����DFA����ʽAgentģ�͵������ʵ��
¬ޱޱ�������ˣ���־ǿ���°���
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ����Ի������Ŷ�Э���������ٶ�̬Ŀ�����Ҫ�����1�ֻ�������״̬�Զ���(DFA)�ĸ���ʽAgentģ�͡�ͨ���������״̬�Զ�������Ϊ״̬ģ�ͣ��Ը���ʽAgentģ�ͽ��иĽ����ڹ̶�·�ߵĶ�̬Ŀ�����ʵ���У��ԸĽ�ǰ���Agentģ��ʵ��ʵ�����ݽ��бȽϣ�������ģ��Ӧ���ڻ�������Ķ�����˶�Ŀ�����ʵ���С�����������Ľ����Agentģ��ͨ������״̬�Զ����е�״̬��������Ŀ��������ٵĽǶ������Agent�������ܣ��������ĽǶȣ������Ⱥ���Ŷӵ�Э�����ܣ������ģ��ͨ����Ϊ״̬ģ�ͽ����������ߵ��뻷����Ϣ��������Ч�ķ��룬�Ӷ����нϺõĿ���ֲ�Ժ���չ�ԣ��Ľ����Agentģ����ƫ������ֵ�������������Ϊ�Ľ�ǰ��һ�룬Ϊʵʱ��Ŀ��Э�����������ṩ����Ч;����
�ؼ��ʣ�����ʽAgentģ�ͣ�����״̬�Զ�������̬��Ŀ�����
��ͼ����ţ�TP301 ���ױ�־�룺A ���±�ţ�1672-7207(2010)02-0600-09
Design and implementation of complex Agent model using DFA
LU Wei-wei, CAI Zi-xing, WEN Zhi-qiang, CHEN Ai-bin
(School of Information Science & Engineering, Central South University, Changsha 410083, China)
Abstract: A deterministic finite automaton (DFA) based complex agent was proposed to assist cooperative object detection and tracking of robots team. This agent was improved with the behavior model which calls different modules depending on the state in DFA. To evaluate the available evidence on the efficacy and feasibility of the agent, the path data generated by the original algorithm was compared with the DFA based agent. Furthermore, it was applied to the region based multi-object tracking experiment. The results show that the DFA based agent not only improves the performance of an agent itself in dynamic cooperative object detection and tracking, but also improves the efficiency of group cooperation in the perspective of sociology. This agent is totally independent of action control unit, decision making and environment information, so that it has good portability and extendibility. It can be found that the expected value of error and the sample variant in the improved agent are reduced to be only half of the previous one��s. It is proved that the improved agent can provide an effective approach to cooperative object detecting and tracking.
Key words: complex Agent model; deterministic finite automation(DFA); multi-object tracking
���ƶ���Ķ�Ŀ��Э������һֱ�Ǽ�����Ӿ��м�����ս�Ե����⣬���Ż�����Ӳ����ʩ����������缼���Ŀ��ٷ�չ���������Ŷ���ɸ������������ҲԽ��Խǿ��Ŀǰ�����ǶԶ�Ŀ��Э�����ٵ��о������ڶ�Agentϵͳ����ϵ�ṹ��������䡢�˶�Э�������ơ����ع������˵ȷ���[1-2]��Ҫ�����δ֪������Э���������ٶ�̬��Ŀ�����⣬Ҫ���Agentϵͳ�͵���Agentģ�;����к������Ƚ�����ϵ�ṹ������֤�첽��ͨ����������ϵ�Agentģ�ͶԻ�������ʵʱ�۲죬������ֲ����⣬��ͨ��ͬ��������Agentϵͳ֮�����Ϣ����֤��Ϣ��ʵʱ�Ժ�ȷ�ԣ���������ȫ����Ϣ���о��ߡ����ƶ�������Эͬ����ϵ�ṹ��Ҫ�м���ʽ���ֲ�ʽ����ʽ�����������ڶ�Ŀ��Э����⼰���ٷ�����ǣ��Ķ�Agentϵͳ����ϵ�ṹ������Dz��÷ֲ�ʽ��ʽ�����е��أ��Ƚϵ��͵���GOFER[3]��MURDOCH[4]��KAMARA��ALLIANCE��[5]��ALLIANCE��ϵ�ṹ��ʹ������ʵ�ֻ����������Эͬ�����١�Ukita��[6]ʹ��һ��Active