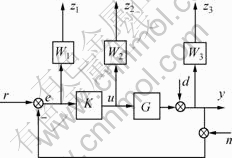
ͼ3 H���������������ı����
Fig.3 Standard model of  mixed sensitivity problems
mixed sensitivity problems
���ڴ�������ϵͳ���������ĸ����ƽ��λ����Ϊ������룬r��u��Ϊ���������룬�����������ƫ��λ����Ϊ�����ܿض����������Ÿ����H����������ȿ���������������Ѱ���������������������K(s)��ʹϵͳ�ջ��ȶ����ұջ�ϵͳ�������ջ����ݺ��� ����
����
 (�áݦ�0)�� (12)
(�áݦ�0)�� (12)
���ʹ��������ϵͳ�Ŀ����������˻�������ȿ���������⡣
2.2 ��Ȩ������ѡ��
³������������ƹ�����Ҫ�Ƕ�S��T��R�ļ�ȨW1(s)��W2(s)��W3(s)��ѡ����̡���ϵͳ�У���Ȩ��ѡ����ѭ����ԭ��[10-13]��
W1(s)��ѡ����S��ϵͳ�ο����뵽�������Ĵ��ݺ�����Ҳ��ϵͳ�������뵽ϵͳ����Ĵ��ݺ��������ڴ�����ϵͳ,����ͨ�������ڵ�Ƶ��Χ��Ϊ�����Ƹ��ţ�ϣ��S�����澡��С�����ԣ���Ƶ�εļ�ȨֵӦ��������ѡW1(s)ӦΪ���е�ͨ���ʵ���ʵ������������W1��ӳ�˸��ŵ�Ƶ�����ԡ�����Ƶ���ŵ�Ƶ��Ϊ��1����ȡW1(s)��ת�۽�Ƶ�ʦءݦ�1�����������㣬��ɽ�W1ȡΪ������������W1(s)���㣺
 ��
�� �� (13)
�� (13)
ʽ�У� ��ʾ�������ֵ��
��ʾ�������ֵ��
W3(s)��ѡ����W3(s)��ʾ�����㶯�ķ����磬Ƶ������Ӧ���и�ͨ���ʣ�������б�ʿ�ȡ��Щ���Ա�֤�ջ�ϵͳ�Ը�Ƶ���ŵ����ơ����ڸ�����Ƶ�ʣ����Ҫ��S�������С����ôT������ΪI��������ָ��ɿ���W3(s)�����С���Ӷ�������ϵͳ��³���ȶ��ԣ�����T�����棬�����Ʊ�����S��������
������ì�ܵİ취���ڵ�Ƶ���Լ�С�����Ⱥ���S������Ϊ�������ڸ�Ƶ���Լ�С���������Ⱥ���S������Ϊ������W3(s)ȡΪ���и�ͨ���ʵ���������������ʹW1(s)��W3(s)��Ƶ�����ص��������ߵļ���Ƶ��֮����һ�����롣��ʵ�ʹ����У����ŵ�Ƶ����Ϊ��Ƶ�źţ���δ��ģ��̬�����Ǹ�Ƶ�źţ���ˣ������������˼���Ǻ����ġ�
W2(s)�Ƕ�R�ļ�Ȩ���ۺ�������ʾ�����㶯�ķ����硣����W2(s)�����¼��������ã�
a. ����W2(s)���������ƿ�����u�Ĵ�С����ֹϵͳ��ʵ�ʹ��������в������صı��������Լ����������������ִ��������������Ƕȳ�����W2(s)�ľ�̬����Ӧ���ʵ���
b. W2(s)��ѡ���ϵͳ�Ĵ���Ҳ�кܴ��Ӱ�졣ʵ���ϣ���W2(s)�ķ�ֵ��С���ʱ����������Ŀ���ϵͳ����Ƶ�����ɴ��С��Ϊ�˱�֤ϵͳ���㹻�Ĵ�����W2(s)�ľ�̬����Ӧ���ʵ�С��
