Design of hybrid damping controller based on multi-target gravitational search optimization algorithm in a multi-machine power system with high penetration of PV park
来源期刊:中南大学学报(英文版)2016年第5期
论文作者:Y. Hashemi H. Shayeghi M. Moradzadeh A.Safari
文章页码:1163 - 1175
Key words:hybrid controller; multi-objective optimization; large-scale photovoltaic park; small-signal scrutiny
Abstract: a mathematical approach was proposed to investigate the impact of high penetration of large-scale photovoltaic park (LPP) on small-signal stability of a power network and design of hybrid controller for these units. A systematic procedure was performed to obtain the complete model of a multi-machine power network including LPP. For damping of oscillations focusing on inter-area oscillatory modes, a hybrid controller for LPP was proposed. The performance of the suggested controller was tested using a 16-machine 5-area network. The results indicate that the proposed hybrid controller for LPP provides sufficient damping to the low-frequency modes of power system for a wide range of operating conditions. The method presented in this work effectively indentifies the impact of increased PV penetration and its controller on dynamic performance of multi-machine power network containing LPP. Simulation results demonstrate that the model presented can be used in designing of essential controllers for LPP.
J. Cent. South Univ. (2015) 22: 1163-1175
DOI: 10.1007/s11771-016-0366-7

Y. Hashemi1, H. Shayeghi1, 2, M. Moradzadeh3, 4, A.Safari5
1. Technical Engineering Department, University of Mohaghegh Ardabili, Ardabil, Iran;
2. Centre of Excellence for Power System Automation and Operation, Department of Electrical Engineering,
Iran University of Science and Technology, Tehran, Iran;
3. Centre for Engineering Innovation, Department of Electrical and Computer Engineering,
University of Windsor, Windsor, Canada;
4. Electrical Energy Laboratory, Department of Electrical Energy, Systems and Automation,
Ghent University, Ghent, Belgium;
5. Department of Electrical Engineering, Azarbaijan Shahid Madani University, Tabriz, Iran
 Central South University Press and Springer-Verlag Berlin Heidelberg 2015
Central South University Press and Springer-Verlag Berlin Heidelberg 2015
Abstract: a mathematical approach was proposed to investigate the impact of high penetration of large-scale photovoltaic park (LPP) on small-signal stability of a power network and design of hybrid controller for these units. A systematic procedure was performed to obtain the complete model of a multi-machine power network including LPP. For damping of oscillations focusing on inter-area oscillatory modes, a hybrid controller for LPP was proposed. The performance of the suggested controller was tested using a 16-machine 5-area network. The results indicate that the proposed hybrid controller for LPP provides sufficient damping to the low-frequency modes of power system for a wide range of operating conditions. The method presented in this work effectively indentifies the impact of increased PV penetration and its controller on dynamic performance of multi-machine power network containing LPP. Simulation results demonstrate that the model presented can be used in designing of essential controllers for LPP.
Key words: hybrid controller; multi-objective optimization; large-scale photovoltaic park; small-signal scrutiny
1 Introduction
1.1 Motivation and approach
The idea of large-scale photovoltaic park (LPP) according to international energy agency-photovoltaic technology plan (IEA-PVT) is delineated as a photovoltaic park ranging from 10 MW up to several GW in an area from 0.1 to 20 km2 [1]. Photovoltaic system as a renewable energy unit is increasingly integrated into power systems. The large-scale penetration of photovoltaic parks into transmission networks can have a substantial impact on power networks small-signal stability [2]. A sudden fluctuation in solar irradiation can induce a quick change in the power generated by LPP [3]. This phenomenon can cause a problem of small-signal instability [4]. On the other hand, since the LPPs have distinct dynamic behavior, their impact on the grid is completely different with that of conventional generators. The inertia-less LPPs put additional burden on the conventional synchronous generation units in power grid which have to inject the specified damping torque to guarantee the stability of the system [5]. This can stress the conventional units and may lead to instability. In order to fully understand how integration of LPP can influence the power network, a comprehensive model is required based on characteristics of photovoltaic generators. A systematic approach is necessary to guarantee adequate stability, desired performance, and robustness. The analysis is needed to verify the effects of controllers, grid stiffness, system characteristics when integrating LPPs to the system. Small-signal analysis of LPPs has been conducted in a few publications [6]. In these investigations, the study of LPPs dynamic behavior has not been covered in details. On the other hand, most of these studies are based on software simulations that are not able to establish the rationale and basis of problems [7].
