DOI: 10.11817/j.issn.1672-7207.2016.06.015
��˿ڳ���ʽ�Զ�����ȡϵͳ��ҵ�����Ż�
���1������Զ1�������2
(1. ���ݽ�ͨ��ѧ ���缼���о��������� ���ݣ�730070��
2. ���ݽ�ͨ��ѧ ��ͨ����ѧԺ������ ���ݣ�730070)
ժҪ��Ϊ����߾���˫����ҵ�����ص�Ķ�˿ڳ���ʽ�Զ�����ȡϵͳ(AS/RS)������ҵЧ�ʣ���ͳ��ǻ�λ�����ָ�������������ҵʱ��Ӱ��Ļ����ϣ��������С��ָ�������깤ʱ��Ϊ�Ż�Ŀ��ļ����Ż�ģ�͡����뽻���Ͳ���˼�빹����λ�����ָ�������������������2������������ָ�������깤ʱ���Ӱ�졣�����ƶ��ν��������㷨�����������⣬���û�λ�����ָ������2���ν����������̵ķ������ģ�����Ž⣬�����������ֻ�λ�����ָ������2���Ż��������������������л���Ӱ�졢����Ƕ�ĸ��ӹ�ϵ���о�������������ν��������㷨�ڲ�ͬ�Ļ�λ��ģ��ָ�����й�ģ�¾��ܻ������⣬���нϺõ�³���Ժͼ���Ч�ʣ���ȡ��ȵ��ȷ��͡�����ڡ����ȹ������Ż������ܹ���Ч����ָ�������깤ʱ�䡣
�ؼ��ʣ��Զ�����ȡϵͳ����˿ڳ���ʽ�������Ż�����λ���䣻ָ����������˫����ҵ
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2016)06-1930-10
Integrated optimization of operations in multiple-I/O points automated storage and retrieval system
SONG Yubo1, JIANG Zhaoyuan1, SUN Bingzhen2
(1. Institute of Mechatronic Technology, Lanzhou Jiaotong University, Lanzhou 730070, China;
2. School of Traffic and Transportation, Lanzhou Jiaotong University, Lanzhou 730070, China)
Abstract: To improve the overall efficiency of multiple-I/O points automated storage and retrieval system (AS/RS) with double cargo transport characteristic, an integrated optimization model was established to minimize the completion time of command sequence on the basis of considering the influence of storage location assignment and command sequence sorting on the operation time comprehensively. The insert method and exchange method were introduced to construct search neighborhoods of storage location assignment and command sequence sorting, and the influence of the two neighborhood construction methods on the completion time of command sequence was analyzed. Finally, a two-phase tabu search algorithm was presented to solve this problem, and the optimal solution of the model was obtained by the feedback between the two stage tabu search processes of storage location assignment and command sequence sorting. The solving process embodies the mutual influences and mutual nesting relationships in the neighborhood searching process of the two optimal aspects, namely storage location assignment and command sequence sorting. The results show that the two-phase tabu search algorithm proposed in this paper can obtain satisfactory solutions under the condition of different command sequence scales and different storage location scales, and it has strong robustness and high efficiency. Compared with the First-Come-First-Served scheduling rule and Nearest-Neighbor scheduling rule, the presented optimization method can shorten the completion time of command sequence effectively.
Key words: automated storage and retrieval system; multiple-I/O points; integrated optimization; storage location assignment; command sequence sorting; double cargo transport
��˿ڳ���ʽ(multiple-I/O points)�Զ�����ȡϵͳ(automatic storage and retrieval system, AS/RS)��һ�ָ����ԡ��������������Ͳִ�ϵͳ�����ڸ�ϵͳ���ö�������˿ڣ���˿��Բ���ִ�ж���������ҵ����ͬ/���˳���ʽAS/RS��ȣ���˿ڳ���ʽAS/RS�������̴�ȡ���г̣�����ָ�����ҵ��������Ч���̿�������ʱ�䡣��˿ڳ���ʽAS/RSͨ������ʽת�˳�(elevation transfer