Ϊ�����ӿ������Ľ״Σ�ͨ���ɽ�W2(s)ȡΪһ��ʵ������ʱ��ʾ�����㶯Ϊһ�����硣��һ����Χ�ڣ�W2ȡֵԽ���� ԽС���ڻ������������У�W1��W3ȷ����W2������Ϊһ����Ȩ�������е������Ի���е�Ƶ���нϴ�³���ȶ��ԵIJ����㶯��Χ��
ԽС���ڻ������������У�W1��W3ȷ����W2������Ϊһ����Ȩ�������е������Ի���е�Ƶ���нϴ�³���ȶ��ԵIJ����㶯��Χ��
3 ʵ�����
����ǰ����ܵ����ԭ���ڱ��Ÿ���ϵͳ�У����Ȱ������Ⱥ��� �ļ�Ȩ����W1(s)ѡ��Ϊһ������������
�ļ�Ȩ����W1(s)ѡ��Ϊһ������������
 ��
�� �� (14)
�� (14)
����ǰ����ܵ� ��������Ʒ����ͼ�Ȩ���ѡ��ԭ����������������ʵ��Ƚϣ�����ȷ��ѡ���s=1, ks=500, fs=6.605��10-5��
��������Ʒ����ͼ�Ȩ���ѡ��ԭ����������������ʵ��Ƚϣ�����ȷ��ѡ���s=1, ks=500, fs=6.605��10-5��
�������Ⱥ���T(s)�ļ�Ȩ����ΪW3(s)����ʾ�����㶯�ķ����磬����ѡ��Ϊһ�����Ķ���ʽ
 �� (15)
�� (15)
������ʵ��ȽϺ�ȷ��ѡȡ ��
�� ��
�� ��
��
�ڻ������������У�W2(s)������Ϊһ����Ȩ�������е������Ի���е�Ƶ���нϴ�³���ȶ��ԵIJ����㶯��Χ��������У�ȡW2(s)=0��
��ȷ����Ȩ������Ӧ��Matlab³�����ƹ��������ɵõ�ϵͳ������Ϊ��

�ջ�ϵͳ�������ջ����ݺ����� ������ͼ4��ʾ���ɼ�������1ʱ���ջ�ϵͳ�ȶ���ϵͳ�������������Ҫ��
������ͼ4��ʾ���ɼ�������1ʱ���ջ�ϵͳ�ȶ���ϵͳ�������������Ҫ��
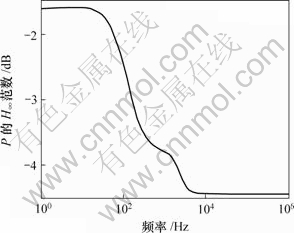
ͼ4 ������ݺ���P��H����������
Fig.4 H�� norm curve for augmented system P
����ɢ������Ϊ��
 ��������(17)
��������(17)
�������������������ϵ�ò�ַ��̱�ʾ���������ֿ��Ʒ���Ϊ��
 ��(18)
��(18)
ʽ�У�
k0=0.001 6 T2+8.106 6 T+0.001 6��
k1=19.579 T2-54.93 T+38.512��
k2=39.158 T2-77.024��
k3=19.579 T2+54.93 T+38.512��
k4=0.001 6 T2-8.106 6 T+0.001 6��
k5=0.003 2 T2-0.002 32��
���У�E(k)��kʱ�̿�������ƫ�����룻u(k)Ϊkʱ�̿������������
ʵ���в�������T�趨Ϊ1 ms������ʽ(18)����DSP����1 ms��ʱ�жϷ�ʽ�����Ȧ���������ֿ��Ƴ���D/Aת�������й��ʷŴ����������Ȧ��ʹ�����ܵ������������������ֶ�̬ƽ�⡣
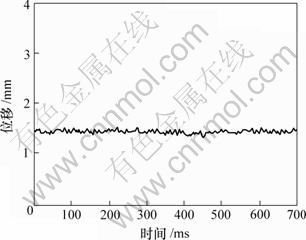
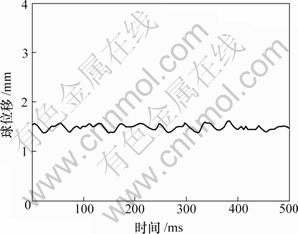