It is necessary to control LPP to maintain stability. The use of appropriate controls for LPP units can ameliorate the system efficiency and can facilitate the integration of LPPs. Among damping controllers, capability of wide-area controllers to deal with the disadvantages of conventional controllers encourages us to use these controllers in LPPs [8].
1.2 Literature review
The negative impact of inertia reduction caused by high penetration of the LPP on oscillation modes was investigated [5]. The analysis and resolution were performed using small-signal analysis toolbox (SSAT) that is a part of the DSA/Tools software package. A power oscillation damping (POD) controller based on minimax linear quadratic Gaussian (LQG) methodology was developed [6]. The effectiveness of the suggested approach is compared with conventional controllers. Also, uncertainty associated with generation of LPP was surveyed [9]. The impact of ultra capacitor and battery energy storage technology related to LPP on damping of oscillation modes was assessed [10]. The results show that the presence of these auxiliary devices can enhance damping action.
1.3 Contributions
This study presents a clear understanding of the effect of LPP on power network small-signal stability. In power grid studies, not much attention has been paid to the modeling of multi-machine power system with installed LPP. This work aims to identify the model, control schemes and variables of the LPP to be considered for small-signal scrutiny. An analytical model of LPP in a multi-machine power network has been developed providing a useful framework for the management and control of power network. The model of LPP consists of photovoltaic (PV) arrays, converter dynamics, and connected control system. This model will be further expanded by a detailed eigenvalue assessment to verify the critical oscillatory modes of the system. This work proposes a state-space illustration that can be effectively used to investigate the impact of LPP on the small-signal stability of a multi-machine power grid. A methodological design style for LPP controller has been proposed based on hybrid controller. Both global data and local data construct feedback signals for the LPP controller. The proposed hybrid controller can extenuate the stress on conventional synchronous generators. The variables of hybrid controller and accelerating power PSS (PSS2B) of synchronous units are concurrently optimized by solving a two-target optimization problem considering the changes in LPP output. TOPSIS-based multi-target gravitational search algorithm (MTGSA) is applied to solve optimization problem and realize Pareto- optimal archives and the best solution associated with it. The main contributions of this work are summarized as below: 1) Modelling of the multi-machine power grid containing LPP; 2) Deriving a Phillips-Heffron model of multi-machine power network with an installed LPP; 3) Proposing a hybrid controller based on local and global data; 4) Design problem formulation and solving it by TOPSIS-based MTGSA.
2 Modelling a multi-machine power network with a LPP installed
It is assumed that before the PV park is installed in the power system, a network admittance matrix  is made, where only n generator nodes (denoted by G1, …, Gn in Fig. 1) plus nodes 1 and 2 are kept. For small- signal scrutiny, large-scale PV park is delineated by an equivalent single PV generator. The circuit equation of the network is given as below:
is made, where only n generator nodes (denoted by G1, …, Gn in Fig. 1) plus nodes 1 and 2 are kept. For small- signal scrutiny, large-scale PV park is delineated by an equivalent single PV generator. The circuit equation of the network is given as below:
 (1)
(1)
where IG=[Ig1 Ig2 … Ign]T; VG=[Vg1 Vg2 … Vgn]T. For the n-machine power system, the terminal voltage vector of the generators can be expressed in the common coordinates as
 (2)
(2)
With the installation of the LPP between nodes 1 and 2, one can obtain
 (3)
(3)
In di-qi coordinates,

