磁致伸缩扭转导波管道缺陷检测数值模拟和实验研究
朱龙翔,王悦民,孙丰瑞
(海军工程大学 动力工程学院,湖北 武汉,430033)
摘要:通过有限元方法对T(0,1)模态导波管道缺陷检测进行数值模拟,使用三维有限元单元建立缺陷管道模型,激励和接收T(0,1)模态导波,对管道模型中的多种缺陷进行检测。制作磁致伸缩扭转导波传感器,在实验中激励出T(0,1)模态导波对含有不同缺陷的管道进行检测。对T(0,1)模态导波反射系数与缺陷尺寸之间的关系进行数值模拟和实验研究。研究结果表明:当频率为29 kHz时,T(0,1)模态导波反射系数随缺陷轴向长度的增加先增大后减少,随着缺陷周向长度近似呈线性增加,随缺陷深度呈曲线增加。
关键词:T(0,1)模态导波;磁致伸缩传感器;缺陷检测;数值模拟;反射系数
中图分类号:TB551 文献标志码:A 文章编号:1672-7207(2014)09-3001-07
Numerical simulation and experimental study on detecting defects in pipes using magnetostrictive T(0,1) mode guided wave
ZHU Longxiang, WANG Yuemin, SUN Fengrui
(College of Power Engineering, Naval University of Engineering, Wuhan 430033, China)
Abstract: Detecting defects in pipes using T(0,1) mode guided wave was numerical simulated using finite element method. Aluminum pipes with different defects were modeled using three-dimensional finite elements, and tested by T(0,1) mode guided wave. The magnetostrictive torsional guided wave sensor was made in experiment. Using this sensor, T(0,1) mode torsional guided wave was excited successfully in aluminum pipe. Aluminum pipes with different defects were detected using T(0,1) mode torsional guided wave in experiment. The relation of the reflection coefficient of T(0,1) mode guided wave for defect in aluminum pipes and the dimensions of defect was studied by numerical simulation and experiment. The result indicates that at the frequency of 29 kHz, the reflection coefficient shows an increasing-decreasing tendency with the axial extent of defect, the reflection coefficient is a roughly linear function of the circumferential extent of defect, and increases monotonically with depth, with increasing slope.
