纵-扭复合型超声马达共振频率调谐
易幼平,钟 掘
(中南大学 机电工程学院,湖南 长沙,410083)
摘要: 将传统的复合型超声马达改进成双定子对称结构,提出一种通过在定子上附加一个调整环实现纵、扭振动同频共振的新方法。根据线性压电理论建立定子振动分析理论模型,研究定子的纵向振动与扭转振动第一阶固有频率随调整环质量和位置的变化规律,优化双定子复合型超声马达的几何结构参数。研究结果表明:调整环的质量对定子纵向振动与扭转振动的固有频率的影响程度相同,但调整环在定子上的位置对纵向振动的固有频率的影响程度有较大差异。当改变调整环在定子上的位置,纵向振动一阶固有频率的变化很小,但扭转振动一阶固有频率变化较大;调整环处于定子端部时,可以实现定子纵向振动与扭转振动一阶固有频率的调谐。
关键词: 超声马达; 固有频率; 扭转振动; 纵向振动; 调谐
中图分类号:TM356 文献标识码:A 文章编号: 1672-7207(2005)04-0626-05
Coincidence of resonance frequencies for longitudinal and torsional composite type ultrasonic motor
YI You-ping, ZHONG Jue
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: The traditional hybrid ultrasonic motor was improved to be a symmetrical structure with two stators. By means of adding an adjusting ring to the stator, a new method of eigenfrequencies degeneration of longitudinal and torsional vibrations was proposed. According to the linear piezoelectric theory, a theoretical model was established to analyze the vibrations of the stator. The changing law of the first eigenfrequencies of longitudinal and torsional vibrations following the mass and position of the adjusting ring was investigated. Furthermore, the structural parameters of the motor were optimized with the theoretical model. The results show that the mass of the adjusting ring has an identical influence on the eigenfrequencies of longitudinal and torsional vibrations, but the position of the adjusting ring has a great different influence on these eigenfrequencies. On the condition of changing the position of the adjusting ring, the first eigenfrequency of longitudinal vibration changes little, while the first eigenfrequency of torsional vibration changes greatly. When the adjusting ring is at the end of the stator, the first eigenfrequencies of longitudinal and torsional vibrations are of degeneration.
Key words: ultrasonic motor; eigenfrequency; longitudinal vibration; torsional vibration; conincidence
-
S.Ueha等[1]早期提出的复合型超声马达由[CM(22] 1个定子与1个转子组成,马达的工作频率为定子扭转振动的谐振频率,纵向振子在非谐振点上工作。扭转振子产生的微位移在谐振状态下能得到有效放大,使马达获得较大的输出力矩。然而,为进一步提高马达的输出效率与输出力矩,纵向振子同样应当在谐振点上工作[1,2]。在同一弹性体中,由于纵向振动波的传播速率大于扭转振动波的传播速率,因此,纵、扭振动的固有频率也不同,如何实现马达中纵、扭振动的同频共振是研究复合型超声马达的难点与关键问题。
国内外学者对复合型超声马达的研究有10多年的历史[3-9],已有的研究工作主要采用质量匹配法和变截面法对纵、扭振动固有频率进行调谐[10-15]。现有的质量匹配法即在定子的端部附加一质量,附加质量与定子的连接部分为一凹槽,纵向振动波能通过凹槽传播到附加质量中,而扭转振动波在凹槽处被有效阻隔,同时假设纵向振动波在定子与转子内进行传播,扭转振动波只在定子内传播,利用这一特点实现纵、扭振动固有频率的简并。但此方法提出的假设条件与马达的间歇式工作状况存在差异,且需要的匹配质量较大,降低了马达的输出效率。变截面法是将定子设计为变截面指数杆,通过选择变截面指数杆的面积缩减系数,改变纵、扭振动波在定子内的传播速度,使马达中纵、扭振动实现同频共振。由于变截面法对指数杆的加工与马达的制作有很高要求,影响了它的推广应用。
为解决复合型超声马达纵、扭振动的同频共振问题,作者提出一种双定子对称结构复合型超声马达,定子中纵、扭振型为第一阶,转子由2个定子驱动,同时在定子上附加1个调整环。调整环的作用一方面用于马达的支撑,另一方面改变定子的力学边界,从而达到调节纵、扭振动固有频率的目的。通过建立定子振动分析理论模型,研究纵、扭振动一阶固有频率随调整环质量与位置的变化规律,通过优化复合型超声马达结构参数,实现纵、扭振动一阶固有频率的简并。
1 扭转振动物理模型与材料本构方程
由于双定子复合型超声马达为对称结构,扭转振动分析物理模型可只取1个定子作为分析对象。与纵向振动分析物理模型不同[16],扭转振动分析物理模型的边界可视为两端自由(见图1),φi为局部坐标zi方向的角位移。
组成复合型马达定子的材料有3种:纵向振动型压电陶瓷(PZT);厚度切变振动型PZT;弹性体Cu。在建立定子运动微分方程时将应用此3种材料的本构方程。
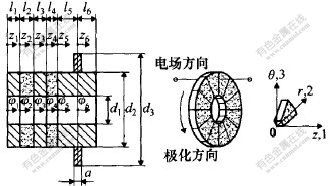
图 1 扭转振动分析物理模型
Fig. 1 Physical model for torsional vibration analysis
厚度切变振动型PZT的极化方向与电场方向垂直,电场方向仍为马达的轴向方向。由线性压电理论可知,以应变S和电场强度E为自变量的扭转振动型PZT的本构方程为:

其中:Ti为应力分量;Si为应变分量;Di为电位移分量;cEij为恒定电场下的弹性常数;eij为压电应力常数;εSij为恒定应变下的介电常数。
在分析扭转振动时,纵向振动型PZT材料的弹性常数cE44应计入扭转振动的本构方程,即:

其中:G2为纵向振动型PZT材料的剪切模量。
铜的材料本构方程为:

其中:GM为铜的剪切模量;v为泊松比。
2 扭转振动分析理论模型
2.1 扭转振动微分方程的通解形式
根据线性压电理论,扭转振动分析不存在横向效应,只需考虑一个坐标方向上的应力与应变。由马达横截面的力矩平衡方程可得到扭转振动的微分方程。
在厚度切变型PZT的材料区域,有:

在其他的材料区域,有:

其中:i=1,2,3,5,6。与纵向振动分析过程相似[16],谐波激励下的振动位移为:

将式(7)分别代入方程(5)和(6),扭转振动方程转化为:
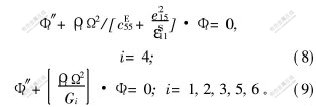
方程(8)和(9)可进一步简化为:

其中:
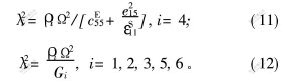
方程(10)的通解形式为:

积分常数C1i和C2i可根据马达的边界与连续性条件确定。
2.2 边界条件
根据扭转振动分析物理模型,定子两端为自由的边界条件下,即:

根据位移连续性条件,在截面z1=l1,z2=l2,z3=l3;z4=l4和z5=l5处,位移满足下列方程:

在截面z5=l5处,由于增加了调整环,附加的转动惯量将使该处截面的边界条件发生变化,其受力情况如图2所示。
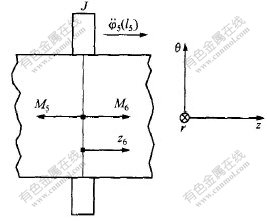
图 2 扭转振动分析时截面的动力边界
Fig. 2 Dynamical boundary on cross section of z5=l5
由牛顿定律可知,在截面z5=l5,力矩存在下列关系:

由于环只在铜的区域对固有频率进行调整,因此,方程(17)中的力矩有以下形式:

将式(18)代入方程(17),得调整环所在截面上的边界条件为:

其中:Ip为极惯性矩;J为调整环的转动惯量,且
1-2区域横截面上应力连续条件为:

2-3区域横截面上应力连续条件为:

3-4区域横截面上应力连续条件为:
4-5区域横截面上应力连续条件为:
方程(13)有12个积分常数,可通过12个边界条件即方程(14),(15),(16)(共5个),(19),(22),(23),(24)和(25)求解。
3 纵、扭振动固有频率简并分析
根据上述扭转振动微分方程通解,代入连续性条件与动力边界条件可对微分方程组求解。扭转振动微分方程组的表达形式为:

式中:A为系数矩阵;C为积分常数矩阵,C=(C11,C12,C21,C22,…,C61,C62);r为外力矩阵。
方程(26)具有非零解的必要条件为:

方程(27)为扭、振频率方程,是一个12阶的矩阵方程,通过该方程可以对双定子复合型马达进行振动分析与结构参数优化。将定子的材料参数代入频率方程,利用Maple软件求解该矩阵方程。
为了考察调整环对纵、扭固有频率的影响,利用定子振动分析理论模型分别在无调整环与有调整环的情形下计算纵、扭振动一阶固有频率,计算结果如图3和图4所示。无调整环时纵、扭振动一阶固有频率相差约5 kHz,当在定子上增加1个调整环时,纵、扭振动一阶固有频率相差只有0.2 kHz。由此可知,调整环对扭振固有频率有较大影响。
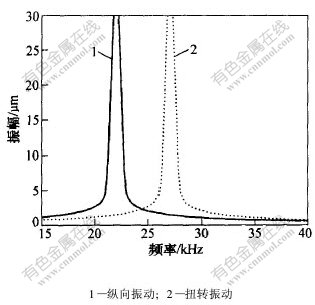
图 3 无调整环时纵、扭振动一阶固有频率
Fig. 3 The first order eigenfrequencies of longitudinal and torsional vibrations
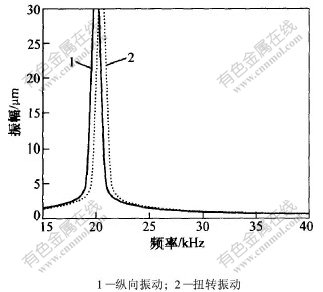
图 4 有调整环时纵、扭振动一阶固有频率
Fig. 4 The first order eigenfrequencies of longitudinal and torsional vibrations for stator with adjusting ring
为了考察调整环质量与位置对固有频率的影响,研究了2种情况下(即固定调整环位置l6=12 mm,改变调整环质量;固定调整环质量m=0.256 kg,改变调整环位置)纵、扭振动一阶固有频率的变化规律,结果分别如图5和图6所示。
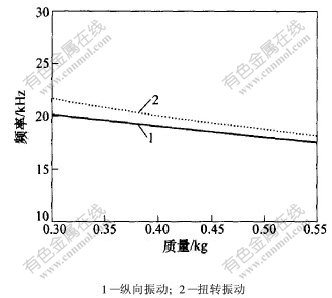
图 5 调整环质量对纵、扭振动一阶固有频率的影响
Fig. 5 Effect of mass mass of adjusting ring on the first order eigenfrequencies of longitudinal and torsional vibrations
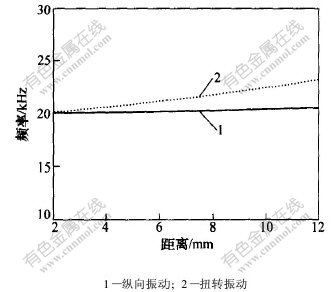
图 6 调整环位置对纵、扭振动一阶固有频率的影响
Fig. 6 Effect of position of adjusting ring on the first order eigenfrequencies of longitudinal and torsional vibrations
由图5可知:当调整环的质量逐渐增加时,定子的一阶纵向振动固有频率与一阶扭转振动固有频率均减小。这是因为质量增加,导致固有频率下降。由此可见,只通过改变调整环的质量无法实现纵、扭振动固有频率的简并。由图6可知:当改变调整环在定子上的相对位置时,定子纵向振动一阶固有频率变化较小,但定子扭转振动的一阶固有频率变化较大,利用这一重要特性,通过优化马达的几何结构参数可实现定子的纵、扭振动一阶固有频率简并。图6中,当马达几何结构参数分别为:l1=4.5 mm, l2= 4.0 mm, l3=5.0 mm, l4=4.0 mm, l5=19.5 mm, l6=4.0 mm, d1=15.0 mm, d2=40.0 mm, d3=60.0 mm, a=4.0 mm时,纵、扭振动具有相同的谐振点。
4 结 论
a. 通过将传统的复合型超声马达设计为双转子对称结构,提出了一种利用马达的对称性以及在定子上增加调整环实现纵、扭振动固有频率简并的新方法。
b. 建立了定子振动分析理论模型,运用该模型分别计算了在无调整环与有调整环2种情形下的纵、扭振动固有频率。分析结果表明,调整环对扭振固有频率有较大影响。
c. 调整环的质量对定子纵、扭振动固有频率的影响程度相同,但调整环在定子上的位置对纵、扭振动固有频率的影响程度差异较大。当改变调整环在定子上的位置时,纵向振动一阶固有频率变化较小,而扭转振动一阶固有频率变化较大;调整环处于定子端部时,可实现定子纵、扭振动一阶固有频率的简并。
d. 通过对定子纵、扭振动固有频率的简并分析,获得了在纵、扭振动谐振点上马达的几何结构参数。
参考文献:
[1]Ueha S, Tomikawa Y. Ultrasonic motors: theory and applications[M]. Oxford: Clarendon Press, 1993.
[2]Kurosawa M, Ueha S. Hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 1991, 38(3): 89-92.
[3]Nakamura K, Kurosawa M, Ueha S. Characteristics of a hybrid transducer-type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1991, 38(3): 188-193.
[4]Nakamura K, Kurosawa M, Ueha S. Design of a hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1993, 40(4): 395-401.
[5]刘锦波, 綦学尧, 陈永校. 大力矩复合型超声波电机的数学模型与特性的仿真计算[J]. 声学学报, 2000,25(6): 547-553.
LIU Jin-bo, QI Xue-yao, CHEN Yong-xiao. Mathematical model of megatorque-hybrid-type ultrasonic motor and its characteristics’ simulation[J]. Acta Acustica, 2000, 25(6): 547-553.