 (4)
(4)
Denoting Cgik=Cgikexp(jβgik), C0k=C0kexp(jβ0k) and using Eq. (4) becomes

 (5)
(5)

 (6)
(6)
where dikg=dk-di+βgik and d0k=φ-di+βgik+β0i.
Linearizing Eqs. (5) and (6), one can obtain
 (7)
(7)

Fig. 1 PV park installed in an n-machine power grid
Taking the system shown in Fig. 1, the voltage equation can be obtained as
 (8)
(8)
Linearizing Eq. (8) and rearranging give
 (9)
(9)
Combining Eqs. (7) and (9), it can be written as
 (10)
(10)
The linearized model of the n-machine power network equipped on LPP can be obtained by linearizing equations around an operating point of the power system. This will produce a generic linearized model of the power system. The linear model of the power system can be performed as follows [11]:
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
The linear form of TE, EQ and VT is
 (15)
(15)
2.1 Dynamic model of LPP
Usually, large-scale PV park can be modelled with four momentous parts, PV arrays, boost DC/DC converter, power electronic DC/AC converter and the controllers associated with it. The output current of PV array shown in Figs. 1 and 2 is as follows [12-13]:

Fig. 2 Equivalent circuit of a PV array with Ns series module and Np parallel module
 (16)
(16)
The photovoltaic current is influenced by irradiation and temperature as
 (17)
(17)
The diode saturation current TSA can be represented by
 (18)
(18)
for output boost DC/DC converter, we have
 (19)
(19)
With the directions of the currents shown in Fig. 1, differential equation related to LPP DC-link can be introduced as
 (20)
(20)
On the other side, for ITA can be written as

 (21)
(21)
Thus, the linear model of converter using Eq. (21) can be expressed by

 (22)
(22)
2.2 Proposed Phillips-Heffron model for multi- machine power system with installed LPP
It is possible to obtain the full-state system model in the following form:
 (23)
(23)





by denoting






Thus, the Phillips-Heffron model of a multi- machine power system with an installed LPP can be depicted according to Fig. 3.
3 Controller structure of LPP
The proposed control strategy is two-fold, active power control and reactive power control (or voltage control). The active power and voltage are controlled by adjusting c and ρ, respectively. The controller aims to enhance the damping of poorly damped modes using both local and remote signals. The wide-area supplementary damping controller (WASDC) of LPP is a 2nd-order lead-lag compensator, as shown in Fig. 1. The input signal of WASDC relies on remote signal choice inspection by geometric technique (introduced in Section 5.2). The output signal (vWASDC) is subject to a lower limit  and an upper limit
and an upper limit  The capability of the converter input signals (c and ρ) to regulate damping is checked by the singular value decomposition (SVD) analysis (introduced in Section 5.1). The time-delay operator exp(-sτd) is often calculated by a three-order Pade approximation [9, 14].
The capability of the converter input signals (c and ρ) to regulate damping is checked by the singular value decomposition (SVD) analysis (introduced in Section 5.1). The time-delay operator exp(-sτd) is often calculated by a three-order Pade approximation [9, 14].
4 Test system
Modified version of 5-area 16-machine 68-bus test system (see Fig. 4) is supposed for study. It is an interconnected test system of New England (NETS) and New York power system (NYPS). The general description of the test system is given in Ref. [15]. Five separate areas are: NETS (Area 5) consisting of G1-G8 with a LPP, NYPS (Area 3) consisting of G9-G12, and three areas consisting of G13, G14 and G15, respectively. Generators G1-G12 are equipped with IEEE PSS2B to provide damping signal for local and inter-area oscillatory modes [16]. To investigate the impact of LPP on the dynamic stability of this system, a LPP equipped with hybrid controller is integrated at bus 16 in Area 5.