Key words: T(0,1) mode guided wave; magnetostrictive sensor; defect detecting; numerical simulation; reflection coefficient
管道广泛应用于石油、化工、热电、供水等企业中,由于工作条件恶劣,管道容易产生锈蚀、穿孔、腐蚀、裂纹、破损等缺陷,如果不能及时将缺陷检测出来,可能会造成诸如高压管道爆裂、输送有毒介质的泄露等严重后果,带来巨大的经济损失甚至人员伤亡。在管道检测技术中,常规无损检测技术必须进行逐点扫描,检测速度慢、效率低。相比而言,导波无损检测技术具有传播距离远、检测速度快以及可实现整个管壁厚检测等优点,在管道无损检测方面得到普遍重视和大量研究。管道中的导波可以分为纵向模态L(0,m)、扭转模态T(0,m)和弯曲模态F(n,m)[1]。由于传播速度快、激发方式简单等特点,L(0,2)模态导波在管道的检测中应用比较普遍[2]。纵向模态导波对管道的周向裂纹比较敏感,但对管道上的纵向裂纹不够敏感。扭转模态的导波恰好弥补了纵向模态的这种缺点。其中,T(0,1)扭转模态导波具有非频散特点,且在传播过程中能量衰减较小,因此在管道检测中得到了越来越广泛的应用,成为管道导波检测研究中的热点。Demma和Ratassepp等[3-4]对管道中的T(0,1)模态导波传播特性及与缺陷的交互作用进行了研究。Kwun等研制了磁致伸缩传感器,激励出T(0,1)模态导波对管道进行了缺陷检测[5-6]。何存富等[7-8]研制了厚度剪切模式压电导波传感器,激励出T(0,1)模态导波对管道缺陷进行了检测。刘增华等[9-10]研究了带有黏弹性包覆层管道中超声导波扭转模态的频散及其衰减特性,并对其中的缺陷进行了检测。本文作者运用有限元方法对T(0,1)扭转模态导波管道缺陷检测进行数值模拟,制作磁致伸缩扭转导波传感器,在实验中激励T(0,1)扭转模态导波,对多种缺陷管道进行检测,以对数值模拟结果进行验证。最后结合数值模拟和实验结果,对扭转导波反射系数与缺陷尺寸之间的关系进行研究。
1 有限元模型
为了直观地研究导波的特性,有限元数值模拟的手段被引入来模拟导波传播过程。目前国内对管道中导波进行数值模拟多使用壳单元对管道进行建模[11-12],该方法建模的缺点是无法对管道的深度方向进行建模,在模拟管道缺陷时只可模拟贯穿缺陷,而无法模拟出不同深度的缺陷。相比而言,六面体单元可以很好地克服壳单元的这一缺点。
本文在ANSYS/LS-DYNA软件中使用8节点的SOLID164六面体单元对管道进行建模。管道模型长为4.01 m,外径为56 mm,壁厚为3 mm。管道的材质为铝,密度为2 700 kg/m3,弹性模量为65 GPa,泊松比为0.33。该管道模型的频散曲线如图1所示。选择导波激励频率为29 kHz。由于铝管受支撑的影响可以忽略,因此铝管设为自由边界条件。使用SOLID164单元对铝管模型进行扫掠式网格划分,单元沿轴向方向的长度设为4 mm左右,沿铝管圆周方向的单元数为32。由频散曲线可知,在该模型中T(0,1)导波群速度的理论值为3 008 m/s,在29 kHz频率下T(0,1)导波的波长为103.7 mm,本模型单元沿导波传播方向的长度小于导波波长的1/8,满足对管道精确建模的要求[13]。划分好的管道模型如图2所示。