Vision Agents (AVAs)�����㽻���ṹ���о������ڻ����¹̶�������ת������ͷ�����ٶ�̬��Ŀ����������Զ��ԣ���Agent ϵͳ�е���Ҫ��ɲ��ּ�Agentģ����Ҫ�����ڵ�Agent����������ϵ�ṹ�ϡ����磺BDI(Belief, Desire, Intention)�ṹ��ʵ������Agent[7-8]������ʽ�ṹ�ķ�ӦʽAgent��[9]���ڶ��ƶ���Ķ�Ŀ��Э�������У�����Ŀ���Agent���Ƕ�̬�ģ�ʵʱ�Ըߣ��Ҹ����������ȣ��������ЩAgentģ�ʹ���һ���ľ����ԣ��ڴ���Agent��Ҫ������Ϣ����������£����Dz���ͨ��˼ά״̬��ȡ������Ϣָ�����������Ҳ����뵱ǰ����AgentȺ�������Ϣ�������Ŷ�Э�����Ӷ����ܼ������ȷ�Ը��ߵĽ��[10-11]��������ͼ��ʵ�������е���Ҫ���Լ��������ϲ����ܹ��Ϊ�����Ը������ˣ��ھ���Ӧ��ʱ��Ӧ���ʵ����������BDI��ܵIJ������������������иĽ�[12-13]��Ϊ�˽Ϻõؽ�����ƶ���Ķ�Ŀ��Э����������Ϣ�;��ߵ�ͬ�����첽���⣬���������Դ�BDI����ģ�ͷ�չ�����ĸ���ʽAgentģ��Ϊԭ�ͣ������1����������״̬�Զ�����Agentģ�ͣ��������ڼ���ʽ���ֲ�ʽ����ʽ�Ķ�Agent��Ŀ��Э������ϵͳ��
1 ��������״̬�Զ�����Agentģ�ͽṹ���
1.1 ����ʽAgent
����ʽAgent����BDIΪ����ģ����Agent����϶�����Զ����Ͳ���ִ�е�������̬����ṹ������֪�����������䡢��ģ���滮��ͨ�ź;��ߵ�ģ�飬�Ľ�ǰ��ĸ���ʽAgentģ�ͽṹ��ͼ1��ʾ��Agentͨ����֪ģ������ӳ��ʵ���磬���Ի�����Ϣ���г������͵���ͬ�Ĵ���ģ�顣����֪����������Σ���Ϣ�ͱ����뷴��ģ�飬�������������Ѷ��������͵��ж�ģ�飬������Ӧ�Ķ���[14]����1��Agent�������������������Agent����֮����û�в���ģ�����ͨ��������������̬���ı价�������ڴ�����Ҫ�����������£�����ϣ��Agent�֮��ͨ��ij����̬���ֳ������������ԺͿɿ���[15-16]����BDI����֧�ֵ�Agentģ��ƫ���ڸ���˼ά״̬��ָ���Ķ����뻷����Ϣ�Ļ��[17]����ˣ�����һ���ķ���ʹAgentģ�������ṩ1�����������������Ͷ���Ľ�����Ϣ���������ڴ�������ķֽ�;ֲ�������Ż�����Ҫ�����塣
1.2 �������״̬�Զ���(DFA)�Ը���ʽAgent�� �Ľ�
����״̬�Զ����Ǽ��������м���ģ�͵�һ�֣������Զ�ʶ����϶�����κ�һ�����ԣ���ʾΪ �����У�Q��1�����������ÿ��Ԫ�ؾ���ʾ��ǰϵͳ��1��״̬����Щ״̬�ڽ��յ��ɽ��ܵ�������Ŧ�ʱ�����ᰴ��ת�ƺ����Ĵ�һ��״̬ȷ��ת�Ƶ���һ�����״̬��������ΪF ��̬ʱ����ʾ���Խ�������[18]�����Ķ�Agentģ�͵������Ի���1���ڰ�ģ��[19]�ķ�������Ϊ�ϲ��أ��ɽ���Agent������Ϣ�������ƵĿͻ���/������ģʽ����ʽ��Agentϵͳ���Ľ���ĸ���ʽAgentģ����Ҫ�������²��֣���DFA��ά�ֵ���Ϊ״̬ģ�͡���ģ���֡���������������ɡ�ģ��⡢ͨ��ģ��Ͷ���ִ�������֪�������У�������;��������������Ϊ���߲��ʵ��ʵ�壬�����˶�Agent����Ը������ͼ��ά����
�����У�Q��1�����������ÿ��Ԫ�ؾ���ʾ��ǰϵͳ��1��״̬����Щ״̬�ڽ��յ��ɽ��ܵ�������Ŧ�ʱ�����ᰴ��ת�ƺ����Ĵ�һ��״̬ȷ��ת�Ƶ���һ�����״̬��������ΪF ��̬ʱ����ʾ���Խ�������[18]�����Ķ�Agentģ�͵������Ի���1���ڰ�ģ��[19]�ķ�������Ϊ�ϲ��أ��ɽ���Agent������Ϣ�������ƵĿͻ���/������ģʽ����ʽ��Agentϵͳ���Ľ���ĸ���ʽAgentģ����Ҫ�������²��֣���DFA��ά�ֵ���Ϊ״̬ģ�͡���ģ���֡���������������ɡ�ģ��⡢ͨ��ģ��Ͷ���ִ�������֪�������У�������;��������������Ϊ���߲��ʵ��ʵ�壬�����˶�Agent����Ը������ͼ��ά����

(a) ��ͨ����ʽAgentģ�ͽṹ��
(b) ���DFA�ĸ���ʽAgentģ�ͽṹ
ͼ1 �Ľ�ǰ��ĸ���ʽAgentģ�ͽṹ
Fig.1 Structure of complex agent without and using DFA
��������״̬�Զ�����Agentģ�ͶԸ���ʽAgentģ�͵ĸĽ���Ҫ������2�����棺
(1) �����1��������״̬�Զ���Ϊ��������Ϊ״̬ģ�͡��ڸ�ģ���У���֪������绷����ȡ��Ϣ��ͨ����Ϊ״̬ģ�͵IJ�ͬ״̬������ѡ���Խ�ģ��״̬ת���������Զ���Ϊ����Agent���͵�������������ݻ�����Ϣ�����ľ��ߡ�ͨ����Ϊ״̬ģ�ͣ��ɽ�����˼ά״̬��ָ���Ķ����뻷����Ϣ�Ļ�Ͻ�������Ч�ķ��룬������Agentģ����ƵĿ���չ�ԡ�
(2) ͨ����Ϊ״̬�����֣���Agentģ�͵ı�����ʽ���г���ʹAgentģ��֮�������Ժ�Э���Եõ�����ߡ�����Ϊ״̬Ϊָ������ĽǶȶ�AgentȺ���������Ļ��֣�ֱ�۵����ֿ�ʵʱ�����ȵ�Agent���壬�ɷִؽ����Ŷ������Agent����ʹ��ڲ�ͬ���ȼ��������е�Agent����ȡ��������˺Ͳ�ͬ��AgentȺ�����Ŷ�Ϊ��λ�����н������Ŷ�����ѡ�������Ϊ���ģ�����Ӷ��ϸ����ȡ�������˺�����Agent�Ŷӵ���Ϣ�����»�ȡĿǰ���Ŷ�������Agent�������Ϣ������������ȡ���Ŷ���Ϣ�����ں����ؽ�����һ���������ʽ�����ṩ��Ч��Ϣ��ÿ��Agent�����������Ŷ�������Agent���������Ϣ��������������Լ��ڲ�������������ȡ����Ϣ��Agent����ͨ������ģ��Ի�ȡ�ĸ�����Ϣ���д��������ϣ���������ʷ��Ϣ������AgentЭ����������Ӧ���ߡ�
2 ��Ϊ״̬ģ�͵����
2.1 Agent����������
����״̬�Զ���ά�ֵ���Ϊ״̬ģ�Ͷ������¡�
����1 ȫ�Զ�״̬����Agent��Ϊ�����У���û������Agent�ͷ������˺ڰ�ģ�͵���Ϣ֧�ֵ�����£��ܹ����������Ŀ�귢�ֺ��ٵ�������������Ѱ����Agent�����״̬������Ϊȫ�Զ�״̬��
����2 ���Զ�״̬����Agent��Ϊ�����У���ָ��Э���������£�Agent�����ض�ָ�������Ѱָ��Ŀ�꣬����֪��Agent����ͨ�ţ�Э������������������������������������Ȩ��������Ϊ������Ϊ���Զ�״̬��
1������Ե�Ⱥ������ҪЭ�����ŶӾ���ʱ����ϣ����Agent��Ȩ���������ƺ����֡��ڰ��Զ�״̬�У��������ϲ���������������Agent����״̬����AgentȺ�壬Ȼ��Ⱥ���е�Agent�������Ⱥ����������Ȩ�ޣ�ͨ�����������Ⱥ����������Ա��ϵ��ȡ��ϸ��Ŀ����Ϣ��������Եصȴ�����Ѱ��ʧ��Ŀ�ꡣ��ȫ�Զ�״̬�µ�Agent���壬���������������У��������ߣ�Ҳ����������AgentȺ��Э�̾��ߣ�����ݷ������˺ڰ�ģ�͵���Ϣ���о��ߣ����Ҷ���������û��ǿ���ԣ���������������Ͳ�ȥ��һ��������Ѱ��ǿ���������
2.2 DFA���
����Agent������Ϊ���ֵĹ̶��ԣ�ȫ�Զ�״̬�Ͱ��Զ�״̬�µ�����״̬�Զ�����״̬����һ�µģ�2��״̬���Ը�����ʵ������������������ת��������ʽAgent��ά����Ϊ״̬ģ�͵�����״̬�Զ�������ͨ��̽��Ļ�����ϢI����Ҫ��ɵ�������ϢM����Ϊ��ָ����ϢH����N=f (I, M, H)Ϊѡ��ָ����ѡ��
Ϊ����1��ʵʱ��ǿ��������ǿ�Ķ�Agentϵͳ�б�֤ÿ��Agentģ��������Agent�ܹ�Э����������ɶ�̬��Ŀ��Э�������ٵ���������1������״̬�Զ���������Agent��������ʵ�����е���Ϊ״̬����ʾ����ѧģ��Ϊ������ϸ�������¡�
(1) 1��״̬������ϣ�
Q={Wait, Detect, Track, Lost, Busy}
���У�WaitΪ�ȴ�״̬��DetectΪ���״̬��TrackΪ����״̬��LostΪĿ�궪ʧ״̬��BusyΪæµ״̬������AgentЭ���������ʱ��Ϊ����Դ���ŷ��䣬Э���IJ���Agent������������Busy״̬�������ȼ���ߣ����ɱ��жϣ������յ�����������б��У�����ʱ����ɡ�Э����Agent���յ��������Է������˻�Э����AgentȺ��Ĺ����ߣ��������˻����ʵʱ�������������ζ�Agent�ֲ����и��š���AgentȺ��Ĺ�������Ե�ǰ�������Э����AgentȺ�壬ͨ����Agent���巢��ָ�֤��Դ�������Agent�������ָ���ᱣ�浱ǰ���жϵ�״̬��Ϣ������Busy״̬�������Wait״̬ΪAgent��״̬��������3��״̬������ʵ����Agent�����Ŀ�����Ч���١�
(2) �ɽ��ܵ����뼯�� ����ָ����������������ķ��ţ�����״̬�Զ������ݸü����еķ��Ž���״̬�ı仯����������а���7��������ķ��ţ����Ǵ�����ʵ������Ӧ�������¼��ķ�����
����ָ����������������ķ��ţ�����״̬�Զ������ݸü����еķ��Ž���״̬�ı仯����������а���7��������ķ��ţ����Ǵ�����ʵ������Ӧ�������¼��ķ�����
={connect, findobj, lostobj, unconnect,
work, finishwork, order}
���У�connect��unconnect��ʾAgent������Ƶ�豸���ӻ�Ͽ���findobj��lostobj��ʾAgent����������״̬�£�ͨ����ǰ��ȡ����Ƶͼ�����֪��Ϣ����Ұ�ɼ��ķ�Χ����Ѱ��1���˶�Ŀ����ڴ���������ҵ�1������ʷ��Ϣ�Ǻϵ�Ŀ�ꣻwork��finishwork��ʾAgent������ܷ�����ָ������������ָ����������е������յ�workָ��ʱ����Agent���嵱ǰ״̬�������Ϣ���б��棬��ȥ������Ӧ����ִ��finishworkָ��ʱ����������������л�ȡ�������ǰ��״̬��Ϣ���ָ�������ִ��֮ǰ��״̬��order��ʾAgent������ܷ�������ָ�ת�����µ�״̬�����ָ��������
(3) ��ʼ״̬q0={Wait}�ͽ���״̬F={Wait}��
(4) ת�ƺ�������Q������Q��һ��ӳ�䣬������״̬�Զ�����ʶ������״̬�Զ���ת�ƺ�����ͼ2��ʾ�����У�ʵ��Ϊ����״̬�Զ�������״̬��ͨ�õ�ת�ƺ�����������Ϊ���Զ�״̬������״̬�Զ������е�ת�ƺ�����������Ϊȫ�Զ�״̬������״̬�Զ������е�ת�ƺ�����
2.3 ��ģ����
���ڰ��Զ�״̬�µ�DFA�����н�ǿ�������ԣ�Ȩ�ޱ��������ƣ���ˣ���Ҫͨ��ȫ�Զ�״̬�µ�DFA���Խ�ģ���ֽ���˵������ģ���ֵĹ�����ͨ�������Ϣ�Ļ�ȡ��Agent��������״̬�Զ������ṩ��״̬��ģ����ڵĹ���ģ���ѡ�����۲��Ŀ��ģ�ͺ͵�ǰAgent�ij���ģ�͡�Ϊ�˱�֤������Agent�����Ŀ����ܹ�ʹ��������δ��Ŀ���Agent����ȷ����Ѱ��Ŀ�꣬Ŀ��ģ�͵�����Ӧ���п��ؽ��ԡ�������У�����Ŀ�������������2��������(��ɫ��Ϣ��������Ϣ)��1���ɱ���(������Ϣ)����ʾ������ͨ����������Ϣ��֤�˶�Ŀ���ؽ��Ŀɿ���[20]��HSVɫ�ʿռ�����ɫ������������������Ϣ��ѡȡ�ȿ��ڼ���м����ɹ��ߡ���Ӱ���ڵ�����ת�ȴ����ĸ��ţ��ֿ�����Ϣ�����Ѹ�ٵر�����������Ŀ�꣬��ˣ����ٲ��õ��㷨��Ҫͨ��������ɫ��Meanshift�㷨��ʵ�֡�Ϊ��ʵ�ֶԶ�̬Ŀ������٣��ڲ�ͬ��״̬�½����ò�ͬ�Ĺ���ģ�顣��������״̬�Զ����������Ĺ���ģ���Agent��������Ϊ�滮�����������ĸ��ǣ�״̬���е�Detect״̬��Track״̬��Lost״̬��3��״̬��ģ����÷�����ͼ3��ʾ��
2.3.1 Detect״̬
Detect״̬��3�����ȣ����У�1����Track״̬��1����Busy״̬��1����������ѭ����Detect״̬��Track״̬��ת����findobj��order 2�ַ�����Findobj����ͨ������ģ����еĻ�����֡���Ŀ���⣬��̬ѧȥ������Ŀ��ָ�ϲ�����ȡ��ģ����ɶ�Ŀ��IJ��ң�order������������˽���ͨ�ţ����ո���ָ��Ŀ���ָ������Ӧ������Detect״̬��Busy״̬��ת�������ڽ��յ��������˲�����ָ��order��ʵ�ֵ�ǿ��ת������Detect������״̬��ѭ����lostobj�Ǻ�Detect��Track״̬��findobj����Ӧ�Ļ�����Ϊ��
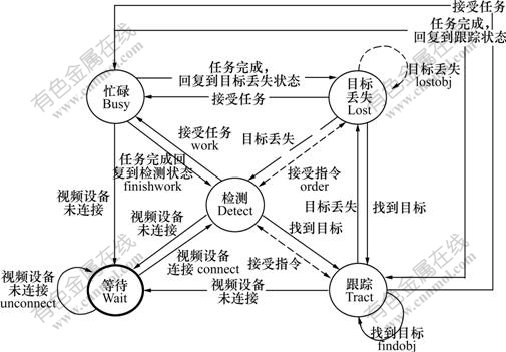
ͼ2 ���DFA�ĸ���ʽAgentģ��������״̬�Զ���ת�ƺ���ʾ��ͼ
Fig.2 Transfer functions in complex Agent using DFA

��ʵ��Ϊ�����뷵�ص����ݣ�ϸʵ��ΪDetect״̬���õ�ģ��˳��
������ΪTrack״̬���õ�ģ��˳������ΪLost״̬�µ���������
ͼ3 ��ģģ����÷���
Fig.3 Methods of combining modules through DFA