vehicle, ETV)��������ȡ����ҵ��ETV����������η�����ҵָ���Դ��ַ��Ŀ�ĵ�ַ��ͨ������2���������Ƶ��ػ�̨���д�ȡ������������ͬʱװ��2�����ETV�����һ�˵���һ�˿��Է��ʶ�������˿��Լ���λ��ִ�ж����ҵ����λ�����ָ��ִ��˳����н�ǿ�Ĺ����ȣ������Ż��ķ��涼��������ָ�������깤ʱ�䡣����������������˿ڳ���ʽAS/RS��ҵ�Ż������ǣ��Ӽ����Ż��Ƕȿ��ǻ�λ�����ָ����������ʵ��ָ�������깤ʱ����С���������������У����ڻ�λ������Ե��о�����ͬ�˳���ʽAS/RSΪ��������ע���Ѱ�ҷ���Լ�������Ļ������Ŵ��λ�ã���Ҫ���ǻ�����ͨ�ʡ���������Լ�������������Ե�Ӱ������[1]�� ��[2]�ڼٶ����������֪������£�ͨ����������滮ģ���о��˻�λ�������⣬����ȵ���������ҵʱ�䡣�����е�[3]ͬʱ�����˻�����ת�ʺͻ����ȶ��ԣ�ͨ����Ʒ�����λ������Ϲ�ϵ���п�������ͻ�λ���䡣MUPPANI��[4]Ӧ�÷����������滮ģ�ͷ����˻��ڻ������Ļ�λ������ԶԴ洢�ռ�����ϰ��˳ɱ���Ӱ�죬����̶���λ������Խ����˶Աȡ�ENE��[5]������������㷨�������ζԻ��ڻ������Ļ�λ�������⡢�����������ҵ·���滮����������о���GAGLIARDI��[6]������洢���ԡ��������͵Ĵ洢���Ժͻ�����ͨ�ʵĴ洢���Խ����˶Աȣ����о�����������洢���Ե�ȷ����������ͻ��ֵķ������������͵Ĺ�ģ�Լ���ҵ�����������йأ�������ת�ʵĴ洢���Բ������ø�������AS/RS�����Ŵ洢���ԡ���Ӣ�µ�[7]�������������������˻��ڻ�����������ԵĻ�λָ���㷨���ܵ���˵�������������У�����ѧ���о����ǵ�������ڵ�AS/RS��λ������ԣ�������������(���磬��˿ڳ���ʽAS/RS)�Ļ�λ������Լ���û���漰�����ֹ���AS/RS��ҵָ������������������˸���ʹ��/����ʻ������С���Ĵ�ȡ����������������Petri��[8]���Ŵ��㷨[9-10]��ģ���˻��㷨[11]����Ⱥ�㷨[12]�ȣ���Щ������Ӧ���ھ��кܸߵIJ�ȷ���Ժͺ�����Ϣ������������⣬��Щ�������ܹ�ѧϰ����Ӧ�����ı仯���Ż���������ɴ洢��λ���䡢ȡ��λ��ѡ���Ŷ�ѡ���ָ��������϶��ɡ�Ȼ��������������ؿ��ǵ����ǵ�������ڵ�AS/RS�����ڶ�˿ڳ���ʽAS/RS�Ļ�λ�������ҵָ�����������Ż��о��ټ��漰���������ߴӼ����Ż��ĽǶȶԶ�˿ڳ���ʽAS/RS��λ�����ָ��������������о�������С��ָ�������깤ʱ��ΪĿ�꣬��������˫����ҵԼ�������ļ����Ż���ѧģ�ͣ���ƶ��ν��������㷨��ģ�ͽ�����⣬ͨ����λ�����ָ������2���ν����������̵ķ������ģ�����Ž⡣
��[2]�ڼٶ����������֪������£�ͨ����������滮ģ���о��˻�λ�������⣬����ȵ���������ҵʱ�䡣�����е�[3]ͬʱ�����˻�����ת�ʺͻ����ȶ��ԣ�ͨ����Ʒ�����λ������Ϲ�ϵ���п�������ͻ�λ���䡣MUPPANI��[4]Ӧ�÷����������滮ģ�ͷ����˻��ڻ������Ļ�λ������ԶԴ洢�ռ�����ϰ��˳ɱ���Ӱ�죬����̶���λ������Խ����˶Աȡ�ENE��[5]������������㷨�������ζԻ��ڻ������Ļ�λ�������⡢�����������ҵ·���滮����������о���GAGLIARDI��[6]������洢���ԡ��������͵Ĵ洢���Ժͻ�����ͨ�ʵĴ洢���Խ����˶Աȣ����о�����������洢���Ե�ȷ����������ͻ��ֵķ������������͵Ĺ�ģ�Լ���ҵ�����������йأ�������ת�ʵĴ洢���Բ������ø�������AS/RS�����Ŵ洢���ԡ���Ӣ�µ�[7]�������������������˻��ڻ�����������ԵĻ�λָ���㷨���ܵ���˵�������������У�����ѧ���о����ǵ�������ڵ�AS/RS��λ������ԣ�������������(���磬��˿ڳ���ʽAS/RS)�Ļ�λ������Լ���û���漰�����ֹ���AS/RS��ҵָ������������������˸���ʹ��/����ʻ������С���Ĵ�ȡ����������������Petri��[8]���Ŵ��㷨[9-10]��ģ���˻��㷨[11]����Ⱥ�㷨[12]�ȣ���Щ������Ӧ���ھ��кܸߵIJ�ȷ���Ժͺ�����Ϣ������������⣬��Щ�������ܹ�ѧϰ����Ӧ�����ı仯���Ż���������ɴ洢��λ���䡢ȡ��λ��ѡ���Ŷ�ѡ���ָ��������϶��ɡ�Ȼ��������������ؿ��ǵ����ǵ�������ڵ�AS/RS�����ڶ�˿ڳ���ʽAS/RS�Ļ�λ�������ҵָ�����������Ż��о��ټ��漰���������ߴӼ����Ż��ĽǶȶԶ�˿ڳ���ʽAS/RS��λ�����ָ��������������о�������С��ָ�������깤ʱ��ΪĿ�꣬��������˫����ҵԼ�������ļ����Ż���ѧģ�ͣ���ƶ��ν��������㷨��ģ�ͽ�����⣬ͨ����λ�����ָ������2���ν����������̵ķ������ģ�����Ž⡣
1 ��������
��˿ڳ���ʽAS/RS��λ�����ָ�������Ż����������Ϊ������ָ��Դ��ַ��Ŀ�ĵ�ַ�Լ����ָ���Դ��ַ����ȷ�����ջ�λ������Ϊ�������Ļ����ṩ�Ĵ洢λ�ü��ϣ�ͬʱԼ��ÿ���ջ�λ���洢1����������ָ�������ҵָ�����У���ETV����ִ�У�ETV����˫����ҵ��������ͬʱִ��ָ����С�ڵ���2����ҵָ��һ����ʼִ�б㲻���жϣ������뽫�����Դ��ַ���˵�Ŀ�ĵ�ַ����λ����/ռ��״̬��֪�����ܵ�Ԫ����ݳ���Ϊ��ֵ������������װ�ػ��������£�ETV��ˮƽ�ʹ�ֱ������������˶����ٶ���֪������ETVȡ���ʹ����ʱ�������������ǣ����ȷ������������洢λ�÷��䷽�������ų����ָ��ִ��˳��������Լ��������ǰ���£�ʹָ�����е����ʱ����С��
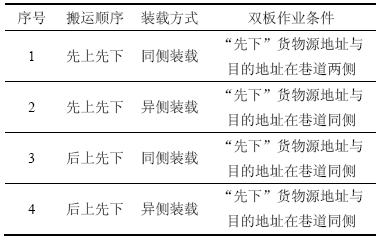
������˫����ҵ����ܹ���Ч����ָ�������깤ʱ�䣬ETVִ��˫����ҵ����������������1) ����·����2��ָ��Ϊ����ָ���2�������˵Ļ���������������ͬ�����غϵİ���·����2) ����˳����װ�ط�ʽ����2������ͬʱװ�ص�ETV�ػ�̨������İ���˳��ɷ�Ϊ4�֣������������¡��������Ϻ��¡������������¡��͡����Ϻ��¡��������װ�ط�ʽ�ɷ�Ϊ2�֣�����ͬ��װ�ء��͡����װ�ء�����2������ͬʱ���˵Ĺ����У�����˳����϶�Ӧ��ϵ���1��ʾ����1�У��������¡������뿪ETV�ػ�̨ʱ������һ��������棬�����ִ��˫����ҵ�����հ���˳���װ�ط�ʽ�IJ�ͬ��Ϲ��ɵ�˫����ҵ�������2��ʾ����2����4�������Ӧͼʾ��ͼ1��ʾ����������1)������2)��2����ҵָ�����ETVִ��˫����ҵ��2��ָ���Ƿ�����˫����ҵ�����ɦ�����������=1��ʾ����˫����ҵ��������=0��ʾ������˫����ҵ������

ͼ1 ˫����ҵλ�ù�ϵͼ
Fig. 1 Position relationship of double cargo transport
��1 ����˳����϶�Ӧ��ϵ
Table 1 Corresponding relationship of transport sequence combination

��2 ˫����ҵ����
Table 2 Double cargo transport conditions
2 ��ѧģ��
2.1 ���Ŷ���
��λ�����漰���ļ����������ҵָ��ϺͿջ�λ���ϣ��ֱ��ʾΪCs��Le��ָ�����������漰���ļ����г����ָ�����м���Ca��Cs��Ca�е�Ԫ����������Cs�е�ָ��i���j��ֻ��Դ��ַ��û��Ŀ�ĵ�ַ��Ca�е�ָ��i��j����Դ��ַ����Ŀ�ĵ�ַ��TcΪETV���ȫ����ҵָ������ʱ�䣻��TiΪ��ҵָ��iִ��ʱ�䣬BiΪָ��i��ʼ��ҵʱ�䣬EiΪָ��i������ҵʱ�䣬����Ti=Ei-Bi����ҵָ��j��ִ��ʱ��Tj=Ej-Bj������BjΪָ��j��ʼ��ҵʱ�䣬EjΪָ��j������ҵʱ�䡣TijΪָ��ִ����ʱ�䣬��ETV��ǰ1��ָ��i��Ŀ�ĵ�ַ�ƶ�����ǰָ��j��Դ��ַ����ʱ�䣬Tij=Bj-Ei����ָ�����е��еĵ�1��ָ����ԣ�TijΪETV�Ӵ���λ�ƶ�����1��ָ��Դ��ַ����ʱ�䡣(Sdi��Wdi��Hdi)Ϊָ��i��Ŀ�ĵ�ַ������Sdi��Wdi��Hdi�ֱ�Ϊָ��i��Ŀ�ĵ�ַ�IJ�����ꡢ�з�������Ͳ㷽�����ꣻ(Soj��Woj��Hoj)Ϊָ��j��Դ��ַ��Soj��Woj��Hoj�ֱ�Ϊָ��j��Դ��ַ�IJ�����ꡢ�з�������Ͳ㷽�����ꡣqijΪETVִ��ָ��i֮����ָ��jδִ��֮ǰ�ػ�̨�ػ�������PΪ��λ���ȣ�QΪ��λ�߶ȡ�VwΪETV�з����ٶȣ�VhΪETV�㷽���ٶȡ���ҵָ�ʼʱ��Bi�ͽ���ʱ��Ei���������ʱ�䣬ETV��ɵ���ָ��������ҵʱ���ʾΪ
 (1)
(1)
ģ���еľ��߱��� Ϊ��λѡ����߱�������ȡ0��1��ȡ1��ʾ�����ҵָ��i��ѡ��ջ�λk��ΪĿ�ĵ�ַ��
Ϊ��λѡ����߱�������ȡ0��1��ȡ1��ʾ�����ҵָ��i��ѡ��ջ�λk��ΪĿ�ĵ�ַ�� ��
�� ������ȡ0��YijΪָ���������Ӧ�䣬��ȡ0��1��ȡ1��ʾETVִ����ָ��i��ִ��ָ��j(
������ȡ0��YijΪָ���������Ӧ�䣬��ȡ0��1��ȡ1��ʾETVִ����ָ��i��ִ��ָ��j( )������ȡ0�����⣬Ϊ�˷������˫����ҵ��Լ������������3���������Dij��Mij��Nij��Dij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��ҵ·�����������ͬ�������غ�()������ȡ0��Mij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��Դ��ַ��Ŀ�ĵ�ַ�IJ���������
)������ȡ0�����⣬Ϊ�˷������˫����ҵ��Լ������������3���������Dij��Mij��Nij��Dij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��ҵ·�����������ͬ�������غ�()������ȡ0��Mij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��Դ��ַ��Ŀ�ĵ�ַ�IJ��������� ()������ȡ0��Nij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��ָ��j��Դ��ַ��Ŀ�ĵ�ַ�������ͬ��()������ȡ0��
()������ȡ0��Nij��ȡ0��1��ȡ1��ʾ����2��ָ��i��j��ָ��j��Դ��ַ��Ŀ�ĵ�ַ�������ͬ��()������ȡ0��
2.2 ��ѧģ��
�����������ڼ����Ż����⣬�漰����λ�����ָ����������2��������Ż����ݣ���������Գ���Ϊ���������滮ģ�͡��ڻ�λ�������ETV��ҵʱ�����Ϊ�Ż�Ŀ�꣬����˫����ҵ��Լ��������ȷ���������λ���䷽������ָ����������Σ��������ַȷ����ָ��ִ��˳���ȷ����ת��Ϊ�������յ�ij���·���滮����(vehicle routing problems��VRP)��VRP�����Ѿ���֤����NP-hard���⣬����ģ���пջ�λ��ѡ���ϵĹ�ģ��VRP�����Ҹ����ӣ�ETV���ʵ�ַ˳��滮�迼�ǵ�ַ���ʵĿ����ԡ�˫����ҵ���������أ���Լ��������VRPģ���ϸ�
����ѧģ�͵�Ŀ�꺯��Ϊ
 (2)
(2)
Լ������Ϊ
 (3)
(3)
 ��
�� (4)
(4)
 �� (5)
�� (5)
 ��
�� (6)
(6)
 ��
�� (7)
(7)
 ��
�� (8)
(8)
 ��
�� (9)
(9)
���У�ʽ(3)ȷ������ͬ1���˿ڳ��������ָ�������ڳ���ָ��ִ�У�ʽ(4)ȷ��������ָ��ִ�й����У�ETV�ػ�̨�ϵĻ��ﲻ����2����ʽ(5)ȷ��ָ��i��j�ܹ�ִ��˫����ҵ��ʽ(6)ȷ��Ϊ�������Ļ������1���ջ�λ�洢��ʽ(7)ȷ��ÿ���ջ�λ���ֻ�ܴ洢1�����ʽ(8)ȷ��ÿ����ҵָ�����ֻ����1��������ҵָ�ʽ(9)ȷ��ÿ����ҵָ�����ֻ����1����ǰ��ҵָ�
3 �����ص����㷨ʵ��
3.1 �����ص�
���Ϊ�������е�����ָ�����У�Tc����ָ��ִ��ʱ���ָ��ִ����ʱ�䣬�����Ŀ������ָ�����м��Ϧ����ҵ���*��ʹ
 (10)
(10)
��ʽ(2)��ʽ(10)��֪�����ָ�����е���С�깤ʱ������ҵ�1����λ���䷽����1��ָ��������ʹָ��ִ����ʱ����ָ��ִ��ʱ��֮����С��ָ��Դ��ַ��Ŀ�ĵ�ַȷ������ִ��ʱ��Ϊ��ֵ�������ʽΪ
 (11)
(11)
����1 ��ʽ(2)��֪����ָ�����е�ָ��ִ��ʱ��Ϊ��ֵʱ��ָ�������깤ʱ��ֻ��ָ��ִ����ʱ���йء���Ϊÿ��ָ���Դ��ַ��Ŀ�ĵ�ַ��֪����������ָ��ִ����ʱ�����Ԥ�ȵõ�����������ָ��ִ����ʱ���γ�(n+1)��(n+1)ʱ��������T(����ETV����λ)����
 (12)
(12)
���У�tij�ļ��㹫ʽΪ
 (13)
(13)
��ָͬ��������ָ��ִ����ʱ���ֱ�ӷ��ʾ���T�õ�����ˣ�����ָ�������깤ʱ���ʱ�临�Ӷ�Ϊo(n)��
���� 1 ��������1�����е�ָ�����ЦУ�����ָ��i�嵽ָ��j֮���������е�ָ�����Ц�*����С�깤ʱ��Ϊ