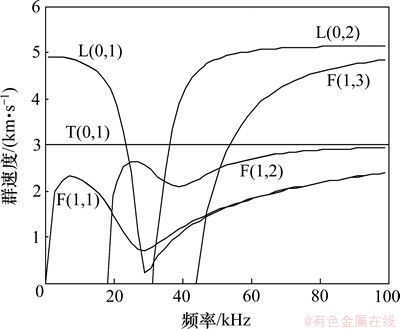
图1 铝管模型的频散曲线
Fig. 1 Dispersion curves of aluminum pipe model
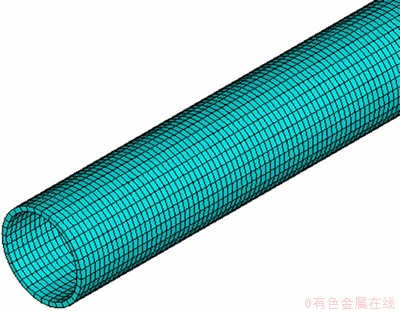
图2 铝管有限元模型
Fig. 2 Finite element model of aluminum pipe
为了模拟扭转模态导波的激励,给铝管端面各节点施加周向瞬时位移载荷,位移载荷为5个周期汉宁窗调制正弦波信号,中心频率为29 kHz,如图3所示。
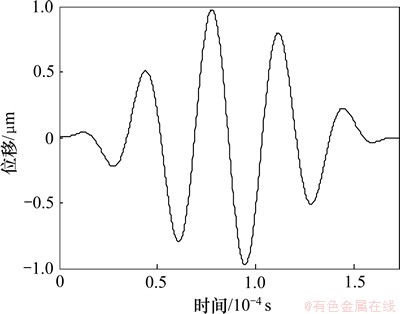
图3 输入信号
Fig. 3 Input signal
由于在ANSYS/LS-DYNA环境下无法对SOLID164单元节点直接施加周向方向的位移,因此对端面节点施加的位移分别沿X方向和Y方向,两方向的位移之和沿端面圆周的切线方向,如图4所示。图4中端面上的外节点和内节点上都分别施加了相应的位移,且两者之间的比值与端面外径和内径的比值相同。
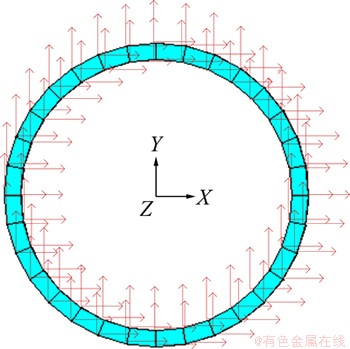
图4 管端施加的位移载荷
Fig. 4 Displacements prescribed in pipe end
设定该模型的计算时间为6 ms,在该时间内,T(0,1)导波可以完整地在铝管中传播2个来回,以方便对T(0,1)导波的传播特性进行观测。
对管端附近的节点位移进行监测,以此模拟对T(0,1)导波的接收。接收节点为距入射管端8 mm位置处的管道外径节点,接收到的位移方向为X方向和Y方向,将两方向位移进行矢量相加,其和矢量即为周向位移。对接收位置处节点的周向位移时程曲线进行分析时,将接收位置所有外节点的位移进行叠加平均,以消除模态转换产生的弯曲波的影响[11]。图5所示为在完整铝管模型中得到的信号,图中入射信号与第1次端面反射信号之间的时间距离为2.69 ms,由管道模型的长度为4.01 m,可以计算出导波的群速度为2 981.4 m/s,这与T(0,1)导波的群速度的理论计算值3 008 m/s相近。
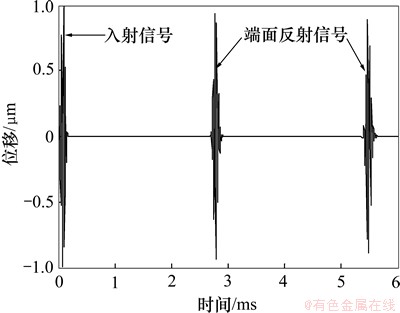
图5 完整铝管模型的模拟信号
Fig. 5 Signals for intact aluminum pipe model
2 实验设置
在使用T(0,1)模态扭转导波对管道无损检测中,压电式传感器应用较为广泛,而基于磁致伸缩效应的扭转导波传感器目前只有国外的Kwun[14]和Kim[15]进行了相应的研究。本文在前人的研究基础上,对磁致伸缩扭转导波传感器进行了制作。如图6所示,将多个铁钴条带与管道轴向方向成45°角黏贴在被测管道外表面,条带在管道的圆周方向均匀配置,在其外部的环绕线圈中通以交变电流。由于条带的相对磁导率比被测管道要大得多,环绕线圈所产生的磁场方向大部分沿条带方向[15]。条带在线圈产生的交变磁场下由于磁致伸缩作用会沿其长度方向产生弹性形变,对被测管道施加相应的作用力,在管道中激发出导波;当导波在管道中传播到条带所在位置时,由于条带与管道之间的耦合作用,条带会受到相应的作用力,由逆磁致伸缩效应引起环绕线圈中的磁通量发生改变,进而对扭转导波进行接收。
