��ʱ��ϵͳȫ��������ӦԤ����Ʋ���
�����ԣ���ѧ����������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժҪ����Դ�ʱ��ϵͳ���ͺ�ʱ�䳤������ʱ����ص㣬���һ�ֻ��ڸĽ�������Ⱥ�Ż�������ӦԤ������㷨�����øĽ�������Ⱥ�Ż��㷨��ʱ���ʱ��ϵͳģ�͵�ȫ���������б�ʶ���Ӷ��˷�Ԥ��ģ��ʧ���ϵͳ�������ܵ�Ӱ�죬���ҽ�����Ⱥ�Ż��㷨����Ԥ����ƹ���Ѱ�ţ���Ч���ϵͳ����Լ�������µ�����ֵ������⡣��������֤���᷽������Ч�Ժ���Խ�ԡ�
�ؼ��ʣ���ʱ��ϵͳ��ȫ������ʶ������ӦԤ����ƣ�����Ⱥ�Ż�
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2012)01-0195-07
All parameters adaptive predictive control strategy for long time-delay system
JIANG Zhao-hui, LI Xue-ming, GUI Wei-hua
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: A new all parameters adaptive predictive control (APAPC) method based on modified particle swarm optimization (PSO) was presented to solve the control problem in time-varing system with long time-delay. All parameters of system model were identified on-line using PSO to effectively overcome the predictive model mismatch. A PSO based predictive control was proposed in which the PSO was used for iterative optimization, which can solve the complicated optimization with various kinds of constraints. The simulation example proves the effectiveness.
Key words: long time-delay system; all parameter identification; adaptive predictive control; particle swarm optimization
�ڹ�ҵ���������У����ض�����˾����ݻ��ͺ��⣬������ͬ�̶ȵش����Ŵ��ͺ����磬���Ƚ������У����������ϵij����¶���Ϊ�����������Ƚ�����Ϊ�����������ı����Ƚ��ʵ����������ϳ����¶ȵ�Ӱ���ȻҪ��ʱһ��ʱ��(�����ʾ��ܵ�����Ҫ��ʱ��)�����ڴ��ڴ��ͺ�ʱ��ӣ�ʹ�ñ��������ܼ�ʱ��ӳϵͳ�����ܵ��Ŷ�����ʹ�����źŵ�������������ڻ��ؽ��ܵ����źź�����������Ҳ��Ҫ�����ͺ�ʱ����ԺŲ�����������ʹ֮�ܵ����ƣ���ˣ������Ĺ��̱�Ȼ��������Եij������ͽϳ��ĵ���ʱ�䡣�ɼ������д��ͺ�Ĺ��̱�����Ϊ�ǽ��ѿ��ƵĹ��̡����Ƶ������������ѡ��һ�����ʵĵ�ǰ���ƣ�ʹ��ϵͳδ�������ǡ����ϵͳ��������������ɼ���ʵ�ִ��ͺ���ƵĹؼ������ڶ�ϵͳ�����Ԥ�⡣Ŀǰ���ͺ�ϵͳ�Ŀ��Ʒ�����Ҫ����PID���ơ��ͺ����ơ�Ԥ������Լ����ܿ��Ƶȡ�PID�����ͺ�ϵͳ�Ĺؼ��ǿ�������������������ǰ���еIJ���������������ڷ�ֵԣ�Ⱥ���λԣ�ȵ������� ��[1]������������[2]������Ӧ��������[3]�Լ������Ż��������ķ���[4]���ͺ�ʱ��С��ϵͳ�ܻ�ýϺõ�Ч���������ڴ��ͺ����������������������� ��[5]���ͺ����Ʒ�����Ҫ����SmithԤ������[6-7]����ģ����[8]��Dahlin�㷨[9]�ȡ��ͺ����Ʒ������������ܹ�������ͺ�ϵͳ�Ŀ������⣬���ǣ��÷��������������ع��̵ľ�ȷ��ѧģ�ͣ���ģ����ʵ�ʶ��������ʱ������Ʒ�ʽ��������������ϵͳ���ȶ�����ʵ�ʹ�ҵ����ľ�ȷ��ѧģ�ͺ��ѻ�ã������˸÷�����ʵ��Ӧ�á����ڶ��iԤ�⡢�����Ż�������У�����Ե�Ԥ����ƾ��к�ǿ����Ӧ�Ժ�³���ԣ�Ϊ�ͺ�ϵͳ�Ŀ����ṩ����Ч;����������ѧ�����������ģ�Ϳ����㷨����̬������ơ�����Ԥ����ơ�Ԥ�⺯�����Ƶȶ���Ԥ����Ʒ���[10]������Ԥ�����(GPC)[11]��һ����Ҫ������Ӧ�㷨�����㷨��CARIMAģ��Ϊ�����������˳�ʱ�ε��Ż�����ָ�꣬��ϱ�ʶ����У�����ƣ����н�ǿ��³���Ժ�ģ��Ҫ��͵��ص㣬�ڹ�ҵ�ֳ��еõ��˹㷺��Ӧ ��[12]��Ȼ��������ʵ�ʵ��������̴���Ǹ��ӵĶ�̬���̣��������������ѧģ����ʵ�ʶ�������֮����ڽϴ����ʱ��ģ�������Ԥ����Ƶľ�ȷԤ�������ϴ�Ӱ�졣��ˣ�ʱ��ϵͳ���߱�ʶ�����Ѿ���Ϊϵͳ��ʶ������һ��ʮ�ֻ�Ծ���о����⡣��Ŀǰ�㷺Ӧ�õ����߱�ʶ�����ֶ�����С���˷�[13]�ͼ�����Ȼ�������߱�ʶ�����ĵ���ʵ�֡���Щ���������϶����ڻ����ݶ���Ϣ�ľֲ������������ҿ��Բ���ͳһ����ϵ����������Ŀ�꺯����������������߶ȷ�����ʱ����Щ����������������ȫ�����Ž⡣����Ⱥ�Ż�(Particle swarm optimization��PSO)�㷨��һ���µĻ���Ⱥ�����ܵ�����ʽȫ�������㷨�����кܺú�������ᱳ��[14]�������⡢�����ٶ���ʵ�֣��Է����ԡ������������н�ǿ��ȫ�������������ڿ�ѧ�о��빤��ʵ���еõ��˹㷺Ӧ��[15-17]����ʱ��ϵͳ����ϵͳʱ�䳣���ϴ���ѡ��ϴ�IJ������ڣ��Ӷ��г�ֵ�ʱ���������ʽȫ�������㷨�����������㡣��ˣ�����������Դ�ʱ��ϵͳԤ��ģ�͵IJ�����ʶ�����һ�ֻ��ڸĽ�����Ⱥ�㷨��ȫ������ʶ����������ʵʱ��ʶ��ģ�͵�ȫ�����������ҽ��Ľ�����Ⱥ�㷨����Ԥ��������ſ���������⣬��Ƴ�һ��ȫ��������ӦԤ������㷨��
1 PSO�㷨����
PSO�㷨��һ�ֻ�������Ⱥ���Ż����㷽����ÿ�����Ӵ����Ż������һ�����ܽ⡣ÿ�ε���ʱ��ÿ�����Ӷ��������������ﵽ������λ�ú��������������ﵽ������λ�������������ķ����ٶȡ�����ζ�����1�����ӷ�����1���������Ž⣬�������������ӻ�������������ֱ���������Ӷ��ҵ����Ž�Ϊֹ��
��PSO�У�ÿ�����忴������Dά�ռ��е�һ��û�������������������NPS��ʾ����������i�����ӵ�λ������Ϊ �����������ռ�ĸ�����ʷ���λ��Ϊ
�����������ռ�ĸ�����ʷ���λ��Ϊ ��Ⱥ�����������������������λ��Ϊ
��Ⱥ�����������������������λ��Ϊ ����i�����ӵķ����ٶ�Ϊ
����i�����ӵķ����ٶ�Ϊ �����ӵ��������ٶ�Ϊ
�����ӵ��������ٶ�Ϊ �����ӵ������ռ����ֵΪ
�����ӵ������ռ����ֵΪ ����СֵΪ
����СֵΪ �������Ż�����Ϊ��С��Ŀ�꺯��Jh���������̿�����Ϊ��
�������Ż�����Ϊ��С��Ŀ�꺯��Jh���������̿�����Ϊ��

 (1)
(1)
ʽ�У�i=1, 2, ��, NPS��c1Ϊ�������ӷ����������λ�÷���IJ�����c2Ϊ����������ȫ�����λ�÷��еIJ�����r1~U(0, 1)��r2~U(0, 1)��Ϊ2������������������Vi�е�ÿ�������������� ��d (d=1, 2, ��, D)���ڽ��������뿪�����ռ�Ŀ����ԣ�һ��vmaxdȡΪ
��d (d=1, 2, ��, D)���ڽ��������뿪�����ռ�Ŀ����ԣ�һ��vmaxdȡΪ �����У�
�����У� ����Ľ����ٶȹ�ʽ��д�ɣ�
����Ľ����ٶȹ�ʽ��д�ɣ�
 (2)
(2)
λ�ù�ʽΪ��
 (3)
(3)
ÿ�����ӵĸ�����ʷ���λ�ø��·���Ϊ��
 (4)
(4)
Ⱥ�����������������������λ�ø��·��̶���Ϊ��
 (5)
(5)
����(1)�еĵ�1��Ϊ�������Ϊ����Ȩ�أ���������ԭ���ٶ����ڶ��̶��ϵõ�����������������һʱ���ٶȶԵ�ǰ�ٶȵ�Ӱ�죬��Ӱ����е��ȫ����ֲ�������������Խ����ȫ����������Խǿ��Ϊ��ƽ��PSO�㷨��ȫ�����������;ֲ��������������IJ��÷����ԵĶ�̬����Ȩ��ϵ����ʽ�������ʽ���£�
 (6)
(6)
���� ��
�� �ֱ�Ϊ
�ֱ�Ϊ �����ֵ����Сֵ��JΪ���ӵ�ǰ��Ŀ�꺯��ֵ��Javg��Jmin�ֱ�Ϊ��ǰ�������ӵ�ƽ��Ŀ��ֵ����СĿ��ֵ��
�����ֵ����Сֵ��JΪ���ӵ�ǰ��Ŀ�꺯��ֵ��Javg��Jmin�ֱ�Ϊ��ǰ�������ӵ�ƽ��Ŀ��ֵ����СĿ��ֵ��
����ѧϰ���ӵ�ѡ���������첽�仯��ѧϰ���ӣ�����ʹ�����Ż��ij�ʼ�Σ����Ӿ��н�ǿ������ѧϰ�����ͽ��������ѧϰ��������ǿȫ�����������������Ż��ĺ��ڣ����Ӿ��н�ǿ�����ѧϰ�����ͽ���������ѧϰ������������������ȫ�����Ž⡣ѧϰ���ӵı仯��ʽΪ��

 (7)
(7)
���У�c1,ini��c2,ini�ֱ�Ϊc1��c2�ij�ʼֵ��c1,fin��c2,fin�ֱ�Ϊc1��c2�ĵ�����ֵ���㷨�Ļ����������¡�
Step 1���趨�������������ʼ����Ⱥ�и����ӵ�λ�ú��ٶȣ�
Step 2������ÿ�����ӵ���Ӧ�ȣ�����ǰ������λ�ú���Ӧֵ�洢�ڸ����ӵ�Pi�У�������Pi����Ӧֵ���Ÿ����λ�ú���Ӧֵ�洢��Pg�У�
Step 3����ʽ(1)~(3)�������ӵ��ٶȺ�λ�ƣ�
Step 4������ʽ(6)��(7)����Ȩ�ص�ѧϰ���ӣ�
Step 5����ÿ�����ӣ�����ʽ(4)��������ʷ���λ�ã�
Step 6������ʽ(5)�����������������������λ�ã�
Step 7���жϵ��������Ƿ�����ֹͣ�����������㣬����ֹͣ����������������Step 3���� ������
2 ����PSO�㷨��ȫ������ʶ����
2.1 ��������
ʱ��ϵͳ���ݺ���������Ϊ��
 (m��n)
(m��n)
Ϊ�˼�ʡ����ʱ�����t��������ױ�������������ɢ�����ã�
 (8)
(8)
ʽ�У� ��
��
 ��
��
д�ɲ�ַ�����ʽΪ��
 (9)
(9)
��Ҫ���ʶ����ϵͳģ�Ͳ��� ʱ�����ȱ�ʶ��ɢģ�Ͳ���
ʱ�����ȱ�ʶ��ɢģ�Ͳ��� ��Ȼ��ת��Ϊ��Ч������ģ�Ͳ������Է�����������ϵͳ�ĸ��ֶ�̬����̬���ԡ�
��Ȼ��ת��Ϊ��Ч������ģ�Ͳ������Է�����������ϵͳ�ĸ��ֶ�̬����̬���ԡ�
2.2 ��ʶ�㷨�Ƶ�
����һ��ʱ���ʱ��ϵͳģ��Ϊ��

����


�� ��
��
 ��kʱ�̵Ĺ���ֵ����ϵͳʵ�������ģ�����������Ϊ��
��kʱ�̵Ĺ���ֵ����ϵͳʵ�������ģ�����������Ϊ��


����ʶģ����ʵ��ϵͳ��ͬʱ�� ����������ָ�꺯������[18]��
����������ָ�꺯������[18]��

 (10)
(10)
���У�hΪ�������ڿ���(�������仯�ܿ죬��ѡ��ԽС��hЧ����Խ��)����Ϊ�������ӣ�0���ˡ�1���������ӵ�������Ը��õ���Ӧ����ʱ�䶯̬ϵͳ����Ϊ������ƽ�����ϵ��������ƽ���������ϵͳ�����һ��ȡΪ0.3~0.5�� Ϊ
Ϊ ʱ�̵����Ų�������ֵ��
ʱ�̵����Ų�������ֵ��
����PSO�㷨��ȫ�������߱�ʶ�������㲽�����¡�
Step 1���趨�������������ʼ����Ⱥ�и����ӵ�λ�ú��ٶȡ�
Step 2��ʵʱ�ɼ�y(k)��u(k) ��
Step 3������ʽ(10)����ÿ�����ӵ���Ӧ�ȣ�����ǰ�����ӵ�λ�ú���Ӧֵ�洢�ڸ����ӵ�Pi �У�������Pi����Ӧֵ���Ÿ����λ�ú���Ӧֵ�洢��Pg�С�
Step 4������ʽ(1)~(3)�������ӵ��ٶȺ�λ�ơ�
Step 5������ʽ(6)��(7)����Ȩ�غ�ѧϰ���ӡ�
Step 6����ÿ�����ӣ�����ʽ(4)��������ʷ���λ�á�
Step 7������ʽ(5)�����������������������λ�á�
Setp 8���жϵ��������Ƿ�����ֹͣ�����������㣬����ֹͣ����������������Step 4����������
ע1��ϵͳ������ʶ��Ԥ����������2����ͬ�Ĺ��̣����ϵΪ���ȸ��ݱ�ʶ�㷨ʵʱ���Ԥ��ģ�͵IJ������ٸ�������õ�Ԥ��ģ����ƿ����㷨�����ڱ�ʶ������ʵʱ�ģ���ˣ������õ�ģ��������ʱ��ġ���Ԥ������㷨��ÿһ���������¼����������ÿһ������ʱ��Ԥ��ģ�Ͷ����ɱ�ʶ���̻�ã���ˣ�Ԥ������㷨���ʱ�õ�������ʱ����ģ�͡�
3 ����PSO��Ԥ������㷨���
3.1 ����ԭ��
��PSO�㷨���뵽����Ԥ����ƵĹ����Ż��У������PSO��ʶ����ʵʱ��̬ģ�����ϣ��γ�һ��ȫ��������ӦԤ������㷨��PSO��̬��ʶ��ͨ��ʵʱ�ɼ���������������ݣ����߱�ʶ���ع���ģ�͵IJ�����ʹԤ��ģ�͵IJ������汻�ع��̵IJ����仯���仯��PSO�Ż�������PSO��̬��ʶ���õ���Ԥ��ģ�ͣ�����PSO�㷨�����ʹĿ�꺯��ֵ��С�Ŀ���������Ȼ���ù����Ż����Զ�ϵͳʵʩ���ơ��㷨ԭ����ͼ��ͼ1��ʾ��
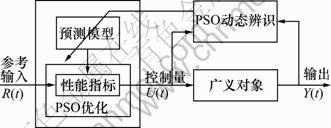
ͼ1 ����PSO��ȫ��������ӦԤ�����ԭ����ͼ
Fig.1 Block diagram of PSO based APAPC
3.2 Ԥ��ģ��
��GPC�У������ܿ��Իع���ֻ���ƽ��(Controlled auto regressive integrated moving average��CARIMA)ģ�����������Ԥ��ֵ��
 (11)
(11)
ʽ�У� ��
��  ��
��

 ��
�� ��dΪ���ͺ�ʱ�䣬e(t)Ϊ��������
��dΪ���ͺ�ʱ�䣬e(t)Ϊ��������
����ʽC(z-1)������������������ԣ���ʵ���к��ѹ��ƣ���ˣ�һ�㽫����Ϊ1��
3.3 Ŀ�꺯��
����Ԥ�����(Generalized predictive control��GPC)��Ŀ�꺯����д�ɣ�
 (12)
(12)
ʽ�У� Ϊtʱ�̶�t+jʱ��ϵͳ���ֵ��Ԥ��ֵ��N1��N2�ֱ�Ϊ���Ԥ��ʱ�����СԤ��ʱ��NuΪ����ʱ��
Ϊtʱ�̶�t+jʱ��ϵͳ���ֵ��Ԥ��ֵ��N1��N2�ֱ�Ϊ���Ԥ��ʱ�����СԤ��ʱ��NuΪ����ʱ�� ��
�� �ֱ�Ϊ�������Ȩϵ���Ϳ���������Ȩϵ����
�ֱ�Ϊ�������Ȩϵ���Ϳ���������Ȩϵ����

 Ϊ�ο��켣(0��
Ϊ�ο��켣(0�� ��1)��
��1)��
Ԥ����Ƶ�Ŀ���Ǽ���δ�������������� ��ʹϵͳδ�����ֵ
��ʹϵͳδ�����ֵ ��һ����ʱ���ھ����ܽӽ�
��һ����ʱ���ھ����ܽӽ� ������ͨ������һ������Ԥ���������Ӷ���С��J��ʵ�ֵġ�
������ͨ������һ������Ԥ���������Ӷ���С��J��ʵ�ֵġ�
Ϊ����С��Ŀ�꺯��J�����Ƚ���������ʷ����(��������ϵͳ�������ʷֵ)�Լ�δ������������ ��
�� �ĺ�����Ȼ��Ŀ�꺯��J�ɿ�����δ�������������еĺ�����ͨ����С��J���ɻ�����ſ���������
�ĺ�����Ȼ��Ŀ�꺯��J�ɿ�����δ�������������еĺ�����ͨ����С��J���ɻ�����ſ���������
��Ϊϵͳ��ʱ�����ԣ�ȡʱ��N 1��N2�ֱ�Ϊd+1��d+N�������ǵĵ�1�����Ԥ��ֵΪ �������йصĿ�����Ϊ
�������йصĿ�����Ϊ ������ʷ����������
������ʷ����������
3.4 �ಽԤ���������ʽ
Ϊ���Ż�Ŀ�꺯��J��������� ( )ʱ�̵�Ԥ��ֵ����������Diophantine���̣�
)ʱ�̵�Ԥ��ֵ����������Diophantine���̣�
 (13)
(13)
ʽ�У� ��
��
 ��
��
 ��
��
��ʽ(13)����ͬʱ���� ���ã�
���ã�

 (14)
(14)
��ʽ(13)����ʽ(14)���ã�

��

(15)
���� �Ľ�Ϊ
�Ľ�Ϊ ��ʽ(15)�������Ϊδ��ʱ��ֵ�����ԣ���������Ԥ��ֵ�ɱ�ʾΪ��
��ʽ(15)�������Ϊδ��ʱ��ֵ�����ԣ���������Ԥ��ֵ�ɱ�ʾΪ��

ʽ�У� ��
��
��ˣ����� ��Ϊ
��Ϊ




д�ɾ�����ʽΪ��
 (16)
(16)
ʽ�У�
 ��
�� ��
��
 ��
�� ��
��
 ��
��
ע�ʽ(16)�к�2��ֻ���ȥʱ�̵�ֵ�йأ���ˣ��� ����
����
 ��
��
3.5 ����PSO�Ż������������
���ǹ�ҵ�����г�������3 ��Լ�����������źŷ�ֵԼ���������ź�����Լ��������źŷ�ֵԼ��[19]��������ά�� ������ʽ(12)��Ϊ����Ⱥ�Ż��㷨��Ŀ��ֵ����������PSO�㷨�Կ�������
������ʽ(12)��Ϊ����Ⱥ�Ż��㷨��Ŀ��ֵ����������PSO�㷨�Կ������� ���� Ѱ�š�
���� Ѱ�š�
4 �����о�
���ʱ�Ͷ��ݺ���Ϊ ���������ʼ����ΪK=1��T=35����=40��t=300 sʱ�����������ΪK=1.15��T=45����=53������PSO�㷨����ģ�ͽ���ʵʱ��ʶ��������PSO�㷨���������ſ�������������Ҫ�����������£���min=0.6����max=0.9��c1,ini=2.5��c1,fin=0.5��c2,ini=0.5��c2,fin=2.5��Niter=200��Nps=60��N=5��Nu=2��Ts=10�����������ͼ2~6��ʾ��
���������ʼ����ΪK=1��T=35����=40��t=300 sʱ�����������ΪK=1.15��T=45����=53������PSO�㷨����ģ�ͽ���ʵʱ��ʶ��������PSO�㷨���������ſ�������������Ҫ�����������£���min=0.6����max=0.9��c1,ini=2.5��c1,fin=0.5��c2,ini=0.5��c2,fin=2.5��Niter=200��Nps=60��N=5��Nu=2��Ts=10�����������ͼ2~6��ʾ��
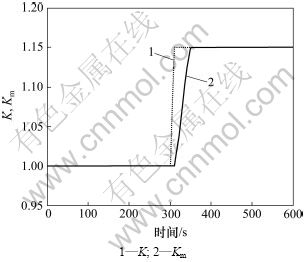
ͼ2 ģ�Ͳ���K��Km��ʶ���
Fig.2 Identified results of parameter K and Km
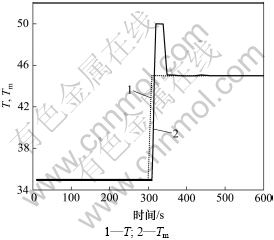
ͼ3 ģ�Ͳ���T��Tm��ʶ���
Fig.3 Identified results of parameter T and Tm
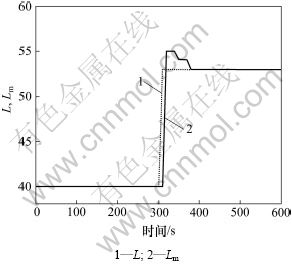
ͼ4 ģ�Ͳ���L��Lm��ʶ���
Fig.4 Identified results of parameter L and Lm

ͼ5 ϵͳ�������
Fig.5 Responses of system w and y(t)
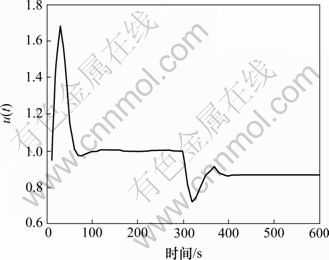
ͼ6 ����������
Fig.6 Control action u(t)
ͼ2~4��ʾΪϵͳ����K��T��L���仯ʱPSO�㷨�ı�ʶ�������ͼ2���Կ�������������������仯ʱ��PSO��ʶ�㷨�ܿ�����Ӧ��������仯�����к�ǿ�Ĺ���ʱ���ʱ��ϵͳ�ĸ�����������ͼ5���Կ���������Ԥ��ģ�͵õ���ʵʱ������ϵͳ����ܹ��ڽ϶�ʱ���ڿ˷��������ʱ���Ӱ�졣���ڲ�����PSO�㷨���Կ�������������⣬�Կ����������������趨����Ӧ��Լ������ͼ6���Կ������������仯���ͣ�������Ч���ٿ�������Ƶ���仯��ִ�л�����ɵIJ���Ӱ�졣