��ȫ�Զ�״̬�¼������˶�Ŀ�꣬�����Լ������ЧĿ����Ϣ������findobj�����������ȵ��ȵá����ٿ���������Ŀ����Agent����������Ϊ����ѡȡ����Ŀ�겢���ж���ת����Track״̬���и��٣�����Ŀ��ɽ��л������Ӿ����١���û�и��ٵ�Ŀ�꣬����lostobj���ص�Detect״̬������⡣
2.3.2 Track��Lost״̬
Track״̬�ij�����2��״̬ת����һ����findobj����һֱ��Ч�ظ����ŵ�ǰĿ�꣬��ά�ָ���״̬����һ����lostobj����ʧĿ��֮��ת��Lost״̬���������״̬��findobj������3�֣�����Detect״̬��findobj��Track״̬��ȣ�Lost״̬��findobj������ͬ��Detect״̬��findobj�ҵ���Ŀ����Ԥ��δ֪�ģ���Track״̬��Lost״̬��findobj���Ǹ���Detect״̬��ȡ�Ļ��߸��ݷ������˷��͵���֪Ŀ����Ϣ����������١�
2.3.3 �����
�ڹ��ߡ��������Եȸ��ֲ���Ԥ֪������Ӱ���£�Ŀ������ⶪʧ�Ǻ��п��ܳ��ֵġ���ˣ�Ϊ�˴����������⣬ΪAgent��������˼����Ԥ��ܡ������ڶ�Track��Lost״̬����ת���Ĺ��������� ���á�
������Agent������Track״̬��ͬʱ������֪��Ϣ�������н��б���Ĺ��̣����ɷ�Ϊ���ڼ���ͳ��ڼ��䡣���ڼ�����סAgent�����Ŀ����������Ķ����������ڼ�����ס�ڸ���Ŀ������������У����õ���Agent�����Ŀ���ƶ���·�����ڻ�ȡ��һ������Ϣ����ʹ��������϶�Agent�����Ŀ���ƶ���·������Ϣ���й��ɡ���Agent����Ŀͻ����ϣ������������ơ�ͼ�����ݴ�����ͨ�ŵȴ�������ֻ��Ҫ���ǶԲ������ݽ���ֱ���������ϡ��������˻����������ݽ��м��㡣
Ԥ���Ǹ�����ʷ��Ϣ���������Ŀ���¸�ʱ�̽����ֵ�λ�õĹ��̡�������Ŀ������С��ij����ֵʱ������ΪĿ�궪ʧ�������Lost״̬�����ڼ�������������Ķ���Ӱ������������������鹤�������ݶ��ڼ�����ɵ�1~2������������Ŀ�꣬��ʧ�ܣ���ͨ����ȡ���ڼ���Ķ���ʽ������ϳ���Ŀ��켣�ҵ�Ŀ��������ĽǶȣ�ת��Ԥ��ĽǶ������й۲⡣����һ��ʱ���ڶ����ҵ�Ŀ�꣬����ΪĿ��ȷʵ��ʧ��������Ϣ���������ˣ��������������״̬ת����
3 ʵ����
������2����ͬʵ�����������ģ�͵���Ч�ԡ�Ӳ��ʵ��ƽ̨Ϊ��AmigoBot������MORCS-2�����Ŷӣ�����˶��ٶ�750 mm/s���������ٶ�Ϊ677 MHz���ڴ�Ϊ512 Mb������ͷΪ��������ͷGWS-1320��130�����أ���������TL-WN321G��������ٶ�54 Mb/s������ʵ��ƽ̨Ϊ������ϵͳWindows XP����̻���ΪMicrosoft Visual Studio .NET 2003���������ΪC++���������˲��úڰ�ģ�ͣ�֧��������Ϊ�ල�ߵ�ң������ȫ����Э��2�ֹ���ģʽ���ͻ���ΪAmigoBotƽ̨����ƸĽ���Ľ��DFA�ĸ���ʽAgentģ�ͣ����绷��Ϊ���ڴصİ���·��ͨ�ŷ�ʽ��Ad-hoc���磬ͨ����ѭIEEE802.11b/g����ͨ�ű���ʵ�黷��Ϊ���ڣ�������Ȼ���ա�
3.1 �̶�·�ߵ�Ŀ�����ʵ��
��1�������ڣ�1��������Agent��ʹ�ý��DFA�ĸ���ʽAgent��ʹ�ò���DFA�ĸ���ʽAgentģ��2�������£�����1���̶�·�ߵ�Ŀ�꣬������ٶ�λ��������������·����ͼ4(a)��ʾ��
3.1.1 ����·�ߵ�ȷ������
������·����ʱ������ΪAgent�������˶������е��ٶȱ仯��˲ʱ��ɵģ�Agent�����й�������ά�������˶���ÿ��Agent��ת��ƫ�ƽǶ�Ϊ�ȡ���Ŀ���Agent��1��ֱ����ʱ������·��Ϊֱ�߶Σ���Ŀ���Agent������1��ֱ����ʱ�����ȡ�45?ʱ��Agent��·��ҲΪֱ�߶Σ����ȣ�45?ʱ��Agent��·��Ϊ��|90?/��|-1��ֱ����ɵ����߶Σ�������㷽�� ���£�
�� ʱ��
ʱ��
 (1)
(1)
�� ʱ��
ʱ��
 (2)
(2)
��ȡ����·�ߵ�ʾ��ͼ��ͼ4(b)��ʾ���ɼ�����Ŀ�굽��S1��ʱ��Agent����S0�㣬Ŀ��ı䷽���� �������ߣ���Agent����·��Ϊ
�������ߣ���Agent����·��Ϊ ����S0��S1֮�����Ϊs��Ŀ���˶��ٶ�Ϊv1��Agent�ٶ�Ϊv2 (��֪v2�Դ���v1)����Ŀ���S1����������b1��ʱ��Agent��S0����������a0�㡣����Ŀ���Ѿ�����Agent��Ұ���ٽ�㣬��ˣ�Agent��ת����Ϊ��λ��������������٣�����·��������a0��b1������С���Ŀ���b1���н���b2��ʱ��AgentҲ��a0���н���a1�㡣���S0��a0��ʱ��Ϊt0��a0��a1��ʱ��Ϊt1��an��S2��ʱ��Ϊtn+1��s���Ϊ��֪��Ҫ��֪Agent��·����������t0, t1, ��, tn+1�����У����ȡ�45?ʱ��ֻ��Ҫ����r=0���������ɵó�ֱ��·����
����S0��S1֮�����Ϊs��Ŀ���˶��ٶ�Ϊv1��Agent�ٶ�Ϊv2 (��֪v2�Դ���v1)����Ŀ���S1����������b1��ʱ��Agent��S0����������a0�㡣����Ŀ���Ѿ�����Agent��Ұ���ٽ�㣬��ˣ�Agent��ת����Ϊ��λ��������������٣�����·��������a0��b1������С���Ŀ���b1���н���b2��ʱ��AgentҲ��a0���н���a1�㡣���S0��a0��ʱ��Ϊt0��a0��a1��ʱ��Ϊt1��an��S2��ʱ��Ϊtn+1��s���Ϊ��֪��Ҫ��֪Agent��·����������t0, t1, ��, tn+1�����У����ȡ�45?ʱ��ֻ��Ҫ����r=0���������ɵó�ֱ��·����
��ʽ(1)��ʽ(2)�ɼ���t0, t1, ��, tn+1�����ɵõ�Agent���ߵ�����·�ߡ���ͼ4�ɵã���DFA��Agent���� ·�߱Ȳ���DFA��Agent���ߵ�·�߾��и���Ч����
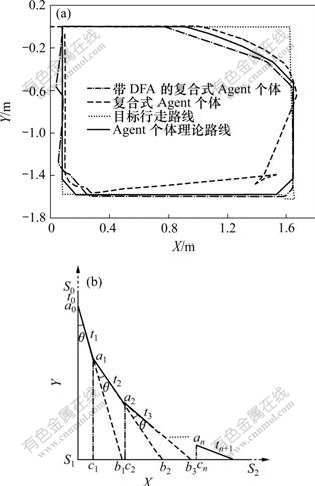
(a) Agent�������ߵ�ʵ��·��������·�ߣ�
(b) ����·�ߵļ��㷽��
ͼ4 ��DFAģ�͵�Agent����Ͳ���DFAģ�͵�Agent����Թ̶�·��Ŀ��ĸ���
Fig.4 Path data generated by agent using DFA and
without DFA
3.1.2 Ŀ�����ʵ�����Ƚ�
���DFA�ĸ���ʽAgent�����ʹ�ò���DFA�ĸ���ʽAgent�����ڸ���ͬһ���̶�·�ߵ�Ŀ��ʱ�������ǵĸ���ʵ��·����ʽ(1)��ʽ(2)�����Agent�����������·�߽��бȽϣ��ɼ������DFA�ĸ���ʽAgent�����н����Ե��������ơ�����Ҫԭ�����ڣ�ʹ�ò���DFA�ĸ���ʽAgent���彫ֱ�ӵ���ģ����е�ģ����н�ģ���Һͷ�������������Ϣ�в���״̬��Ϣ������ȡ�������Ϣ�����������������Ϣ�У�ֻ�ܴ��е�ǰ�Ƿ��ҵ�Ŀ�ꡢ�Ƿ��ڸ���Ŀ��ȱ�־λ��Ϣ�����Ŀ�궪ʧ��ͨ����������������������������Զ�������⡣���Ǽ��״̬�´��ص�Agent������Ϣ���Ͷ�ʧ״̬���ص�Agent������Ϣ�����ᱻ�������֣���ˣ���������ܽ��½�������Ч����
ѡ������ͬʱ����Agent����ʵ��·���ϵ�λ�� ������·���ϵ�λ��(x, y)֮���ƫ��
������·���ϵ�λ��(x, y)֮���ƫ�� ��Ϊ��������Agent�����Ŀ�����Ч�������ڸĽ�ǰ��ķ����ֱ����ȡ30��ʱ��㣬���ֱ����ʵ��·��������·��ƫ������ͼ5��ʾ����DFAģ�͵�Agent��������·������벻��DFAģ�͵�Agent��������·��ƫ���С����Ҫ��3��ֱ�Ǵ�ƫ��ϴ�1��ֱ�Ǵ���Ŀ����Agent����֮����һ�γ�ʼ���룬��ˣ�Agent����Ĺ���ϴ�ƫ��Ҳ�������Agent�����ٶ��Դ���Ŀ�꣬��ˣ��ڵ�1������֮��Agent�����Ѿ���Ŀ�걣����һ���ȶ��ĸ��پ��룬��2�������ƫ����Խ�С�������DZ�ֱ�߾������ƫ���ͨ��������ȡ��������ֵ���ɵ�ƫ���������Ϣ��������1��ʾ���ɼ�����DFAģ�͵�Agent��������·��ƫ������ֵԼΪ����DFAģ�͵�Agent��������·��ƫ������ֵ��һ�롣��ͨ����������������2��·�ߵ�����������С����֪��DFAģ�͵�Agent��������·��������������С��ԼΪ����DFAģ�͵�Agent��������·�����������һ�롣
��Ϊ��������Agent�����Ŀ�����Ч�������ڸĽ�ǰ��ķ����ֱ����ȡ30��ʱ��㣬���ֱ����ʵ��·��������·��ƫ������ͼ5��ʾ����DFAģ�͵�Agent��������·������벻��DFAģ�͵�Agent��������·��ƫ���С����Ҫ��3��ֱ�Ǵ�ƫ��ϴ�1��ֱ�Ǵ���Ŀ����Agent����֮����һ�γ�ʼ���룬��ˣ�Agent����Ĺ���ϴ�ƫ��Ҳ�������Agent�����ٶ��Դ���Ŀ�꣬��ˣ��ڵ�1������֮��Agent�����Ѿ���Ŀ�걣����һ���ȶ��ĸ��پ��룬��2�������ƫ����Խ�С�������DZ�ֱ�߾������ƫ���ͨ��������ȡ��������ֵ���ɵ�ƫ���������Ϣ��������1��ʾ���ɼ�����DFAģ�͵�Agent��������·��ƫ������ֵԼΪ����DFAģ�͵�Agent��������·��ƫ������ֵ��һ�롣��ͨ����������������2��·�ߵ�����������С����֪��DFAģ�͵�Agent��������·��������������С��ԼΪ����DFAģ�͵�Agent��������·�����������һ�롣