Fig. 3 Phillips-Heffron model of a multi-machine power system with an installed LPP

Fig. 4 Modified 5-area 16-machine 68-bus power system
5 Implementation and concurrent design of controllers
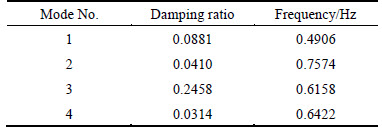
The dynamic model of multi-machine power system including LPP presented in previous sections is analyzed to perform time-domain simulations. From modal analysis resulting from linearized equations, the test system has four inter-area oscillatory modes with damping ratios of 0.0881, 0.041, 0.2458 and 0.0314, respectively. Modes 1 and 3 with sufficient damping ratio while modes 2 and 4 with frequencies of 0.7574 and 0.6422 are lightly damped.
Table 1 Inter-area oscillatory modes
According to Figs. 5 and 6, 365 operating points for daily solar irradiation and temperature are considered for LPP operation [17]. To determine the critical operating point, the following index is used:
 (24)
(24)
The variations of CI in 365 operating points are illustrated in Fig. 7. As demonstrated in Table 2, at fourteen points, CI has greater value than other points. Thus, fourteen points with solar irradiations and temperatures given in Table 2 are selected as critical operating points in optimization procedure.

Fig. 5 Daily irradiation across a year

Fig. 6 Daily temperature across a year

Fig. 7 Variations of CI at different operating points
Table 2 Data of critical operating pints

The main objective of the hybrid controller is to enhance the damping of the system electromechanical modes to maintain the stability.
The eigenvalues associated with different operating points varying with the solar irradiation and temperature should be considered during the optimal design procedure of controllers. Thus, the two-target function TF is systematized as follows:
 (25)
(25)


Subject to

where Sv is the solution vector, s* and x* are the desired minimum real part and damping ratio to be achieved, variable Ωcop is the set of critical operating points for which the optimization is conducted. Fourteen critical operating points, COP1 to COP14, as demonstrated in Fig. 5, are considered for optimization.
Flowchart of the proposed damping controller (including hybrid controller and PSS2Bs) design is illustrated in Fig. 8. To equip LPP with WASDC, the most effective input of LPP converter is chosen by SVD technique (SVD technique has been delineated in Ref. [18]). At first, over an extensive range of operating situations, the minimum singular value is extracted. The total generated active power of system is changed within the range of 0.7-1.8 pu. At each operating point, the system based on presented model is linearized, the electromechanical modes are specified, and the SVD-based controllability calculation is implemented. Hybrid controller of LPP has been made of two types of signals, local and global signals. Wide-area control based on remote signals offers higher observability and controllability of inter-area oscillatory modes. This type of control is appropriate for damping of inter-area swings. From an economic perspective, a remote signal as feedback input of WASDC should be determined to get sufficient damping. In this research, geometric approach-based joint controllability/observability criterion (GAJCOC) (introduced in Ref. [19]) is employed to find the most practicable feedback of wide-area signal for WASDC. The critical operating points (COP1 to COP14) are calculated by an analysis of solar irradiation and temperature associated with LPP and its interaction with undamped modes. To solve the corresponding multi-target controller design problem, the MTGSA technique has been applied [20-23]. The algorithm described in Fig. 10 is used in MTGSA technique. Once solutions based on the estimated Pareto-optimal sets are found by MTGSA, it is needed to pick out one among them for implementation. A decision making procedure based on TOPSIS style illustrated in Fig. 10 (introduced in Ref. [24]) is conducted to calculate the best compromise solution from the Pareto-optimal archive obtained by MTGSA method.