��ע����ǣ�����ʱ��Ϊģ��ϵͳ��ʱ��ϵͳ����Ӧ����������ϵͳ300 s��ǰ����һ����̬��300 s��ŷ��������仯����ˣ�ͼ2~4��ʾ��ǰ300 s������û�����������ϵͳ�������(ͼ5)������ϵͳʱ��Ϊ40 s����������Ϊ10 s����ϵͳ���������仯ʱ��ϵͳ��һ����̬���ɵ���һ����̬������Ӧ���߿϶����ͺ�1��ϵͳ�Ĵ��ͺ�ʱ���1���������ڣ�����ϵͳ�Ĺ������ԣ���ˣ�ϵͳǰ50 s������仯��Ϊ0��
5 ����
(1) ����һ�ָĽ���PSO�㷨��ʱ���ʱ��ϵͳ��ȫ�������������߱�ʶ��ʵʱ���¶���ģ�Ͳ������Ӷ��˷��������ʱ���ϵͳ�������ܵ�Ӱ�졣
(2) ���ǹ�ҵ�����еij���Լ������PSO�㷨Ӧ����Ԥ����ƹ����Ż����õ��������Լ��������ȫ�����Ž⡣
(3) ���㷨�ܹ�����ȷ�ر�ʶ������ʱ���������������Ŀ���Ч�������������õ�³���ԡ�
�ο����ף�
[1] ŷ����, �˵�Ӣ, ������. ���ڷ�ֵԣ�Ⱥ���λԣ�ȵ�PID����������������[J]. ����������Ӧ��, 2007, 24(5): 837-840.
[2] OU Lin-lin, GU Dan-ying, ZHANG Wei-dong. Optimal tuning method of PID controller based on gain margin and phase margin[J]. Control Theory & Application, 2007, 24(5): 837-840.
[3] Dey C, Mudi R K. An improved auto-tuning scheme for PID controllers[J]. ISA Transactions, 2009, 48(4): 396-409.
[4] Mizumoto I, Ikeda D, Hirahata T, et al. Design of discrete time adaptive PID control systems with parallel feedforward compensator[J]. Control Engineering Practice, 2010, 18(2): 168-176.
[5] Yu D L, Chang T K, Yu D W. A stable self-learning PID control for multivariable time varying systems[J]. Control Engineering Practice, 2007, 15(12): 1577-1587.
[6] Mirkin L. On the extraction of dead-time controllers and estimators from delay-free parametrizations[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 1-11.
[7] ̷��. ʱ���̸Ľ���SmithԤ����������[J]. ����������Ӧ��, 2003, 20(2): 297-301.
TAN Wen. Tuning of modified Smith predictor for processes with time delay[J]. Control Theory & Applications, 2003, 20(2): 297-301.
[8] ������, ����, ������. �Ժ�ͷ��Ժ�ʱ�Ͷ���SmithԤ�����������[J]. �Զ���ѧ��, 2000, 26(4): 485-490.