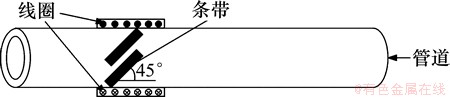
图6 磁致伸缩扭转导波传感器
Fig. 6 Magnetostrictive torsional guided wave transducer
图7所示为实验装置示意图[16]。实验所用管道为铝管,铝管几何尺寸与数值模拟中的模型相同,长度为4.01 m、外直径为56 mm、壁厚为3 mm。实验装置由扭转导波传感器、计算机、信号发生器、功率放大器等组成。扭转导波传感器分为激励和接收2部分。从信号发生器中产生激励信号,由功率放大器进行放大,作用于扭转导波激励传感器,在铝管中产生扭转导波。当扭转导波通过接收传感器所在区域时,由逆磁致伸缩效应将其转化为电信号输入到计算机进行存储和显示。实验中扭转导波激励传感器和接收传感器放置在被测管管端(图7中的A端),两者之间相距很近,这种配置使得激励的扭转导波相当于在管道中一端入射,同端激励,同端接收。磁化线圈用来提供偏置磁场,偏置磁场的存在可以提高传感器的灵敏度以及保证电信号与导波之间的线性关系。
实验中导波激励频率与数值模拟中相同,为29 kHz。图8所示为该激励频率下对无缺陷的完整铝管进行实验所得到的信号,图中初始信号为接收传感器线圈所接收到的初始电磁脉冲信号,后续信号皆为T(0,1)模态导波在铝管端面的反射信号,可见使用该传感器在管道中成功激励出了信噪比良好的T(0,1)导波,可以用于后续的缺陷检测。
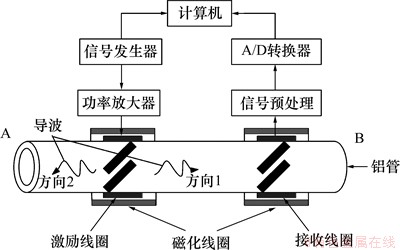
图7 实验设置示意图
Fig. 7 Schematic diagram of experimental setup
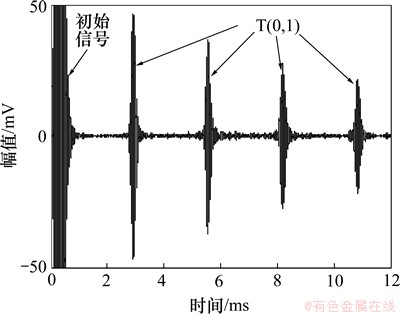
图8 完整铝管信号
Fig. 8 Signals for intact aluminum pipe
3 管道缺陷检测
为了模拟T(0,1)导波对不同缺陷的管道进行检测,在ANSYS/LS-DYNA软件中分别建立单一缺陷铝管模型、双缺陷铝管模型、三缺陷铝管模型。其中,单一缺陷铝管模型中缺陷中心位置距离导波入射管端2 m;双缺陷铝管模型中缺陷中心距入射端分别为1.55和2.56 m。三缺陷铝管模型中缺陷中心距入射端的距离分别为1.55,2.05和2.56 m。为了便于建模,模型中缺陷皆为8 mm×10 mm的方形通孔缺陷。
图9(a),图10(a)和图11(a)所示为对单一缺陷铝管模型、双缺陷铝管模型、三缺陷铝管模型模拟检测所得到的信号,图9(a)中两端面反射信号之间的时间间距为2.69 ms,由管道的长度4.01 m可求得管道中T(0,1)导波的速度为4.01×103×2/2.69=2 981.4 m/s。第1次端面反射信号的波峰位于2.784 ms,第2次缺陷反射信号的波峰位于4.128 ms,两者时间差为1.344 ms。因此,根据实验信号可计算出8 mm的通孔距传感器所处管端的距离为:l=1.344×2 981.4/2=2.004 m,与铝管模型中缺陷的实际位置相符合。
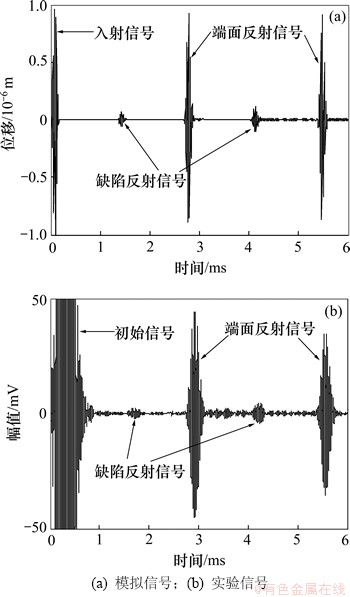
图9 单一缺陷铝管检测信号
Fig. 9 Signals for aluminum pipe with one defect