Fig. 8 Flow diagram of controller design
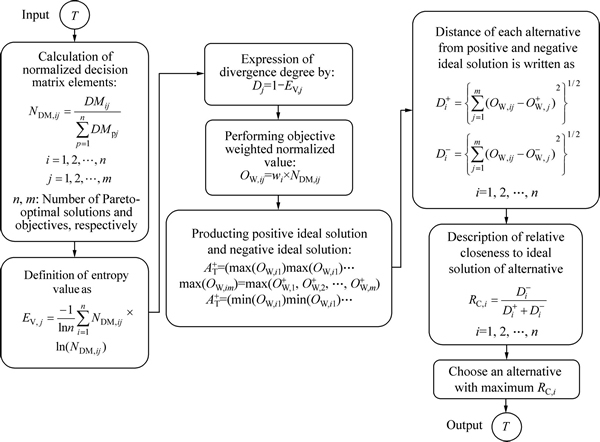
Fig. 9 Sub-flow diagram of T for design procedure delineated in Fig. 7
5.1 SVD analysis application to select best input of LPP converter
Over the determined range of operating states, the ability of the LPP converter inputs to handle the oscillatory modes is shown in Figs. 11-13. It can be seen that controllability of both inputs χ and ρ increase by the system loading, with χ having the higher value than ρ.
5.2 Geometric method application to choose remote control signal
Eighteen signals (either the rotor angle difference of different machines or active power of tie-lines) are used as remote signals candidate, as listed in Table 3. The GAJCOC of different remote signals with respect to four inter-area modes in Fig. 14 shows that signal RS8 (d13-15) has the largest GAJCOC with respect to modes 1-4. Thus, d13-15 is selected as impressive feedback signal for the WASDC because it has comparatively the largest GAJCOC.

Fig. 10 Sub-flow diagram of S for design procedure delineated in Fig. 8

Fig. 11 Minimum singular values for both converter inputs of LPP with respect to Mode 1

Fig. 12 Minimum singular values for both converter inputs of LPP with respect to Mode 2
The design procedure of hybrid controller of LPP and PSS2B of synchronous generators by employing two target functions (33) is performed using MTGSA method.
In two-dimensional space, the Pareto-optimal archive obtained by MTGSA has been depicted in Fig. 15. Decision maker can choose the best solution among this archive to be implemented in design process. Due to complex nature of decision making, it needs to be addressed by some precise ways. TOPSIS approach is performed in this study. According to Fig. 9, TOPSIS is applied and the obtained values are given in Table 4. After controller planning, all modes have ξ>0.05. Damping ratios of four inter-area oscillatory modes at 365 operating points are plotted in Fig. 16. It can beconcluded that all inter-area modes have been enhanced at all operating points.
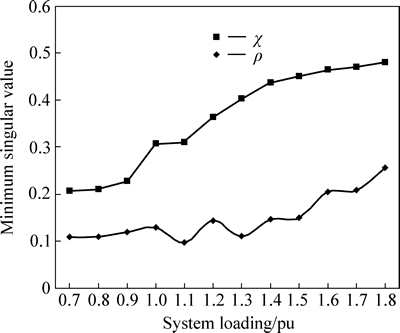
Fig. 13 Minimum singular values for both converter inputs of LPP with respect to Mode 4
Table 3 Remote signal candidate


Fig. 14 Comparison of GAJCOC related to modes 1-4 for RS1 to RS18

Fig. 15 Pareto-optimal archive associated with  and
and 
Table 4 Variable setting of LPP controller obtained via TOPSIS

By imposing a three-phase self-clearing fault at lines 38-33 for 100 ms, the results of the linear analysis are verified. As an example, the results related to dynamic interaction of two speed differences for COP6, Δω1-12 and Δω8-15 are plotted in Fig. 17 in two states. It can be seen that the presence of hybrid controller of LPP can enhance dynamic stability of the test system. The numerical values of integration time absolute error (ITAE) and shape of demerit (SD) indices (introduced in Refs. [25-26]) have been extracted according to Fig. 3, as shown in Fig. 18. The results demonstrate that proposed controller can provide suitable damping for critical conditions in power system.