ZHANG Wei-dong, HE Xing, XU Xiao-ming. Smith predictor design for self-regulating and nonself-regulating plants[J]. Acta Automatica Sinica, 2000, 26(4): 485-490.
[9] ��궰, �ۻݺ�. ���ڸĽ�IMC�Ŀ������ȶ�ʱ���̿���[J]. ���������, 2005, 20(7): 727-731.
ZHU Hong-dong, SHAO Hui-he. Control for open-loop unstable plus dead-time processes based on modified internal model control[J]. Control and Decision, 2005, 20(7): 727-731.
[10] ����, ��ѧ��. ����Dahlin�������Ļ���ʱ���̿���[J]. ��ҵ�DZ����Զ���װ��, 2005, 2: 29-30.
DONG Yu, ZHU Xue-feng. Control algorithm applied to an integrating process with time delay based on the Dahlin controller[J]. Industrial Instrumentation & Automation, 2005, 2: 29-30.
[11] ϯԣ��, ���ΰ. Ԥ����ƶ����ۺ����۵Ļ���˼·���о���״[J]. �Զ���ѧ��, 2008, 34(10): 1225-1234.
XI Yu-geng, LI De-wei. Fundamental philosophy and status of qualitative synthesis of model predictive control[J]. Acta Automatica Sinica, 2008, 34(10): 1225-1234.
[12] Neshasteriz A R, A. Khaki Sedigh, Sadjadian. Generalized predictive control and tuning of industrial processes with second order plus dead time models[J]. Journal of Process Control, 2010, 20(1): 63-72.
[13] ������, ��ѧ��. Ԥ����Ƶ��о���״��չ��[J]. ʯ�ͻ����Զ���, 2005, 2: 27-31.
HUANG Xiang-yun, ZHU Xue-feng. The situation and prospect of predictive control[J]. Automation in Petro-chemical Industry, 2005, 2: 27-31.
[14] ������, ���ñ�, ���. ������ʽ���¯�¶ȷֲ�����ϵͳ��ʶ�㷨[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2008, 39(6): 1285-1290.
YU Shou-yi, CAO Yue-bin, ZHOU Xuan. Algorithm of parameter identification for temperature distributed parameter system of large-scale vertical quench furnace[J]. Journal of Central South University: Science and Technology, 2008, 39(6): 1285-1290.
[15] Garnier S, Gautrais J, Theraulaz G. The biological principles pf swarm intelligence[J]. Swarm Intelligence, 2007(1): 3-31.
[16] Parsopoulos K, Vrahatis M. Recent approaches to global optimization problems through particle swarm optimization[J]. Natural Computing, 2002, 1: 235-306.
[17] ������, ����. ��Ⱥ�㷨���о���״��չ��[J]. �㽭��ҵ��ѧѧ��, 2007, 35(2): 136-141.
WANG Wan-liang, TANG Yu. The state of art in particle swarm optimization algorithms[J]. Journal of Zhejiang University of Technology, 2007, 35(2): 136-141.
[18] van Ast J, Babuska R, de Schutter B. Particle swarms in optimization and control[C]//Proceedings of the 17th World Congress the International Federation of Automatic Control. Seoul�� Korea, 2008: 5133-5136.
[19] Lin W, Liu P X. Parameter estimation for time-varying system based on combinatorial PSO[C]//Proceedings of IFIP International Federation for Information Processing. Santiago, Chile, 2006: 357-368.
(�༭ �²ӻ�)
�ո����ڣ�2011-05-10�������ڣ�2011-07-25
������Ŀ��������Ȼ��ѧ�����ص�������Ŀ(60634020��61134006)��������Ȼ��ѧ����������Ŀ(61074117)
ͨ�����ߣ�������(1978-)���У����Ϻ����ˣ���ʿ�����¸��ӹ�ҵ���̽�ģ����ơ���ҵ��ϵͳ����������Ӧ�õ��о����绰��15874291486��E-mail: jjh0423@126.com