图10(a)所示为对双缺陷铝管模型模拟检测得到的信号。除了缺陷的回波信号之外,图10(a)中还存在相应的干扰信号,图中标记为波包1。该信号是由导波在管端及缺陷处的多次反射而产生的,其原理如图12所示:由A端激励的扭转导波向B端传播,经B端反射后向A端传播,经缺陷2反射向B端传播,再经B端反射向A端传播,在A端接收到的导波信号即为波包1信号。对于位于管道中心区域的缺陷1,其相应的干扰信号与其反射信号叠加到一起,因此无法在信号图中观察到。
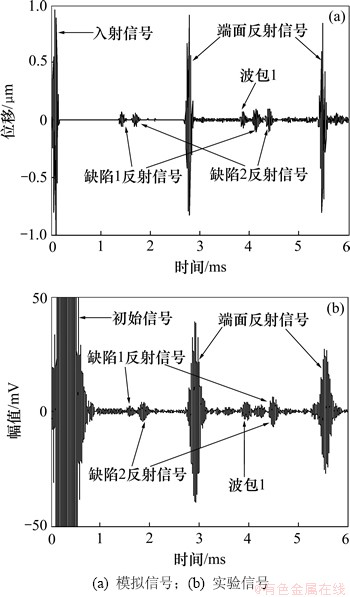
图10 双缺陷铝管检测信号
Fig. 10 Signals for aluminum pipe with two defects
图11(a)所示为对三缺陷铝管模型检测得到的信号,图11(a)中无法见到干扰信号(波包1),因为它们被相应位置处的缺陷反射信号所覆盖。
与数值模拟相对应,在实验中取3条与数值模拟模型相同尺寸规格的铝管,分别加工单一缺陷、双缺陷和三缺陷。各管中缺陷中心的位置与数值模拟中相同。其中,单一缺陷管道中的缺陷为直径8 mm的通孔,双缺陷管道中的缺陷为直径分别为8和10 mm的通孔,三缺陷管道中的缺陷为直径分别为8,8和10 mm的通孔。对3条铝管的检测实验结果如图9(b),图10(b)和图11(b)所示。根据图中的信号可以对缺陷进行准确定位,可见本文制作的传感器可以有效地对管道中的多个缺陷进行检测。由图9~11可知:数值模拟信号与实验信号非常吻合,证明了本文数值模拟方法的正确性。
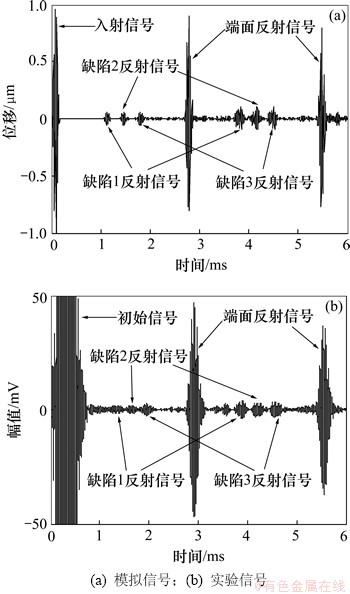
图11 三缺陷铝管检测信号
Fig. 11 Signals for aluminum pipe with three defects
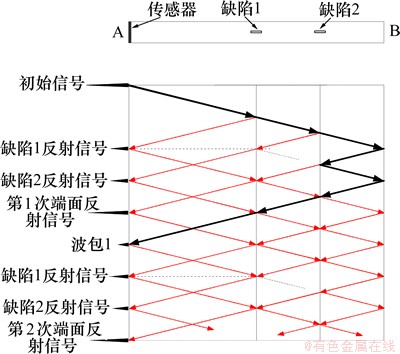
图12 导波传播示意图
Fig. 12 Sketch map of propagation of guided wave in pipe
4 T(0,1)导波反射系数研究
在使用T(0,1)导波对管道缺陷的检测中,缺陷的反射信号的幅值会随着缺陷的几何尺寸的改变而改变,因此有必要研究T(0,1)导波对缺陷的反射回波的幅值随缺陷尺寸的变化关系。为了定义缺陷反射回波信号幅值的变化程度,本文引入T(0,1)导波反射系数的概念,将反射系数定义为管道检测中第1次缺陷反射信号幅值与被测管道在缺陷中心位置处全截断时的第1次端面反射信号幅值的比值。
使用上文中建立的铝管模型,通过数值模拟对缺陷的反射系数进行分析。铝管中缺陷的方向可以分为轴向、周向和径向,因此,在保证其中2个方向的尺寸不变的情况下,可以得到T(0,1)导波反射系数随着另一方向上尺寸的变化曲线。为了便于数据处理,所有的缺陷的中心都位于管道同一位置。定义L为缺陷轴向长度与波长的比值,C为缺陷周向长度与铝管周长的比值,H为缺陷深度与铝管壁厚的比值,反射系数R随L,C和H的变化曲线如图13~15所示。图13对应周向长度为1/32铝管周长、轴向长度变化的贯穿缺陷,图14对应轴向长度为2 mm、周向长度变化的贯穿缺陷,图15对应轴向长度为2 mm、周向长度等于铝管周长、深度变化的缺陷。
实验中使用与数值模拟相同规格的管道进行检测,在3根管道上分别加工3种不同的缺陷:长度沿轴向方向、宽2 mm的贯穿裂纹;长度沿周向方向、轴向宽度为2 mm的贯穿裂纹;轴向宽度为2 mm的环形裂纹。在保证缺陷的中心位置不变的前提下,分别依次改变裂纹的轴向长度、周向长度、深度,对3根铝管进行测试,获取T(0,1)导波反射系数的变化曲线,其结果见于图13~15。