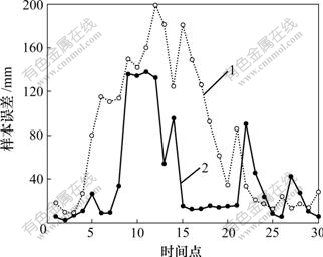
1������DFAģ�͵�Agent��������·�ߵ�ƫ�
2����DFAģ�͵�Agent��������·�ߵ�ƫ��
ͼ5 ʵ��λ��������λ�õ�ƫ��Ƚ�
Fig.5 Errors generated by agent using DFA and
without DFA
��1 ��ͬAgent��������·�ߵ�ƽ��ƫ������������
Table 1 Expected values of error and sample variant generated by agent using DFA and without DFA

3.2 ���������Ŀ�����ʵ��
���������Ŀ�����ʵ��[21]�Ƕ�Ŀ�궯̬���������о��о���ʹ�õ�һ��ʵ���ֶΣ���ͨ������ʵ����֤����ƵĽ��DFA�ĸ���ʽAgent����Ŀ����ԡ�����ʹ�ò���DFA�ĸ���ʽAgent����ĸ������ܽ�Ϊ��������Э������ʱ�ɵ����Խϲ��Эͬ�������·�߶�Ŀ�겢ʵʱ����Эͬ����ʱ�������������ˣ�����ͨ��ʹ�ö�����н��DFA�ĸ���ʽAgent����ģ�͵Ļ������ڸ�ʵ������ɶ�Ŀ����������ɴ���֤���DFA�ĸ���ʽAgentģ�͵Ŀ����Ժ�����Эͬ�ϵ���Խ�ԡ�����Ƶ�ʵ���У�2�������Ļ����˸�����۲�һ������������Ҫ��֤��ǰ���۲�������������ֵĶ�̬Ŀ����ܱ����٣�����¼�����Ϣ�����ٻ�������Ϊ����1������·�ߵ�Ŀ�����۲�����ʱ������ǰ���۲��Ŀ��û�б����������˸��٣��������и��٣�����ǰĿ�����л����˶�����٣�����ݻ����˵�ǰ���ڵĸ���״̬�������˸���۲������Ŀ����ָ��ʡ������˺۲��ľ�������ؼ���2��������֮��ľ����ɱ����ɱ��ϵ��߽���ø�Ŀ��ĸ���Ȩ�ޣ�������ʧ���ߣ����ص��Լ����������۲��������й۲⡣ʵ������ͼ6��ʾ��ʵ�鲽�����£�
(1) ʵ�鿪ʼʱ��������1�ͻ�����2�������У�������һ��������й۲⣬����·��Ŀ��A���������1�Ĺ۲�����
(2) ������1�ڹ۲�����۲Ŀ��A�ͻ�����2ͨ�ŵ�֪��δ�л����˸���Ŀ��A��������1���Ȩ��Ŀ��A���и��٣���ͼ6 (a)��ʾ��
(3) Ŀ��A���������2�Ĺ۲���������1�ͻ�����2ͨ��ȷ�����ǹ۲���ͬһ��Ŀ�꣬2�������˽��гɱ����㡣���ݾ����ɱ�����ļ��裬����ڻ�����2��������1���нϸߵ�ƣ�Ͷȣ�����������۲���Զ��������ľ����ɱ��Ȼ�����2�ĸߣ���ͼ6 (b)��ʾ��
(4) Ŀ��A����ǰ����������1����Ŀ��A�ĸ��٣����ص�����۲������۲⣬������2���Ŀ��A�ĸ���Ȩ�ޣ�������и��٣���ͼ6 (c)��ʾ��
(5) Ŀ��A����ǰ����������2��������Ŀ��A��Ŀ��B�����ڻ�����1�Ĺ۲���������1�۲Ŀ��B���������2ͨ�ź�ȷ��Ŀ��B��״̬����Ϣ�������Ȩ����Ŀ��B����ͼ6 (d)��ʾ��
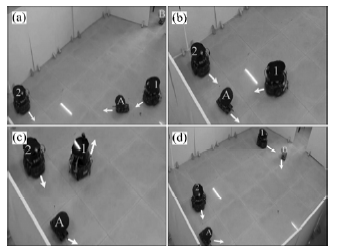
(a) ��Ŀ����٣�(b) �Ŷ�Э�̣�(c) ���ž�������ȣ�
(d) ��Ŀ��۲������
ͼ6 ���������Ŀ�����ʵ��(��ͷ��ʾ�����˺�Ŀ���˶��ķ���)
Fig.6 Region based multi-object tracking experiment (arrows indicate robots and objects moving directions)
4 ����
(1) �ڸ���ʽAgentģ�͵Ļ����ϣ���������״̬�Զ�����Ϊ��Ϊ״̬ģ�ͽ�����չ������Զ�� �����ŶӶ�Ŀ��Э�������Э�����ٵĻ��������� ��ơ�
(2) ��ʵ�ʻ�����ͨ���������˳��ظĽ�ǰ���Agentģ�ͽ��й̶�·��Ŀ��ĸ��٣���ģ�����ܽ��з�����֤���Ľ����ģ�������Ը���Ŀ����ٵ����ܣ�����ƫ�������ֵ�������������Ϊ�Ľ�ǰ�� һ�롣
(3) �Ľ����ģ��ͨ��������ת����2������״̬�Զ�������Э����Ϊ�������Э�������ٶ�̬��Ŀ���ṩ����Ч;����ʵ���˻��������Ŀ����١�
(4) ��AgentȺ������㷨�Ż��ȷ����д���һ���о���
�ο����ף�
[1] ������, �°�, ���, ��. ���ʶ��ƶ�������Эͬ�����о��Ľ�չ[J]. ����ϵͳѧ��, 2007, 2(3): 1-7.