 (14)
(14)

 (15)
(15)

 (16)
(16)
֤�� ����ָ�����Ц�������ָ��i��ָ�������е�λ����ɾ���Ͳ���2�����衣ָ��i��ָ�����Ц���ɾ��������2��ָ�����ڹ�ϵ(i-1��i)��(i��i+1)��ͬʱ����1�����ڹ�ϵ(i-1��i+1)����ָ�����Це�ʱ������Ϊ ��ָ��i���뵽ָ�����Ц��н�������1��ָ�����ڹ�ϵ(j��j+1)��ͬʱ������2�����ڹ�ϵ(j��i)��(i��j+1)����ָ�����Це�ʱ������Ϊ
��ָ��i���뵽ָ�����Ц��н�������1��ָ�����ڹ�ϵ(j��j+1)��ͬʱ������2�����ڹ�ϵ(j��i)��(i��j+1)����ָ�����Це�ʱ������Ϊ ������ָ������й�ϵ���䣬��ˣ�
������ָ������й�ϵ���䣬��ˣ� ��ʽ(14)��֤��ͬ����֤ʽ(15)��ʽ(16)��֤�ϡ�
��ʽ(14)��֤��ͬ����֤ʽ(15)��ʽ(16)��֤�ϡ�
����2 ��������1��ָ�����ЦУ�����ѡȡ2����ҵָ��i��j����2��ָ������γ��µ�ָ�����Ц�*������ָ�����Ц�*����С�깤ʱ��Ϊ

 (17)
(17)
 (18)
(18)