ͼ5��ʾΪӦ��H���������õ���ʵ�����������㷨��ɢ����������TI��˾��TMS320LF2407 DSPϵͳ���ʵ�֡���ͼ�ɼ���ϵͳ������������ÿ���ϵͳ���нϸߵ�³�����ܡ�
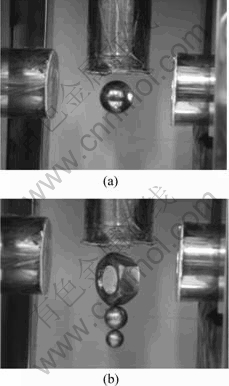
(a) ����С���ȶ�����ʱ�Ĺ��������(b) �������Ϊ������ĸ��ʹ���������������仯ʱ���ȶ��������
ͼ5 H������ʱ�Ÿ���ϵͳ��ʵ��ʵ��
Fig.5 Experimental results of maglev system with H�� controller
ͼ6��ʾΪӦ��H���������õ���ϵͳ�ȶ�����ʱλ�ô�������������Σ�ͼ7��ʾΪ���ڲ���PID���Ƶõ�����̬��������Կ�����Ӧ��H������ʱϵͳ����Ʋ���С�������̬λ�����Ϊ0.10 mm���Ȳ���PID����ʱ�����С0.25 mm��
ͼ6 H������ʱ����̬λ���������
Fig.6 Stable output of ball displacement with H�� controller
ͼ7 PID����ʱ���������̬λ���������
Fig.7 Stable output of levitated ball with PID controller
ͼ8��ʾΪ���������������仯ʱϵͳ�Ľ�Ծ��Ӧ���ɼ�������������һ����Χ�ڱ仯ʱ��ϵͳ���Ժܿ쵽��ƽ��״̬��������H����������ģ���㶯���к�ǿ��������������һ���棬H��������Ҳ���Զ�����Ƶ�����ܺõ��������ã���ͻ�Ӹ���ʱ��ϵͳ�����ں̵ܶ�ʱ���ڻָ��ȶ���ͼ9��ʾΪͻ��������ʱ��λ�ô�����������ɼ���ϵͳ�������Ŵ��ڵ������ͬ�����п��ٵ��ȶ��ԡ�
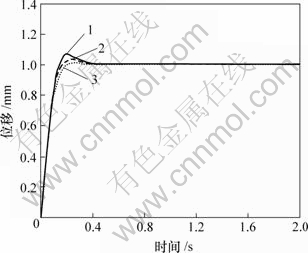
m/g: 1��40; 2��50; 3��60
ͼ8 ���������仯ʱ����Ľ�Ծ��Ӧ
Fig.8 Step responses with changed ball mass
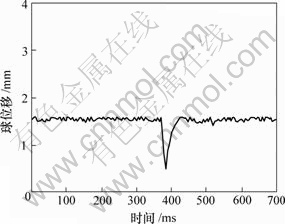
ͼ9 ��Ӹ���ʱ�����˶���λ�Ʋ���
Fig.9 Disturbed output response of levitated ball
4���ᡡ��
a. ���������Ƶ�һ�ִ�����С��ʵ��װ�ã������˸�ϵͳ�Ķ���ѧģ�ͣ��������H��³�����������������˷����ʵ���о���
b. ��ԭ�����õ�PID���Ʒ�����ȣ�����³������������ƵĴ���������������и������Ӧ�ٶȡ����ߵĿ��ƾ��Ⱥ�ǿ��³���ȶ��ԣ��������̬λ�����С��0.10 mm���Ȳ���PID����ʱ�����С��0.25 mm������������40~60 g��Χ�ڶ�̬�仯ʱ��������0.3 s��Ѹ�ٻظ���ƽ��״̬��
c. ϵͳ���ܵ����ͻ���Ŷ�ʱ�ܹ�Ѹ�ٻظ���ƽ��λ�ã��ȶ�����ʱ��������������������١�
�ο����ף�
[1] Kim W J, Trumper D L. High-precision magnetic levitation stage for photolithography[J]. Precision Engineering, 1998, 22(2): 66-77.