[6]Aoyagi M, Tsuchiya S, Murasawa Y. Trial production of an ultrasonic motor using longitudinal and torsional vibrations of a rod vibrator driven by piezo-ceramic plates inserted in its axial direction[J]. Jpn J Appl Phys, 1997, B36(9): 6106-6109.
[7]Satonobu J, Torii N, Nakamura K, et al. Construction of megatorque hybrid transducer type ultrasonic motor[J]. Jpn J Appl Phys, 1996, B35(9): 5038-5041.
[8]Wallaschek J. Piezoelectric ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures, 1995, 6(1): 71-83.
[9]Aoyagi M, Tomikawa Y. Improvement on pertormance of congitudinal and torsional vibrator combination-type ultrasonic notor[J]. Jap J Appl Phys, 1999, B38(5): 3342-3346.
[10]LIN Shu-yu. Study on the sandwiched piezoelectric ultrasonic torsional transducer[J]. Ultrasonics, 1994, 32(6): 461-464.
[11]林书玉. 纵-扭复合模式夹心式功率超声压电换能器的研究[J]. 声学学报, 1997, 22(4): 289-296.
LIN Shu-yu. Study on the sandwiched longitudinal-torsional ultrasonic transducer[J]. Acta Acustica, 1997, 22(4): 289-296.
[12]周铁英, 张立群, 薛毅,等. 扭纵超声马达振动系统共振频率简并研究[J]. 压电与声光, 1999, 21(2):150-160.
ZHOU Tie-ying, ZHANG Li-qun, XUE Yi, et al. Resonant frequencies into degeneration of hybrid longitudinal and torsional ultrasonic motor vibration system[J]. Piezoelectrics and Acoustooptics, 1999, 21(2): 150-160.
[13]LIN Shu-yu. Sandwiched piezoelectric ultrasonic transducers of longitudinal-torsional compound vibration modes[J]. IEEE Transactions on Ultrasonics, Ferroelectriics and Frequency Control, 1997, 44(6):189-1197.
[14]Tomikawa Y, Adachi K, Aoyagi M, et al. Some constructions and characteristics of rod type piezoelectric ultrasonic motors using longitudinal and torsional vibrations[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1992, 39(5): 600-607.
[15]Satonobu J, Friend J, Nakamura K, et al. Numerical analysis of the sysmenetric hybrid transducer ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Fervoelectrics, and Frequency Control, 2001, 48(6): 1625-1631.
[16]易幼平,钟掘.复合型超声马达纵向振动理论建模[J].中南大学学报(自然科学版),2005,36(3):452-457.
YI You-ping, ZHONG Jue. Theoretical modeling on longitudinal vibration of hybrid ultrasonic motor[J]. Journal of Central South University(Science and Technology), 2005, 36(3): 452-457.
收稿日期:2005 -03 -28
基金项目:国家自然科学基金重大资助项目(50390064); 国家“973”计划项目(2003CB716202)
作者简介:易幼平(1966-),男,湖南湘潭人,博士,副研究员,从事超声换能器与微电子封装等研究
论文联系人: 易幼平,男,博士;电话:0731-8836499(O);E-mail:yyp@mail.csu.edu.cn