CAI Zi-xing, CHEN Bai-fan, WANG Lu, et al. The progress of cooperative technology for heterogeneous multiple mobile robots[J]. CAAI Transactions on Intelligent Systems, 2007, 2(3): 1-7.
[2] Sukhatme G S, Montgomery J F, Mataric M J. Design and implementation of a mechanically heterogeneous robot group[C]//Proc of SPIE Conference on Sensor Fusion and Decentralized Control in Robotic Systems 2. Boston, 1999: 122-133.
[3] Caloud P, Choi W, Lacombe J C. Indoor automation with many mobile robots[C]//Proceedings IEEE International Workshop on Intelligent Robotics and Systems��90. Tokyo, 1990: 67-72.
[4] Gerky B, Mataric M. Auction methods for multi robot control[J]. IEEE Transactions on Robotics and Automation, 2002, 18(5): 758-768.
[5] Parker L E. ALLIANCE: An architecture for fault tolerant multi-robot cooperation[J]. IEEE Transactions on Robotics and Automation, 1998, 14(2): 220-240.
[6] Ukita N, Matsuyama T. Real-time cooperative multi-target tracking by communicating active vision agents[J]. Computer Vision and Image Understanding, 2005, 97(2): 137-179.
[7] Rao A S, Georgeff M P. Modeling rational agents within a BDI-Architecture[C]//Proceedings of the Second International Conference on Principles of Knowledge Representation and Reasoning. San Mateo: Morgan Kaufmann Publishers, 1991: 473-484.
[8] Brooks R. Intelligence without representation[J]. Artificial Intelligence, 1991, 47: 139-159.
[9] �轨��, ë�¾�, ��Ң. ����Agent ��һ������������ģ��[J]. ����ѧ��, 2007, 18(3): 582-591.
LI Jian-xing, MAO Xin-jun, SU Rao. An object-oriented design model of software Agent[J]. Journal of Software, 2007, 18(3): 582-591.
[10] ̷�Զ�, ����, �ſ˻�, ��. �����Agentģ���о�����۶���ҵӰ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(1): 172-177.
TAN Xian-dong, HU Zhao-guang, ZHANG Ke-hu, et al. Constitution of multi-agent to study influence of discriminating power price on sectors[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 172-177.
[11] GAO Jian-hua, HU Xu-dong, WU Chuan-yu. Design and simulation of multi-robot logistic system[C]//Mechatronic and Embedded Systems and Applications, Proceedings of the 2nd IEEE/ASME International Conference. Beijing, 2006: 106-111.
[12] ����, ������, �Ľ�, ��. �ֲ�ʽ�˹�����ϵͳ��³���Թ�Լģ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2007, 38(5): 956-961.
GONG Tao, CAI Zi-xing, XIA Jie, et al. Reduction model of robustness for distributed artificial immune system[J]. Journal of Central South University: Science and Technology, 2007, 38(5): 956-961.
[13] ������, ���v. �˹����ܼ���Ӧ��[M]. ����: �廪��ѧ������, 2004.
CAI Zi-xing, XU Guang-you. Artificial intelligence: Principles and applications[M]. Beijing: Tsinghua University Press, 2004.
[14] Sipser M. �������۵���[M]. ������, ��. ����: ��е��ҵ������, 2000.
Sipser M. Introduction to the theory of computation[M]. ZHANG Li-ang, trans. Beijing: China Machine Press, 2000.
[15] Kanda A, Sato M, Ishii K. Environment recognition system based on multiple classification analyses for mobile robots[J]. Journal of Bionic Engineering, 2008(5): 113-120.
[16] DeLoach S A, Valenzuela J L. An agent-environment interaction model[J]. Lecture Notes in Computer Science, 2007, 4405: 1-18.
[17] Guerra-Hernandez A, Fallah-Seghrouchni A E, Soldano H. Learning in BDI multi-agent systems[C]//Proceedings of CLIMA IV: Computational Logic in Multi-Agent Systems. Berlin: Springer-Verlag, 2004: 39-44.
[18] ��Ⱥ, �ĺ�. ��Դ��Ϣ�ں�ϵͳ������ʽ�ڰ�ṹ��ģ��[J]. ���������̴�ѧѧ��, 2007, 28(5): 910-916.
LIU Qun, XIA Hong. Active blackboard model and construction of multi-source information fusion system[J]. Journal of Harbin Engineering University, 2007, 28(5): 910-916.
[19] Gonzalez R C, Woods R E. Digital image processing[M]. ������, ������, ��. ����: ���ӹ�ҵ������, 2003.
Gonzalez R C, Woods R E. Digital Image Processing[M]. RUAN Qiu-qi, QUAN Yu-zhi, trans. Beijing: Electronics Industry Press, 2003.
[20] Jung B, Sukhatme G S. Generalized region-based approach for multi-target tracking in outdoor environments[C]//Proceedings of 2004 IEEE International Conference on Robotics and Automation. New Orleans, LA, 2004: 2189-2195.
[21] Oswald N, Levi P. Cooperative vision in a multi-agent architecture[J]. Lecture Notes in Computer Science, 1997, 1310: 709-716.
�ո����ڣ�2009-01-02�������ڣ�2009-04-20
������Ŀ�������ص�����о���չ�ƻ�(��973���ƻ�)��Ŀ(A1420060159)
ͨ�����ߣ�������(1938-)���У����������ˣ����ڣ���ʿ����ʦ������Agentģ�͡���Agentϵͳ�������Ӿ����о����绰��0731-88877355��E-mail: zxcai@mail.csu.edu.cn
(�༭ �Կ�)