Fig. 16 changes of inter-area modes damping ratios at different operating points after controller designing:

Fig. 17 Dynamic response of power system for operating point COP6
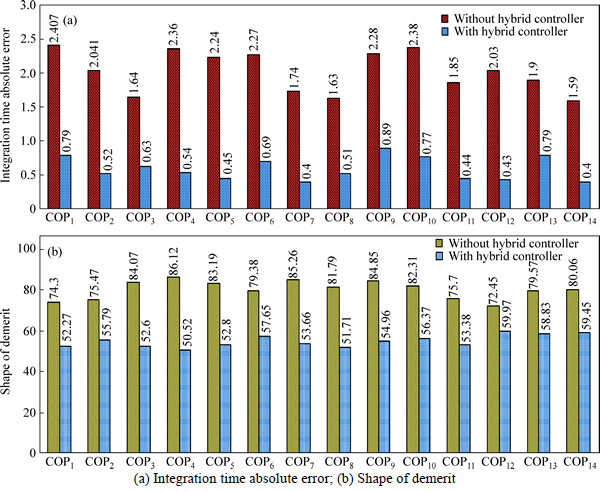
Fig. 18 Values of performance indices for COP1-COP14:
6 Conclusions
1) High penetration and different natures of LPP compared with conventional generation units place an increased responsibility on power system planners related to studying its impact on power system dynamic.
2) In a mathematical framework, the formula-based modeling of LPP in a multi-machine power grid is analyzed. The Phillips-Heffron illustration verified is compatible with small-signal scrutinizes. To investigate the impact of LPP in power system, the created state- space model can be participated in power network analysis tools. The employed regular modeling directs the investigators to a precise representation of multi- machine power system with LPP. The established model is used in realizing the interactions to fitly appoint the mandatory controllers to improve the small-signal stability.
3) A small-signal scrutiny based on the model presented in this work is carried out on a modified 16-machine 68-bus test system with large-scale LPP. It is shown that the power system is involved with critical operating points. The hybrid controller of LPP with wide-area signals is incorporated to improve the damping of the inter-area oscillations.
4) By using linear model presented in this work, eigenvalues of the system are obtained by SSS and optimization problem has been established by the real part and damping ratio of lightly damped oscillation modes. The MTGSA algorithm based on TOPSIS method is developed for coordinated design of LPP controller and PSS2B of synchronous generators. Multiple test results show a significant improvement of the power network frequency and damping responses. This work demonstrates that the proposed control scheme can consistently enhance network damping with synchronous machines and LPP over a wide range of operating conditions.
Appendix
0<ρ<1, 0<χ<2π, Imp=7.61 A, Vmp=26.3 V, Pmax= 200.143 W, ISC=8.21 A, VOC=32.9 V, KV=-0.1230 V/K, KI=0.0032 A/K, 
 ad=1.3, RP=415.405 Ω, RS=0.221 Ω.
ad=1.3, RP=415.405 Ω, RS=0.221 Ω.
Nomenclature
LPP Large-scale photovoltaic park
SSS Small-signal scrutiny
SVD Singular value decomposition
MTGSA Multi-target gravitational search algorithm
TOPSIS Technique for order preference by similarity to ideal solution
IEA-PVT International energy agency-photovoltaic technology plan
SSAT Small-signal analysis toolbox
POD Power oscillation damping
LQG Linear quadratic Gaussian
PV Photovoltaic
PSS Power system stabilizer
PWM Pulse-width modulation
VSI Voltage source inverter
WASDC Wide-area supplementary damping controller
NETS New England test system
NYPS New York power system
GAJCOC Geometric approach based on joint controllability/observability criterion
ITAE Integration time absolute error
SD Shape of demerit
H Inertia constant ((W・s)/(V・A))
TE Electrical torque (N・m)
TW Washout time constant (s)
A State matrix
B Input matrix
ζ,s Damping ratio and real part of eigenvalue
Cdc,VDC DC link capacitance and voltage (μF and V)
d, ω Rotor angle and speed of synchronous machines (rad and rad/s)
ωs Synchronous angle speed (rad/s)
TA, KA Regulator time constant and gain
upss PSS control signal
τd Time delay (s)