 (19)
(19)
֤�� ����ָ�����Ц�������2��ָ��i��j��λ�ÿɷֳ�2��������������Ƚ�ָ��i����ָ��j��λ�ã��ٽ�ָ��j����ָ��i��λ�ã�ָ��i����ָ��j��λ�ý�����2��ָ�����ڹ�ϵ(i-1��i)��(i��i+1)��ͬʱ����2�����ڹ�ϵ(i-1��j)��(j��i+1)��������ָ�����Це�ʱ������Ϊ
 ��ͬ����ָ��j����ָ��i��λ�ý�����2��ָ�����ڹ�ϵ(j-1��j)��(j��j+1)��ͬʱ����2�����ڹ�ϵ(j-1��i)��(i��j+1)��������ָ�����Це�ʱ������Ϊ
��ͬ����ָ��j����ָ��i��λ�ý�����2��ָ�����ڹ�ϵ(j-1��j)��(j��j+1)��ͬʱ����2�����ڹ�ϵ(j-1��i)��(i��j+1)��������ָ�����Це�ʱ������Ϊ �����ԣ�����ָ��i��j��λ�ú��µ�ָ�����Ц�*���ָ�����Цв�����ʱ������Ϊ
�����ԣ�����ָ��i��j��λ�ú��µ�ָ�����Ц�*���ָ�����Цв�����ʱ������Ϊ ����
����
 ��ʽ(17)��֤��ͬ����֤ʽ(18)��ʽ(19)��֤�ϡ�
��ʽ(17)��֤��ͬ����֤ʽ(18)��ʽ(19)��֤�ϡ�
3.2 �㷨ʵ��
���������㷨����������⼯���Ż����⣬�����˼����ͨ�����в����ҵ��ֲ����Ž⣬������ɢ����ʵ��ȫ������[13]�����ж��ν��������㷨�Dz��ö༶�ֽ�ķ����������Ż���������Ķ������ʽ�㷨��ESCOBAR��[14-15]Ӧ�ø��㷨�ɹ�������������������е�LRP����Ͳֿ�Ѷ���������⣬���IJ��ø��㷨��Ϊ�����ò�ͬ�Ż�����ķ������ù�ϵ���Էֱ��Ż�������õĽ�����ܼ������ʱ����Ը��ƣ��Ի�ȡ�����Ż������ȫ�����Ž⡣
������ƵĶ��ν��������㷨�Ļ���˼���ǣ��������Ϊ��λ�����ָ������2���ν�����⣬�ڻ�λ����Σ����ڵ�ǰ�ij����ָ�����У��ڿջ�λ����(�ջ�λ���ϰ����Ѿ�Ϊ���ָ�����Ŀջ�λ��ʣ��Ŀջ�λ)����������λ���䷽�����������ָ��ƥ�䣬�γ������ij����ָ�����У�ָ������������Ը�����Ϊ�Ż������ڵ�ǰָ�����й�����������ͨ����1�������㷨������������ȡָ��������ѵ�ִ��˳��ָ����������Ϊ��λ����ν������������ݣ���һ��Ӱ���λ����ζԻ�λ���䷽�����������㷨������ͼ2��ʾ�����㷨ͨ��ѭ����ʽ��ǰһ�ε�����������ݵ���һ�Σ�ʵ���������������л�λ�����ָ������֮����Ϣ�ķ�������ȡ��λ����-ָ�����������Ż�ģ�͵�ȫ�����Ž⡣���潫���㷨�еļ����ؼ����ڼ��Խ��ܡ�
3.2.1 ��ʼ��Ĺ���
��ʼ��Ļ�λ���䷽������ʱ��������ԭ��ͨ�������뾶�����ķ��������������˼���������ָ���Դ��ַΪԲ�ģ������뾶�Ե�����λ�ߴ��ʱ�����Ϊ��λ�������ڿջ�λ���ϵ��������ջ�λ�����ڻ�λ���ȡ���λ�߶��Լ�ETV��ˮƽ�ʹ�ֱ���������ٶȲ�ͬ������ת��ϵ�� (round(��)Ϊ��ת��ϵ��Բ��)��ͳһ����ˮƽ����ʹ�ֱ�����ʱ����롣������������ͼ3��ʾ���㷨�������£�
(round(��)Ϊ��ת��ϵ��Բ��)��ͳһ����ˮƽ����ʹ�ֱ�����ʱ����롣������������ͼ3��ʾ���㷨�������£�
i=1; Flag=false;
for (m=1; m��|Cs|; m++)
While (Flag =false)
for (j=1; j��Nlevel; j++)
for (k=1; k��j*round(��); k++)
if ( )
)
�������ָ��Ŀ�ĵ�ַ��
Flag=true;
break;
end if;
end;
for (l=1; l��j-1; l++)
if ( )
)
�������ָ��Ŀ�ĵ�ַ��
Flag=true;
break;
end if;
end;
if (Flag=true) break;
end;
end;

ͼ2 ���ν��������㷨����
Fig. 2 Process of two-stage tabu search algorithm
Ϊ�˶�ָ�����н�����������2������C1��C2�����У�C1= ��C2={������ҵָ��}�����ȸ���ʽ(11)�õ�ʱ��������T����T�в��ҵ�0�е���Сֵ����t0i��С����ָ��ci���ӵ�����C1�У�ͬʱ�ڼ���C2�н�ָ��ciɾ����Ȼ����T�в��ҵ�i�У���tij��С����ָ��cj�Ƿ����ڼ���C1�������ڣ��������ھ���T�в��ҵ�i�еĴ�Сֵ��ֱ�����ҵ�ָ��cj�����ڼ���C1����ֵ��С����ָ��cj�Ӽ���C2��ת�Ƶ�����C1�С��´β��Ҿ���T�ĵ�j�У����ҵ���ָ��Ӽ���C2��ת�Ƶ�����C1�У�ֱ��ת��C2��ȫ��ָ�����������ָ����뼯��C1���Ⱥ�˳����1����ʼ�⡣�㷨�������¡�
��C2={������ҵָ��}�����ȸ���ʽ(11)�õ�ʱ��������T����T�в��ҵ�0�е���Сֵ����t0i��С����ָ��ci���ӵ�����C1�У�ͬʱ�ڼ���C2�н�ָ��ciɾ����Ȼ����T�в��ҵ�i�У���tij��С����ָ��cj�Ƿ����ڼ���C1�������ڣ��������ھ���T�в��ҵ�i�еĴ�Сֵ��ֱ�����ҵ�ָ��cj�����ڼ���C1����ֵ��С����ָ��cj�Ӽ���C2��ת�Ƶ�����C1�С��´β��Ҿ���T�ĵ�j�У����ҵ���ָ��Ӽ���C2��ת�Ƶ�����C1�У�ֱ��ת��C2��ȫ��ָ�����������ָ����뼯��C1���Ⱥ�˳����1����ʼ�⡣�㷨�������¡�
1) ��ʼ��ʱ��������T��

2) while ( )
)
{�ھ���T�в��ҵ�i�е���Сָ��ִ����ʱ�䣬��Ϊtij��cj�����ڼ���C1������ }
}
3) ��C1��ָ��ս���˳����ɳ�ʼָ�����Ц�0���㷨������
3.2.2 ������������
����0-1������ʾ�ջ�λ���䷽����0��ʾδѡ��Ŀջ�λ��1��ʾ��ѡ��Ŀջ�λ����λ����ε�ǰ�������ͨ��1-0��1-1��2�ֽ�����������������������ͼ4��ʾ����λ���䷽��ȷ����ָ��ִ��ʱ���ָ��ִ����ʱ�䰴ʽ(11)��ʽ(13)���¡�
ָ������ε�������ò��뷨�ͽ���������������������ͼ5��ʾ��������ѡ��ͽ���ָ���ѡ���������������ݶ���1�������ǰ���ָ�������깤ʱ�����������ݶ���2���㽻��ǰ���ָ�������깤ʱ��������

ͼ3 ���ָ��Ŀ�ĵ�ַ��������ʾ��ͼ(��=3)
Fig. 3 Search process diagram of storage command destination address (��=3)

ͼ4 ��λ���������
Fig. 4 Neighborhood construction in storage location assignment stage

ͼ5 ָ�����������
Fig.5 Neighborhood construction in command sequence sorting stage
3.2.3 ��������
�ڶ��ν������������ж����˲�ͬ�Ľ��ɶ���λ�����ѡ�����ָ�������λ�������Ϊ���ɶ���ͨ��ָ�������ͻ�λ����ǰ���Ӧ�γɵĶ�ά�����м�¼����ʾ����ָ�����������ѡ��ָ��������Ϊ���ɶ���ͨ��ָ���������ɵ��м�¼����ʾ�����εĽ��ɱ���ʹ�ö�ά��������¼������������ɽ��ɶ����м�¼��Ԫ����ȷ��������������ɽ��ɳ���ȷ����ÿ����1�Σ������е�����Ԫ������Ϊ��λ����1�У��ͷ������곬�����ɳ��ȵĽ��ɶ����µõ��Ľ��ɶ�����뵽��ά����ĵ�1�С����������������н��ɶ����������������ڿ��Եõ��ͷ�֮�⣬ָ�������깤ʱ��С�ڵ�ǰ���Ž�Ľ��ɶ���������⡣
4 ��������
�Թ���ij���ʻ�����װ���Զ�����ȡϵͳΪ��������1̨ETV������ҵ��������䴹ֱ������ٶ�Ϊ0.4 m/s��ˮƽ������ٶ�Ϊ2 m/s����λ����Ϊ2.8 m�����Ϊ2.4 m��ѡ��100(2�š�5���10��)��150(2�š�5���15��)��200(2�š�5���20��)��300(2�š�5���30��)��450(2�š�5���45��)5�ֻ�λ����ģ��10�л�������4�������˿ڣ��ղ�½���2����15�л�������6�������˿ڣ��ղ�½���3����20�л�������10�������˿ڣ��ղ�½���5����30�л�������15�������˿ڣ��ղ�8����½��7����45�л�������23�������˿ڣ��ղ�13����½��10����ѡ��5��10��15��20��30��5��ָ�����й�ģ�����������ö�μ���ȡƽ��ֵ�ķ�ʽ����¼�����������ȡ10�Ρ���ʼ��λ�Ƿ�ռ�����������ȷ������ȷ���Ļ�λ״̬��������ɳ����ָ����õķ��湤��ΪMatlab7.0������ļ��������Ϊ��������Intel(R)Core(TM)i5@2.5 GHz���ڴ�4.00 GB��Ϊ�˱Ƚϱ����㷨�ڲ�ͬ��ָ�����й�ģ�Ͳ�ͬ��λ��ģ�¶Գ�ʼ��ĸ������ܣ��ֱ�ȡ5�ֹ�ģ��ָ�����к�5�ֹ�ģ�Ļ�λ���з��棬ÿ��ָ�����й�ģ�µĻ�λ��ģ��ͬ����Ϊ2��5��30��300��λ�Ĺ�ģ��ÿ�ֻ�λ��ģ���µ�ָ�����й�ģ��ͬ����Ϊ10������������3�ͱ�4��
��3 ��ָͬ�����й�ģ�ķ�����
Table 3 Simulation results of different command scales