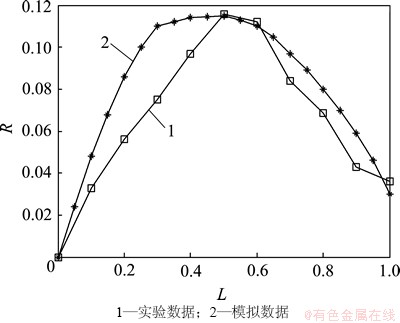
图13 反射系数R随缺陷轴向长度的变化
Fig. 13 Variations of reflection coefficient with defect axial extent
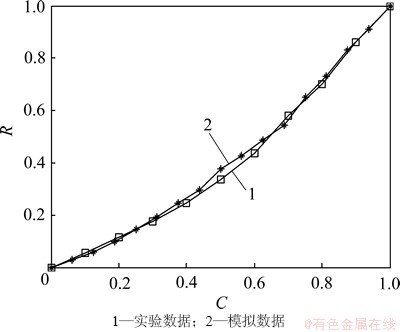
图14 反射系数R随缺陷周向长度的变化
Fig. 14 Variations of reflection coefficient with defect circumferential extent
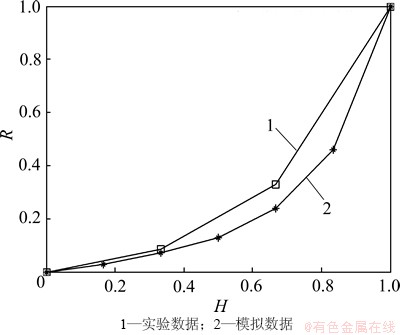
图15 反射系数R随缺陷深度的变化
Fig. 15 Variations of reflection coefficient with defect depth
由图13~15可知:数值模拟得到的反射系数变化曲线与实验得到的变化曲线在总体上趋势相同,但仍存在一定的差异,这一方面是由于对管道建模过程中无法精确获取实际管道材料的参数,在管道中模拟的缺陷也并非与实验条件完全相同;另一方面,实验中传感器对T(0,1)导波的检测精度不够高,存在一系列误差,且当扭转导波的反射系数较小时,传感器的相对误差较大,当扭转导波的反射系数较大时,传感器的相对误差较小。因此,图13中两者的差异较大,而图14和15中两者则差异较小。综合数值模拟与实验结果可知,T(0,1)导波反射系数随缺陷轴向长度的增加先增大后减少;反射系数随着缺陷周向长度近似呈线性增加;反射系数随缺陷深度呈曲线增加,且缺陷的深度越大,反射系数的增加也越快。
5 结论
1) 在前人的研究基础上,制作了磁致伸缩扭转导波传感器,在铝管中激发出了T(0,1)模态扭转导波,对铝管中的缺陷进行了检测,实验结果证明,该传感器可以有效对铝管中的多个缺陷进行检测。
2) 在ANSYS/LS-DYNA环境下中使用SOLID164六面体单元对建立了铝管模型,对铝管缺陷检测进行了数值模拟,模拟结果与实验相吻合,表明了数值模拟的有效性。
3) 综合数值模拟与实验结果,对T(0,1)导波的反射系数与缺陷的尺寸之间的关系进行了分析。结果表明,当频率为29 kHz时,T(0,1)导波反射系数随缺陷轴向长度的增加先增大后减少,T(0,1)导波的反射系数随着缺陷周向长度近似呈线性增加;T(0,1)导波反射系数随缺陷深度呈曲线增加。由于本文中仅对频率为29 kHz的T(0,1)导波进行了研究,关于频率对T(0,1)导波缺陷检测的影响,将在后续的研究中进行深入探讨。
参考文献:
[1] Rose J L. Ultrasonic waves in solid Media[M]. Unite Kingdom, Cambridge: Cambridge University Press, 1999: 154-163.
[2] Lowe M J S, Alleyne D N, Cawley P. Defect detection in pipes using guided waves[J]. Ultrasonics, 1998, 36: 147-154.
[3] Demma A, Cawley P, Lowe M J S. The reflections of the fundamental torsional mode from cracks and notches in pipes[J]. J Acoust Soc Am, 2003, 114(2): 611-625.