[2] ������, ½�½�, ��Ⱥ��. ģ��PID�����ڴ�����ƽ̨�е�Ӧ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(4): 631-636.
XU Liang-qiong, LU Xin-jiang, LI Qun-ming. Application of fuzzy-PID control to electromagnetic suspension platform[J]. Journal of Central South University: Science and Technology, 2005, 36(4): 631-636.
[3] Lyons J P, Preston M A, Gurumorthy R, et al. Design and control of a fault-tolerant active magnetic bearing system for aircraft engines[C]//Proceedings of the 4th International Symposium on Magnetic Bearings. Zurich, 1994: 449-454.
[4] Lepetic M, Skrjanc I, Chiacchiarini H G, et al. Predictive functional control based on fuzzy model: magnetic suspension system case study[J]. Engineering Applications of Artificial Intelligence, 2003, 16: 425-430.
[5] Lin C S, Lay Y L, Chen P W, et al, The laser displacement measurement with feedback control in a magnetic levitation and suspension system[J]. Computer Methods in Applied Mechanics and Engineering, 2000, 90: 25-34.
[6] Stephen C, Paschall II. Design, fabrication, and control of a single actuator magnetic levitation system[D]. Texas: Department of Mechanical Engineering, Texas A&M University, 2002.
[7] �쟺��, ������. ���������ɶ�������������п������о���̽��[J]. Ӧ�ÿ�ѧѧ��, 2002, 20(1): 55-60.
ZHU Huang-qiu, XU Long-xiang. A study and discussion on a controller for radial four-degree freedom active magnetic bearing[J]. Journal of Applied Sciences, 2002, 20(1): 55-60.
[8] Hassan I M, Mohamed A M, Saleh A I. Variable structure control of a magnetic suspension system[C]//Proceedings of the 2001 IEEE International Conference on Control Applications. Mexico, 2001: 333-336.
[9] Gentili L, Marconi L. Robust nonlinear disturbance suppression of a magnetic levitation system[J]. Automatica, 2003, 39: 735-742.
[10] ����, ��ѧ��. H��³�������еļ�Ȩ��ѡ��[J]. �廪��ѧѧ��: ��Ȼ��ѧ��, 1997, 37(1): 27-30.
WU Xu-dong; XIE Xue-shu. Weighting function matrix selection in H�� robust control[J]. Journal of Tsinghua University: Natural Science, 1997, 37(1): 27-30.
[11] �� ��, ������. �ִ�³������[M]. ��ɳ: ���Ϲ�ҵ��ѧ������, 1998.
WU Ming, GUI Wei-hua. Modern robust control[M]. Changsha: Press of Central South University of Technology, 1998.
[12] ������, ������.��һ�ȷ��ʱ����������ϵͳ��ɢ³��H������[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2005, 36(5): 132-137.
GUI Wei-hua, LIU Bi-yu. Decentralized robust H�� control for a class of uncertain interconnected nonlinear systems with time delays[J]. Journal of Central South University: Natural Science, 2005, 36(5): 132-137.
[13] Yi J H, Park K H, Kim S H, et al. Robust force control for a magnetically levitated manipulator using flux density measurement[J]. Control Engineering Practice, 1996, 4(7): 957-965.
[14] Uchiyama Y, Mukai M, Fujita M. Robust acceleration control of electrodynamic shaker using �̨Csynthesis[C]//Proceedings of the 44th IEEE Conference on Decision and Control. Seville, 2005: 6170-6175.
�ո����ڣ�2007-01-11�������ڣ�2007-02-25��
����飺��Ⱥ��(1969-)���У�������Զ�ˣ������ڣ���ʿ�����»�����Ƽ����о�
ͨ�����ߣ���Ⱥ�����У���ʿ���绰��0731-8830291��E-mail: liqm@mail.csu.edu.cn