��4 ��ͬ��λ��ģ�ķ�����
Table 4 Simulation results of different storage location scales
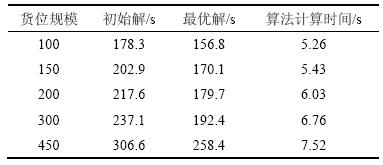
��ʼ��ĶԱȽ����������ʼ�⾭���ν����㷨�Ż�֮��õ���ETV��ҵʱ����������̣���ָͬ�����й�ģ��ƽ����ҵʱ��������15.17%����ͬ��λ��ģ��ƽ����ҵʱ��������16.06%���㷨�ļ���ʱ������ָ�����й�ģ�ͻ�λ��ģ�������������ӣ�����ѵĻ�λ���䷽����ָ��ִ��˳������ں����ļ���ʱ���ڵõ������㺽�ջ�վAS/RSʵ�ʲ����е�ETV����������ͼ6���Կ�������Բ�ͬ��ָ�����й�ģ�������㷨��������30��������������������Ž⣬�Ҳ�����Ϊ��λ��ģ��ָ�����й�ģ�����Ӷ�Ӱ���㷨��������ܣ����нϺõ�³���ԡ�
Ϊ����֤���ļ����Ż��㷨�����ܣ�ȡ2��5��30��300��λ����Բ�ָͬ�����й�ģ���Ի�λ�� ��-ָ������ֱ��Ż������ͱ��ļ����Ż��������з���Աȣ����������5��ʾ�����зֱ��Ż��л�λ��������Ŵ��㷨��ָ���������̰���㷨���ɱ�5��֪�����ڲ�ָͬ�����й�ģ�������Ż��㷨�ڽ�����ܱȷֱ��Ż������ĺã�����ʱ����Ż������ĵͣ����Ľ��ʷֱ�ﵽ11.09%��23.98%���������ڷֱ��Ż�����ֻ�л�λ���䵽ָ���������Ϣ���ݣ�ȱ��ָ������λ����ķ���������������ļ����Ż����������˶���֮��Ĺ�ϵ��������λ����δ洢λ�õı仯���Դ��ݵ�ָ������Σ���ָ�������ָ��˳��ı仯Ҳ���Է�������λ����Ρ��ڸ��Զ������Ż������У�2���Ż�������ܹ�ͳ��ǻ�λ�����ָ�������ָ�������깤ʱ���Ӱ�죬ͨ����ͬ�Ż�����ķ��������Լ��㷨�ļ���
���Ժ���ɢ���ԵĹ�ͬ���ã�����������ȫ�����Ž⡣
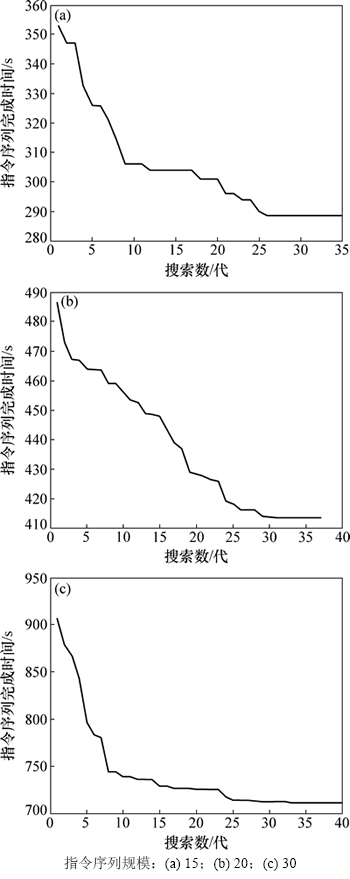
ͼ6 �㷨��������
Fig. 6 Convergence curves of algorithm
��5 ��ͬ�Ż����������ܶԱ�
Table 5 Performance comparison of different optimization methods