[4] Ratassepp M, Fletcher S, Lowe M J S. Scattering of the fundamental torsional mode at an axial crack in a pipe[J]. J Acoust Soc Am, 2010, 127(2): 730-740.
[5] Kwun H, Kim S Y, Choi M S, et al. Torsional guided-wave attenuation in coal-tar-enamel-coated, buried piping[J]. NDT&E International, 2004, 37: 663-665.
[6] Kwun H, Kim S Y, Matsumoto H, et al. Detection of axial cracks in tube and pipe using torsional guided waves[J]. Review of Quantitative Nondestructive Evaluation, 2008, 27: 193-199.
[7] 何存富, 杨士明, 吴斌, 等. 管道中激励和接收扭转模态导波专用探头的研制与应用[J]. 无损检测, 2005, 27(12): 621-623.
HE Cunfu, YANG Shiming, WU Bin, et al. Development and application of the special transducers for exciting and receiving torsional mode guided waves in pipes[J]. Nondestructive Testing, 2005, 27(12): 621-623.
[8] LIU Zenghua, HE Cunfu, WU Bin, et al. Circumferential and longitudinal defect detection using T(0,1) mode excited by thickness shear mode piezoelectric elements[J]. Ultrasonics, 2006, 44: e1135-e1138.
[9] 刘增华, 吴斌, 何存富. 超声导波扭转模态在粘弹性包覆层管道中传播特性研究[J]. 应用基础与工程科学学报, 2005, 13(3): 291-299.
LIU Zenghua, WU Bin, HE Cunfu. Torsional mode of ultrasonic guided wave propagation characteristics in pipes with viscoelastic coatings[J]. Journal of Basic Science and Engineering, 2005, 13(3): 291-299.
[10] 刘增华, 吴斌, 王秀彦, 等. 扭转模态在带黏弹性包覆层管道中缺陷检测的实验研究[J]. 中国机械工程, 2009, 20(5): 564-567.
LIU Zenghua, WU Bin, WANG Xiuyan, et al. Experimental study on defect detection in pipes with viscoelastic coating using torsional modes[J]. China Mechanical Engineering, 2009, 20(5): 564-567.
[11] 程载斌, 王志华, 张立军, 等. 管道超声纵向导波裂纹检测数值模拟[J]. 应用力学学报, 2004, 12(21): 76-80.
CHENG Zaibin, WANG Zhihua, ZHANG Lijun, et al. Numerical simulation of crack detection in pipes using ultrasonic longitudinal guided-wave[J]. Chinese Journal of Applied Mechanics, 2004, 12(21): 76-80.
[12] 何存富, 李伟, 吴斌. 扭转模态导波检测管道纵向缺陷的数值模拟[J]. 北京工业大学学报, 2007, 33(10): 1009-1013.
HE Cunfu, LI Wei, WU Bin. Numerical simulation of longitudianl crack detection in pipes using ultrasonic guided wave T(0,1) mode[J]. Journal of Beijing University of Technology, 2007, 33(10): 1009-1013.
[13] Lowe M J S, Alleyne D N, Cawley P. The mode conversion of a guided wave by a part-circumferential notch in a pipe[J]. Journal of Applied Mechanics, 1998, 65: 649-656.
[14] Kwun H. Method and apparatus generation and detecting torsional wave inspection of pipes or tubes: US 6429650 B1[P]. 2002-08-06.
[15] Kim Y Y, Park C, Cho S H, et al, Torsional wave experiments with a new magnetostrictive transducer configuration[J]. Journal of the Acoustical Society of America, 2005, 117(4): 3459-3468.
[16] 王悦民, 康宜华, 武新军. 基于磁致伸缩效应的钢管缺陷检测实验研究[J]. 振动测试与诊断, 2004, 24(3): 210-213.
WANG Yuemin, KANG Yihua, WU Xinjun. A technique of nondestructive inspection of steel pipes based on magnetostrictive effect[J]. Journal of Vibration, Measurement & Diagnosis, 2004, 24(3): 210-213.
(编辑 陈爱华)
收稿日期:2013-11-19;修回日期:2014-03-06
基金项目:中国博士后科学基金资助项目(20110491881)
通信作者:朱龙翔(1989-),男,江西上饶人,博士研究生,从事超声导波无损检测研究;电话:15172431196;E-mail: jdyzzlx@126.com