T1, …, T4 Lead and lag time constant of controller (s)
IPV Photovoltaic current (A)
I light-generated current at nominal condition usually at 25 °C and 1000 W/m2 (A)
light-generated current at nominal condition usually at 25 °C and 1000 W/m2 (A)
KI short-circuit current/temperature cefficient
T, Tn Actual and nominal temperature (K)
Ir, Actual and nominal irradiation on device surface (W/m2)
Actual and nominal irradiation on device surface (W/m2)
NP, Ns Number of parallel and series modules
ISA Saturation current (A)
 Nominal short-circuit current (A)
Nominal short-circuit current (A)
 Nominal open-circuit voltage (V)
Nominal open-circuit voltage (V)
ad Diode constant
 thermal voltage of Ns series-connected modules at nominal temperature Tn
thermal voltage of Ns series-connected modules at nominal temperature Tn 
Kbol Boltzmann constant (1.3806503×10-23 J/K)
q Electron charge (1.60217646×10-19 C)
Eg Bandgap energy of semiconductor (1.12 eV)
RS Equivalent series resistance of array (Ω)
RP Equivalent parallel resistance of array (Ω)
D dc-dc converter duty ratio (%)
ηb Efficiency of the boost converter (%)
VA PV array output voltage (V)
kSPWM Constant for sinusoidal pulse-width modulation (SPWM) (KSPWM=0.5)
 Direct axis synchronous and transient reactances, respectively, of synchronous generator
Direct axis synchronous and transient reactances, respectively, of synchronous generator
D, M Machine damping and inertia coefficient
 Time constant of excitation circuit (s)
Time constant of excitation circuit (s)
 Generator internal and field voltage (V)
Generator internal and field voltage (V)
References
[1] CHEN H, PANG C. Organizational forms for knowledge management in photovoltaic solar energy industry [J]. Knowledge-Based Systems, 2010, 23 (8): 924-933.
[2] TAMIMI B, CANIZARES C, BHATTACHARYA K. System stability impact of large-scale and distributed solar photovoltaic generation: The case of Ontario, Canada [J]. IEEE Transactions on Sustainable Energy, 2013, 4 (3): 680-688.
[3] AHADI A, GHADIMI N, MIRABBASI D. Reliability assessment for components of large scale photovoltaic systems [J]. Journal of Power Sources, 2014, 264: 211-219.
[4] HOSSAIN M, SAHA T, MITHULANANTHAN N, POTA H. Robust control strategy for PV system integration in distribution systems [J]. Applied Energy, 2012, 99: 355-362.
[5] EFTEKHARNEJAD S, VITTAL V, HEYDT G T, KEEL B, LOEHR J. Small signal stability assessment of power systems with increased penetration of photovoltaic generation: a case study [J]. IEEE Transactions on Sustainable Energy, 2013, 4 (4): 960-967.
[6] SHAH R, MITHULANANTHAN N, LEE K. Large-scale PV plant with a robust controller considering power oscillation damping [J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 106-116.
[7] MAHMOUD M, AZHER HUSSAIN S, ABIDO M. Modeling and control of microgrid: An overview [J]. Journal of the Franklin Institute, 2014, 351 (5): 2822-2859.
[8] YANG B, SUN Y. A new wide area damping controller design method considering signal transmission delay to damp interarea oscillations in power system [J]. Journal of Central South University, 2014, 21: 4193-4198.
[9] SHAH R, MITHULANANTHAN N, LEE K, BANSAL R. Wide-area measurement signal-based stabiliser for large-scale photovoltaic plants with high variability and uncertainty [J]. IET Renewable Power Generation, 2013, 7 (6): 614-622.