��6 ��ͬ���ȹ���Ľ���Ա�
Table 6 Comparison results of different scheduling rules

Ϊ����֤���ļ����Ż���������Ч�ԣ�ѡ���λ��ģΪ300����Բ�ָͬ�����й�ģ���ֱ���á�����ڡ����ȹ���(nearest-neighbour scheduling��NN)�͡��ȵ��ȷ����ȹ���(first-come-first-served scheduling��FCFS)���з���ʵ�飬���뱾���Ż��������жԱȣ��������6��ʾ��
�ɱ�6��֪���ڲ�ָͬ�����й�ģ�£����ĵ��Ż�������õ�ETV��ҵʱ���FCFS��NN���ȹ�����иĽ���ƽ���Ľ��ʷֱ�Ϊ25.78%��8.94%��3�ֵ��ȹ����£�FCFS����ҵЧ����ͣ��������ڸõ��ȹ���Ҫ��ָ��ִ��˳��Ҫ�ϸ�������˳��ִ�У�ETV����ҵЧ��ֻ��ͨ����λ����һ������Ż�����ߡ�NN���ȹ���������ʱ��������ԭ���ȡ�洢��λ�ķ��䷽�������ڴ˻����ϻ���NN���ȹ������ָ�������������������ͬʱ������ETV��˫����ҵ������NN���ȹ�����˶Ի�λ����������Ż���ͬʱҲ��ָ�����н�����һ���̶ȵ��Ż������Ż�������ָ�������깤ʱ���FCFS���ȹ����µ�ʱ��̡����ǣ��뱾���Ż�������ȣ�NN���ȹ���ֻ�߱���λ����ε�ָ����������εĵ�����Ϣ�����Ż������Ż�����ȱ��ָ������ε���λ����ε���Ϣ��������NN���ȹ����ָ��������һ�������ƣ���ˣ������Ż������ܹ���ñ�NN���ȹ�����õĽ����
5 ����
1) ��˿ڳ���ʽAS/RS����˫����ҵ����ָ�������λѡ����ָ�����������ǿ�����ԣ��Ӽ����Ż��ǶȽ����Ż�������ѧģ�ͣ���������ν��������㷨����ģ����⣬��Ч�ؽ���˶�˿ڳ���ʽAS/RS��λѡ�����ҵָ�������Ż����⡣
2) �ܽ��˲��뷨�ͽ�������ָ��������С�깤ʱ���Ӱ����ɣ�����˻��ڲ��뷨�ͽ�������������������ָ�������깤ʱ�䣬�������㷨��ʱ�临�Ӷȡ�
3) ��ͬ��ģ��ָ�����кͻ�λ�����ķ�����������������Ļ�λ�����ָ�������Ż�ģ�ͼ�����ⷽ�����нϺõ�³���ԣ���ֽ��Ż��㷨�ĶԱ���֤�˶��ν��������㷨����Ч�Ժͼ���Ч�ʣ��벻ͬ���ȹ���ĶԱȷ������������Ľ����ļ����Ż�ģ�ͼ�����ⷽ���ܹ���Ч��߶�˿ڳ���ʽAS/RS������ҵЧ�ʡ�
�ο����ף�
[1] MUPPANI V R, ADIL G K. A branch and bound algorithm for class based storage location assignment[J]. European Journal of Operational Research, 2008, 189(2): 492-507.
[2] A. Optimizing the storage assignment in a warehouse served by milkrun logistics[J]. International Journal of Production Economics, 2011, 133(1): 312-318.
[3] ������, ��ӳ��, ���, ��. ���ڵ��Ȳ��Ե��Զ����ֿ�ϵͳ�Ż������о�[J]. �������������ϵͳ, 2006, 12(9): 1438-1443.
LIU Sainan, KE Yinglin, LI Jiangxiong, et al. Optimazation for automated warehouse based on scheduling policy[J] . Computer Integrated Manufacturing Systems, 2006, 12(9): 1438-1443.
[4] MUPPANI V R, ADIL G K. A branch and bound algorithm for class based storage location assignment[J]. European Journal of Operational Research, 2008, 189(2): 492-507.
[5] ENE S,  N. Storage location assignment and order picking optimization in the automotive industry[J]. International Journal of Advanced Manufacturing Technology, 2012, 60(5/6/7/8): 787-797.
N. Storage location assignment and order picking optimization in the automotive industry[J]. International Journal of Advanced Manufacturing Technology, 2012, 60(5/6/7/8): 787-797.
[6] GAGLIARDI J P, RENAUD J, RUIZ A. On storage assignment policies for unit-load automated storage and retrieval systems[J]. International Journal of Production Research, 2012, 50(3): 879-892.
[7] ��Ӣ�£�³����. ��������Ե������Ի�λ�Ż���ģ�����㷨[J]. ��е����ѧ��, 2011, 47(20): 75-80, 88.
LI Yingde, LU Jiansha. Model and algorithm for periodic storage allocation based on correlations[J]. Journal of Mechanical Engineering, 2011, 47(20): 75-80, 88.
[8] ����ΰ, ��Ӣ��, ��ҫ��. ����ִ������Ľ�ģ������ϵͳ��Ʒ���[J]. �������������ϵͳ, 2009, 15(12): 2335-2342, 2390.
XU Xiaowei, LIANG Yinghong, WU Yaohua. Modeling and control program design of automated storage and retrieval system[J]. Computer Integrated Manufacturing Systems, 2009, 15(12): 2335-2342, 2390.
[9] ����, ������, ����. ���ؾ��Զ�����ȡϵͳ��ҵ�����Ż�[J]. �������������ϵͳ, 2013, 19(7): 1626-1632.
YANG Peng, MIAO Lixin, QIN Lei. Job scheduling optimization in multi-shuttle automated storage and retrieval system[J]. Computer Integrated Manufacturing Systems, 2013, 19(7): 1626-1632.
[10]  Application of genetic algorithms for sequencing of AS/RS with a triple-shuttle module in class-based storage[J]. Flexible Services and Manufacturing Journal, 2014, 26(3): 432-453.
Application of genetic algorithms for sequencing of AS/RS with a triple-shuttle module in class-based storage[J]. Flexible Services and Manufacturing Journal, 2014, 26(3): 432-453.
[11] BESSENOUCI H N, SARI Z, GHOMRI L. Metaheuristic based control of a flow rack automated storage retrieval system[J]. Journal of Intelligent Manufacturing, 2012, 23(4): 1157-1166.
[12] HU Kuanyu, CHANG Tiansheng. An innovative automated storage and retrieval system for B2C e-commerce logistics[J]. International Journal of Advanced Manufacturing Technology, 2010, 48(1/2/3/4): 297-305.
[13] ����ѵ, л����. �ִ��Ż����㷽��[M]. 2��. ����: �廪��ѧ������, 2007: 51-52.
XING Wenxun, XIE Jinxing. Modern optimization computing method[M]. 2nd ed. Beijing: Tsinghua University Press, 2007: 51-52.
[14] ESCOBAR J W, LINFATI R, BALDOQUIN M G, et al. A granular variable Tabu neighborhood search for the capacitated location-routing problem[J]. Transportation Research Part B: Methodological, 2014, 67: 344-356.
[15] �F, ½־ǿ. ���ڶ��������ڵIJִ���ҵ���Ƚ�ģ���Ż�[J]. �Ϻ���ͨ��ѧѧ��, 2009, 43(12): 1917-1922.
CHEN Min, LU Zhiqiang. Modeling and optimization on operation scheduling with total tardiness objective for a storage system[J]. Journal of Shanghai Jiaotong University, 2009, 43(12): 1917-1922.
(�༭ ����ΰ)
�ո����ڣ�2015-06-30�������ڣ�2015-08-11
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61563029)�����ҿƼ�֧�żƻ�������Ŀ(2012BAH20F05)�����ݽ�ͨ��ѧ�������������Ŀ(2011012)(Project(61563029) supported by the National Natural Science Foundation of China; Project(2012BAH20F05) supported by the National Science & Technology Pillar Program, China; Project(2011012) supported by the Youth Foundation of LanZhou Jiaotong University, China)
ͨ�����ߣ��������ʿ�������ڣ���������ִ�ϵͳ��ģ���Ż���E-mail��songyubo@mail.lzjtu.cn