[10] SHAH R, MITHULANANTHAN N, BANSAL R. Damping performance analysis of battery energy storage system, ultracapacitor and shunt capacitor with large-scale photovoltaic plants [J]. Applied Energy, 2012, 96: 235-244.
[11] ZARGHAMI M, CROW M, JAGANNATHAN S. Nonlinear control of FACTS controllers for damping interarea oscillations in power systems [J]. IEEE Transactions on Power Delivery, 2010, 25(4): 3113-3121.
[12] VILLALVA M, GAZOLI J. Comprehensive approach to modeling and simulation of photovoltaic arrays [J]. IEEE Transactions on Power Electronics, 2009, 24(5): 1198-1208.
[13] LORENTE D, PEDRAZZI S, ZINI G, ROSA D, TARTARINI P. Mismatch losses in PV power plants [J]. Solar Energy, 2014, 100: 42-49.
[14] YANG B, SUN Y. A novel stabilization approach for small signal disturbance of power system with time-varying delay [J]. Journal of Central South University, 2013, 20: 3522-3527.
[15] ROGERS G. Power system oscillations [M]. Boston, USA: Kluwer Academic Publishers, 2000.
[16] KAMWA I, GRONDIN R, TRUDEL G. IEEE PSS2B versus PSS4B: The limits of performance of modern power system stabilizers [J]. IEEE Transactions on Power Systems, 2005, 20(2): 903-915.
[17] SodaService. Solar energy services for professionals[EB/OL]. http://www.soda-pro.com
[18] DEHGHANI M, SHAYANFARD B, KHAYATIAN A. PMU ranking based on singular value decomposition ofdynamic stability matrix [J]. IEEE Transactions on Power Systems, 2013, 28(2): 2263-2270.
[19] YAO W, JIANG L, WEN J, WU Q, CHENG S. Wide-area damping controller of FACTS devices for inter-area oscillations considering communication time delays [J]. IEEE Transactions on Power Systems, 2014, 29(1): 318-329.
[20] NARIMANI M, VAHED A, AZIZIPANAH R, JAVIDSHARIFI M. Enhanced gravitational search algorithm for multi-objective distribution feeder reconfiguration considering reliability, loss and operational cost [J]. IET Generation, Transmission & Distribution, 2014, 8(1): 55-69.
[21] ZHANG W, NIU P, LI G, LI P. Forecasting of turbine heat rate with online least squares support vector machine based on gravitational search algorithm [J]. Knowledge-Based Systems, 2013, 39: 34-44.
[22] PRECUP R, DAVID R, PETRIU E,  M, PREITL S, FODOR J. Evolutionary optimization-based tuning of low-cost fuzzy controllers for servo systems [J]. Knowledge-Based Systems, 2013, 38: 74-84.
M, PREITL S, FODOR J. Evolutionary optimization-based tuning of low-cost fuzzy controllers for servo systems [J]. Knowledge-Based Systems, 2013, 38: 74-84.
[23] ALI A, MEHDI A. A multi-objective gravitational search algorithm based approach of power system stability enhancement with UPFC [J]. Journal of Central South University, 2013, 20(6): 1536-1544.
[24] YE F, LI Y. An extended TOPSIS model based on the Possibility theory under fuzzy environment [J]. Knowledge-Based Systems, 2014, 67: 263-269.
[25] SHAYEGHI H, SAFARI A, SHAYANFAR H. PSS and TCSC damping controller coordinated design using PSO in multi-machine power system [J]. Energy Conversion and Management, 2010, 51 (12): 2930-2937.
[26] SHAYEGHI H, SHAYANFAR H, JALILZADEH S, SAFARI A. Multi-machine power system stabilizers design using chaotic optimization algorithm [J]. Energy Conversion and Management, 2010, 51(7): 1572-1580.
(Edited by FANG Jing-hua)
Received date: 2015-01-16; Accepted date: 2015-04-10
Corresponding author: H. Shayeghi; Tel: +98-451-5517374; Fax: +98-451-5512904; E-mail: hshayeghi@gmail.com

